
Taming Complexity with Self-managed Systems
Daniel A. Menasc
´
e
a
Department of Computer Science, George Mason University, Fairfax, VA, U.S.A.
Keywords:
Autonomic computing, self-managed Systems, Utility Functions.
Abstract:
Modern computer information systems are highly complex, networked, have numerous configuration knobs,
and operate in environments that are highly dynamic and evolving. Therefore, one cannot expect that config-
urations established at design-time will meet QoS and other non-functional goals at run-time. For that reason,
the design of complex systems needs to incorporate controllers for adapting the system at run time. This pa-
per describe the four properties of self-managed systems: self-configuring, self-optimizing, self-healing, and
self-protecting. It also describes through concrete examples how these properties are enforced by controllers
I designed for a variety of domains including cloud computing, fog/cloud computing, Internet datacenters,
distributed software systems, and secure database systems.
1 INTRODUCTION
Modern computer systems are networked, are com-
posed of a very large number of interconnected
servers, have many software layers that may include
services developed by many different vendors, are
composed of hundreds of thousands of lines of code,
and are user-facing. Additionally, these systems have
stringent Quality of Service (QoS) requirements in
terms of response time, throughput, availability, en-
ergy consumption, and security. These systems have
a very large number of configuration settings that sig-
nificantly impact their QoS behavior.
This complexity is compounded by the fact that
the workload intensity of these complex systems
varies in rapid and hard-to-predict ways.
For these reasons, it is virtually impossible for
human beings to change the configuration settings
of a complex system in near real-time in order to
steer the system to an optimal operating point that
meets user-established QoS goals. Recognizing this,
IBM introduced the concept of autonomic comput-
ing, as a sub-discipline of computer science that
deals with systems that are self-configuring, self-
optimizing, self-healing, and self-protecting (Kephart
and Chess, 2003). Autonomic computing systems are
also referred to as self-managed systems.
The rest of this paper is organized as follows. Sec-
tion 2 describes the basics of self-managed systems.
Section 3 discusses how an autonomic controller can
a
https://orcid.org/0000-0002-4085-6212
be used to provide elasticity to cloud providers al-
lowing them to cope with workload surges by dy-
namically varying the number of servers offered to
users. Section 4 provides an example of how an auto-
nomic controller can deal with tradeoffs between se-
curity and response time by dynamically varying the
security policies of an Intrusion Detection and Pre-
vention Systems (IDPS). The next section discusses
how an autonomic controller can dynamically control
the voltage and frequency of a CPU in order to meet
performance requirements with the least possible en-
ergy consumption. Section 6 provides a list of other
examples of self-managed systems. Finally, Section 7
provides some concluding remarks.
2 BASICS OF SELF-MANAGED
SYSTEMS
This section discusses the basics of self-managed
systems aka autonomic computing systems, a term
coined by IBM (Kephart and Chess, 2003) more than
a decade ago. The term autonomic computing was
inspired by the central autonomic nervous system,
which unconsciously regulates bodily functions such
as the heart and respiratory rate, digestion, and others.
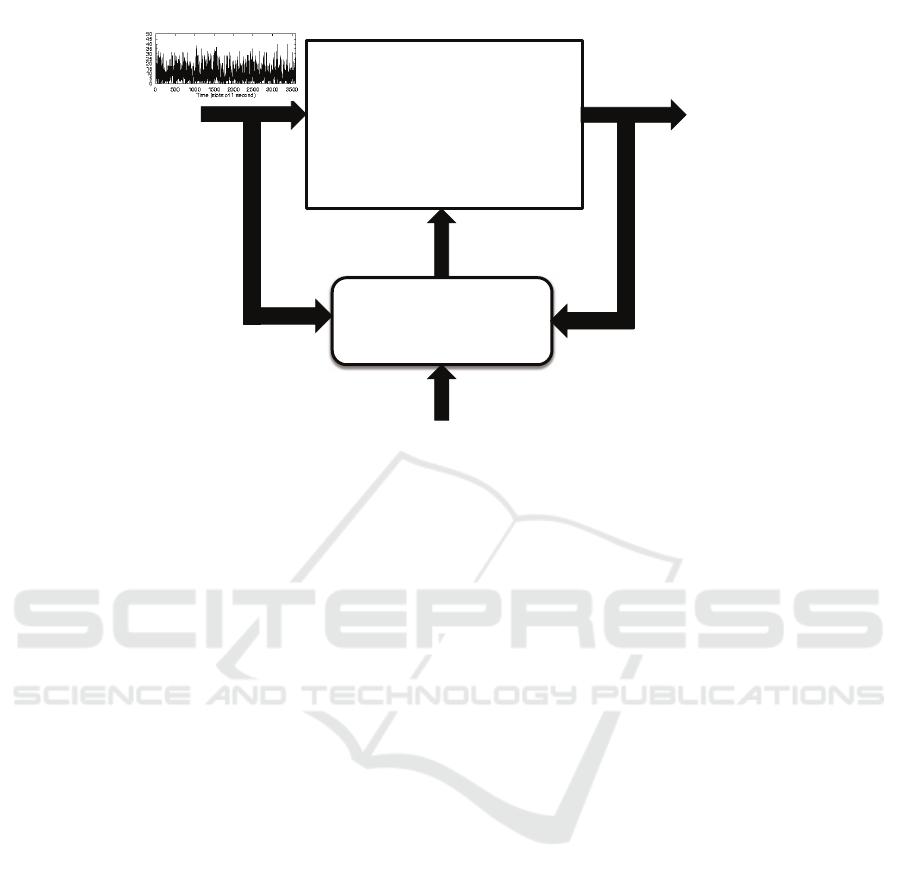
Figure 1 illustrates the basic components of a self-
managed system. The system to be controlled is sub-
ject to a workload that consists of the sets of all in-
puts to the system (e.g., requests, transactions, web
requests, and service requests). The output metrics
MenascÃl’, D.
