
Vehicle Network Node Behavior Classification based on Optimized
Bayesian Classifier
Jijin Wang
1, a
, Xiaoqiang Xiao
1, b
and Peng Lu
1, c
1
College of Computer, National University of Defense Technology, Changsha 470001, China
Keywords: Bayesian Classification; Optimization; Trust Value; VANET; Behavior Classification.
Abstract: Vehicle Ad-hoc Network (VANET) is a special type of mobile Ad hoc network. It has a high-speed and
dynamic topological structure, which is limited by single path planning and buildings, random density
distribution of network nodes, intermittent interruption of wireless transmission, shadow effect and other
obstacles. In VANET, trust value of vehicle nodes has always been a problem of special concern to
researchers, and also a key problem in research field of VANET. Accurate calculation of trust value of
vehicle nodes can reduce the damage of traffic order by malicious nodes and avoid traffic accidents due to
the transmission of wrong information. Trust value of Nodes computation depends on the own behavior and
experiences of vehicles, and also depends on detection of neighbor nodes. Suggested that the behavior of the
vehicle in VANET can be accurately classified by Bayesian classifier, provides the accurate basis for the
node trust value computation, promote to develop in the direction of more security and stability of VANET
field.
1 INTRODUCTION
Vehicle Ad-hoc Network (VANET) is a special
network architecture composed of vehicle-mounted
unit (OBU) and roadside facility (RSU). It connects
with cellular network, WI-FI and terrestrial wireless
devices through wireless data transmission, and then
sends them to mobile management center through
public network. VANET is a special type of mobile
Ad hoc network, which has a high-speed and
dynamic topological structure and is limited by
single path planning and buildings, random density
distribution of network nodes, intermittent
interruption of wireless transmission, shadow effect
and other obstacles. In recent years, the proposal of
smart city has drawn more attention to VANET. For
users, the most important function of VANET is by
improving the traffic flow to reduce the probability
of accident, and to improve the traffic flow is
through the provide the right information to the
driver or vehicle, but for real-time information
changes or delay may lead to the vehicle-mounted
system error, finally brings to the driver and
passenger safety hidden trouble. In VANET, we use
wireless communication, and it is very difficult to
protect the safety of this type of communication.
However, the information spread in VANET
involves the life safety of drivers and passengers,
which may bring immeasurable losses due to the
tampering of a location message or accident
message. In the present study phase, by studying the
vehicle on-board network related scholars node trust
value computation mechanism, according to the
vehicle's own experience, neighbor node information
feedback, TA (Trusted Authority) node's assessment
of the security properties parameters, such as
classifying the behavior of the node, and then based
on the behavior of nodes in the number of honest
behavior and honest behavior node trust value
computation, judging by the node trust value of node
sends out the truth of news. At present, the existing
classification method is based on naive Bayes
classification. In this paper, through the optimization
of naive Bayes, node behavior classification is more
efficient.
2 RELATED WORK
Based on the current attack mode of the vehicle-
mounted network, we dig out a series of security
attribute parameters (K1, K2, K3,...), for example:
Wang, J., Xiao, X. and Lu, P.
Vehicle Network Node Behavior Classification based on Optimized Bayesian Classifier.
DOI: 10.5220/0008386200050009
In Proceedings of 5th International Conference on Vehicle, Mechanical and Electrical Engineering (ICVMEE 2019), pages 5-9
ISBN: 978-989-758-412-1
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
5

the garbage rate of the information sent by the node,
the integrity of the information sent by the node, the
ratio of the node speed to the speed of the current
section, etc. Through the statistics of existing attack
modes and attack characteristics, we can get a priori
data set, each node Vi (K1, K2, K3,...) corresponds
to one or more behavior types (A, B, C, D...,A
—
,B
—
,...),
where A is honest behavior and A
—
is non-honest
behavior (aggressive behavior), α is the count of
honest behavior, and β is the count of non-honest
behavior. Beta distribution is used to describe the Vi
trust distribution of the current node, and the trust
distribution of node Vi can Be expressed as Ri-Be
(αi,βi).Beta distribution refers to a group of
continuous distributions defined in the interval (0,1),
which is a commonly used fitting distribution model
in Bayesian theory (B. Coppin, 2004).Where,
parameters α and β are both greater than zero, and
the probability fitting of uncertain events determined
by the two variables can be carried out by adjusting
the values of alpha and beta. In trust management,
the trust space is defined in the interval [0, 1]. α and
β are defined as variables associated with the normal
behavior and abnormal behavior of the evaluation
object. Honest behavior and non-honest behavior of
vehicle nodes meet the basic conditions of Beta
distribution and can be fitted. The trust distribution
Ri follows the Beta distribution of parameters α and
β, denoted as Ri ~ Be (α, β).The probability density
function of Beta distribution is:
1-
i
1-
ii
r-1r
,
1
,;Rf
)(
)(
)(
B
(1)
Type, Ri (0, 1),α > 0, β > 0.
