
A Comparison of A* and RRT* Algorithms with Dynamic and Real Time
Constraint Scenarios for Mobile Robots
Jo
˜
ao Braun
1 a
, Thadeu Brito
2 b
, Jos
´
e Lima
3,4 c
, Paulo Costa
3 d
, Pedro Costa
3 e
and Alberto Nakano
1 f
1
Federal University of Technology - Paran
´
a, Toledo, Brazil
2
CeDRI - Research Centre in Digitalization and Intelligent Robotics, Portugal
3
INESC TEC - INESC Technology and Science, Faculty of Engineering of University of Porto, Portugal
4
CeDRI - Research Centre in Digitalization and Intelligent Robotics, Polytechnic Institute of Braganc¸a, Portugal
Keywords:
Mobile Robotics, Path Planning, A-Star, RRT-Star, Dynamics Simulation.
Abstract:
There is an increasing number of mobile robot applications. The demanding of the Industry 4.0 pushes the
robotic areas in the direction of the decision. The autonomous robots should actually decide the path according
to the dynamic environment. In some cases, time requirements must also be attended and require fast path
planning methods. This paper addresses a comparison between well-known path planning methods using a
realistic simulator that handles the dynamic properties of robot models including sensors. The methodology
is implemented in SimTwo that allows to compare the A* and RRT* algorithms in different scenarios with
dynamic and real time constraint scenarios.
1 INTRODUCTION
In the last decades the planning of movements has
attracted much attention from the academic and in-
dustrial sectors. Generally, the main goal is to al-
low mobile robots to run their own movements au-
tonomously. The sensing, together with the imple-
mentation of algorithms, assists the execution of these
tasks. However, for many of the situations, only join-
ing these two tools does not make the drive of the
robot so trivial.
The task becomes even more arduous when one
considers the actions of the physical laws applied dur-
ing the trajectory of the robot. Even the design, the
disposition of the environment and the task that the
robot will perform, influence the final result of the
autonomous movement. In this respect, trying to de-
velop a solution for any robot configuration and at the
same time dealing with any physical eventualities, is
of great value for the execution of the robotic appli-
a
https://orcid.org/0000-0003-0276-4314
b
https://orcid.org/0000-0002-5962-0517
c
https://orcid.org/0000-0001-7902-1207
d
https://orcid.org/0000-0002-4846-271X
e
https://orcid.org/0000-0002-0435-8419
f
https://orcid.org/0000-0002-3757-1427
cation (Choset et al., 2005). The importance of auto-
matic motion planning goes beyond the need to make
a mobile robot capable of calculating its own path.
The possibility of transforming the process into dy-
namic situations results in a wide range of new tasks,
such as avoiding obstacles in the trajectory while the
robot is already moving.
In this way, the objective of this work is to com-
pare the performance of two path planning algorithms
when considering the physical influences of the envi-
ronment in a mobile robot equipped with a distance
sensor. In this sense, the main contribution of this
work is the comparison of A* and Rapidly-exploring
Random Tree Star (RRT*). The same test situations
are applied in both, and then, the performance of
these algorithms are analyzed in the simulated envi-
ronment. As a comparison requires excessive testing,
robotics simulation arises as a friendly way to obtain
data. The simulated robot has the same characteristics
of the real robot, that is, all real sensing was modeled
for the environment created in the SimTwo.
This work is structured as follows. After the In-
troduction, the Related Work is presented in Section
2. Then, in Section 3, the Simulation Environment is
stated with the real robot information and the virtual
modeling. The Methodology and an overview of both
398
Braun, J., Brito, T., Lima, J., Costa, P., Costa, P. and Nakano, A.
A Comparison of A* and RRT* Algorithms with Dynamic and Real Time Constraint Scenarios for Mobile Robots.
DOI: 10.5220/0008118803980405
In Proceedings of the 9th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2019), pages 398-405
ISBN: 978-989-758-381-0
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

algorithms are explained in Section 4. The project Re-
sults are shown in Section 5 with the created scenar-
ios. The Conclusion and Future Work are discussed
in Section 6.
2 RELATED WORK
The classic problem of path planning called Piano
Mover’s is always used to demonstrate the logistics
of the best navigation of a three-dimensional body
among known obstacles (Schwartz and Sharir, 1983).
For the purpose of introducing probabilistic meth-
ods, (Kavraki et al., 1994) demonstrates the con-
cept of reducing the complexity of configuration free
space. However, this method can not be applied in
dynamic environments because of the need to recon-
struct the whole graph. This question is solved by
some variants of this method, such as: Lazy Proba-
bilistic Roadmap (PRM) (Bohlin and Kavraki, 2000)
and sampling based roadmap of trees (Plaku et al.,
2005).