Taming Complexity with Self-managed Systems.
DOI: 10.5220/0008346100050013
In Proceedings of the 21st International Conference on Enterprise Information Systems (ICEIS 2019), pages 5-13
ISBN: 978-989-758-372-8
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
5
!"#$%&'$(')%''
*(+$,(--%.'
/(+$,(--%,'
!"#$%"&'(
")*+)*(,-*#./0(
1.213%-4-%(2"&%0(
%"!3%-4-%((
/"5*#"%0(
Figure 1: Basic components of a self-managed system.
of the system are associated with the QoS delivered
by the system when processing the inputs. Exam-
ples of output metrics are: (a) 95% of web requests
have a response time less than or equal to 0.8 sec; (b)
the average search engine throughput is at least 4,600
queries/sec; (c) the availability of the e-mail portal is
greater than or equal to 99.978%; and (d) the percent-
age of phishing e-mails filtered by the e-mail portal is
greater than or equal to 90%.
Figure 1 also depicts a controller that monitors
the system input, i.e., the workload, its output met-
rics, and compares the measured output metrics with
high-level goals established by the system stakehold-
ers. The controller reacts to deviations from the de-
sired QoS levels established by the stakeholders by
automatically deriving a plan to change the system’s
configuration by changing low-level controls in a way
that improves the system’s QoS and makes it compli-
ant, if the system resources permit, with the high-level
goals.
Self-managed systems work along the following
dimensions: (a) Self-configuring: The system auto-
matically decides how to best configure itself when
new components or services become available or
when existing ones are decommissioned. (b) Self-
optimizing: The system attempts to optimize the value
of its QoS metrics (e.g., minimizing response time,
maximizing throughput and availability). (c) Self-
healing: The system has to automatically recover
from failures. This requires that the root causes of
failures be determined and that recovery plans be de-
vised to restore the system to an adequate operational
state. In addition, the system has to predict the occur-
rence of failures and prevent their manifestation. (d)
Self-protecting: The system has to be able to detect
and prevent security attacks, even zero-day attacks,
i.e., attacks that target publicly known but still un-
patched vulnerabilities.
Optimizing a system for the four dimensions
above may be challenging because there are tradeoffs
among them. For example, it may be necessary to
add several cryptographic-based defenses to improve
a system’s security. However, these defenses have a
computational cost and increase the response time and
decrease the throughput (Menasc
´
e, 2003). As another
example, one may increase the reliability of a sys-
tem, and therefore improve its self-healing capabili-
ties, by using redundant services with diverse imple-
mentations. However, this approach tends to increase
response time.
In addition, there usually are constraints in terms
of cost and/or energy consumption associated with
this optimization problem, which has to be solved
in near real-time to cope with the rapid variations of
the workload. This problem is a multi-objective opti-
mization problem (Miettinen, 1999). In order to deal
with the tradeoffs, it is common to use utility func-
tions for each metric of interest and then combine
them into a global utility function to be optimized.
A utility function indicates how useful a system
is with respect to a given metric. Utility functions
are normalized (in our case in the [0,1] range) with 1
indicating the highest level of usefulness and 0 the
lowest. For example, if the metric is response time,
the utility function of the response time decreases as
the response time increases, and approaches 1 as the
ICEIS 2019 - 21st International Conference on Enterprise Information Systems
6

response time decreases. As another example, a util-
ity function of availability increases as the availability
increases.
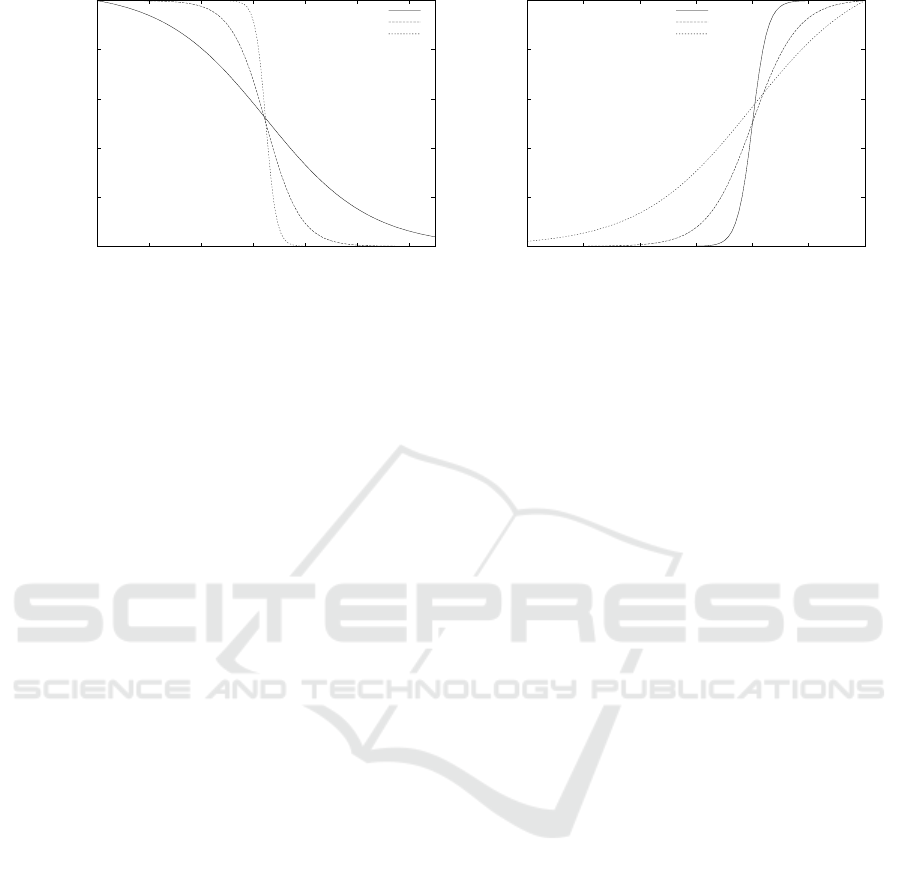
We assume here that all utility functions are con-
sistent, i.e., they increase or decrease in the right di-
rection according to the metric. So, a utility function
that increases as the response increases is not consis-
tent. Figure 2 shows examples of utility functions.