When α <1, Ri≠0; β <1, Ri ≠ 1.The expected
value of its probability density function can be
expressed as:
)(
i
RE
(2)
That is, the trust evaluation value of node Oi is
3 THE OPTIMIZATION OF
NAIVE BAYESIAN
CLASSIFICATION
Classification is a common method of machine
learning and data mining. Depending on the number
of target classifications used to categorize data sets,
different methods can be selected to perform the
classification. For binary classification, decision tree
and support vector machine are usually adopted, but
they are limited by the number of target
classification not exceeding two. This strict
constraint makes them difficult to generalize to fit
the broad meaning of the actual classification work,
where the number of target classifications is usually
more than two. From the point of view of obtaining
general toolbox, naive Bayes classifier is more
suitable for general classification expectation. A
variety of successful practical applications based on
naive Bayesian classifier, such as weather
forecasting service, customer credit assessment,
health status classification, etc. Simply preprocess
the format of the data sets in the problem domain to
tabular format. This mathematical classifier can
continue to calculate the validity of fitting a new
piece of data into each possible classification. In this
way, the classification with the highest fitness value
can be selected as the most suitable classification for
this data. Naive Bayes classifier is a probability
classification mechanism based on Bayes' theorem,
which is the last word theory of Thomas Bayes (T.
Bayes, 1763; J. Tabak, 2004). From a classification
perspective, the main goal is to find the best
mapping between a new piece of data and a set of
classifications in a particular problem domain. In
order to make this mapping probabilistic, some
mathematical operations are carried out to convert
the joint probability into the product of prior
probability and conditional probability. As a method
of machine learning and data mining, this
mathematical transformation is a bit unnatural and
may be difficult for beginners to understand,
because it turns a simple division into a long list of
molecules divided by a long list of denominators.
However, these unnatural transformations are
necessary because prior probabilities and conditional
probabilities can be easily summarized from a given
data set by simply calculating the number of
instances with or without given conditions (F. Yang,
2016, Hasrouny H , Samhat A E , Bassil C , et al,
2017).The classifier considers the given problem
domain composed of n attributes and m attributes,
and calculates the attribute vector (A1,
ICVMEE 2019 - 5th International Conference on Vehicle, Mechanical and Electrical Engineering
6

A2,...,An)And a set of categories (C1,
C2,...,Cn).Given the validity of attribute vector
fitting, (A1 = k1, A2 = k2..., An = kn), and the
posterior probability is calculated by Bayesian
reasoning to obtain classification Ci:
)A...A(A
)()|)A...A(A(
)A...A(A
))A...Ak(A(
)A...A(A
))A...A(A(
))A...Ak(A|(
2211
2211
2211
2211
2211
2211
2211
nn
iinn
nn
inn
nn
nni
nni
kkkP
CPCkkkP
kkkP
CkkP
kkkP
kkkCP
kkCP
(3)
Type: 1 < i < m
After this series of probability calculation, the
fitness value between the given attribute vector and
the possible classification can be expressed
quantitatively. When the naive Bayesian
classification is applied to the behavior classification
of vehicle nodes, it is necessary to convert the value
of safety attribute parameters into 0/1 (for example,
when the speed attribute is overspeed, it is 1 and not
0 when it is not overspeed) or regional value. In this
way, it is more effective in attribute vector fitting
(
Wu qi-wu, liu qing-zi; 2015; R.S. Raw, M. Kumar,
2013; Li Q, Malip A, Marin K, et a1, 2012).
