
XAI: A Middleware for Scalable AI
Abdallah Salama, Alexander Linke, Igor Pessoa Rocha and Carsten Binnig
Data Management Lab, TU Darmstadt, Germany
Keywords:
Distributed Deep Learning, Machine Learning, Cloud Computing, Scalability.
Abstract:
A major obstacle for the adoption of deep neural networks (DNNs) is that the training can take multiple
hours or days even with modern GPUs. In order to speed-up training of modern DNNs, recent deep learning
frameworks support the distribution of the training process across multiple machines in a cluster of nodes.
However, even if existing well-established models such as AlexNet or GoogleNet are being used, it is still a
challenging task for data scientists to scale-out distributed deep learning in their environments and on their
hardware resources. In this paper, we present XAI, a middleware on top of existing deep learning frameworks
such as MXNet and Tensorflow to easily scale-out distributed training of DNNs. The aim of XAI is that data
scientists can use a simple interface to specify the model that needs to be trained and the resources available
(e.g., number of machines, number of GPUs per machine, etc.). At the core of XAI, we have implemented a
distributed optimizer that takes the model and the available cluster resources as input and finds a distributed
setup of the training for the given model that best leverages the available resources. Our experiments show
that XAI converges to a desired training accuracy 2x to 5x faster than default distribution setups in MXNet and
TensorFlow.
1 INTRODUCTION
Motivation: Deep Neural Networks (DNNs) have re-
cently seen a significant adoption and are today driv-
ing the adoption of Machine Learning (ML) and Ar-
tificial Intelligence (AI) across a wide range of ap-
plication domains. The expressiveness of DNNs pro-
vides accurate solutions for many complex tasks such
as speech recognition, machine translation or image
understanding previously thought to be unsolvable by
machines, simply by observing large amounts of data.
A major obstacle for the adoption of DNNs, however,
is that the training of deep networks can take multiple
hours or days even with modern GPUs. Furthermore,
sizes of datasets and complexity of DNNs continu-
ously grow to solve even more complex tasks with
higher accuracy. This has the effect that the computa-
tional intensity and memory demands of deep learn-
ing increase further.
In order to speed-up training of modern DNNs on
large data sets, most of the deep learning frameworks
(such as Tensorflow (Abadi et al., 2016), MXNet
(Apache MXNet, 2018), or CNTK (Microsoft CNTK,
2018)) support the distribution of the training process
across multiple machines in a cluster of nodes. How-
ever, even if existing well-established models (such
as AlexNet, GoogleNet, or ResNet) are being used it
is still a challenging task for data scientists to imple-
ment scale-out distributed deep learning in their envi-
ronments.
The main reason is that data scientists must de-
cide on a multitude of low-level details (e.g., select-
ing how many parameter servers to use amongst many
other parameters) in order to distribute the training,
which have an effect on the overall scalability of
training DNNs. This often leads to a long and te-
dious trial-and-error process before the desired per-
formance advantages of distributing the training ac-
tually materialize (if at all). According to our own
experiences when using Tensorflow and MXNet as
well as based on discussions with other users of these
frameworks and experience reports (Sergeev and Del
Balso, 2018; O’Reilly Podcast, 2018), setting up a
distributed learning process for a new model architec-
ture can take days or weeks even for machine learning
experts.
Furthermore, there are many aspects, which make
the situation even worse. One major aspect is that the
trial-and-error procedure of finding an optimal setup
for scalable distributed training has to be repeated
over and over not only for every new model archi-
tecture but also when a new generation of hardware
(GPU, network, etc.) or even if a software version be-
comes available due to missing higher-level abstrac-
tions in those frameworks. This additionally turns the
maintenance of model training at scale into a tech-
nical debt that needs to be payed constantly (Sculley
et al., 2015).
Salama, A., Linke, A., Rocha, I. and Binnig, C.
XAI: A Middleware for Scalable AI.
DOI: 10.5220/0008120301090120
In Proceedings of the 8th International Conference on Data Science, Technology and Applications (DATA 2019), pages 109-120
ISBN: 978-989-758-377-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
109
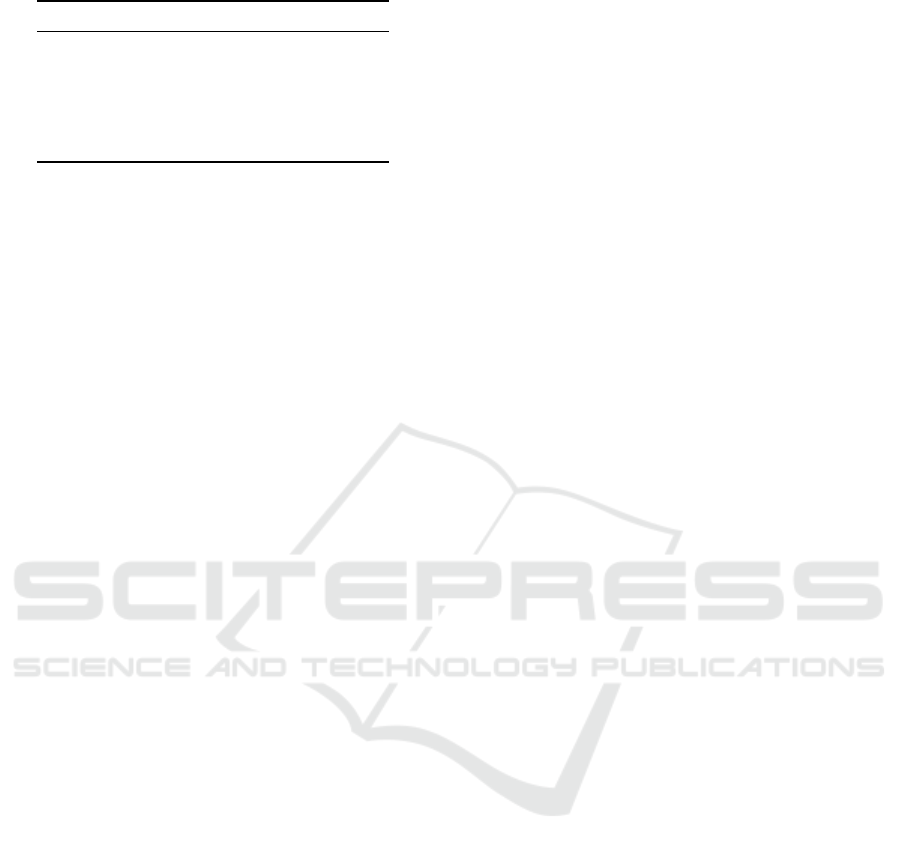
Table 1: Popular Deep Neural Networks.
NETWORK # PARAMETERS DEPTH YEAR
ALEXNET 62,378,344 8 2012
VGG16 138,357,544 16 2014
GOOGLENET 6,797,700 22 2014
RESNET-50 25,636,712 50 2015
RESNET-152 60,344,232 152 2015
INCEPTION V3 23,851,784 159 2015
Contribution: In this paper, we present XAI, a mid-
dleware on top of existing deep learning frameworks
that enables data scientists to easily scale-out dis-
tributed training of DNNs. The aim of XAI is that
data scientists can use a simple interface to specify
the model that needs to be trained as well as the re-
sources available (e.g., number of machines, number
of GPUs per machine, etc.). Based on this input, XAI
automatically deploys the model on the available re-
sources in an optimal manner.