The lefthand side of the figure shows three different
functions with different shape factor (α) but with the
same service level goal (β = 65.0), which is the in-
flection point of the curve. The righthand side of
Fig. 2 shows three different availability utility func-
tions. The inflection point is the same for all of them,
i.e., 0.99.
The controller of Fig. 1 typically awakes at regu-
lar time intervals, called controller intervals and de-
noted as ∆. Then, the controller (a) verifies all the
monitoring data collected during the past controller
interval(s), (b) analyzes how the measured output
metrics compare with the high-level goals, (c) gen-
erates, if necessary, a plan to change the configu-
ration controls to bring the system in line with the
high-level goals, and (d) executes the plan by send-
ing commands to the system. The plan is generated
based on knowledge of models of the system behav-
ior, which will guide the generation of new configu-
ration parameters as explained in what follows. The
paradigm described above is called MAPE-K, which
stands for Monitor, Analyze, Plan, and Execute based
on Knowledge (Kephart and Chess, 2003).
We formalize now the operation of an autonomic
controller (just controller heretofore). To that end we
define the following notation.
• K: number of configuration knobs (low level con-
trols in Fig. 1) the controller is able to change.
•
~
C(t) = (C
1
,··· ,C
K
): vector of values of the K
configuration knobs at time t.
• C : set of all possible vectors
~
C(t).
• W (t): workload intensity at time t. This is usu-
ally the workload intensity in the last controller
interval but could also be a predicted workload for
the next controller interval.
• S(t) = (
~
C(t),W (t)): system state at time t, which
consists of the system configuration and the work-
load at time t.
• m: number of ouput metrics monitored by the con-
troller.
• D
i
: domain of metric i.
• x
i
(t) ∈ D
i
: value of metric i (i = 1, ··· , m) at
time t.
• g
i
(S(t)): function used to compute (i.e., esti-
mate) the value of metric i at time t. So, x
i
(t) =
g
i
(S(t)) = g
i
((
~
C(t),W (t)). The function g
i
() rep-
resents a model of the system being controlled. In
virtually all cases of interest, the functions g
i
() are
non-linear.
• U
i
(x
i
) ∈ [0, 1]: utility function for metric i. This is
a function of the values of metric i.
• U
g
(x
1
,··· , x
m
) = f (U
1
(x
1
),··· ,U
m
(x
m
)): global
utility function, which is a function of all individ-
ual utility functions.
The functions g
1
(),··· , g
m
() are typically analytic
models used to estimate the values of each of the m
metrics as a function of the current or future system
state S(t). The functions U
i
(), i = 1,··· , m and U
g
()
are the high-level goals and are determined by the
stakeholders.
At any time instant t at which the controller wakes
up, it selects values for the configuration parameters
that will be in place from time t to time t + ∆, when
the controller will wake up again and possibly make
another selection of parameters.
Because the global utility function is a function
of the values of the metrics (i.e., U
g
(x
1
,··· , x
m
))
and because each value x
i
is a function g
i
(S(t)) =
g
i
((
~
C(t),W (t)) of the system parameters, the con-
troller needs to find a configuration vector
~
C
∗
(t) that
maximizes the global utility function. More precisely,
~
C
∗
(t) = argmax
∀
~
C(t)∈C
{ f (U
1
(g
1
((
~
C(t),W (t))),
··· ,U
m
(g
m
((
~
C(t),W (t))))}
In many cases we may want to add constraints
such as a cost constraint: Cost(
~
C(t)) ≤ CostMax
It should be noted that complex computer systems
have a large number of configuration knobs and the
number of possible values of each is usually large.
Therefore, we have a combinatorial explosion in the
cardinality of C .
Additionally, the solution of the optimization
problem stated above has to be obtained in near-
real time. For this reason, we often resort to the
use of combinatorial search techniques such as hill-
climbing, beam-search, simulated annealing, and evo-
lutionary computation to find a near-optimal solution
in near real-time (Ewing and Menasc
´
e, 2014).
