
Cooperative Automated Driving: From Platooning to Maneuvering
Jeroen Ploeg
1,2 a
and Redmer de Haan
1
1
Cooperative Driving group, 2getthere B.V., Utrecht, The Netherlands
2
Department of Mechanical Engineering, Dynamics and Control Group,
Eindhoven University of Technology, Eindhoven, The Netherlands
Keywords:
Cooperative Automated Driving, Platooning, Maneuvering, Safety, Control System Architecture.
Abstract:
Cooperative automated driving (CAD) combines autonomous driving with cooperative driving, thereby yield-
ing a powerful approach to improve traffic efficiency and safety. A very well-known example of CAD is
platooning. However, when extending this one-dimensional application to two-dimensional maneuvering,
covering a large number of traffic scenarios while also including safety threats imposed by other traffic or fail-
ing components of the automation system, a complex control system architecture may arise. To address this
challenge, an agent-based control system architecture is proposed employing explicit decision making. This
architecture is scalable with respect to the number of traffic scenarios that can be handled, capable of including
safety features, and provides the flexibility to adopt various controller design approaches at the same time.
1 INTRODUCTION
In recent years, autonomous driving has gained in-
creasing attention in the public press and in the sci-
entific community. Traffic safety is the primary driver
for this development, but also other motivations ex-
ists, such as more effective use of the traveling time
and reducing the dependency on manpower.
Autonomous vehicles, however, do not intrin-
sically improve traffic since they optimize towards
reaching their own goals. Cooperative driving, on the
other hand, aims for optimizing the collective behav-
ior, thus improving the traffic system. Connectivity is
instrumental for cooperative driving because it allows
traffic participants to share their intention easily and
precisely (de La Fortelle et al., 2014). When com-
bined with automation, a powerful approach arises to
improve traffic safety and efficiency.
A well-known application of cooperative auto-
mated driving (CAD) is cooperative adaptive cruise
control (CACC) or platooning, which improves traffic
throughput by adopting short intervehicle distances
(Ploeg et al., 2014). This is particularly of interest
in an automated transit network (ATN), i.e., a system
of automated people movers for first-/last-mile public
transportation, in view of transport capacity. Truck
platooning is another promising application because
a
https://orcid.org/0000-0001-8332-5860
of the reduced aerodynamic drag at short distances
(Alam et al., 2015).
Next to ongoing developments in the field of pla-
tooning, cooperative automated maneuvering attracts
attention to an increasing extent, acknowledging the
fact that traffic is not a string of vehicles. Many ap-
proaches are still investigated in this field. One such
approach relies on explicit decision making, which
was illustrated by i-GAME (Ploeg et al., 2018), a
European-funded project. Other projects, such as Au-
toNet2030, adopt an optimization-based approach for
path planning (Qian et al., 2016). A serious chal-
lenge for cooperative automated maneuvering, how-
ever, is posed by the fact that road traffic involves
a large number of different scenarios, which are not
likely to be handled by a single integrated approach.
Moreover, next to nominal behavior, also safety mea-
sures come into play to handle failing system compo-
nents or emergency situations imposed by other traf-
fic. This paper addresses this challenge by present-
ing a generic control architecture for CAD using an
agent-based approach, which intends to be scalable in
the sense that all possible traffic scenarios can be in-
corporated without leading to a complicated control
system architecture while also being capable of in-
cluding safety-related features.
The next section first presents a brief summary of
developments in controller design for platooning and
the emerging field of cooperative automated maneu-
Ploeg, J. and de Haan, R.
Cooperative Automated Driving: From Platooning to Maneuvering.