In equation (1), the calculation of
)|)A...A(A(
2211 inn
CkkkP
is
very complicated and greatly increases the
computational complexity of such classification. In
real life, a hypothesis is usually made to reduce the
computational complexity, that is, assume that each
attribute parameter is independent of each other, and
in the vehicle-mounted network, each safety
attribute parameter of the vehicle node is
independent of each other, and then the following
transformation can be carried out (F. Yang, 2017):
)()|A(...)|A|(A
)|)A...A(A(
2211
2211
iinnii
inn
CPCkPCkPCkP
CkkkP
()
(4)
Type: 1 < i < m
Therefore, the posterior probability can be
simplified to:
)A...A(A
)()|A(...|A|(A
)A...A(A
)()|)A...A(A(
)A...A(A
))A...A(A(
)A...A(A
))A...A(A(
))A...A(A|(
2211
2211
2211
2211
2211
2211
2211
2211
2211
nn
iinnii
nn
iinn
nn
inn
nn
nni
nni
kkkP
CPCkPCkPCkP
kkkP
CPCkkkP
kkkP
CkkkP
kkkP
kkkCP
kkkCP
)()
(5)
Type: 1 < i < m
Since all the posteriori probabilities have the
same denominator in their calculations, for
comparative purposes, you can remove the
denominator from the fraction just by calculating
and comparing the numerator. So mapping a given
property vector (A1 = k1; A2 = k2,...,An = kn
)which has its validity to a classification Ci can be
further simplified as:
)()|A(...)|A|(A
2211 iinnii
CPCkPCkPCkP
()
(6)
Type: 1 < i < m
After calculating all the validity, the highest
validity shows the best mapping between the
attribute vector and its best fitting classification.
When the vehicle node behavior classification is
applied, threshold Cij is set for different attack
types. If the threshold value is exceeded, the
behavior belongs to this kind of attack behavior,
adding a dishonest behavior; on the contrary, if the
threshold value is not exceeded, adding an honest
behavior (
Wu qi-wu, liu qing-zi; 2015).
4 TEST RESULTS OF VEHICLE
NODE BEHAVIOR
CLASSIFICATION
In order to test the improved classifier, we selected
an example from an artificial intelligence book to
verify and ensure the mathematical correctness of
the improved classifier. The selected data set is
shown in table 1, in which each section of data is