3 TAMING WORKLOAD SURGES
Most user-facing systems such as Web sites, social
network sites, and cloud providers suffer from the
phenomenon of workload surges (aka flash crowds),
Taming Complexity with Self-managed Systems
7
0
0.2
0.4
0.6
0.8
1
0 20 40 60 80 100 120
Utility
Execution Time
α = 0.05, β = 65.0
α = 0.15, β = 65.0
α = 0.50, β = 65.0
0
0.2
0.4
0.6
0.8
1
0.97 0.975 0.98 0.985 0.99 0.995 1
Utility
Availability
α = -1500, β = 0.99
α = -500, β = 0.99
α = -200, β = 0.99
Figure 2: Left side: examples of utility functions for execution time. Right side: examples of utility functions for availability.
All examples are sigmoid functions.
i.e., periods of relatively short duration during which
the arrival rate (measured in arriving requests per sec-
ond) exceeds the system’s capacity (measured in the
maximum number of requests per second that can be
processed). The ratio between the average arrival rate
of requests and the system’s capacity is called traffic
intensity and is typically denoted by ρ in the queuing
literature. A queuing system is in steady-state when
ρ < 1.
The top of Fig. 3 illustrates an example of a work-
load intensity surge from traces publicly made avail-
able by Google. As the figure illustrates, the surge
occurs in the interval between 600 sec and 1,500 sec,
during which time the workload intensity increased
by a 4.5 factor: from an average of 0.2 requests/sec
to 0.9 requests/sec. The peak of the surge occurred at
time equal to 1,200 sec. The middle curve of Fig. 3
shows that the response time increased from its pre-
surge value of 10 sec to a peak value of 375 sec, i.e.,
a 37.5-fold increase. Additionally, the peak response
time caused by the surge occurred at 1,600 sec, i.e.,
300 sec after the peak of the surge occurred.
The bottom part of Fig. 3 shows various curves
obtained by using an elasticity controller that uses an
analytic model used to predict the response time of a
multi-server queue under surge conditions (i.e., when
ρ > 1) (Tadakamalla and Menasc
´
e, 2018). This model
establishes a relashionship between the maximum de-
sirable response time, the traffic intensity, and param-
eters that determine the geometry of the surge (the red
curve in the bottom figure is a trapezoidal approxima-
tion of the surge in the top figure). The cyan curve
is a predicted response time curve based on the trape-
zoidal approximation and is obtained from the ana-
lytic model.
The autonomic controller monitors the traffic in-
tensity ρ at regular intervals and detects when it ex-
ceeds 1. At this point it uses the model to compute
the minimum number of servers needed to bring down
the response time. Every time the controller wakes up
and notices that ρ > 1 it adjusts the number of needed
servers. The green step curve in the bottom of Fig. 3
shows that the system capacity increased twice during
the surge and that the response time (see blue curve at
the bottom of Fig. 3) reached at most 50 sec instead
of 375 sec without the controller.
4 AUTONOMIC INTRUSION
DETECTION PREVENTION
SYSTEMS
As indicated in Section 2, the properties of self-
managed systems include self-optimizing and self-
protecting. In this section, we present an example of
a work (Alomari and Menasc
´
e, 2013) that discusses
the design, implementation, and use of an autonomic
controller to dynamically adjust the security policies
of an Intrusion Detection Prevention System (IDPS).
There are two types of IDPSs: data-centric and
syntax-centric. The former type inspects the data
coming from a backend database to a client and de-
termines if the security policies of the IDPS allow the
requesting user to receive the data. The latter, inspects
the syntax of SQL requests and determines if the se-
curity policies of the IDPS allow the requesting user
to submit that request. Because no IDPS is able to
cover all types of possible attacks, many systems use
several data-centric and several syntax-centric IDPSs.
So, an incoming request will have to be processed
by several syntax-centric IDPSs of different types and
an outgoing response will have to be handled by sev-
eral different data-centric IDPSs. While this process
increases the security of a system, it may severely de-
grade its performance.