DOI: 10.5220/0008346300050010
In Proceedings of the 5th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2019), pages 5-10
ISBN: 978-989-758-374-2
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
5
i ‒ 1
i
i + 1
u
i ‒ 1
u
i
v
i
d
i
v
i ‒ 1
v
i + 1
d
i + 1
u
i ‒ 2
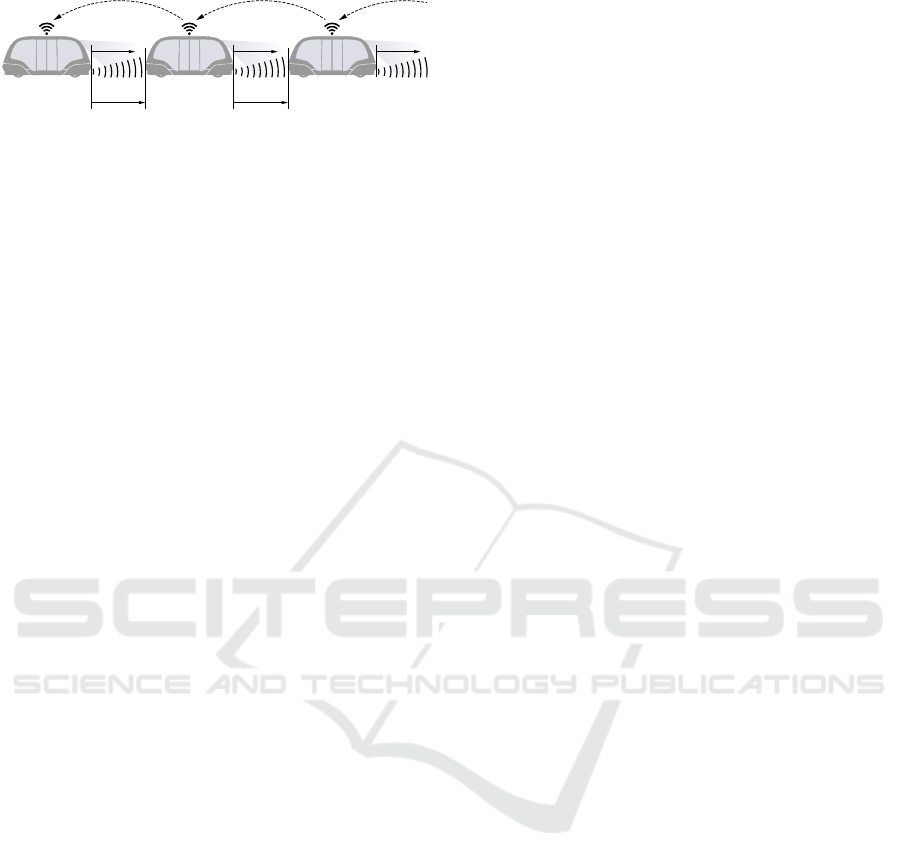
Figure 1: Platoon of ATN vehicles.
vering. Next, Section 3 focuses on safety of CAD.
Section 4 proposes a generic control architecture after
which the main results are summarized in Section 5.
2 COOPERATIVE AUTOMATED
DRIVING
A very well-known CAD application, focusing on
longitudinal automation, is vehicle platooning, the
main aspects of which will be briefly summarized in
Section 2.1. When also taking lateral vehicle motion
into account, the concept of platooning needs to be
extended towards cooperative automated maneuver-
ing, an example of which is presented in Section 2.2.
2.1 Platooning
An example platooning set-up is depicted in Fig. 1,
where v
i
is the speed of the vehicle with index i
and d
i
is the intervehicle distance between vehicle
i and the downstream (forward) vehicle i − 1. The
main control objective is to regulate d
i
to a desired
value d
r,i
, to which end, in this example, a one-
vehicle look-ahead communication topology is em-
ployed next to on-board sensors, such as forward-
looking radar and/or camera, to measure the interve-
hicle distance and the range rate. Note that the pla-
tooning controller is known as cooperative adaptive
cruise control (CACC), since it can be viewed as an
extension of adaptive cruise control (ACC) with wire-
less vehicle-to-vehicle (V2V) communications.
An important requirement for platooning is known
as string stability (Ploeg et al., 2014), i.e., the attenu-
ation of the effects of disturbances along the string
in upstream direction. This requirement is usually
formalized by requiring that the L
2
signal norm (en-
ergy) or the L
∞
signal norm (amplitude) of the ve-
locity v
i
or acceleration a
i
does not amplify for in-
creasing i. Adopting a constant time-gap spacing pol-
icy, i.e., d
r,i
(t) = r + hv
i
(t) at time t, where r is the
standstill distance and h the time gap, is beneficial for
string-stable platoon behavior. In this case, a mini-
mum time gap h
min
exists above which string stability
can be guaranteed. But to also obtain string stability at
short intervehicle distances (h ≈ 0.3 s), wireless V2V
communication is required. In the example of Fig. 1,
taken from (Ploeg et al., 2014), the input u
i
(desired
acceleration) of vehicle i is communicated to the up-
stream vehicle i + 1, which can lead to string stable
time gaps as low as h
min
= 0.24 s. Since u
i
cannot be
measured by the on-board sensors of the downstream
vehicle, it must be communicated, hence the need for
wireless V2V communication.