In the simulation of this work, it was consid-
ered two of the most commonly applied algorithms
for path planning. The first algorithm is A* (Loong
et al., 2011), which uses the concept of algorithm A*
to demonstrate in a Graphical User Interface (GUI)
the mapping of a mobile robot going from the start-
ing point to the end point. In (Ducho
ˇ
n et al., 2014),
the navigation of a mobile robot in grid format maps
shows the differences in computational expenses for
different variations of A* algorithm. To create a
global map in low cost robot movements, (Cheng and
Wang, 2018) applies the A* in conjunction with the
Robotic Operational System (ROS). The second algo-
rithm applied in the simulations is the RRT*, which
calculates the paths by sampling the free space with
structures that resemble a tree. The tree structure gen-
erated by the RRT* is composed of several branches
and nodes, generated by random sampling of free
spaces (Moon and Chung, 2015). Comparing the per-
formance of the algorithm around 3D spaces gener-
ated by Point of Clouds, (Brito et al., 2017) demon-
strates the difference between computational time and
costs of PRM and RRT* algorithms through robot
state simulations. Changing the base code of the RRT,
(He et al., 2018) determines that for cases where the
path planning is in two-dimensional planes, the RRT-
Rectangular has good performance.
Acquiring the working environment of a robot has
always been a challenging task for robotic applica-
tions. However, this task has been simplified with the
development of sensors (Choset et al., 2005). Cur-
rently there are several types of sensors, so in this
work only the sensors that measure distances and lo-
calization are addressed. One of the most widely used
types of distance sensors in robotic applications is the
laser scanner, called LIDAR Sensors. As for exam-
ple the Sick sensor, demonstrated in (Ye and Boren-
stein, 2002), where the focus of the work was to de-
termine the problem of the mixed pixels and also tries
to construct a probabilistic range based on experimen-
tal results. Another example of this type of sensor is
presented by (Okubo et al., 2009), which applies the
Hokuyo sensor in smaller devices. This new approach
differs from Sick because Hokuyo has smaller size,
weight and power consumption. However, this device
has a very high cost and therefore (Lima et al., 2015)
presents the Piccolo LIDAR sensor, a low cost alter-
native and also its modeling to be applied in simulated
environments. Another situation that seeks the low
cost implementation is made by (Piardi et al., 2018),
which develops a precision system that can replace
the applications based on Ground Truth Systems.
3 SIMULATION ENVIRONMENT
In order to verify the performance of the algorithms
A* and RRT* considering the physical actions of
the environment, a 10 m
2
scenario was elaborated in
SimTwo 3D simulator with the modeling of the real
robot, sensing and the physical quantities involved.
Depending on the simulation results, the system will
be tested in real situations. This section defines the
real robot and its modeling, as well as the virtual sce-
nario made in SimTwo.
3.1 Real Robot
The robot’s design focuses on handling movements
in small environments, such as those in a home. The
real robot’s model that will be used in future work
can be seen in (Lima and Costa, 2017). The method
of movement of the robot is made by a differential
traction system, where two wheels are operated by in-
dependent motors and the third wheel is free. There-
fore, the robot has 3 DOF: (x, y, θ). For the embedded
sensing part, all of it is made to communicate with the
central computer. In this way, all data is controlled by
the computer, such as: the general control of the robot
and the sequence of movements to form the trajectory.
The hardware integrated in the robot consists of
several modules. The power of the robot is made
by a 12V battery, which by means of a DC/DC con-
verter, adapts to other voltages that other modules
need. The processing core runs in a Raspberry Pi 3
Model B, which handles a Kalman filter application
A Comparison of A* and RRT* Algorithms with Dynamic and Real Time Constraint Scenarios for Mobile Robots
399
and is also in charge of processing all data from the
low-level system. The low-level system is connected
to the central core via USB, consisting of two Arduino
Uno. The first one controls pitch motors and calcu-
lates odometry, while the second has a Pozyx UWB
tag - see (Lima and Costa, 2017; Piardi et al., 2018).
3.2 Virtual Robot Model
The basic simulation software presents a realistic
model of the 3D environment, with dynamic con-
straints similar to those found in the real environment.
Therefore, with this scenario created, it is possible
to validate the comparison approach of the two path
planning algorithms. Moreover, it is also of great im-
portance for future approaches, such as comparative
applications in real situations.