composed of attributes k1, k2, k3, k4, and k5, where
the value of k1-k5 is an integer within the range of 0
to 4, and the available categories are C1, C2,C3,
1C
,
2C
,
3C
.
Vehicle Network Node Behavior Classification based on Optimized Bayesian Classifier
7
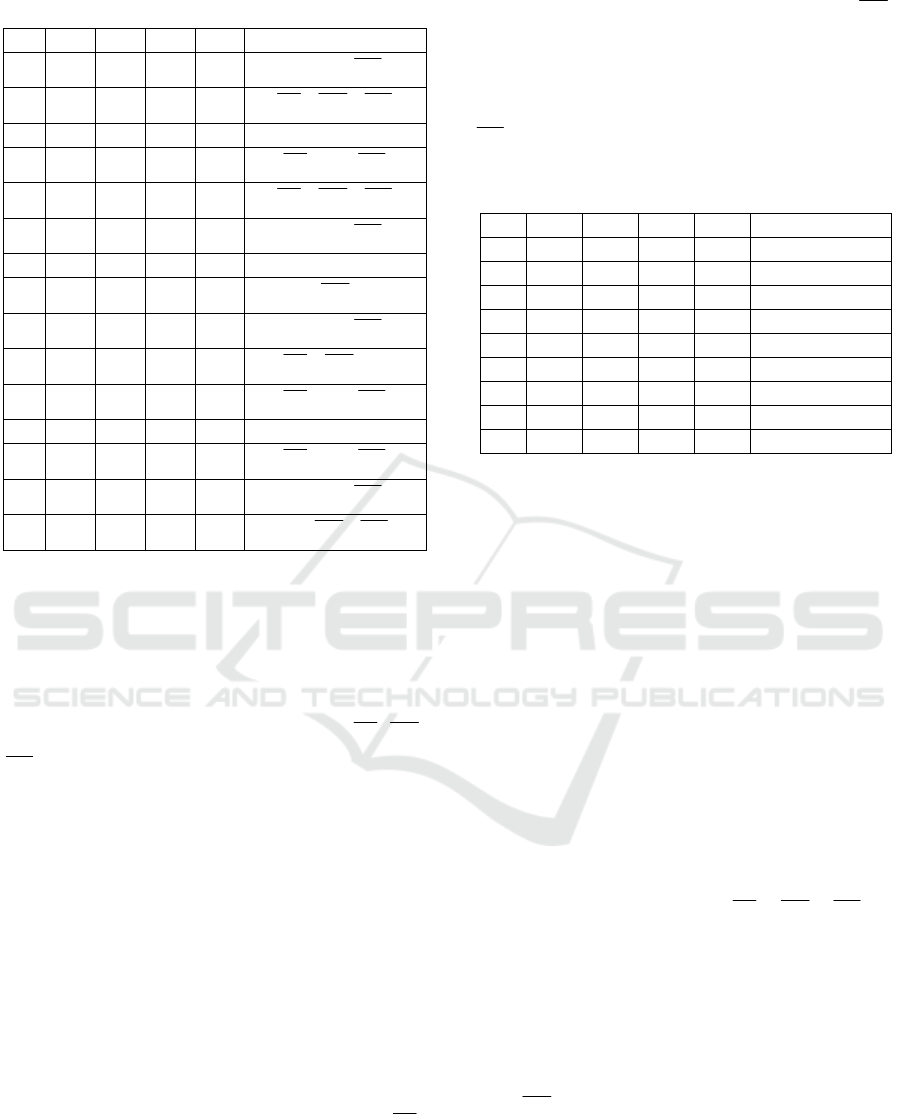
Table 1. Prior data sets.
k1 K2 K3 K4 K5 Classification
0 1 3 0 1
C1, C2,
3C
1 2 1 0 1
1C
,
2C
,
3C
0 0 0 4 1 C1, C2, C3
1 3 1 0 2
1C
, C2,
3C
1 0 2 0 4
1C
,
2C
,
3C
0 1 2 4 4
C1, C2,
3C
2 0 1 4 3 C1, C2, C3
2 3 3 1 1
C1,
2C
, C3
2 4 4 0 2
C1, C2,
3C
2 2 1 1 0
1C
,
2C
, C3
0 1 3 4 1
1C
, C2,
3C
1 2 3 1 4 C1, C2, C3
4 1 0 1 2
1C
, C2,
3C
1 2 0 1 4
C1, C2,
3C
3 0 1 2 2
C1,
2C
,
3C
To find the best classification for a given new
data (k1=1, k2=0, k3=3, k4=1, k5=4), prior
probabilities and conditional probabilities must be
derived so that they can be applied to the above
probability calculations in equations (1) and
(4).Based on the data in table 1, the prior
probabilities of classification C1, C2, C3,
1C
,
2C
,
3C
and are respectively:
Among the 45 sample data, 9 belong to C1 class.
Since no specific attribute values are checked, the
prior probability of C1 class is 9/45, that is, P (C1) =
9/45.Of the 45 sample data,
Among the 45 sample data, 10 belong to C2
class. Since no specific attribute values are checked,
the prior probability of C2 class is 10/45, that is, P
(C2) = 10/45.
Among the 45 sample data, 5 belong to C3 class.
Since no specific attribute values are checked, the
prior probability of C3 class is 5/45, that is, P (C3) =
5/45.
Among the 45 sample data, 6 belong to the class.
Since no specific attribute values are checked, the
prior probability of the class is 6/45, that is, P (
1C
)
= 6/45.
Among the 45 sample data, 5 belong to the class.
Since no specific attribute values are checked, the
prior probability of the class is 5/45, that is, P (
2C
)
= 5/45.
Among the 45 sample data, 10 belong to the
class. Since no specific attribute values are checked,
the prior probability of the class is 10/45, that is, P (
3C
) = 10/45.
Table 2. Classify subset data for C1.