For example, when a system is under a high work-
load, it might be acceptable to modify the security
ICEIS 2019 - 21st International Conference on Enterprise Information Systems
8
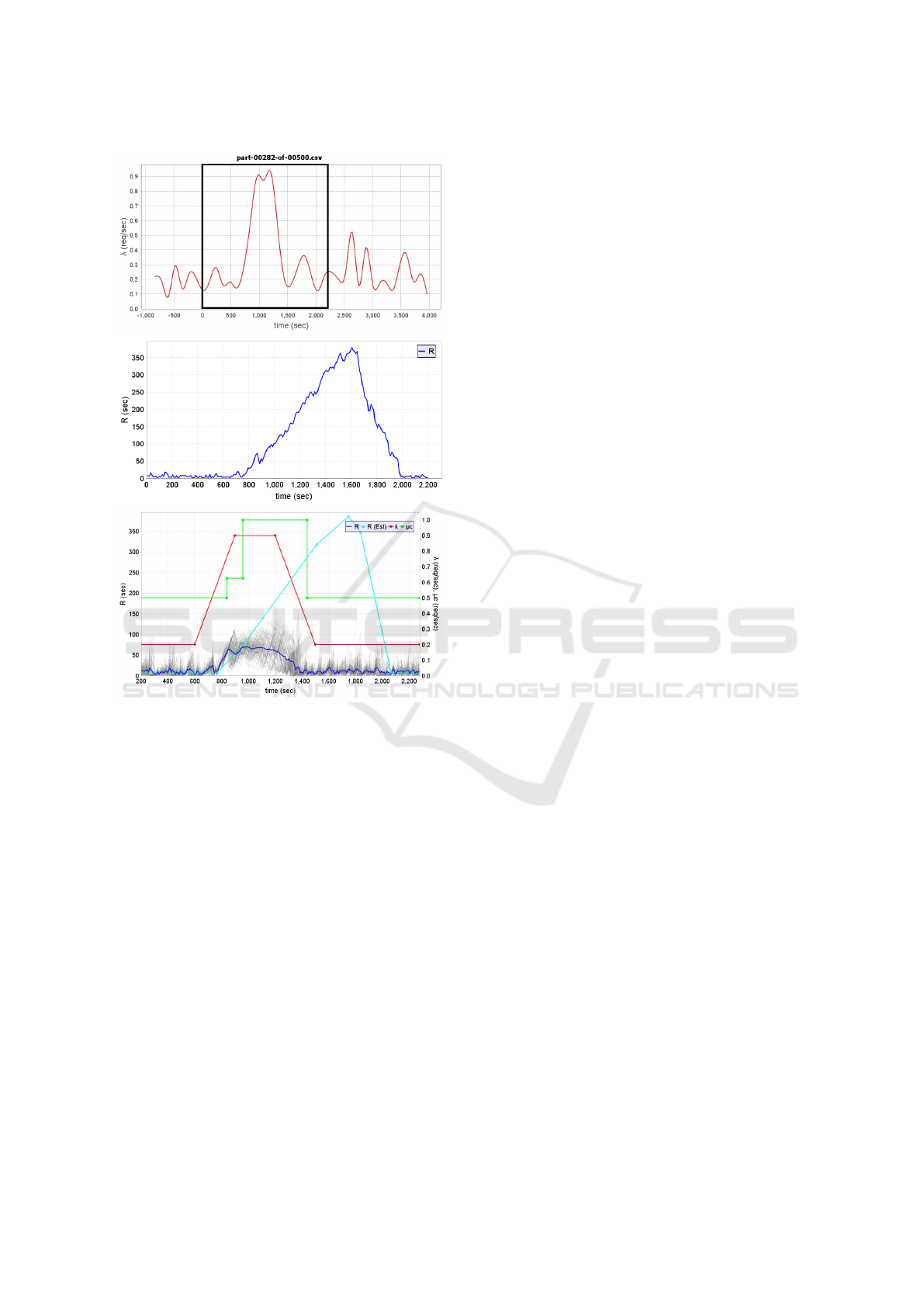
Figure 3: (a) Top – Example of a trapezoidal workload
surge from Google’s cluster-usage trace file, part-00282-of-
00500.csv; workload surge period: 600-1,500 sec; average
arrival rate before and after surge: 0.2 requests/sec; maxi-
mum arrival rate during surge: 0.9 requests/sec; (b) Mid-
dle – System’s response time for the duration correspond-
ing to the black highlighted box from the top figure; (c)
Bottom – Red curve: approximated trapezoidal workload;
Green curve: total server capacity; Cyan curve: Estimated
response time curve based on the red curve; Blue curve:
Response time with the controller averaged over 100 inde-
pendent runs using the Google trace workload in part (a)
above. See (Tadakamalla and Menasc
´
e, 2018).
policies to relax some of the security requirements
temporarily to meet increasing demands. Addition-
ally, since in most situations, different system stake-
holders view priorities differently, the relaxation in
security requirements should ideally be based on pre-
defined stakeholder preferences and risks.
We designed an autonomic controller that dynam-
ically changes the system security policies in a way
that maximizes a utility function that is the combina-
tion of two utility functions: one for performance and
another for security (Alomari and Menasc
´
e, 2013).
The former is a function of the predicted response
time and the latter is a function of the detection rate
and false positive rate. Users are classified into roles
and security policies are associated with the different
roles. A security policy for a role r is defined as a vec-
tor
~
ρ
r
= (ε
r,1
,··· , ε
r,M
) where ε
r,i
= 0 if IDPS i is not
used for requests of role r and equal to 1 otherwise.
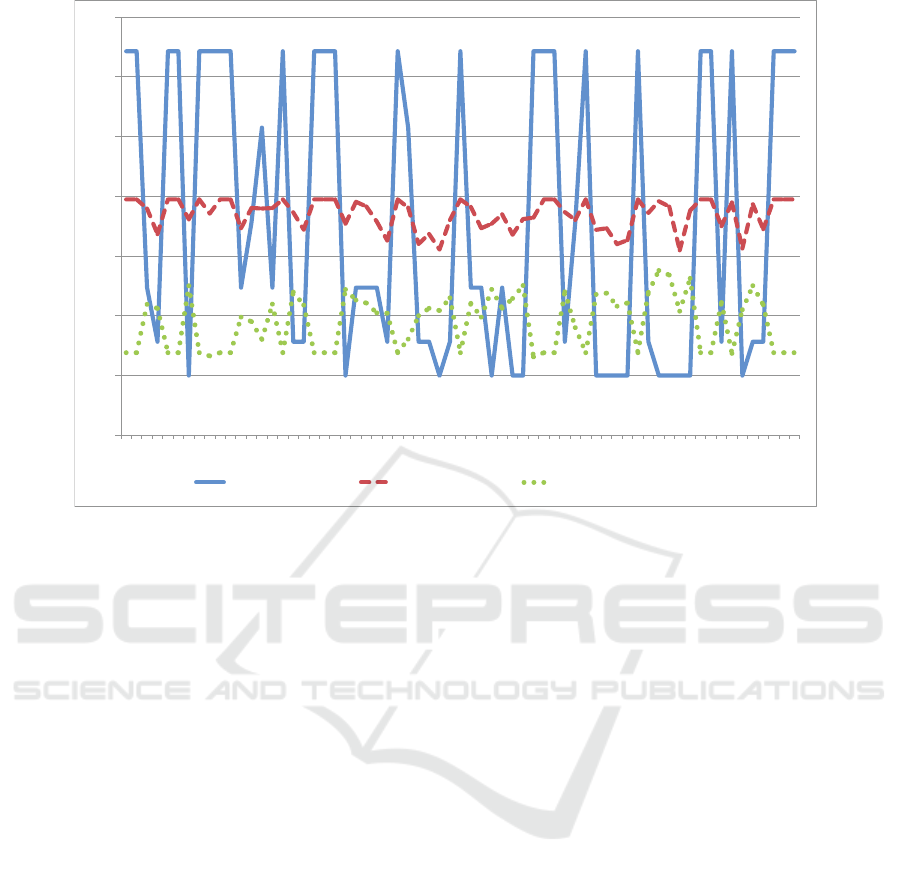
Figure 4 illustrates the results of experiments con-
ducted with the controller in a TPC-W e-commerce
site. The x-axis for all graphs is time measured in con-
troller intervals (i.e., the time during which the con-
troller sleeps).