All dimensions of the real robot are fully faithful
to the simulated model, as well as the sensors em-
bedded in the real robot structure, as shown in Fig-
ure 1. The communication with the central computer
is modelled in the virtual environment too. That is,
the virtual robot also transmits the same motor con-
trol data and positioning. To access and switch the
communication between the virtual and the real robot,
a different IP address must be set to each one. The
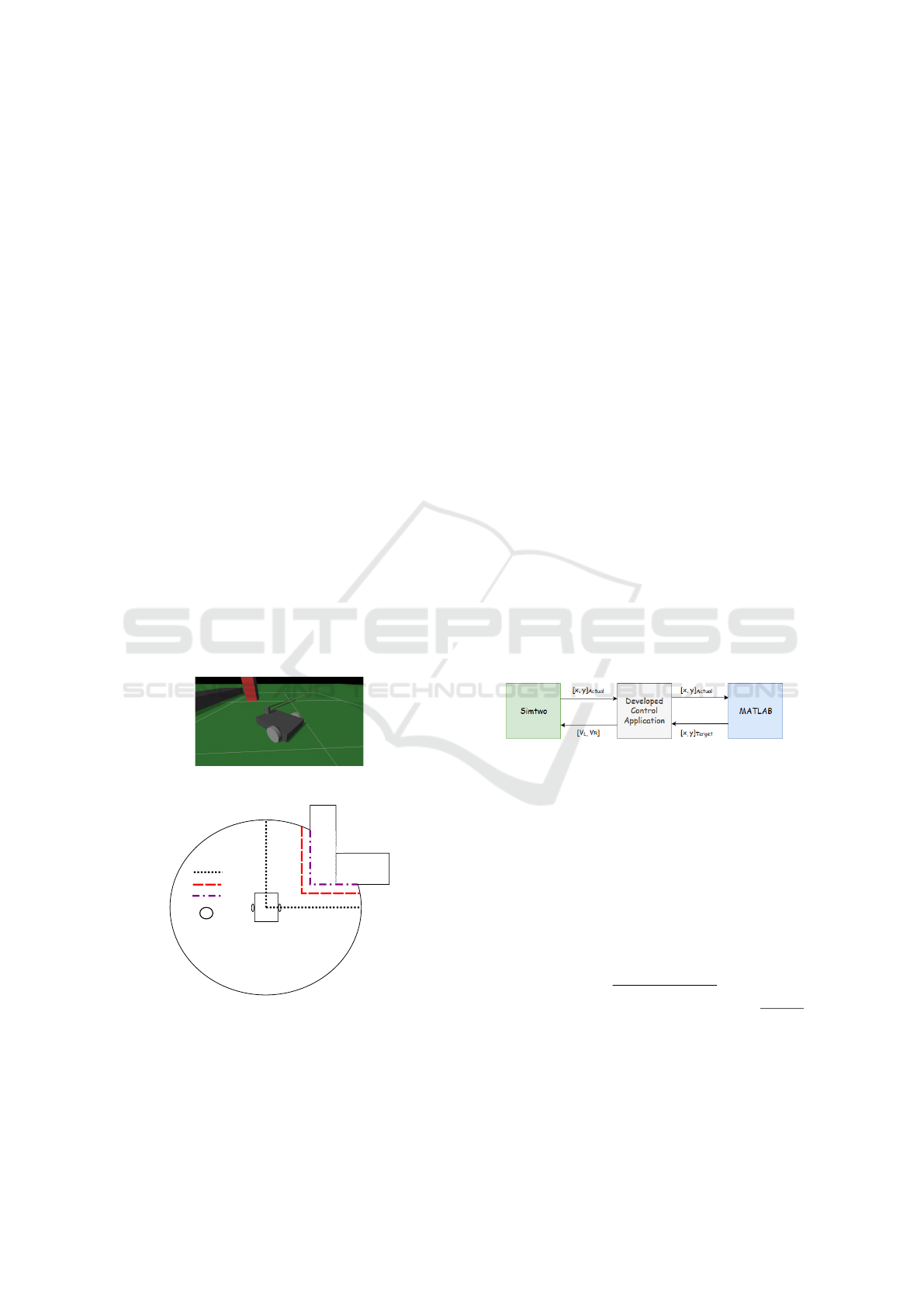
Simulated LIDAR illustrated in Figure 2 covers 360
degrees in azimuth having a density of one light beam
per degree.
Figure 1: Robot Model SimTwo Environment.
Robot's Axes
Safe Distance
Laser Scan
LIDAR Range
Figure 2: LIDAR Structure Illustration.
In Figure 2, the purple dash-dotted line is what the
robot scans, i.e, the obstacles. The red dashed line,
for instance, is a safe threshold distance that the al-
gorithm applies to the detected obstacles to take into
consideration the size of the robot. In this way, it will
not collide when the algorithm generates a path. This
happens, because the algorithms will not consider this
new size as free space. In other words, for the avoid-
ance algorithms, the obstacle has its size increased by
a ∆d, which is the orthogonal distance between the
objects boundary and the red dashed line.
4 METHODOLOGY
The comparison approach will consider the longest
processing time (as the path planning is recalculated
every time a new obstacle is found), the execution
time, and finally, the distance travelled. The first is
simply the longer processing time for the algorithm
to converge to the target point, which was, in this
case study, the first time that the algorithm computed
the trajectory. The second, is the time that the robot
takes to reach the goal. The latter, will be the course
taken by the robot during the test. This distance will
be measured by odometry of the two wheel axes of
the differential geometry as explained in Section 3.2.
Note that the robot’s speed will be the same to all the
tests with both algorithms.
The processing time will be measured in MAT-
LAB where the algorithm codes run. For the execu-
tion time and distance traveled, both of them are mea-
sured in the simulator. Figure 3 illustrates the com-
munication between SimTwo and MATLAB.
Figure 3: System Structure.
The time starts to count when the robot moves and
only stops when it reaches the goal. The criteria to
check if the robot reaches the goal, is a Euclidean dis-
tance between the actual robot’s position and the goal
position. If the distance magnitude is less than 0.1,
then the code consider that the robot reached the goal.