Many platooning controllers have been proposed
in literature, see (Ploeg et al., 2014) and the references
contained therein, some of them employing more
complex communication topologies or even varying
topologies (Santini et al., 2019). Despite this vast
amount of literature, however, some challenges still
remain, among which the control of heterogeneous
vehicle platoons and, even more important, the de-
sign of safety measures in the case of, e.g., sudden
packet loss of the V2V link. Nevertheless, traffic is
certainly not limited to platooning scenarios, which is
why the field of CAD is extended towards cooperative
automated maneuvering, as illustrated next.
2.2 Maneuvering
Automated crossing of an intersection without traf-
fic lights is a good example of cooperative automated
maneuvering. This particular application received
quite some attention in literature, see, e.g., (Morales
Medina et al., 2018). In this section, however, we fo-
cus on another example that is very illustrative for the
upcoming architecture proposal, being a highway lane
reduction, involving zipping of two vehicle platoons,
as presented earlier in (Ploeg et al., 2018).
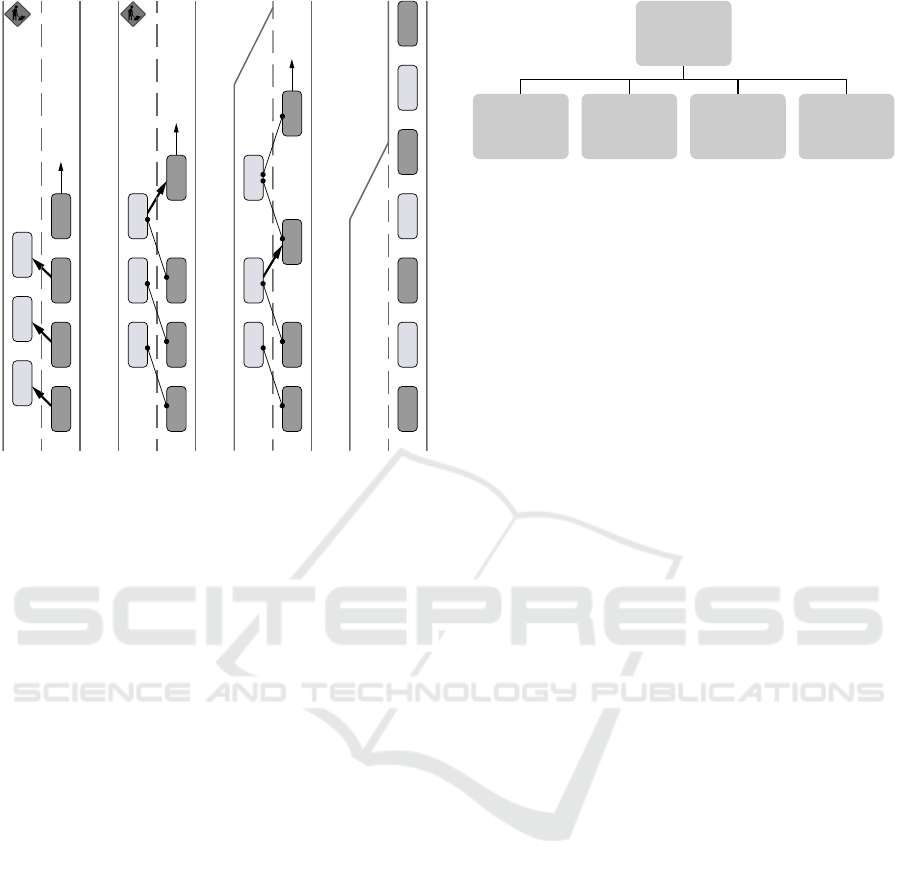
Consider a platoon L on the left lane, with mem-
bers L
i
, i = 1, . . . , m, and a platoon R with members
R
j
, j = 1, . . . , n, on the right lane, as illustrated in
Fig. 2 for m = 3 and n = 4. The lane-reduction sce-
nario can then be solved by the following sequence of
maneuvers, initiated by an interaction protocol that is
implemented through wireless V2V communications.