K1 K2 K3 K4 K5 Classification
0 1 3 0 1 C1
0 0 0 4 1 C1
0 1 2 4 4 C1
2 0 1 4 3 C1
2 3 3 1 1 C1
2 4 4 0 2 C1
1 2 3 1 4 C1
1 2 0 1 4 C1
3 0 1 2 2 C1
Among the 9 sample data belonging to C1 class,
2 of them have k1=1.In the case of C1 classification,
the probability of k1=1 is 2/9., P (k1=1|C1) = 2/9;
Among the 9 sample data belonging to C1 class,
3 have k2 =0.K2 is equal to 0 with a probability of
3/9 in C1 classification.K2 = 0, |, C1 = 3/9;
Among the 9 sample data belonging to C1 class,
3 have k3=3.The probability that k3 is equal to 3,
given the C1 classification, is 3/9. P (k3= 3|C1) =
3/9;
Among the 9 sample data belonging to C1 class,
3 have k4=1.The probability that k4 is equal to 1 is
3/9 in the case of C1 classification. P (k4= 1|C1) =
3/9;
Among the 9 sample data belonging to C1 class,
2 have k5=4.The probability that k5 is equal to 4 is
3/9 in the case of C1 classification, P (k5= 4|C1) =
3/9;
For classification C2, C3,
1C
,
2C
,
3C
and
respectively according to the prior probability
calculation method of C1 classification, the
respective results can be obtained through python
programming.
Through the comparison of the five validity
degrees, it is concluded that the best fitting
classification of k1=1, k2=0, k3=3, k4=1, k5=4 is
(C1,
2C
, C3).However, after removing the
denominator from the posterior probability
calculation, these three values no longer represent
probabilities. They are simply to support the relative
comparison, the extent to which a given block of
data is suitable for every possible classification.
ICVMEE 2019 - 5th International Conference on Vehicle, Mechanical and Electrical Engineering
8

Fig 1. The result of the experiment.
Experimental results show that the optimized
Bayesian classifier reduces the time complexity of
probability calculation, and the calculation results
are more accurate for node behavior judgment.
Through the behavior classification, we can find
that this node has two honest behaviors and one
dishonest behavior, which can provide basis for the
next step to calculate the trust value of this node.
5 SUMMARY
Optimization of Bayesian classifier is greatly
reduced the time on the probability calculation
complexity, reduced the amount of writing test code,
to be able to rely on a priori data set to determine the
current node behavior, the behavior of the node
classification more accurate and intuitive to car, for
the node trust value computation provides effective
basis, to solve the problem of on-board network
traffic node trust value computation, the next step is
to rely on the trust value is calculated in this paper,
the behavior of the classification results, and the
node trust value of high and low used in vehicle
network in all kinds of agreement, to provide
reliable basis for the next hop node selection.
REFERENCES
B. Coppin,”Artificial Intelligence Illuminated, MA: Jones
and Bartlett Publishers Inc., USA, 2004, pp. 352-353.
F. Yang, ”A General Purpose Probabilistic Inference
Engine,” IAENG Transactions on Engineering
Sciences - Special Issue for the International
Association of Engineers Conferences 2016,
Singapore: World Scientific, 2017, pp. 33-44.
F. Yang,” Crafting a Lightweight Bayesian Inference
Engine,” Proceedings of The World Congress on
Engineering (WCE 2016), Vol. II, London, UK, 2016,
pp. 612-617.
Hasrouny H, Samhat A E, Bassil C, et al. VAN et security
challenges and solutions: A survey [J]. Vehicular
Communications, 2017, 7:7-20.
J. Tabak,”Probability and Statistics: The Science of
Uncertainty,” NY: Facts on File, Inc., USA, 2004, pp.
46-50.
Li Q, Malip A, Marin K, et a1. A reputation - based
announcement scheme for VANETs [J]. IEEE
Transactions on Vehicular Technology, 2012, 61(9):
4095—4108.
R.S. Raw, M. Kumar, N. Singh, “Security Challenges,
issues and their solutions for VANET”, published in
International Journal of Network Security & Its
Applications (IJNSA), September 2013, Vol.5, No. 5.
T. Bayes,”An Essay Towards Solving a Problem in the
Doctrine of Chances,” Philosophical Transactions of
the Royal Society, Volume 53, Issue 1, 1763, pp. 370-
418.
Wu qi-wu, liu qing-zi. VANET secure routing trust model
based on Bayesian theory [J]. Journal of Sichuan
university (engineering science edition), 2015, 47(2).
Vehicle Network Node Behavior Classification based on Optimized Bayesian Classifier
9