In the same manner, the distance starts to be mea-
sured when the robot starts moving and stops when
the reaches the goal. The simulated encoder has 360
pulses per revolution in each axis. In this sense, the
distance traveled will be an arithmetic mean between
the two axes, Dist =
(Le ftAxis+RightAxis)
2
. In this sense,
the distance performed in each axis is, Axis =
(2×π×r)
360
,
which r is the wheel radius. Note that, Dist will be
measured in mm as the wheel radius will be expressed
in mm as shown in Section 3.
Several scenarios were tested for the algorithms.
In this work, two scenarios are presented. They
are similar, however with small adjustments that will
SIMULTECH 2019 - 9th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
400

change both of the algorithm optimal paths. In the
first scenario, the robot will start in the middle of the
map and its objective is to reach the red cuboid behind
the several obstacles in the northeast part of Figure 4.
It is clear that in Figure 4, the only possible path to the
other side of the walls in by the narrow gap between
the two walls in the southeast part of the Figure 4. It
is possible to assume that when the code starts to run,
the robot using a simulated LIDAR sensor described
in Section 3 sees only this gap.
Figure 4: First scenario test in SimTwo Environment.
In the second scenario, small adjustments were
made to force the algorithms to try out different ap-
proaches. As can be seen in Figure 5, when the sim-
ulation starts to run, the robot can not conclude that
the gap in the southeast part of the map is the only
possible path. In this way, it chooses the upper path
because it is shorter than the lower path. The robot
does not know if behind the upper walls in Figure 5
the path will be blocked. The explanation for each
algorithm for why it chooses the upper path will be
explained in their respective Sections 4.1 and 4.2.
Figure 5: Second scenario test in SimTwo environment.
As RRT* algorithm is a stochastic process, 10
tests were made for each scenario. This decision was
made not only because of the non-deterministic be-
haviour of the RRT* but also because in this way,
computing the mean and standard deviation, the com-
parison will be more reliable.
For A* algorithm in each scenario, the optimal
path will be the same in all tests. In this sense, the re-
sult figures of only one test will be presented for each
scenario. As for the non-deterministic behaviour of
RRT*, figures of two tests will be presented for the
first and second scenarios.
4.1 A* Algorithm
The A* algorithm is one the most popular technique
used in path finding graph traversals. It takes best
of well-known Dijkstra’s and Best-First-Search algo-
rithms into account. For Dijkstra, it takes the part
that it favors the vertices closest to the starting point.
On the other hand, for Best-First-Search, it takes the
heuristics (favoring the cells that are closest to the
goal). The algorithm works by choosing a node ac-
cording to an f value, which is a cost value. This
value is a sum of the values g and h, f = g +h. In this
manner, at each step, it picks the node with the lowest
f , i.e, lowest cost.
The g value is the cost to move from the starting
point to another cell on the grid, according to the path
computed reach there. In the other hand, the h value
is an heuristic value, i.e, an estimated cost to move
from the node that you want to reach and the goal
destination node. This is called an ”educated guess”.
There are several ways to compute the h value and in
this work we used the euclidean distance.
The A* uses open and closed lists just like Dijk-
stra’s algorithm. The open set is a list of nodes that
are to be explored and the closed set is a list of nodes
already explored. In this way, as briefly mentioned
above, at each step the node with the lowest f is re-
moved from the open set and the f and g values of its
neighbors are updated accordingly, and these neigh-
bors are added to the open set. The node removed
from the open set, is added to the closed set. The stop
criteria to the algorithm is when the open set is empty
or the goal node has an f value lower than any node
in the open set. After this, the cost of the goal node
is the lowest one. In this sense, to get the sequence
of movements from the starting point to the goal, A*
algorithm keeps track of the predecessor node called
parent node. So, the sequence is just listing every par-
ent node from the goal node until the start node. The
size of the A* cells considered are 1 m
2
. This choice
was made to match our simulation cells.
4.2 RRT* Algorithm
Rapidly Random Tree generates a tree by generating
random nodes in the free space. It starts from the start
node and expands until it reaches the target position
(node). At each iteration the tree expands by gener-
ating a new random node. If this node is not inside a
region that is considered an obstacle, then the nearest
node from the tree is searched. If this random node is
reached from the nearest node taking into considera-
tion the maximum step size, then the node is added to
the tree. Otherwise, it returns a new node by using a
A Comparison of A* and RRT* Algorithms with Dynamic and Real Time Constraint Scenarios for Mobile Robots
401
steering function, thus expanding the tree by connect-
ing the new node with the nearest node (Noreen et al.,
2016). Collision checks are performed every itera-
tion to ensure free connection between the new node
and the nearest node. RRT* for instance, works the
same way as RRT. However, it introduces two promis-
ing features called near neighbor search and rewiring
tree operations (Noreen et al., 2016). The first feature
finds the best parent node for the new node consid-
ering a circle of radius r. It checks inside this circle
the parent node with the lowest cost before inserting
the three. It connects the lowest cost neighbor to the
new node. The latter feature, however, rewires the
tree inside of the same circle to maintain the tree with
minimal cost paths. In this work a maximum step size
of one meter per convenience is used.