1. Pair-up R2L — The first phase entails sending
merge requests by the vehicles in L to the ones
in R. Next, each vehicle R
j
finds an appropriate
merging partner L
i
to merge in front of R
j
, thus
creating pairs {L
i
, R
j
} using a V2V handshaking
mechanism. The actual maneuver is that the vehi-
cles in R slow down to create an appropriate dis-
tance towards their merging partner in L, which is
implemented by R
j
activating a CACC controller
with L
i
as target vehicle. Since it may also happen
that the preceding in-lane vehicle R
j−1
brakes for
some reason, vehicle R
j
also activates a ‘separa-
tion controller’, guaranteeing a certain minimum
distance towards R
j−1
. This procedure is executed
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
6
R
1
R
2
R
3
R
4
R
1
R
2
R
3
R
4
R
1
R
2
R
3
R
4
L
3
L
2
L
1
L
1
L
3
L
2
L
3
L
2
L
1
R
4
R
3
R
2
L
3
L
2
L
1
R
1
L R
Pair-up R2L Pair-up L2R Gap ready Merged
L R L R L R
Figure 2: Phases of the lane-reduction scenario.
for all vehicles simultaneously.
2. Pair-up L2R — In the next phase, the same type
of procedure is followed but in opposite direction:
Each vehicle L
i
finds a appropriate merging part-
ner in R, which usually will be R
j−1
given the pair
{L
i
, R
j
} from the previous phase, and activates its
CACC controller with R
j−1
as target, while also
executing a separation controller with L
i−1
as tar-
get vehicle. This procedure, however, is executed
sequentially in upstream direction to prevent large
decelerations of the vehicles in the tail of the pla-
toon due to the gap-making maneuver.
3. Gap ready — When the gap is large enough, vehi-
cle R
j
signals its pair L
i
that it is allowed to initiate
the actual merge maneuver. Only when vehicle L
i
starts to change lanes, phase 2 is initiated for the
next vehicle L
i+1
.
From the above description, it is clear that this ap-
proach is based on explicit decision making, driven by
the interaction protocol, which initiates a maneuver
sequence. Each maneuver is executed by one or more
controllers which have a simple objective, such as
regulating a desired distance or a minimum distance,
or making a lane change. Note that other approaches
exist that do not rely on explicit decision making, such
as the Model Predictive Control approach presented
in (Qian et al., 2016). This would, however, require
all vehicles to have the exact same type of controller,
which might not be feasible given the fact that there
are various vehicle manufacturers.
Operational
safety
Functional
safety
(ISO 26262)
SOTIF
(ISO/PAS
21448)
Behavioral
safety
(emerging)
Best practices
(guidelines,
experience)
Figure 3: Aspects of operational safety.
Until now, only nominal behavior has been con-
sidered. In case of practical deployment, however,
also safety comes into play, as explained next.
3 ROAD SAFETY
Practical deployment of CAD applications requires
a structured approach to road safety. This section
briefly summarizes some important types of safety
and presents relevant threats in the scope of platoon-
ing, thereby motivating that additional vehicle con-
trollers are required to ensure safe behavior.
3.1 Standardization
Operational safety, which is used here as an umbrella
term for all types of safety, involves both ‘safety of
the intended functionality’ (SOTIF) and functional
safety, as depicted in Fig. 3. Here, SOTIF refers to
the ability of the system to correctly comprehend the
environmental situation and respond safely by activat-
ing appropriate countermeasures. SOTIF is recently
standardized as ISO 21448 (ISO/PAS 21448, 2019).
Functional safety, on the other hand, is the absence
of unreasonable risk due to hazards caused by mal-
functioning behavior of subsystems of the automated
vehicle, as standardized in the notorious ISO 26262
(ISO 26262-1, 2018). It should be mentioned that
ISO 26262 actually does not cover fully automated
road vehicles. Instead, this standard is limited to par-
tial automation, as implemented by advanced driver
assistance systems (ADAS), among which ACC.