In order to enable scalable deep learning, XAI
comes with different components. At the core of
XAI, we have implemented a distributed optimizer
that takes the model and data as input and finds an op-
timal configuration of the distributed training proce-
dure that maximizes throughput of the training proce-
dure for a given set of hyper-parameters (e.g., batch-
size and learning rate). In addition to the optimizer,
XAI comes with two more components: First, XAI
implements a component which automates the de-
ployment of the model based on the distribution pa-
rameters (e.g., number of parameter servers) deter-
mined by the optimizer. Currently, we have imple-
mented adapters to support Apache MXNet and Ten-
sorFlow as recent deep learning platforms and Ku-
bernetes and Slurm that are today being used typi-
cally in Cloud-based and HPC-based clusters. Sec-
ond, XAI additionally implements an adaptive execu-
tor component which not only monitors the available
resources (CPUs, GPUs, and network utilization) but
also adaptively changes the deployment if over- or
under-utilization of resources is detected.
In summary, we make the following contributions
in this paper: (1) We present XAI, a novel middleware
to simplify scalable distributed training that we plan
to open-source mid 2019. (2) We discuss the design
of a distributed optimizer which is a core component
of XAI to automatically find an optimal deployment
strategy for a given model and available resources. (3)
We show in an extensive evaluation, that XAI can be
used to train different DNN architectures at scale and
support various possible deployments including dif-
ferent deep learning platforms, different cluster envi-
ronments, as well as different hardware generations
without hard-coding a new cost model for each new
setup.
Outline: The remainder of this paper is structured
as follows. Section 2 first discusses the background
of distributed deep learning. Section 3 then gives an
overview of the architecture of XAI before we then
explain the details of the different components in Sec-
tions 4 to 6. The evaluation, in Section 7, shows the
result of using XAI to scale-out deep learning using a
variety of different workloads. Finally, we conclude
with an overview of the related work in Section 8 and
a summary of the findings and possible avenues of fu-
ture work in Section 9.
2 DEEP LEARNING
In this section, we give a brief overview of deep neural
networks (DNNs) and how typically distributed train-
ing works for DNNs.
2.1 Deep Neural Networks
DNNs represent a class of machine learning models
that has been rapidly evolving over the last couple of
years and have shown to be applicable to a wide area
of domains like image classification, object detec-
tion, speech recognition or machine translation. The
first approaches of simple neural networks, so called
feed-forward networks, were already published in the
1950’s (Rosenblatt, 1958) However, the accuracy of
those models was worse than classical machine learn-
ing methods (Minsky and Papert, 1969).
With increasing computational power and larger
datasets it was possible to train deeper neural net-
works (Hinton and Salakhutdinov, 2006) and outper-
form classical machine learning algorithms. One of
the first breakthroughs was the accomplishment of
(Krizhevsky et al., 2012) with a neural network con-
taining eight layers. This Neural Network, so called
AlexNet, excelled at the ImageNet competition (Deng
et al., 2009) and achieved the highest accuracy un-
til then (Krizhevsky et al., 2012). To exemplify the
growth in complexity of DNNs in the last years, Ta-
ble 1 shows a selection of popular neural networks for
image classification with their number of layers and
parameters.
2.2 Distributed Training
While the computational power and capacity of mod-
ern GPUs has been continuously growing (Ben-Nun
and Hoefler, 2018), recent frameworks additionally
DATA 2019 - 8th International Conference on Data Science, Technology and Applications
110

support distributed training of DNNs to leverage the
capacity of GPUs across multiple machines.
Distributing the workload across multiple nodes,
however, involves splitting the training procedure
across multiple machines, which typically comes in
two forms for DNNs (Campos et al., 2017): First,
model-parallelism splits the model across machines
(e.g., based on its layers) and every node trains a part
of the model with the full dataset. Second, with data-
parallelism the datasets are split across workers and
every worker trains the full model but only using a
part of the data. While recent deep learning frame-
works support both schemes, this paper focuses on
data-parallelism, which has seen wider adoption in
practice than model-parallelism.
For data-parallelism, typically a centralized pa-
rameter server infrastructure is used to synchronize
the model across multiple machines (Dean et al.,
2012). The idea is that each worker node sends the
model parameters to the centralized parameters server
infrastructure, which merges the updates from differ-
ent workers and sends back the updated parameters
to the workers for the next mini-batch which is being
trained. To avoid that the centralized parameter server
infrastructure becomes a bottleneck, the parameters
can be sharded across multiple parameter servers.
A major challenge when using a centralized pa-
rameter server infrastructure for distributed training
is to balance computation and communication to best
leverage all resources (e.g., GPUs and the available
network) and enable scalability when more workers
with additional GPUs are being added. Deep learn-
ing frameworks therefore come with a variety of pa-
rameters that influence the ratio of computation and
communication such as model consistency (i.e., asyn-
chronous or synchronous updates (Jin et al., 2016)),
mini-batch size, but also the number of parameter
servers being used to shard the update load. If these
parameters are not chosen carefully, the overall scal-
ability is limited as we will show in our experimental
evaluation in Seciton 7.
3 SYSTEM OVERVIEW
XAI is built as a middleware on top of existing ma-
chine learning frameworks such as Apache MXNet
and TensorFlow. The purpose of XAI is to facilitate
the process of running deep learning training by in-
troducing a high-level interface, which hides the com-
plexity of deploying a DNN in a distributed manner.
Figure 1 shows the system architecture of XAI. In the
following, we briefly discuss each component.
Job Monitor
Python
Library
Job Submission
Distributed
Optimizer
Hyper-
Parameter
Selection
Hyperparameter
Metadata
…
Distribution-
Parameter
Selection
Adaptive
Executer
Resource
Monitor
Script Generator
Re-
Configuration
Workers Parameter Servers
Automatic
Deployment
Cluster
Environment
Scripts
Distributor
Execution
Delegator
Model and Data
Results / Resource Utilization
Train
Model
Model, Data, and Configuration Results / Resource Utilization
Runtime Scripts
Configuration
Results / Resource Utilization
Deep Learning Frameworks (Tensorflow, MXNet)
Cluster Manager
(Kubernetes, Slurm)
XAI
Client
XAI
Middleware
Existing
Infastructure
Figure 1: XAI System Architecture.
Client: XAI comes with a thin Python-based inter-
face that initiates the training job where the user only
has to specify the model (e.g., AlexNet), the data set
which is being used for the training procedure, and
the cluster metadata on which the training job will be
executed.
Additionally, the XAI client provides a simple in-
terface for monitoring the training results as well as
the resource utilization (e.g., of GPUs, network) on-
line and visually during training.
Distributed Optimizer: A major component of
XAI is the distributed optimizer that is able to find
an optimal configuration for a given DNN model and
data set (training and test data). An optimal config-
uration consists of the hyper-parameters that maxi-
mize the model accuracy as well as the distribution-
parameters (e.g., number of parameter servers) that
maximize the overall throughput in a distributed
setup. The main challenge to maximize the over-
all throughput is to estimate the network bandwidth
when running the training job in order to derive the
minimum number of parameter servers required to not
slow-down the training procedure. Section 4 explains
the details of the distributed optimizer of XAI.
Automatic Deployment: Given a configuration
from the optimizer, the DNN model is then automat-
ically deployed in a cluster environment. A cluster
environment is defined by the framework (e.g., Ten-
sorflow and MXNet) as well as the cluster manager
(e.g., Kubernetes and Slurm) that should be used for
executing the training job. Based on the configura-
tion and the given cluster environment, the XAI’s au-
tomatic model deployment component generates and
distributes the required training scripts to all nodes
(workers and parameter servers) and then delegates
the training to the available cluster manager (Slurm
or Kubernetes). Section 5 explains the details of the
model deployment of XAI.