5 RESULTS
Two scenarios were tested with ten tests each for each
algorithm. All configurations were also applied for
both, that is, all the physical characteristics of the en-
vironment and the sensors were applied in SimTwo
simulator to obtain the performance of A* and RRT*.
In this section, the results are presented and com-
pared.
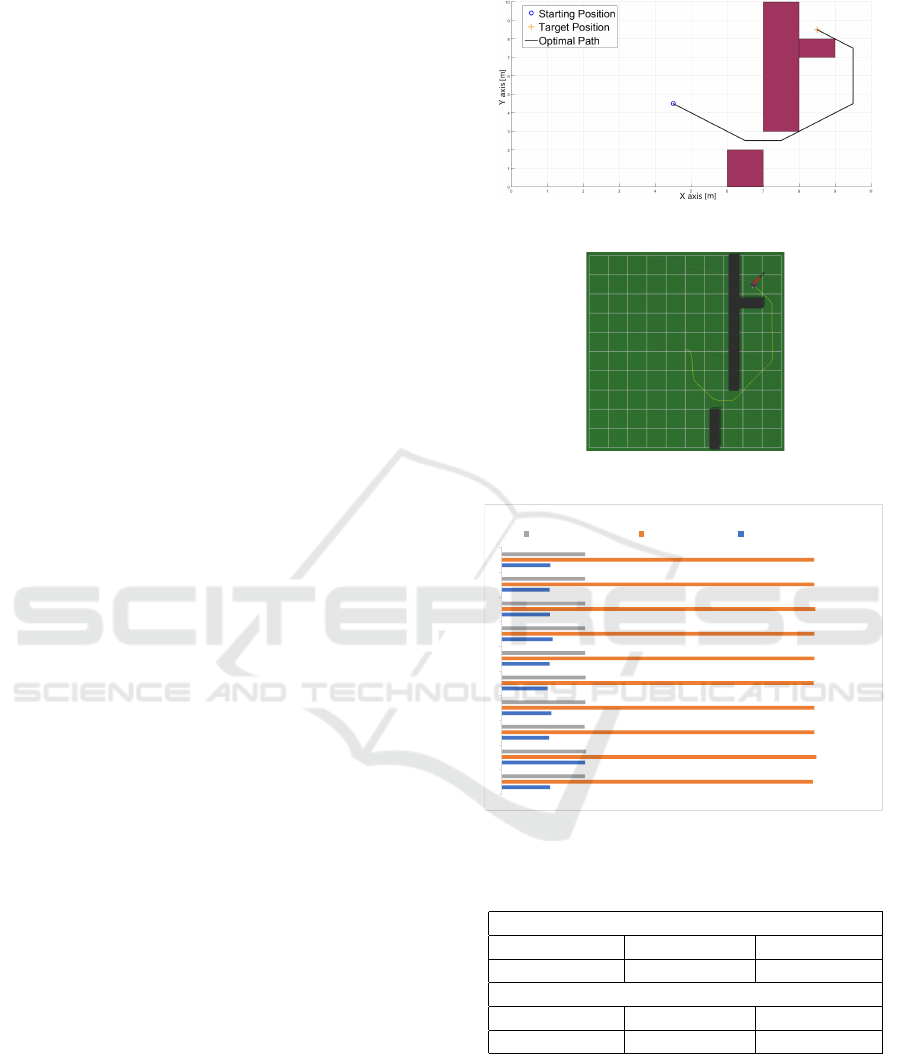
5.1 First Scenario
The first scenario deals with the movement of the
robot starting from the center of the map, where the
end point is placed in the upper right corner, repre-
sented by the red cuboid. The A* algorithm is ex-
pected to calculate the trajectory, bypassing the ob-
stacles. Figure 6 illustrates the whole scenario with
the trajectory found.
As already mentioned, with the trajectory created,
the system sends the robot to reach the end point. Fig-
ure 7 shows the path traveled by the robot avoiding the
obstacles created in the SimTwo environment. The
entire analysis process in A* was repeated ten times
assuming that for each test, the system was restarted.
Then the data were collected and inserted in table for-
mat. Figure 8 reports the computation time, execution
time and distance traveled that the robot spent to per-
form the route with A* algorithm.
As can be noted, A* performs roughly the same
results in all ten tests, performing similar runs in each
test. The averages and standard deviations were com-
puted and Table 1 show all the data obtained in this
series of tests.
Figure 6: Illustration of path planned by A*.
Figure 7: Path performed by the robot in the first scenario.
6.60
11.38
6.45
6.77
6.25
6.52
6.95
6.57
6.54
6.64
42.41
42.86
42.61
42.61
42.50
42.61
42.61
42.75
42.59
42.55
11.32
11.51
11.30
11.41
11.42
11.37
11.38
11.38
11.36
11.36
0.00 5.00 10.00 15.00 20.00 25.00 30.00 35.00 40.00 45.00 50.00
1
2
3
4
5
6
7
8
9
10
First scene in first test of A*
Distance traveled [m] Executing time [s] Processing time [ms/10]
Figure 8: Processing time, executing time and distance trav-
eled in first scenario of A*.