The graph in Fig. 4 (a) illustrates the variation
of the workload intensity measured in number of re-
quests received by the system over time. As it can be
seen, the workload is very bursty and varies widely
(between 50 req/sec and 140 req/sec). The high work-
load peaks cause response time spikes that violate the
Service Level Agreements (SLA) of 1 second for ac-
cess to the home page and 3 seconds for search re-
quests as illustrated in Fig. 4 (b). Figure 4 (c) shows
three global utility curves. The top curve is obtained
when the controller is enabled and shows that the util-
ity is kept at around 0.8 despite the variations in the
workload. The middle curve is obtained when the
controller is disabled and the security policy is pre-
configured and does not change dynamically; in this
case the global utility is about 0.6. Finally, the bottom
curve is obtained when a full security policy (i.e., one
in which all IDPSs are enabled for all roles) is used.
In this case, a very low global utility of around 0.48 is
observed.
Thus, as Fig. 4 shows, the autonomic controller
is able to maintain the global utility at a level 67%
higher than when the all IDPSs are enabled by re-
ducing the security policies when the workload goes
through periods of high intensity.
5 AUTONOMIC
ENERGY-PERFORMANCE
CONTROL
Power consumption at modern data centers is now
a significant component of the total cost of owner-
ship. Exact numbers are difficult to obtain because
companies such as Google, Microsoft, and Amazon
do not reveal exactly how much energy their data
centers consume. However, some estimates reveal
that Google uses enough energy to continously power
200,000 homes (Menasc
´
e, 2015).
Most modern CPUs provide Dynamic Voltage and
Frequency Scaling (DVFS), which allows the pro-
Taming Complexity with Self-managed Systems
9

!"
#!"
!
"!
Figure 4: Experiment results (see (Alomari and Menasc
´
e, 2013)): (a) (top-left) Workload variation, (b) (top right) Response
time for Home and Search page requests without the controller, (c) (bottom) Three global utility values: with the controller,
for a fixed pre-configured policy, and for a full security policy.
cessor to operate at different levels of voltage and
clock frequency values. Because a processor’s dy-
namic power is proportional to the product of the
square of its voltage by its clock rate, it is possi-
ble to control the power consumed by a processor by
dynamically varying the clock frequency. However,
lower clock frequencies imply in worse performance
and higher clock rates improve the processor’s perfor-
mance. Therefore, it would be ideal to dynamically
vary a processor’s clock rate so that as the workload
intensity increases, the clock rate is increased to meet
response time SLAs. And, as the workload intensity
decreases the clock frequency should be decreased to
the lowest value that would maintain the desired SLA
so as to conserve energy.
Many microprocessors allow for states in which a
different voltage-frequency pair is allowed. For ex-
ample, the Intel Pentium M processor supports the
following six voltage-frequency pairs: (1.484 V, 1.6
GHz), (1.420 V, 1.4 GHz), (1.276 V, 1.2 GHz), (1.164
V, 1.0 GHz), (1.036 V, 800 MHz), and (0.956 V, 600
MHz) (Intel, 2004). As indicated above, micropro-
cessors with DVFS offer a discrete set of voltage-
frequency pairs.
We designed and experimented with an autonomic
DVFS controller that dynamically adjusts the voltage-
frequency pair of the CPU to the lowest value that
meets a user-defined response time SLA (Menasc
´
e,
2015).
Figure 5 illustrates an example of the variation of
the average arrival rate (λ) over time. As it can be
seen, the workload intensity varies widely between
0.01 tps and 0.61 tps.
!"!#
!"$#
!"%#
!"&#
!"'#
!"(#
!")#
!"*#
$# &# (# *# +# $$#$&#$(#$*#$+#%$#%&#%(#%*#%+#&$#&&#&(#&*#&+#'$#'&#'(#'*#'+#($#(&#((#(*#(+#)$#)&#
)(#
!"#$%&#'!$$("%)'$%*#'+*,-.'
/(0#'12*#$"%)-'
Figure 5: Average Transaction Arrival Rate (in tps) vs.