XAI: A Middleware for Scalable AI
111

Adaptive Executor: The execution of a distributed
DNN training is monitored by an adaptive executor in
XAI. The purpose of the adaptive executor is to make
the execution more robust towards shared environ-
ments or non-optimal decisions by the optimizer. To
that end, the adaptive executor comes with a monitor-
ing component which continuously analyzes the uti-
lization of resources of all nodes (workers and param-
eter servers). Based on the monitored utilization, the
adaptive executor can change a running training job
by check-pointing the results of the last mini-batch
and continuing the training job with a new modified
configuration (e.g., by increasing the number of pa-
rameter servers). Section 6 explains the details of the
adaptive executor of XAI.
4 DISTRIBUTED OPTIMIZER
In this section, we explain the details of our dis-
tributed optimizer, which is the core component of
XAI.
4.1 Overview of the Optimizer
As shown in the architecture of XAI in Figure 1,
the optimizer performs three steps that are executed
iteratively to explore the search space: (1) hyper-
parameter selection, (2) distribution-parameter selec-
tion, and then (3) model training. The overall aim of
the optimizer is to find a model with high accuracy
with minimal runtime.
The idea behind the iterative search procedure is
that the first step determines a set of hyper-parameters
(e.g., batch size, learning rate, etc.) that should be
used for training the next DNN in the next itera-
tion. In XAI, we currently implement a state-of-
the art approach based on selecting hyper-parameters
(Eggensperger et al., 2013), which is also available
in Auto-sklearn. This approach uses a random-forest-
based Bayesian optimization method SMAC to find
the best instantiation of hyper-parameters. The ap-
proach additionally employs meta-learning to start
Bayesian optimization from good configurations eval-
uated on previous similar datasets and stores the re-
sults in our hyper-parameter Metadatabase. XAI also
uses this database to retrieve hyper-parameters for
next similar training job.
Once a set of hyper-parameters for the next iter-
ation is selected, the second step determines a set of
distribution-parameters to minimize the runtime (i.e.,
maximize the throughput) of the distributed training
procedure. This step, is not considered in the exist-
ing AutoML approaches which typically only focus
on hyper-parameter selection. The main contribution
of our optimization procedure is to combine the exist-
ing AutoML approaches for hyper-parameters selec-
tion with a selection of distribution-parameters which
minimize the runtime of distributed training. The de-
tails about the selection of distribution-parameters are
discussed next in Section 4.2.
Afterwards, once a set of hyper-parameters and
distribution-parameters are determined, the optimizer
trains the given DNN for a pre-defined number of
epochs (using the automatic model deployment and
the adaptive execution component in XAI) and based
on the accuracy results it decides whether or not to
start a next iteration of optimization using the same
procedure as discussed before.
4.2 Distribution-parameter Selection
In the following, we describe our procedure for select-
ing a set of distribution-parameters to minimize the
runtime for a given set of hyper-parameters. In this
paper, we focus on distributed DNN training using
data-parallelism and a centralized parameter server
infrastructure with multiple servers where each hosts
a shard of parameters.
The two main distribution-parameters of interest
in our first version of the optimizer are the number
of parameter servers being used as well as the up-
date strategy to synchronize the parameters between
workers and parameter servers. We picked the pa-
rameter server as a first scheme that we support in
XAI since (a) it is widely used and supported by many
of the current distributed deep learning frameworks,
and (b) parameter servers have shown to be more effi-
cient in wide range of possible deployments where no
dedicated hardware is available (e.g., InfiniBand and
RDMA).
However, in future versions we also plan to
consider other distributed schemes including model-
parallelism as well as other approaches for data-
parallelism to distributed parameters (i.e., using repli-
cation approaches based on MPI to broadcast the pa-
rameters etc.).
When using data-parallelism and a centralized pa-
rameter server infrastructure, the aggregated network
bandwidth available between workers and parameter
servers is an important factor when it comes to scal-
ability. The main idea behind the optimizer is that
for a given number of workers, each having one or
multiple GPUs, we use a cost-model to estimate the
minimal number of parameter servers required to sus-
tain the update load. In order to do so, the opti-
mizer estimates the expected average network band-
width requirements between all workers and the cen-
DATA 2019 - 8th International Conference on Data Science, Technology and Applications
112

tralized parameter server for training a given DNN
architecture. Based on those estimated bandwidth-
requirements the number of parameter servers is de-
termined by simply dividing the required bandwidth
by the bandwidth each parameter server can provide
as we show later in Section 4.2.2.
4.2.1 Cost-model Calibration
Different from optimizers known from databases, the
optimizer in XAI does not use hard-coded cost-models
to estimate these values. Instead, in XAI we rely on
a short calibration phase that determines basic cost
model parameters experimentally. Using a calibra-
tion phase is typically not a problem for distributed
DNN training, since the training phase for one set of
hyper-parameters already takes hours or even days.
Compared to the time required for training, the time
required for the calibration phase is negligible.
The goal of the cost-model calibration is to de-
fine the basic parameters such as the outgoing net-
work load each worker can produce as well as the
incoming network load a parameter server can con-
sume. Furthermore, a second parameter of interest is
the ratio of compute to communication time required
for a given DNN model architecture. This ratio is
an important parameter in our cost-based parameter
selection since it allows us to determine the number
of parameter servers required to minimize the overall
training runtime as we will see in the next subsection.
There are different factors which influence the ra-
tio of compute and communication time. First, hyper-
parameters such as the batch size or learning rate de-
termine the overall update load and thus the trans-
fer time. Second, the GPU and networking hardware
being used in the cluster setup play another impor-
tant role. Thus, calibration needs to be re-executed
when different hyper-parameters or a different hard-
ware setup is being used.
That way, our optimizer can determine an opti-
mal distributed setup for unseen DNN architectures
as well as new hardware generations without the need
of adapting a hard-coded cost models.
In order to find out the ratio of compute and com-
munication time, the cost-Model calibration trains
first the DNN with the given hyper-parameters on one
worker using all available GPUs without using a pa-
rameter server at all (i.e., all training is executed lo-
cally) for only a few mini-batches (i.e., we use 10
mini-batches at the moment to mitigate the effect of
outliers). The calibration phase then monitors the run-
time of the local training and divides it by the number
of batches. The time required to train one batch is
then used as an estimate to represent the total training
Figure 2: Collision Model of our Optimizer.
time including the forward propagation time T
f p
and
the backward propagation time T
bp
.
Afterwards, the same procedure is performed us-
ing distributed setup with one worker and an increas-
ing number of parameter servers. We use our mon-
itoring capabilities of XAI to see when the outgoing
network bandwidth of the worker is saturated. The
purpose of this step is to find the total batch process-
ing time T including the ideal transfer time T
t
if the
network is not a bottleneck. The difference between
the batch processing time with the local training is
used as an estimate for the transfer time to send the
weight updates from one worker over the network to
one parameter server; i.e., T
t
= T − (T
f p
+ T
bp
). Fur-
thermore, based on this step of the calibration phase,
we can also identify the outgoing network bandwidth
load that one worker BW
w
can produce.
Finally, as a last step of the calibration phase, we
run the training in a distributed setup with one pa-
rameter server and an increasing number of workers.
Using our monitoring capabilities, we can thus deter-
mine the maximum network bandwidth BW
ps
that a
parameter server is able to sustain.
4.2.2 Cost-based Parameter Selection
The goal of the cost-based parameter selection is to
find the minimum number of parameter servers re-
quired to cover the network load generated by n work-
ers under different consistency models (asynchronous
and synchronous updates). In our current version,
we use asynchronous updates as a default while XAI
can also be configured to use synchronous training.