Table 1: First Scenario A* Results.
Averages
Processing (s) Executing (s) Distance (m)
0.0706 42.6095 11.3805
Standard Deviations
Processing (s) Executing (s) Distance (m)
0.0144 0.1183 0.0554
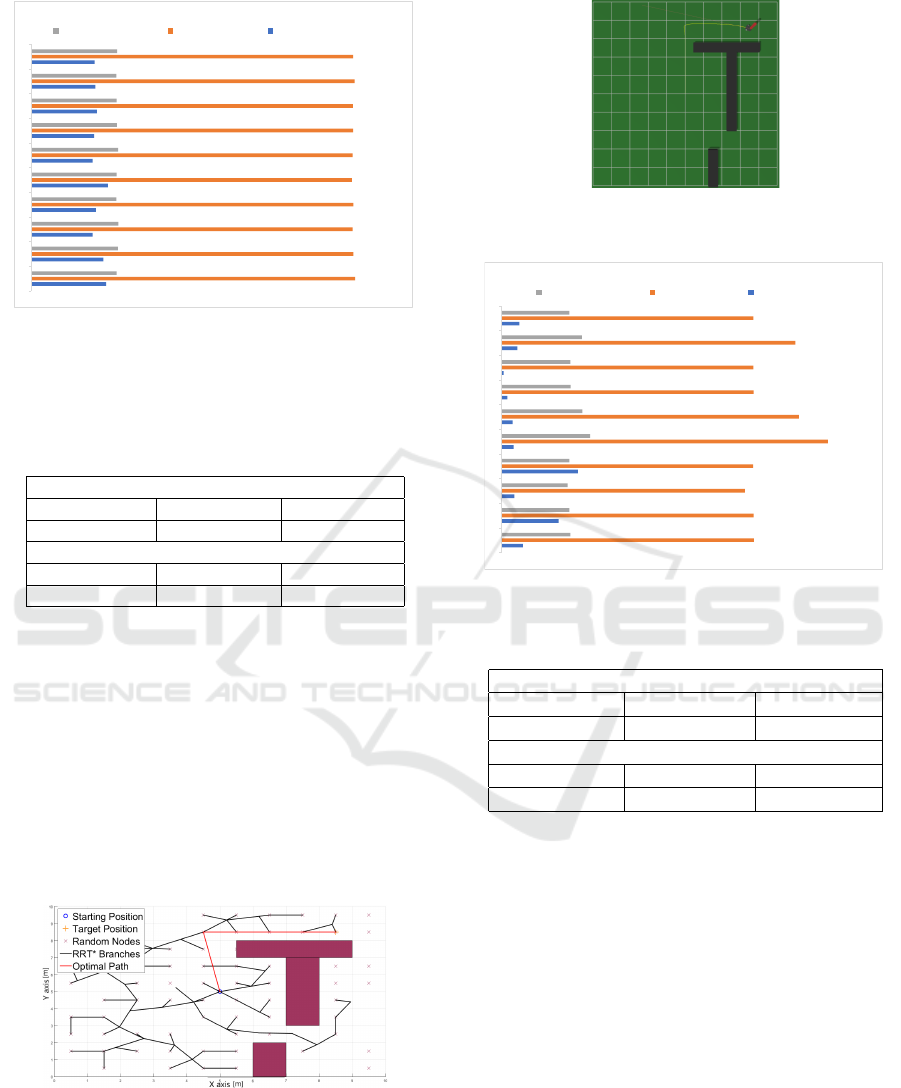
As in the previous series of tests, they were ap-
plied for RRT* algorithm. Figure 9 shows the tra-
jectory found to reach the target. After the trajectory
found by the RRT*, the developed system can already
send the information to the virtual robot. The environ-
ment of this approach can be seen in Figure 10.
All the analysis processed in RRT* was also re-
peated ten times considering that, for each test, the
SIMULTECH 2019 - 9th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
402

Figure 9: Illustration of path planned by RRT* in the first
test.
Figure 10: Path performed by robot in the first test.
system is also restarted. The data from the ten tests
are also in table format. Figure 11 shows the longest
computation time, executing time and distance trav-
eled that the robot took to perform the route with
RRT* algorithm.
13.47
9.95
10.51
6.13
6.73
25.66
15.73
26.13
9.86
10.54
48.67
43.53
49.55
58.53
46.11
52.72
48.39
46.74
43.66
49.63
13.23
11.80
13.59
15.97
12.57
14.27
13.18
12.56
11.74
13.50
0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00
1
2
3
4
5
6
7
8
9
10
First test in first scene of RRT*
Distance traveled [m] Executing time [s] Processing time [s]
Figure 11: Processing time, executing time and distance
traveled in first scenario of RRT*.