Next to SOTIF and functional safety, also the no-
tion of behavioral safety has been recently introduced
as “an aspect of system safety that focuses on how
a system should behave normally in its environment
to avoid hazards and reduce the risk of mishaps”
(Waymo, 2017). Behavioral safety thus refers to
whether the programmed response of an automated
vehicle to common traffic situations is safe.
Finally, best practices are still important for the
development of automated vehicles, mainly due to the
limited scope of ISO 26262.
Cooperative Automated Driving: From Platooning to Maneuvering
7

Table 1: Platoon-specific threats in the scope of ‘safety of
the intended functionality’ (SOTIF).
ID Threat Countermeasure
SO1 Emergency
brake of
equipped
vehicle
No specific countermeasure is
required in this case, provided the
platoon is string stable.
SO2 Intermittent
V2V packet
loss
Graceful degradation — Upon
exceeding a packet loss threshold,
a smooth switch from CACC to
ACC is performed, while increas-
ing the following distance to a
safe and string stable value.
SO3 Unequipped
in-lane vehicle
Graceful degradation — The
same countermeasure as in SO2
applies.
SO4 Emergency
brake of
unequipped
in-lane vehicle
Fail safety — A collision avoid-
ance mechanism must be acti-
vated while messaging all up-
stream platoon members, allow-
ing those to respond in a timely
manner.
SO5 Cut-in/-
through of
unequipped
vehicle
Graceful degradation — In most
cases, this threat requires a similar
response as in SO3; However,
if the alien vehicle significantly
decelerates at the same time, a
fail safety mechanism must be
activated, as in SO4.
3.2 CAD Safety Threats
SOTIF and functional safety are the main types of
safety to take into account when developing CAD
systems since these are standardized. This section
lists common threats, related to SOTIF and functional
safety, for CAD systems in general and platoons in
particular. To this end, Table 1 first summarizes some
important threats in the scope of SOTIF. In this table,
an ‘equipped vehicle’ refers to an automated vehicle
with wireless communication capability.
As can be clearly seen from this table, all listed
threats relate to dangerous situations imposed by
other traffic (SO1 and S03–SO5) or to inherent limi-
tations of the automated vehicle’s environmental per-
ception sensor suite, in particular the V2V commu-
nication (SO2). In other words, SOTIF encompasses
threats that inherently exist under normal conditions
while driving in mixed traffic.
Functional safety exclusively focuses on compo-
nent failures. Some important failures, particularly
related to platooning, are listed in Table 2. This con-
cerns persistent packet loss of the V2X communi-
cation system (as compared to ‘normal’ packet loss,
which is covered by SOTIF). Malfunctioning behav-
ior of on-board environmental sensors is also consid-
ered, assuming that failure of the environmental per-
Table 2: Platoon-specific failures in the scope of functional
safety.
ID Failure Countermeasure
FS1 Persistent V2V
packet loss
Graceful degradation — With
the on-board EPS still fully func-
tional, V2V failure is counter-
acted by smoothly switching from
CACC to ACC, including increase
of the following distance to regain
safety and string stability.
FS2 EPS failure Fail safety — It is technically pos-
sible but unsafe to continue pla-
tooning using V2V only, because
unequipped vehicles or other ob-
jects can no longer be detected.
Therefore, EPS failure triggers a
collision avoidance mechanism as
the default fail-safety measure.
FS3 Failure of
preceding
equipped
vehicle
Fail safety — This is a combina-
tion of an emergency stop of the
preceding vehicle and FS1, which
can only be treated as a fail-safety
situation (collision avoidance)
while messaging all upstream pla-
toon vehicles, allowing those to
respond in a timely manner.
ception system (EPS) can be detected, either directly
or through comparison with redundant on-board sen-
sors. Finally, an equipped vehicle may be subject to
a major failure, due to which the vehicle performs an
emergency stop and, at the same time, all systems are
shut down, among which the wireless communication
system. The latter type of threat is particularly rele-
vant for platoons of people movers, which typically
perform an emergency stop when essential systems
exhibit malfunctioning behavior.
Both table Table 1 and Table 2 also show possi-
ble countermeasures for each threat or failure, cate-
gorized as either graceful degradation or fail safety.