However, asynchronous updates have shown to pro-
vide an overall better runtime but might result in a
slower convergence. Modeling the dependency be-
tween throughput and convergence for asynchronous
and synchronous updates is left for future work.
Estimating the number of parameter servers re-
quired for synchronous updates is trivial. If we as-
sume that all workers send and receive data from pa-
rameter servers at the same time, then we can simply
XAI: A Middleware for Scalable AI
113

compute the required number of parameter servers as
n · BW
w
/BW
ps
.
When using asynchronous parameter updates it is
more difficult, since each worker sends its updates
independently. In the ideal case, if the communi-
cation of workers is not overlapping we would only
require BW
w
/BW
ps
parameter servers independent of
the number of workers n being used. However, with
an increasing number of workers the likelihood that
two workers send/read parameters from a centralized
parameter server infrastructure at the same time in-
creases. In the following, we show how we can esti-
mate this likelihood.
If we have n workers and 1 parameter server, the
range of workers which are transferring data at the
same time can in general vary between 1 and n work-
ers. Figure 2 shows the basic idea of our collision
model that we use to estimate the collision likelihood
that m workers (where 1 < m ≤ n) transmit their pa-
rameters at the same time.
As basic input to estimate the likelihood that m out
of n workers collide, we use the following estimates
that we computed as a part of the calibration phase: T
which represents the total time to train a mini-batch
in one worker including the transfer time T
t
. Based
on these parameters, we can compute the probability
P
t
that a worker transfers data as:
P
t
=
T
t
T
(1)
If we look to the workers as being independent,
then the probability that any possible combination of
two workers (
n
2
) in a cluster with n workers are send-
ing data to a parameter server at the same time is de-
fined by the following equation:
P
t
(n) =
n
2
(P
t
)
2
(2)
This formula can be generalized to the probability
P
t
(n,m) that any possible combination of m workers
is sending at the same time.
P
t
(n,m) =
n
m
(P
t
)
m
(3)
To calculate the probability that only one worker
sends data at any point of time during training, we use
equation 4:
P
t
(n,m = 1) = 1 −
n
∑
m=2
n
m
(P
t
)
m
(4)
The purpose of calculating the overall likelihood
of collisions, is to estimate the expected bandwidth
E
BW
that the workers could need to transmit param-
eter updates. The following equation defines how
to compute the expected bandwidth for a number of
workers based on the discussions before:
E
BW
(n) =
n
∑
m=1
m · P
t
(n,m) · BW
w
(5)
After calculating the expected bandwidth E
BW
(n)
for n workers, we can now estimate the number of the
parameters servers PS(n) required for n workers as
follows:
PS(n) =
E
BW
(n)
BW
ps
(6)
In some cases when the transfer time T
t
is dom-
inating the batch processing time T , Equation 6 re-
sults in an overestimate of the parameter servers.
This problem is explained in (Math Pages, 2018),
which discusses the probability of intersecting inter-
vals. Based on their results, our equations above only
hold if T
t
<
T
n−1
. To solve this issue we extended our
cost model to cover this case. However, due to lack
of space and since this is only an exceptional case, we
will add the estimates for this case to an extended ver-
sion of the paper that we plan to publish as technical
report.
In our experiments in Section 7, we show that our
estimate based on Equation 6 results in optimal selec-
tion of parameter servers for an asynchronous model
updates.
5 AUTOMATIC MODEL
DEPLOYMENT
The aim of the automatic model deployment is that a
XAI can deploy the training of a given DNN in dif-
ferent cluster environments. Currently, XAI supports
the automatic deployment of a given DNN model us-
ing Tensorflow or MXNet as DNN frameworks and
Slurm or Kubernetes as cluster scheduler.
In the following, we briefly outline the challenges
and ideas that we addressed when deploying a training
job on Slurm or Kubernetes respectively.
5.1 Deployment using Slurm
A main challenge when executing MXNet or Tensor-
flow in a Slurm-based environment is that resources
(i.e., workers and parameter servers) must be mapped
to physical resources (i.e., nodes) after a training job
is deployed.
This departs from most DNN frameworks, which
require a static assignment of resources before start-
ing a training job. To actually start a distributed train-
ing job in Tensorflow or MXNet it is necessary to
provide the host addressees of the different nodes and
their roles (workers and parameter servers) in a clus-
ter specification.
DATA 2019 - 8th International Conference on Data Science, Technology and Applications
114
When using Slurm, this so called cluster specifi-
cation can only be determined at runtime after the job
is deployed in a cluster. We therefore generate startup
scripts that dynamically create a cluster specification
for each node being selected by Slurm.
5.2 Deployment using Kubernetes
The automatic deployment component also supports
Kubernetes, by automatically generating the proper
YAML-scripts for all the so called pods that will be
created on each node in a cluster. The challenges are
similar to the Slurm environment.
To dynamically deploy workers and parameter
servers, our deployment component automatically
creates internal Kubernetes services for each pod, so
that they can communicate through the pod addresses.
A training job receives at startup a pool of pod ad-
dresses as an argument that identifies which pods are
participating in the training and who is taking over
role of being a parameter server or a worker.
6 ADAPTIVE EXECUTOR
The main component of the adaptive executor is the
resource monitoring component. This component
records important metrics about the hardware perfor-
mance of individual nodes (i.e., workers and parame-
ter servers) to track possible bottlenecks. The identi-
fication of bottlenecks on a high level helps to quickly
investigate the problem more accurately with specific
tools or directly adapt the DNN training deployment
to utilize all resources uniformly.
The currently selected metrics include the CPU
utilization, main memory consumption, in- and out-
going network traffic as well as GPU load and GPU
memory consumption. Even during developing XAI,
the monitoring tool has often helped us to directly
identify if we are running into a network or GPU bot-
tleneck or to detect a skew on the parameter servers.
The monitoring component is implemented as a
python program which runs on one CPU core in par-
allel to the DNN training process, records the given
metrics, and writes them to a log file. The logs from
all nodes are continuously collected, transformed and
analyzed, so that the training can be adapted accord-
ing to the monitoring results and, for instance, scale-
in or scale-out the parameter server infrastructure if
more resources are needed. For manual investigation,
we additionally provide a service for visualizing the
analyzed data using the before-mentioned metrics.
Figure 3: Throughput Analysis for AlexNet and ResNet-50
using TensorFlow on the HPC Cluster with Asynchronous
Training.
7 EXPERIMENTAL EVALUATION
In our experimental evaluation, we have trained neu-
ral networks in a distributed way on different clusters
and deep learning frameworks using various hyper-
and distribution-parameters. To give an overview and
back up the need for a cost-based optimizer in XAI,
the following sections will first illustrate how that dif-
ferent parameters significantly influence the perfor-
mance of the DNN training. Furthermore, we also
show the efficiency of our optimizer to select an op-
timal set of parameters as well as interesting findings
that where eable to derive from using our monitoring
component.
Setup and Workloads: In all our experiments, we
have used the two cluster setups as shown in Table 2.
We have chosen two different setups: one setup on an
HPC-cluster with a fast network connection and one
setup using an AWS-cluster with a slower network
connection. Furthermore, both setups differ also in
the GPU generation being used.
The DNN models we have used for the evalua-
tion are listed in Table 1. These DNNs have been
used over the last years for image classification rep-
resenting different model architectures. We believe
that our findings and cost models can also be general-
ized to other domains using different model architec-
tures (e.g., sequence-to-sequence models for machine
translation). Showing this, however, is part of our fu-
ture work.