Differently from A*, RRT* presents susceptible
differences in these tests, confirming as mentioned
above. Computing the average and standard devia-
tion is possible to conclude that the path quality de-
pends heavily with more processing time, i.e, more
generated nodes. All these values are demonstrated in
Table 2.
Table 2: First Scenario RRT* Results.
Averages
Processing (s) Executing (s) Distance (m)
13.4712 48.7516 13.2409
Standard Deviations
Processing (s) Executing (s) Distance (m)
6.7515 4.2092 1.1815
5.2 Second Scenario
For the analysis of the second scenario, the initial
point of the robot is also the center of the map and
the target point is in the upper right corner. However,
in this analysis one of the obstacles has been opened
up. In this way, it is expected that the algorithms have
performances different from those obtained in the first
scenario. Figure 12 shows the route found by A* for
this scenario and the movements of the virtual robot
in SimTwo, can be seen in Figure 13.
Figure 12: Illustration of path planned by A* in the second
scenario.
The paths generated by A* in Figure 12 and Fig-
ure 6 were different and this is expected due to the dif-
ference of the complexity of the scenarios. As in the
first scenario, the tests were also repeated ten times
and for each time the system was also restarted. The
data of all of these tests are provided in table for-
mat. The processing time, execution time and dis-
tance traveled that the robot consumed to perform the
route with A* algorithm for this scenario is shown in
Figure 14.
Figure 13: Path performed by robot in the second scenario.
The averages and standard deviations are lower
than the first scenario and this is expected since this
A Comparison of A* and RRT* Algorithms with Dynamic and Real Time Constraint Scenarios for Mobile Robots
403
6.13
5.90
5.03
5.29
6.28
5.04
5.16
5.39
5.27
5.20
26.48
26.34
26.28
26.34
26.22
26.28
26.33
26.31
26.44
26.33
7.00
7.10
7.13
6.97
7.00
7.12
7.02
6.99
6.98
7.03
0.00 5.00 10.00 15.00 20.00 25.00 30.00
1
2
3
4
5
6
7
8
9
10
First scene in second test of A*
Distance traveled [m] Executing time [s] Processing time [ms/10]
Figure 14: Processing time, executing time and distance
traveled in second scenario of A*.
scenario is less complex. The data are displayed in
Table 3.
Table 3: Second Scenario A* Results.
Averages
Processing (s) Executing (s) Distance (m)
0.0546 26.3355 7.0354
Standard Deviations
Processing (s) Executing (s) Distance (m)
0.0043 0.0724 0.0585
In this second scenario, the same test is also car-
ried out for RRT* performance analysis. Figure 15
indicates the route calculated by the RRT * algorithm.
The virtual robot movement in the simulated environ-
ment SimTwo is shown in Figure 16.
All the paths are similar as the distance to reach
the goal is considerably lower than scenario one and,
because of that, the algorithm converge much more
faster, generating similar paths. The results are pre-
sented below. Figure 17 shows the processing time,
execution time and distance traveled of the robot by
performance with RRT*.
Figure 15: Illustration of path planned by RRT* in the sec-
ond scenario during test one.
The averages and standard deviations are mea-
sured and Table 4 reports them. Again, the values are
lower due to the complexity of the scenario.
Figure 16: Path performed by robot in the second scenario
during test one.
2.30
6.19
1.39
8.31
1.31
1.19
0.62
0.22
1.70
1.93
27.48
27.45
26.50
27.41
35.55
32.38
27.45
27.44
32.02
27.44
7.50
7.37
7.20
7.38
9.65
8.78
7.50
7.50
8.74
7.38
0.00 5.00 10.00 15.00 20.00 25.00 30.00 35.00 40.00
1
2
3
4
5
6
7
8
9
10
Second test in second scene of RRT*
Distance traveled [m] Executing time [s] Processing time [s]
Figure 17: Processing time, executing time and distance
traveled in second scenario of RRT*.
Table 4: Second Scenario RRT* Results.
Averages
Processing (s) Executing (s) Distance (m)
2.5156 29.111 7.8997
Standard Deviations
Processing (s) Executing (s) Distance (m)
2.4799 2.8979 0.7949
6 CONCLUSION AND FUTURE
WORK
This paper addressed the comparison of performance
for two path planning algorithms considering the
physical influences of the environment with a mobile
robot. For the first scenario, RRT* performed worse
in all tests. Processing roughly 190 times slower
than A*. As for execution time, both performed sim-
ilar, RRT* a slightly slower, 14.41%. In relation
to the distance traveled, both performed similarly as
well. RRT* generating a slightly longer path than A*,
16.34%.
For the second scenario, RRT* performed worse
in all tests. Regarding processing time, it performed
45 times slower than A*. For execution time, RRT*
SIMULTECH 2019 - 9th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
404

performed 10.54% slower than A*. Finally for dis-
tance traveled, RRT* performed 12.28% slower than
A*. For both scenarios regarding the standard devia-
tion, it is concluded that, as the complexity of the en-
vironment increases the standard deviation increases
for both algorithms. However, as RRT* has non-
deterministic behaviour, it increases by a higher order
of magnitude than A*. In addition, if the cell size for
A* was reduced, i.e, the map resolution increases, the
memory and processing time required would increase
exponentially.