Consequently, in addition to the nominal controllers
mentioned in Section 2, controllers are needed for fail
safety, e.g., a collision-avoidance controller, and for
graceful degradation. An example of the latter is au-
tomatically reverting from CACC to ACC while in-
creasing the intervehicle distance in the case of per-
sistent V2V packet loss.
4 CONTROL SYSTEM
ARCHITECTURE
Section 2 concerned controller design for nominal be-
havior, whereas Section 3 touched upon non-nominal
situations. To automatically control vehicles that col-
laboratively execute various traffic scenarios under
both nominal and non-nominal conditions, a layered
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
8
Coordination layer
Navigation layer
Motion control layer
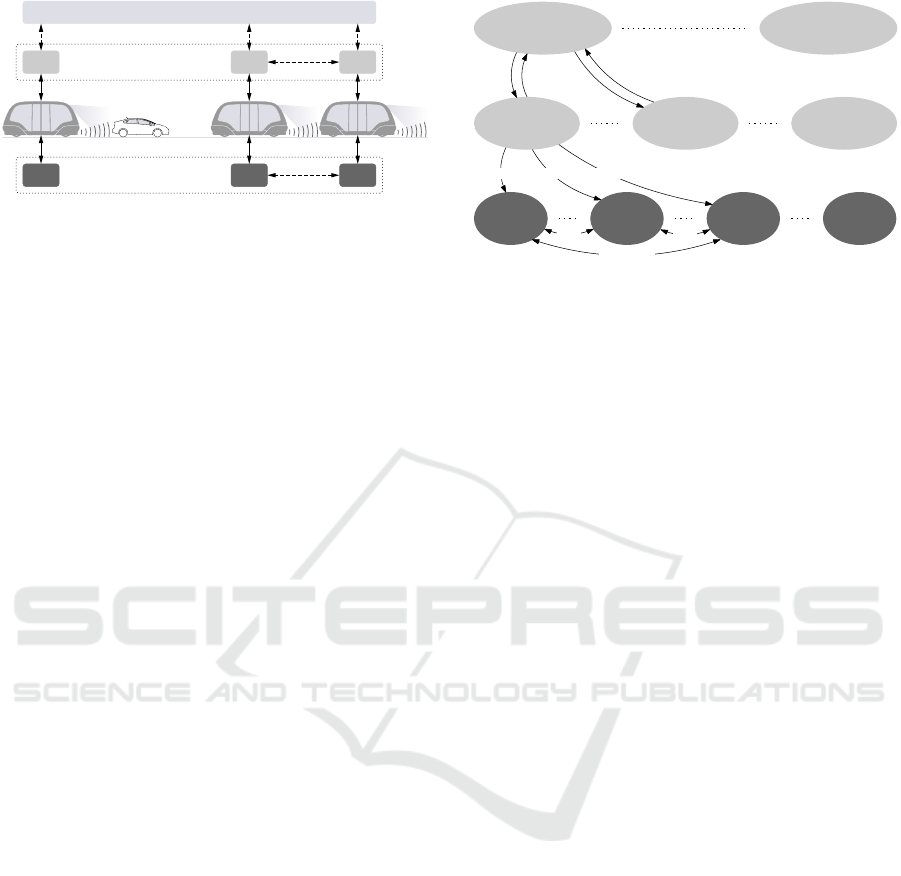
Figure 4: Layered architecture of CAD systems (dashed ar-
rows indicate information exchange through wireless com-
munications; the white vehicle is unequipped).
control system architecture is proposed, inspired by
(Horowitz and Varaiya, 2000), among others.
4.1 A Layered Software Architecture
Three main control levels can be distinguished in the
scope of CAD, as summarized below and visualized
in Fig. 4.
• The centralized navigation layer is responsible for
scheduling and routing, taking into account fuel
consumption and travel time, among others. In
case of truck platooning, this layer primarily in-
volves logistics, whereas in the case of ATNs, it
would focus on fleet control while also keeping
track of vehicle status and maintenance schedules.
• The intermediate coordination layer is responsi-
ble for coordination among the vehicles in a coop-
erative maneuver. This layer may exclusively in-
volve decision making, hence executing the afore-
mentioned interaction protocol, but may also act
as a higher-level feedback control loop. An ex-
ample of the latter is presented in (Zegers et al.,
2017), concerning the design of a mechanism to
guarantee platoon coherency subject to velocity
constraints. This layer’s implementation should
be distributed to support the distributed nature of
many traffic maneuvers.