Furthermore, in our evaluation we only show the
effects of selecting different parameters on the overall
XAI: A Middleware for Scalable AI
115
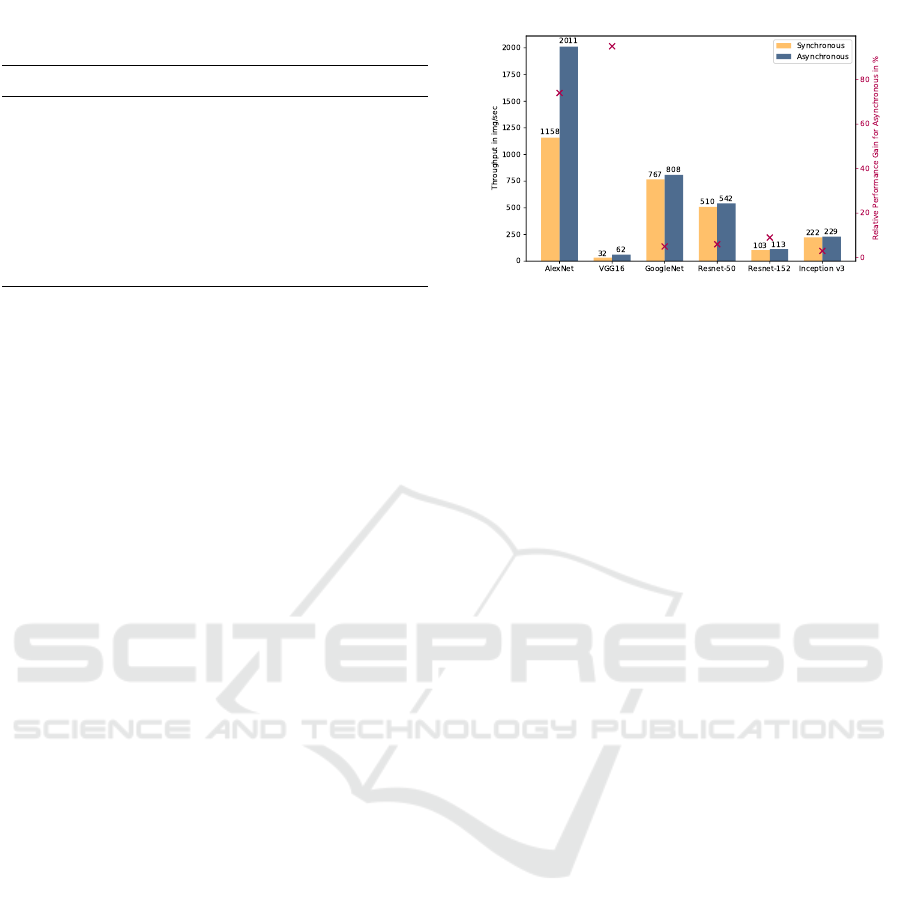
Table 2: Machine Configuration in Different Clusters.
CLUSTER HPC AWS (P2.XLARGE)
CPU 2X XEON E5-2670 4X VCPU
RAM 32 GBYTE 61 GBYTE
BANDWITH 20 GBIT/S 1.3 GBIT/S
GPU 2X TESLA K20X 1X TESLA K80
OS CENTOS 7 UBUNTU 16.02
TENSORFLOW 1.10 1.10
MXNET 1.2.1 N.A.
CUDA 9.0 9.0
CUDNN 7.1.3 7.1.3
throughput and not on the model accuracy. The reason
is that the main contribution of our optimizer is the
cost-based model to find an optimal distributed setup,
which aims to minimize runtime. Consequently, in
all our experiments we also used only synthetic data
sets; i.e., images are represented as in-memory arrays
with random values, to avoid running into bottlenecks
(e.g., I/O limitations of shared file systems) not rele-
vant for our evaluations.
7.1 Exp 1: Throughput Analysis
We have empirically evaluated several hundreds of
distributed setups to show the sensitivity of the train-
ing throughput from different parameters. The results
clearly justify the need for a calibration phase to make
XAI not only independent of the DNN architecture but
also independent of the framework being used as well
as the underlying hardware. In the following sections
we summarize the most important findings.
7.1.1 Different Frameworks
By training DNNs on different frameworks, we saw
a difference in terms of throughput when using dif-
ferent Deep Learning Frameworks like TensorFlow
or MXNet. In Figure 3, the upper plots show how
the training throughput in TensorFlow for training
AlexNet using asynchronous model consistency can
achieve a higher throughput with a lower amount of
parameter servers (PS) than with MXNet. What is
not shown in the plots, is that in synchronous mode,
TensorFlow performs up to 30% worse than MXNet
with a higher number of parameter servers, whereas
TensorFlow still outperforms MXNet with a small
amount of parameter servers.
In the lower two plots of Figure 3, we addition-
ally see that when using another DNN (ResNet-50)
there is no big difference between the two frame-
works. However, the previous observation also ap-
plies here. MXNet needs more parameter servers for
scaling-out. This is indicated by the 1 PS line in
the lower right subplot, which stops increasing at a
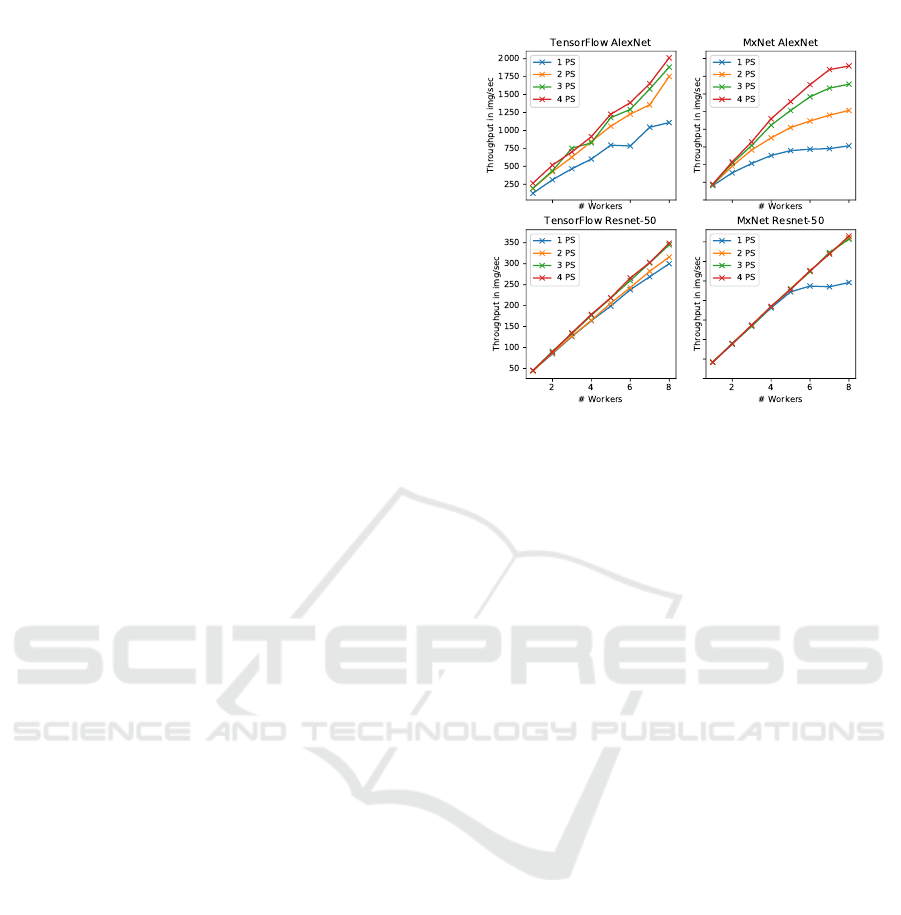
Figure 4: Throughput Analysis in TensorFlow for different
DNNs with 8 Worker and 4 Parameter Servers on the HPC
Cluster.
throughput of around 250 images per second. The
general ability to achieve a better scale-out with fewer
parameter servers in ResNet-50 in both frameworks is
due to a higher computational requirements for train-
ing this DNN. As a result the ratio of communication
to computation shifts to a less network-bound situa-
tion.