Time Intervals.
The DVFS autonomic controller is able to react to
these variations as shown in Fig. 6 that shows three
different curves. The x-axis follows the same time in-
tervals as in Fig. 5 but the scale on that axis is labelled
with the values of λ over the interval. The solid curve
shows the variation of the relative power consumption
that results from the variation of the voltage and CPU
clock frequencies. We define the relative power con-
ICEIS 2019 - 21st International Conference on Enterprise Information Systems
10

sumption as the ratio between the power consumed by
the processor for a given pair of voltage and frequency
values and the lowest power consumed by the proces-
sor, which happens when the lowest voltage and fre-
quencies are used.
As can be seen, the shape of the relative power
curve follows closely the variation of the workload
intensity. Higher workload intensities require higher
CPU clock frequencies and voltage levels and there-
fore higher relative power consumption. The dashed
curve of Fig. 6 shows the variation of the average re-
sponse time over time. The first observation is that the
average response time never exceeds its SLA of 4 sec.
The response time, given that the I/O service demand
is fixed throughout the experiment, is a function of the
arrival rate λ and the CPU clock frequency during the
time interval. This curve and the dotted line (i.e., the
CPU residence time) in the same figure clearly show
how the autonomic DVFS controller does its job.
6 OTHER EXAMPLES OF
SELF-MANAGED SYSTEMS
Self-managed systems have been used in a wide vari-
ety of systems in addition to the examples discussed
above. In (Tadakamalla and Menasc
´
e, 2019), the
authors discuss an autonomic controller that dynam-
ically determines the portion of a transaction that
should be processed at a fog server vs. at a cloud
server. The controller deals with tradeoffs between lo-
cal processing (less wide area network time but higher
local congestion) and remote processing (more wide
area network traffic but use of more powerful servers
and therefore less remote congestion).
The authors in (Bajunaid and Menasc
´
e, 2018)
show how one can dynamically control the check-
pointing frequency of processes in a distributed sys-
tem so as to balance execution time and availability
tradeoffs.
The work in (Connell et al., 2018) presents ana-
lytic models of Moving Target Defense (MTD) sys-
tems with reconfiguration limits. MTDs are security
mechanisms that periodically reconfigure a system’s
resources to reduce the time an attacker has to learn
about a system’s characteristics. When the reconfigu-
ration rate is high, the system security is improved at
the expense of reduced performance and lower avail-
ability. To control availability and performance, one
can vary the maximum number of resources that can
be in the process of being reconfigured simultane-
ously. The authors of (Connell et al., 2018) devel-
oped a controller that dynamically varies the max-
imum number of resources being reconfigured and
the reconfiguration rate in order to maximize a util-
ity function of performance, availability, and security.
The Distributed Adaptation and REcovery
(DARE) framework designed at Mason (Albassam
et al., 2017) uses a distributed MAPE-K loop to
dynamically adapt large decentralized software
systems in the presence of failures. The Self-
Architecting Service-Oriented Software SYstem
(SASSY) project (Menasc
´
e et al., 2011), also de-
veloped at Mason, allows for the architecture of
an SOA system to be automatically derived from a
visual-activity based specification of the application.
The resulting architecture maximizes a user-specified
utility function of execution time, availabiliy, and
security. Additionally, run-time re-architecting
takes place automatically when services fail or the
performance of existing services degrades.
In (Menasc
´
e et al., 2015) the authors describe
how autonomic computing can be used to dynami-
cally control the throughput and energy consumption
of smart manufacturing processes.
The authors in (Aldhalaan and Menasc
´
e, 2014),
discuss the design and evaluation of an autonomic
controller that dynamically allocates and re-allocates
communicating virtual machines (VM) in a hierarchi-
cal cloud datacenter. Communication latency varies
if VMs are colocated in the same server, same rack,
same cluster, or same datacenter. The controller em-
ploys user-specified information about communica-
tion strength among requested VMs in order to de-
termine a near-optimal allocation.
The authors in (Ewing and Menasc
´
e, 2009) pre-
sented the detailed design of an autonomic load bal-
ancer (LB) for multi-tiered Web sites. They assumed
that customers can be categorized into distinct classes
(gold, silver, and bronze) according to their business
value to the site. The autonomic LB is able to dynam-
ically change its request redirection policy as well as
its resource allocation policy, which determines the
allocation of servers to server clusters, in a way that
maximizes a business-oriented utility function.
In (Bennani and Menasce, 2005), the authors pre-
sented a self-managed method to assign applications
to servers of a data center. As the workload inten-
sity of the applications varies over time, the number
of servers allocated to them is dynamically changed
by an autonomic controller in order to maximize a
utility function of the application’s response time and
throughput.
Taming Complexity with Self-managed Systems
11
!"!#
$"!#
%"!#
&"!#
'"!#
("!#
)"!#
*"!#
!")#!"'#!")# !"$# !")# !")#!"(#!"'#!"%#!")#!")# !"'# !"&# !")#!"%#!"!#!")#!"&# !"'# !"$# !")# !"&#!")#!"$#!"!#!"%# !"$# !"$# !")# !")#!"&#!")#
!")#
+,-./0,#123,4# +,56275,#/8,# 91:#+,5;<,7=,#>;8,#
Figure 6: Solid line: Relative Power vs. Time Intervals; Dashed Line: Average Response Time (in sec) vs. Time Intervals;
Dotted Line: CPU Residence Time (in sec) vs. Time Intervals; Time Intervals are labelled with their arrival rates (in tps).