• At the individual vehicle level, the motion con-
trol layer performs the actual real-time control of
the automated vehicle in order to execute the re-
quired maneuvers. Consequently, this layer in-
volves controllers for longitudinal vehicle motion,
e.g., (C)ACC, and lateral motion, such as lane
keeping.
This control system hierarchy is very similar to
the three levels commonly distinguished for the hu-
man driving task (Michon, 1985), being the strategic
level, the tactical level, and the operational level, re-
spectively, which were the terms used in (Ploeg et al.,
2018). The main motivation for this layered architec-
ture is twofold: First, it supports the explicit inclusion
scenario 1:
maneuver sequencing
maneuver 1:
agent activation
maneuver m:
agent activation
maneuver M :
agent activation
scenario N :
maneuver sequencing
1
ready
2
ready
agent 1:
control
agent i:
control
agent j:
control
agent K:
control
activate
activate
activate
neg.
neg.
negotiate
Figure 5: The coordination layer (light gray) and the mo-
tion control layer (dark grey) in an agent-based control ap-
proach.
of interaction protocols, and second, in the motion
control layer, there is freedom to adopt various con-
troller design approaches. The latter is particularly
relevant in view of the different road vehicle brands.
4.2 Agent-based Control
To further detail the proposed architecture, in par-
ticular the coordination layer and the motion control
layer, one could think of road traffic as a set of sce-
narios. Each scenario is built from (a sequence of)
maneuvers, which are executed by one or more con-
trollers, or agents, having a simple objective such as
speed control, distance control, etc.. If more than one
agent is required to execute the maneuver, the agents
can ‘negotiate’ among each other about which one ac-
tually controls the vehicle motion.
Taking this simple road traffic ontology as a basis,
the coordination layer is then responsible for execu-
tion of a scenario by subsequently activating the re-
quired maneuvers. Each maneuver, in turn, is imple-
mented by one or more agents for the longitudinal and
lateral vehicle motion. This agent-based control ap-
proach, which has the advantage of being flexible and
computationally non-demanding (Jennings and Buss-
mann, 2003), is depicted in Fig. 5. Note that this
approach is very similar to that of hybrid automata
(Huang et al., 2019).
Consider the lane-reduction scenario as discussed
in Section 2.2 to illustrate this concept. This scenario
requires the right-lane vehicles to make a gap for the
left-lane vehicles, i.e., a gap-making maneuver. Next,
the left-lane vehicles need to perform a lane-change
maneuver, and the scenario ends with all vehicles on
the right lane performing a vehicle-following ‘maneu-
ver’. The sequence of these maneuvers is controlled
by the interaction protocol, which runs in the coordi-
nation layer. The gap-making maneuver entails two
control objectives: realizing a desired distance to-
Cooperative Automated Driving: From Platooning to Maneuvering
9

wards the merging vehicle, while guaranteeing a min-
imum distance towards the preceding in-lane vehicle.
Hence, two agents are involved in executing this ma-
neuver: a CACC agent to regulate the distance to-
wards the merging vehicle, and a separation agent to
guarantee a minimum distance towards the preceding
in-lane vehicle. The lane change is performed by a
lane-change agent, while the final vehicle-following
situation is realized through the CACC agents of all
vehicles. Negotiation among agents takes place dur-
ing the gap-making maneuver, since the separation
agent must have priority above the CACC agent in
case the preceding in-lane vehicle brakes; likewise,
the CACC agent has priority if the preceding in-lane
vehicle decides to accelerate for some reason.
During all maneuvers, it may be required to also
activate a collision avoidance agent as a fail safety
measure, capable of performing an emergency stop in
case dangerous situations occur during the scenario
execution, thus overruling other active agents. In ad-
dition, an ACC agent might take over from the CACC
agents in case of packet loss, thus implementing a
graceful degradation measure.
5 CONCLUSION
It was argued that cooperative automated driving re-
gards road traffic as a system instead of individual
vehicles, thus having the potential to improve traf-
fic efficiency and safety. Platooning is a well-known
example in this field, but must be extended in two
directions: First, to cover multiple traffic scenarios,
one-dimensional platooning must evolve into two-
dimensional maneuvering and second, practical de-
ployment requires inclusion of safety measures. To
this end, a software architecture for the control sys-
tem was proposed utilizing an agent-based approach.