7.1.2 Different DNNs
Figure 4 illustrates the throughput difference when
training the different DNNs mentioned in Table 1. It is
noticeable that the difference in throughput is related
to the difference in computational complexity of the
DNNs, which is not the same as the number of param-
eters a DNN has but also depends on the types of lay-
ers used. As a result, for some DNNs with low com-
putational complexity, the throughput is much higher
if a fast network interconnection is being used be-
cause the ratio of computation over communication
shifts and makes the overall training network-bound.
7.1.3 Different Consistency Models
In this experiment, we analyze the effect of differ-
ent consistency models on the overall throughput as
shown in Figure 4. For some DNNs like AlexNet
and VGG16, we can see an high increase for asyn-
chronous over synchronous training of up to 80%,
shown by the red markers in Figure 4. This is caused
by the high amount of parameters of those networks,
while the depth (i.e., number of layers) is compara-
bly low compared to other DNNs. As a result, we can
see that the performance gains of asynchronous train-
ing over synchronous training depend heavily on the
DNN architecture.
7.1.4 Different Batch Sizes
Figure 5 shows that the mini-batch size influences
the throughput during distributed training. The x-axis
DATA 2019 - 8th International Conference on Data Science, Technology and Applications
116
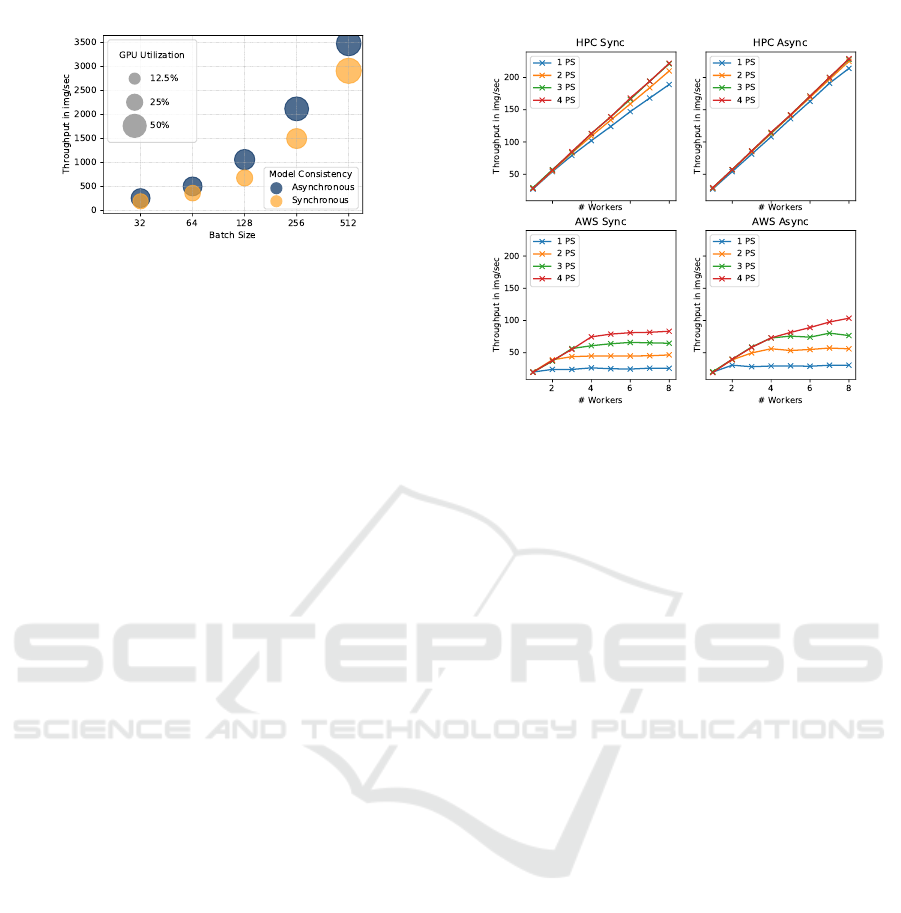
Figure 5: Effect of Batch Size on the Throughput for train-
ing AlexNet with 8 Workers and 1 parameter server on the
HPC Cluster.
shows the batch size for a single worker on a loga-
rithmic scale and the y-axis shows the throughput. In
this experiment, we only show the result of AlexNet.
For this DNN, the throughput scales almost linearly
with an increasing in mini-batch size. What we can
also see is that an increase in mini-batch size leads to
a higher GPU utilization of the workers, since a sin-
gle worker processes more images per batch such that
the ratio between communication over computation
decreases. It is further noticeable that asynchronous
training performs on average 38% better than syn-
chronous training.
7.1.5 Different Cluster Environments
In this experiment, we show the effects of using dif-
ferent cluster setups (HPC vs. AWS). The lower plots
in Figure 6 indicate that the DNN training on AWS
with a comparably slow network connection (see Ta-
ble 2) shows effects of network congestion. The in-
crease of parameter servers for AWS thus helps to
mitigate the congestion to a certain extend and bet-
ter scale out. The DNN training on the HPC cluster
(upper plots in Figure 6) on the other shows a much
better scalability with fewer parameter servers. Only
in the case of synchronous training, we also see that
network becomes a bottleneck when using only one
parameter server for 8 workers. This originates from
network peak requirements in synchronous training,
since all workers send their updates and receive new
parameters (almost) simultaneously.
7.2 Exp 2: Accuracy of Optimizer
The goal of this experiment is to show the accuracy
of our cost model. To show that, we executed the dis-
tributed training procedure with a varying number of
workers where we first manually varied the number of
parameter servers and then compared it to the training
in XAI where our optimizer determined the number
of parameter servers for a given number of workers.
Figure 6: Training of Inception v3 on different Clusters.
The idea is that the optimizer neither under-estimates
nor over-estimates the number of parameter servers
required to sustain the load of the workers.
In the following we show the results when apply-
ing our cost model not only for different DNN mod-
els, but also when using deep learning frameworks
as well as different cluster setups. However, due to
space limitations, we only show the results of the cost
model for asynchronous training, which is also more
challenging to model as explained in Section 4.
Figure 7 shows the result of training ResNet-50
on the HPC and the AWS clusters using TensorFlow.
The goal is to show the accuracy of the cost model
for different clusters using different hardware setups.
The red line shows the result of our cost model where
each point is annotated with the parameter servers that
our model predicted. As we see from the plot, our
cost model predicts the minimal number of parame-
ters servers that allows us to scale-out almost linearly
(i.e., it neither under- nor over-estimates the number
of parameter servers required). For example, for the
plot on the right hand side, we can see that the cost
model suggests to use 5 parameter servers for 4 work-
ers. Using more parameter servers would not increase
the throughput but using less than 5 servers would
significantly decrease the overall throughput. What
is also interesting is that in the HPC cluster (left hand
side), where we have high network bandwidth, the op-
timizer in general recommends a fewer number of pa-
rameters servers compared to training the same DNN
on the AWS cluster (right hand side) where we have
only a slow network.
Figure 8 shows the result of training ResNet-
50 and AlexNet on the HPC cluster using Apache
MXNet. The goal is to show the accuracy of the cost
model for DNNs with a different computational com-
XAI: A Middleware for Scalable AI
117

Figure 7: Accuracy of the Optimizer for Different Clusters.