7 CONCLUDING REMARKS
Most modern information systems are very complex
due to their scale and resource heterogeneity, consist
of layered software architectures, are subject to vari-
able and hard-to-predict workloads, and use services
that may fail and have their performance degraded at
run-time. Thus, complex information systems typi-
cally operate in ways not foreseen at design time.
Additionally, these software systems have a large
number of configuration parameters. A few exam-
ples of parameters include: web server (e.g., HTTP
keep alive, connection timeout, logging location, re-
source indexing, maximum size of the thread pool),
application server (e.g., accept count, minimum and
maximum number of threads), database server (e.g.,
fill factor, maximum number of worker threads, min-
imum amount of memory per query, working set
size, number of user connections), TCP (e.g., time-
out, maximum receiver window size, maximum seg-
ment size).
Some parameters have a discrete set of values
(e.g., maximum number of worker threads, number of
user connections) and others can have any real value
within a given interval (e.g., TCP timeout, DB page
fill factor). The authors in (Sopitkamol and Menasc
´
e,
2005) discussed a method for evaluating the impact of
software configuration parameters on a system’s per-
formance.
As discussed in this paper, it is next to impossi-
ble for human beings to continously track the changes
in the environment in which a system operates in or-
der to make a timely determination of the best set of
configuration parameters necessary to move the sys-
tem to an operating point that meets user expecta-
tions. For that reason, complex systems have to be
self-managed.
REFERENCES
Albassam, E., Porter, J., Gomaa, H., and Menasc
´
e, D. A.
(2017). DARE: A distributed adaptation and failure
recovery framework for software systems. In 2017
IEEE International Conference on Autonomic Com-
puting (ICAC), pages 203–208.
Aldhalaan, A. and Menasc
´
e, D. A. (2014). Autonomic al-
location of communicating virtual machines in hierar-
chical cloud data centers. In 2014 Intl. Conf. Cloud
and Autonomic Computing, pages 161–171.
Alomari, F. B. and Menasc
´
e, D. A. (2013). Self-protecting
and self-optimizing database systems: Implementa-
tion and experimental evaluation. In Proc. 2013 ACM
Cloud and Autonomic Computing Conference, CAC
’13, pages 18:1–18:10, New York, NY, USA. ACM.
ICEIS 2019 - 21st International Conference on Enterprise Information Systems
12

Bajunaid, N. and Menasc
´
e, D. A. (2018). Efficient mod-
eling and optimizing of checkpointing in concurrent
component-based software systems. Journal of Sys-
tems and Software, 139:1 – 13.
Bennani, M. and Menasce, D. (2005). Resource allocation
for autonomic data centers using analytic performance
models. In Proc. Intl. Conf. Automatic Computing,
ICAC ’05, pages 229–240, Washington, DC, USA.
IEEE Computer Society.
Connell, W., Menasc
´
e, D. A., and Albanese, M. (2018). Per-
formance modeling of moving target defenses with re-
configuration limits. IEEE Tr. Dependable and Secure
Computing, page 14.
Ewing, J. and Menasc
´
e, D. A. (2009). Business-oriented au-
tonomic load balancing for multitiered web sites. In
Proc. Intl. Symp. Modeling, Analysis and Simulation
of Computer and Telecommunication Systems, MAS-
COTS. IEEE.
Ewing, J. M. and Menasc
´
e, D. A. (2014). A meta-controller
method for improving run-time self-architecting in
SOA systems. In Proc. 5th ACM/SPEC Intl. Conf.
Performance Engineering, ICPE ’14, pages 173–184,
New York, NY, USA. ACM.
Intel (2004). Enhanced Intel speedstep technology for the
Intel Pentium M processor.
Kephart, J. O. and Chess, D. M. (2003). The vision of auto-
nomic computing. IEEE Computer, 36(1):41–50.
Menasc
´
e, D. (2003). Security performance. IEEE Internet
Computing, 7(3):84–87.
Menasc
´
e, D., Gomaa, H., Malek, S., and Sousa, J. (2011).
SASSY: A framework for self-architecting service-
oriented systems. IEEE Software, 28:78–85.
Menasc
´
e, D. A. (2015). Modeling the tradeoffs between
system performance and CPU power consumption.
In Proc. Intl. Conf. Computer Measurement Group.
CMG.
Menasc
´
e, D. A., Krishnamoorthy, M., and Brodsky, A.
(2015). Autonomic smart manufacturing. J. Decision
Systems, 24(2):206–224.
Miettinen, K. (1999). Nonlinear Multiobjective Optimiza-
tiong. Springer.
Sopitkamol, M. and Menasc
´
e, D. A. (2005). A method
for evaluating the impact of software configuration
parameters on e-commerce sites. In Proceedings of
the 5th International Workshop on Software and Per-
formance, WOSP ’05, pages 53–64, New York, NY,
USA. ACM.
Tadakamalla, U. and Menasc
´
e, D. A. (2019). Auto-
nomic resource management using analytic models
for fog/cloud computing. In Proc. IEEE Intl. Conf.
Fog Computing. IEEE.
Tadakamalla, V. and Menasc
´
e, D. A. (2018). Model-driven
elasticity control for multi-server queues under traf-
fic surges in cloud environments. In 2018 Intl. Conf.
Autonomic Computing (ICAC), pages 157–162. IEEE.
Taming Complexity with Self-managed Systems
13