This architecture will be implemented in the near fu-
ture to realize cooperative behavior in a fleet of people
movers.
REFERENCES
Alam, A., Besselink, B., Turri, V., M
˚
artensson, J., and Jo-
hansson, K. H. (2015). Heavy-duty vehicle platooning
for sustainable freight transportation: A cooperative
method to enhance safety and efficiency. IEEE Con-
trol Systems Magazine, 35(6):34–56.
de La Fortelle, A., Qian, X., Diemer, S., Gr
´
egoire, J.,
Moutarde, F., Bonnabel, S., Marjovi, A., Martinoli,
A., Llatser, I., Festag, A., and Sj
¨
oberg, K. (2014).
Network of automated vehicles: The AutoNet 2030
vision. In Proceedings of the 21st World Congress on
Intelligent Transport Systems.
Horowitz, R. and Varaiya, P. (2000). Control design of an
automated highway system. Proceedings of the IEEE,
88(7):913–925.
Huang, Z., Chu, D., Wu, C., and He, Y. (2019). Path plan-
ning and cooperative control for automated vehicle
platoon using hybrid automata. IEEE Transactions on
Intelligent Transportation Systems, 20(3):959–974.
ISO 26262-1 (2018). Road vehicles – Functional safety –
Part 1: Vocabulary. Technical report, International Or-
ganization for Standardization, Geneva, Switzerland.
ISO/PAS 21448 (2019). Road vehicles – Safety of the in-
tended functionality. Technical report, International
Organization for Standardization, Geneva, Switzer-
land.
Jennings, N. R. and Bussmann, S. (2003). Agent-based
control systems: Why are they suited to engineering
complex systems? IEEE Control Systems Magazine,
23(3):61–73.
Michon, J. A. (1985). A critical view of driver behavior
models: What do we know, what should we do? In
Evans, L. and Schwing, R. C., editors, Human Be-
havior and Traffic Safety, pages 485–520. Springer,
Boston, MA.
Morales Medina, A. I., van de Wouw, N., and Nijmeijer,
H. (2018). Cooperative intersection control based on
virtual platooning. IEEE Transactions on Intelligent
Transportation Systems, 19(6):1727–1740.
Ploeg, J., Semsar-Kazerooni, E., Morales Medina, A. I., de
Jongh, J. F. C. M., van de Sluis, J., Voronov, A., En-
glund, C., Bril, R. J., Salunkhe, H., Arr
´
ue, A., Ru-
ano, A., Garc
´
ıa-Sol, L., van Nunen, E., and van de
Wouw, N. (2018). Cooperative automated maneuver-
ing at the 2016 Grand Cooperative Driving Challenge.
IEEE Transactions on Intelligent Transportation Sys-
tems, 19(4):1213–1226.
Ploeg, J., van de Wouw, N., and Nijmeijer, H. (2014). L
p
string stability of cascaded systems: Application to
vehicle platooning. IEEE Transactions on Control
Systems Technology, 22(2):786–793.
Qian, X., de La Fortelle, A., and Moutarde, F. (2016). A
hierarchical Model Predictive Control framework for
on-road formation control of autonomous vehicles.
In Proceedings of the 2016 IEEE Intelligent Vehicles
Symposium, pages 376–381.
Santini, S., Salvi, A., Valente, A. S., Pescap
`
e, A., Segata,
M., and Cigno, R. L. (2019). Platooning maneuvers
in vehicular networks: A distributed and consensus-
based approach. IEEE Transactions on Intelligent Ve-
hicles, 4(1):59–72.
Waymo (2017). On the road to fully self-driving: Waymo
safety report.
Zegers, J. C., Semsar-Kazerooni, E., Fusco, M., and Ploeg,
J. (2017). A multi-layer control approach to truck pla-
tooning: Platoon cohesion subject to dynamical limi-
tations. In Proceedings of the 5th IEEE International
Conference on Models and Technologies for Intelli-
gent Transportation Systems, pages 128–133.
VEHITS 2019 - 5th International Conference on Vehicle Technology and Intelligent Transport Systems
10