Figure 8: Accuracy of the Optimizer in Different DNNs.
plexity. In ResNet-50, our optimizer recommends to
use 2 parameters servers if up to 6 workers are be-
ing used. If we look to the throughput for 2 work-
ers, we can easily see that 2 parameters servers is
an optimal choice because using 3 or 4 parameters
servers would not increase the throughput. Moreover,
in AlexNet where the number of model parameters is
higher as for ResNet-50, the likelihood of collisions
(i.e., two workers send/receive their parameters at the
same time) is also higher. Thus, our optimizer selects
to use more parameters servers for the same number
of workers.
7.3 Exp 3: Resource Monitoring
The resource monitoring component provides infor-
mation about several metrics for each node of the
cluster as explained in Section 6. This component is
very helpful to identify unexpected behaviors during
training and helped us to point out potential bottle-
necks.
For instance, Figure 9 shows the monitored net-
work data received for the parameter servers dur-
ing the training of AlexNet when using 4 parame-
ter servers and 5 workers. In the upper plot, we see
that the network utilization for parameter servers (PS)
2 and 3, represented by green and orange lines, are
much higher, while the network utilization for param-
eter servers 1 and 4 is much lower. This information
led us to investigate how the parameters of AlexNet
were distributed among the four parameter servers.
The reason turned out to be skew in the way how
weights where distributed to parameter servers.
Further investigations led us to the following find-
Figure 9: Network Data received by Parameter Servers with
and without Skew.
ings. AlexNet has three fully-connected layers: Two
with 4096 neurons each and one with only 1000 neu-
rons (Krizhevsky et al., 2012). Since each fully-
connected layer is one big operation in the compu-
tation graph, the load balancer of Tensorflow was as-
signing the parameters in a layer-wise manner to pa-
rameter servers. This layer-wise assignment was then
causing the skew on the network and consequently re-
ducing the overall training performance.
To solve the issue, we introduced a new partitioner
for AlexNet to split the layers in equal sized parts
according to the number of parameters servers, thus,
sharding the network load equally across servers. The
results after using our own partitioner for AlexNet can
be seen in the lower plot of Figure 9. As a main re-
sult, we see that the network load is better distributed
across all parameter servers and the overall training
time is thus reduced.
7.4 Exp 4: Effectiveness of XAI
XAI aims to execute a distributed job with highest
throughput that can be obtained out of a cluster set-
tings. This experiment shows the resulting effective-
ness of XAI by picking the optimal distribution strat-
egy and thus converging to a comparable accuracy 2x
faster than a default configuration. Figure 10 shows
two similar asynchronous training jobs with 5 work-
ers to train AlexNet using TensorFlow on an AWS
cluster with and without XAI. By using the default
configuration of TensorFlow (1 parameter server), the
training time was 2x slower than the training time
with XAI. The cost model optimizer in XAI recom-
mended to deploy 5 parameter servers.
DATA 2019 - 8th International Conference on Data Science, Technology and Applications
118
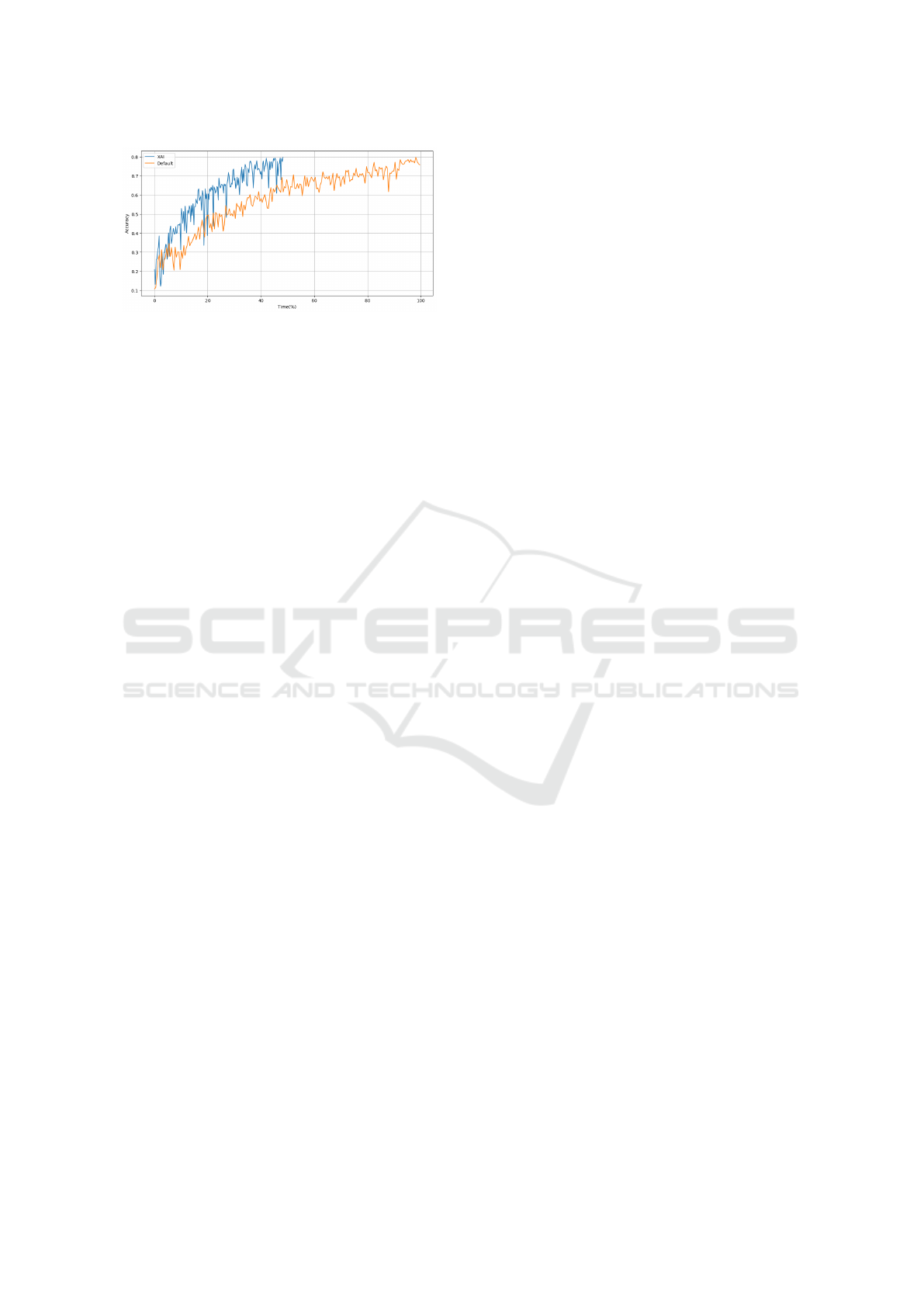
Figure 10: Effectiveness of the Cost Model Optimizer.
8 RELATED WORK
In this section, we discuss related work. We first fo-
cus on recent systems and libraries that have a similar
goal as XAI to enable scalable AI. Afterwards, we dis-
cuss the broader area of automated machine learning
(AutoML) which is also relevant for this paper.
Scalable AI: Many recent deep learning frame-
works such as TensorFlow (Abadi et al., 2016),
MXNet (Apache MXNet, 2018), or CNTK (Microsoft
CNTK, 2018)) support the distribution of the train-
ing process across multiple machines in a cluster of
nodes. However, even if existing well-established
models (such as AlexNet, GoogleNet, or ResNet) are
being used it is still a challenging task to efficiently
scale-out distributed deep learning.