For future work tests with both algorithms will be
implemented in a real scenario.
ACKNOWLEDGEMENTS
This work is financed by the ERDF – European
Regional Development Fund through the Opera-
tional Programme for Competitiveness and Interna-
tionalisation - COMPETE 2020 Programme within
project POCI-01-0145-FEDER-006961, and by Na-
tional Funds through the FCT – Fundac¸
˜
ao para
a Ci
ˆ
encia e a Tecnologia (Portuguese Foundation
for Science and Technology) as part of project
UID/EEA/50014/2013.
REFERENCES
Bohlin, R. and Kavraki, L. E. (2000). Path planning us-
ing lazy prm. In Proc. ICRA. Millennium Conf. IEEE
Inter. Conf. on Robotics and Automation. Symposia
Proc., volume 1, pages 521–528. IEEE.
Brito, T., Lima, J., Costa, P., and Piardi, L. (2017). Dy-
namic collision avoidance system for a manipulator
based on rgb-d data. In Iberian Robotics conference,
pages 643–654. Springer.
Cheng, Y. and Wang, G. Y. (2018). Mobile robot navigation
based on lidar. In 2018 Chinese Control And Decision
Conference (CCDC), pages 1243–1246. IEEE.
Choset, H. M., Hutchinson, S., Lynch, K. M., Kantor, G.,
Burgard, W., Kavraki, L. E., and Thrun, S. (2005).
Principles of robot motion: theory, algorithms, and
implementation. MIT press.
Ducho
ˇ
n, F., Babinec, A., Kajan, M., Be
ˇ
no, P., Florek, M.,
Fico, T., and Juri
ˇ
sica, L. (2014). Path planning with
modified a star algorithm for a mobile robot. Procedia
Engineering, 96:59–69.
He, D.-Q., Wang, H.-B., and Li, P.-F. (2018). Robot
path planning using improved rapidly-exploring ran-
dom tree algorithm. In 2018 IEEE Industrial Cyber-
Physical Systems (ICPS), pages 181–186. IEEE.
Kavraki, L., Svestka, P., and Overmars, M. H. (1994).
Probabilistic roadmaps for path planning in high-
dimensional configuration spaces, volume 1994. Un-
known Publisher.
Lima, J. and Costa, P. (2017). Ultra-wideband time of flight
based localization system and odometry fusion for a
scanning 3 dof magnetic field autonomous robot. In
Iberian Robotics conf., pages 879–890. Springer.
Lima, J., Gonc¸alves, J., and Costa, P. J. (2015). Modeling of
a low cost laser scanner sensor. In CONTROLO’2014–
Proceedings of the 11th Portuguese Conference on
Automatic Control, pages 697–705. Springer.
Loong, W. Y., Long, L. Z., and Hun, L. C. (2011). A star
path following mobile robot. In 2011 4th Inter. conf.
on mechatronics (ICOM), pages 1–7. IEEE.
Moon, C.-b. and Chung, W. (2015). Kinodynamic planner
dual-tree rrt (dt-rrt) for two-wheeled mobile robots us-
ing the rapidly exploring random tree. IEEE Trans. on
indust. electro., 62:1080–1090.
Noreen, I., Khan, A., and Habib, Z. (2016). A comparison
of rrt, rrt* and rrt*-smart path planning algorithms.
Inter. Jrnl. of Comp. Sci. and Net. Sec., 16(10):20.
Okubo, Y., Ye, C., and Borenstein, J. (2009). Characteriza-
tion of the hokuyo urg-04lx laser rangefinder for mo-
bile robot obstacle negotiation. In Unmanned Systems
Technology XI, volume 7332, page 733212. Inter. Soc.
for Opt. and Phot.
Piardi, L., Lima, J., and Costa, P. (2018). Development of
a ground truth localization system for wheeled mobile
robots in indoor environments based on laser range-
finder for low-cost systems. In Proc. of 15th In-
ter. Conf. on Informatics in Control, Automation and
Robotics-ICINCO’18, pages 341–348. SciTePress.
Plaku, E., Bekris, K. E., Chen, B. Y., Ladd, A. M., and
Kavraki, L. E. (2005). Sampling-based roadmap of
trees for parallel motion planning. IEEE Transactions
on Robotics, 21(4):597–608.
Schwartz, J. T. and Sharir, M. (1983). On the “piano
movers” problem. ii. general techniques for comput-
ing topological properties of real algebraic manifolds.
Adv. in applied Mathematics, 4:298–351.
Ye, C. and Borenstein, J. (2002). Characterization of a 2d
laser scanner for mobile robot obstacle negotiation. In
Proc. IEEE Inter. Conf. on Robotics and Automation,
volume 3, pages 2512–2518. IEEE.
A Comparison of A* and RRT* Algorithms with Dynamic and Real Time Constraint Scenarios for Mobile Robots
405