A system that takes similar approaches as XAI
to simplify the distributed training of DNNs with
is Horovod (Sergeev and Del Balso, 2018). How-
ever, there are major differences between XAI and
Horovod. First, Horovod is currently only support-
ing TensorFlow as a framework while XAI is built as
a middleware and can support different deep learning
frameworks. Second, XAI comes with an optimizer
which automatically defines the optimal number of
parameter servers which has to be manually tuned in
Horovod.
Another direction to scale out deep learning more
efficiently is to provide libraries that allow deep learn-
ing frameworks to implement a more efficient com-
munication stack. One example, is the Intel Machine
Learning Scaling Library (MLSL) (Sridharan et al.,
2018). MLSL uses an implementation of the MPI
allreduce primitive to make communication more ef-
ficient. Furthermore, MLSL also comes with some
adaptive execution strategies to better overlap com-
putation and communication. All these optimizations
are orthogonal to the goals of XAI and could be inte-
grated into any of the supported frameworks of XAI.
Another work which is relevant to XAI is (Omni-
Vore) (Hadjis et al., 2016), while (OmniVore) is an
optimizer for multi-device training, however, it works
as a separate system. The major difference is that XAI
is a middleware on top of existing systems and it is de-
signed to support different cluster configurations. The
final target of XAI is to smartly and fully blackboxing
the distributed training job.
Automated Machine Learning: There have been
several attempts to automate machine learning to
make it more accessible. However, these approaches
typically concentrate on hyper-parameter selection
and not on the complete automated deployment of dis-
tributed machine learning as we do in XAI. One no-
table example is Auto-Weka (Thornton et al., 2013).
Auto-WEKA aims to automate the use of Weka (Ma-
chine Learning Group at the University of Waikato,
2018) by applying recent derivative-free optimization
algorithms, in particular Sequential Model-based Al-
gorithm Configuration (SMAC) (Hutter et al., 2011),
to the hyperparameters tuning problem; a small sub-
problem of XAI. Furthermore, there are also Cloud
services like Google AutoML (Google AutoML,
2018). These services, however, are often only usable
in a limited number of scenarios as they significantly
restrict the type of models that can be trained. More-
over, cloud services often enforce other limits such as
a maximum training data-size.
9 CONCLUSIONS
In this paper, we presented XAI, a middleware on
top of existing deep learning frameworks (Apache
MXNet and Tensorflow) to easily scale-out dis-
tributed training of DNNs. At the core of XAI, we
have implemented a distributed optimizer that takes
the model and the available cluster resources as input
and finds an optimal distributed setup of the training
procedure. In the first version of XAI, we only sup-
port distributed training using data-parallelism with a
centralized parameter server. In future, we will ex-
tend XAI to also support not only other frameworks
but also other forms of data-parallelism within those
frameworks (e.g., by replicating the parameters). An-
other interesting route would be to include automatic
model-parallelism in XAI as well.
REFERENCES
Abadi, M. et al. (2016). Tensorflow: A system for large-
scale machine learning. In 12th USENIX Sympo-
sium on Operating Systems Design and Implementa-
XAI: A Middleware for Scalable AI
119

tion, OSDI 2016, Savannah, GA, USA, November 2-4,
2016., pages 265–283.
Apache MXNet (2018). Apache MXNet. https://mxnet.
apache.org/. Accessed: 2018-09-28.
Ben-Nun, T. and Hoefler, T. (2018). Demystifying Parallel
and Distributed Deep Learning: An In-Depth Concur-
rency Analysis. CoRR, abs/1802.0.
Campos, V., Sastre, F., Yag
¨
ues, M., Bellver, M., Gir
´
o-I-
Nieto, X., and Torres, J. (2017). Distributed training
strategies for a computer vision deep learning algo-
rithm on a distributed GPU cluster. Procedia Com-
puter Science, 108:315–324.
Dean, J., Corrado, G., Monga, R., Chen, K., Devin, M.,
Mao, M., Senior, A., Tucker, P., Yang, K., and Le,
Q. V. (2012). Large scale distributed deep networks.
Advances in Neural Information Processing Systems,
pages 1223–1231.
Deng, J., Dong, W., Socher, R., Li, L.-J., Kai Li, and Li
Fei-Fei (2009). ImageNet: A large-scale hierarchical
image database. In 2009 IEEE Conference on Com-
puter Vision and Pattern Recognition, pages 248–255.
IEEE.
Eggensperger, K., Feurer, M., Hutter, F., Bergstra,
J., Snoek, J., Hoos, H., and Leyton-Brown, K.
(2013). Towards an empirical foundation for assessing
bayesian optimization of hyperparameters. In NIPS
workshop on Bayesian Optimization in Theory and
Practice.
Google AutoML (2018). Google AutoML.
https://cloud.google.com/automl/. Accessed: 2018-
09-28.
Hadjis, S., , Zhang, C., Mitliagkas, I., et al. (2016). An
optimizer for multi-device deep learning on cpus and
gpus. In CoRR, page abs/1606.04487.
Hinton, G. E. and Salakhutdinov, R. R. (2006). Reducing
the dimensionality of data with neural networks. Sci-
ence (New York, N.Y.), 313(5786):504–7.
Hutter, F. et al. (2011). Sequential model-based optimiza-
tion for general algorithm configuration. In Proceed-
ings of the 5th International Conference on Learning
and Intelligent Optimization, LION’05.
Jin, P. H., Yuan, Q., Iandola, F., and Keutzer, K. (2016).
How to scale distributed deep learning? CoRR.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
ageNet Classification with Deep Convolutional Neu-
ral Networks. Advances In Neural Information Pro-
cessing Systems, pages 1–9.
Machine Learning Group at the University of Waikato
(2018). Weka 3: Data Mining Software in Java.
http://www.cs.waikato.ac.nz/ml/weka/. Accessed:
2018-09-28.
Math Pages (2018). Probability of intersecting inter-
vals. http://www.mathpages.com/home/kmath580/
kmath580.htm. Accessed: 2018-09-24.
Microsoft CNTK (2018). The Microsoft Cognitive
Toolkit. https://www.microsoft.com/en-us/cognitive-
toolkit/. Accessed: 2018-09-28.
Minsky, M. and Papert, S. (1969). Perceptrons; an intro-
duction to computational geometry. MIT Press.
O’Reilly Podcast (2018). How to train and deploy deep
learning at scale. https://www.oreilly.com/ideas/how-
to-train-and-deploy-deep-learning-at-scale/. Ac-
cessed: 2018-09-28.
Rosenblatt, F. (1958). The perceptron: A probabilistic
model for information storage and organization in the
brain. Psychological Review, 65(6):386–408.
Sculley, D. et al. (2015). Hidden technical debt in machine
learning systems. In Advances in Neural Information
Processing Systems 28: Annual Conference on Neural
Information Processing Systems 2015, December 7-
12, 2015, Montreal, Quebec, Canada, pages 2503–
2511.
Sergeev, A. and Del Balso, M. (2018). Horovod: fast and
easy distributed deep learning in TensorFlow. CoRR.
Sridharan, S., Vaidyanathan, K., Kalamkar, D., Das, D.,
Smorkalov, M. E., Shiryaev, M., Mudigere, D.,
Mellempudi, N., Avancha, S., Kaul, B., and Dubey,
P. (2018). On Scale-out Deep Learning Training for
Cloud and HPC. CoRR, pages 16–18.
Thornton, C. et al. (2013). Auto-weka: combined selec-
tion and hyperparameter optimization of classification
algorithms. In SIGKDD, pages 847–855.
DATA 2019 - 8th International Conference on Data Science, Technology and Applications
120
