
Buried Object Detection based on Acousto-seismic Method using
Accelerometer and Neural Network
Setyabudi
1
, Muhammad Rivai
1
and Ronny Mardiyanto
1
1
Department of Electrical Engineering, Institut Teknologi Sepuluh Nopember, Surabaya, Indonesia
Keywords:
Accelerometer, Acousto-Seismic Method, Buried Objects, Neural Network.
Abstract:
A system for detecting buried objects is often needed for inspection, exploration and security purposes. This
research has developed a system to detect buried objects based on the acousto-seismic principle. A sinusoidal
signal is amplified by an audio amplifier to drive a subwoofer speaker to produce mechanical vibrations. The
seismic vibrations propagating in the ground are measured by an accelerometer. The Fast Fourier Transform
method converts vibrations in the time domain to the frequency domain. Neural Network algorithm is applied
to distinguish these wave spectrums to determine buried objects. After testing in experiments, this system can
distinguish between buried metal and non-metal objects. This system could also recognize the shallow buried
objects with an accuracy rate of 86.6%. This method can be potentially developed to detect land mines both
metal and non-metal materials.
1 INTRODUCTION
Buried object detections are often needed as an in-
spection and security machine. Metal detectors can
detect objects within a certain distance both on the
surface and inside the ground. Buried landmines with
metal casings are often found in fields which can be
dangerous to humans or animals around them. Metal
detectors are generally only able to detect metal ob-
jects. In fact, many dangerous objects are covered by
non-metal materials.
Several methods are applied to inspect buried ob-
jects. Radar-based noncontact displacement sensors
can be used to detect buried landmines using seis-
mic wave excitation (Martin et al., 2001). This sys-
tem explores the elasticity characteristics of objects
towards their environment. Detection of landmines
can be carried out by capturing gamma rays emit-
ted by hydrogen and nitrogen contained in the ex-
plosives (Yoshiyuki et al., 2007). The position of
the buried object can be localized by the pendu-
lum method to measure its acceleration (Maqsud and
Daku, 2005). An acousto-seismic method has also
been implemented in which buried objects have spe-
cific seismic (Rayleigh) wave responses in the time
and frequency domains (Bulletti et al., 2010). Detec-
tion of land mines based on Time Reverse Acoustics
can significantly improve the accuracy of the results
(Sutin et al., 2005). The inspections of buried objects
typically use low frequency mechanical vibrations of
5-100 Hz (Song et al., 2017).
In this research, a system has been designed
and developed to detect buried objects based on the
acousto-seismic method. Seismic vibration is gen-
erated by an acoustic signal produced by a sub-
woofer. The vibration that propagate on the ground
is measured using micro-electro-mechanical systems
(MEMS) accelerometers. Fast Fourier Transform
(FFT) method converts vibrations in the time domain
to the frequency domain. Neural Network algorithm
will recognize the frequency spectrum pattern of the
vibration in order to determine the buried object.
252
Setyabudi, ., Rivai, M. and Mardiyanto, R.
Buried Object Detection based on Acousto-seismic Method using Accelerometer and Neural Network.
DOI: 10.5220/0009882202520257
In Proceedings of the 2nd International Conference on Applied Science, Engineering and Social Sciences (ICASESS 2019), pages 252-257
ISBN: 978-989-758-452-7
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 MATERIALS AND METHOD
The overall system of detection for buried objects is
illustrated by Figure 1. This prototype is a wooden
box with a size of 60cmx60cmx10cm containing 30
kg of sand. The 60 hertz sinusoidal signal is amplified
by an audio amplifier to drive a 12-inch subwoofer
speaker to produce mechanical vibrations of 125 dB.
The subwoofer is located in a wooden box with a size
of 60cmx45cmx100cm mounted on sand with a dis-
tance of 30 cm, as shown in Figure 2. The objects
used in this study consisted of metal and non-metal
objects buried 10 cm deep in sand including iron, alu-
minum, zinc, stainless steel, plastic, polyvinyl chlo-
ride (PVC), and acrylic, as shown in Figure 3.
Figure 1: The overall system of detection for buried objects.
Figure 2: The layout of the buried object detection.
Figure 3: The buried objects used for the experiments.
space
Figure 4: The architecture of switching power amplifier
(Kova
ˇ
cevi
´
c et al., 2018)
Figure 5: The MDL-049 TPA3116D2 amplifier module.
Class-D or switching power amplifier has a high
power efficiency of more than 90% (Kova
ˇ
cevi
´
c et al.,
2018). This type of amplifier uses the Pulse Width
Modulation (PWM) method as depicted in Figure 4.
In this study, we use the MDL-049 TPA3116D2 sub-
woofer amplifier module as shown in Figure 5. This
amplifier is a stereo digital amplifier that can drive
speakers by 50 W per channel. This module is con-
figured as a mono amplifier that can produce a power
of 100 W to a 4 Ω speaker with the Bridge-Tied-Load
method.
Figure 6: The working principle of MEMS accelerometer
(John, 2011)
Figure 7: The neuron model.
Accelerometer is a sensor that can measure
changes in speed. MEMS accelerometer is often used
in many applications because of their compact size
for three-dimensional space. This sensor can be used
Buried Object Detection based on Acousto-seismic Method using Accelerometer and Neural Network
253

to measure vibrations that propagate on the ground or
objects (Ardiansyah et al., 2018). The working princi-
ple of this sensor is based on changes in capacitance
shown in Figure 6. The output voltage of the proof
mass can be expressed as:
V
x
=
X
d
V
0
(1)
where x is the distance between the two plates
of the internal capacitor, d is the change in distance
between the plates, V
0
is the amplitude of the exci-
tation voltage. By involving spring force, the out-
put voltage will be proportional to the acceleration.
In this study, the seismic vibrations are measured by
ADXL335 analog accelerometer. This sensor oper-
ates at the voltage of 1.8–3.6V and the current con-
sumption of 350µ. This device has a bandwidth of
around 0.5-1600 hertz. The sensor signal is then dig-
itized using an Arduino Nano microcontroller board.
The FFT method converts the signal in the time
domain into a frequency domain. This frequency
spectrum feature is often used for the identification of
sounds produced by vibrating objects (Winjaya et al.,
2017). Compared with Discrete Fourier Transform
(DFT), the FFT has fewer total number of complex
multiplies of (N/2) 2log (N) with N is the number of
signal samples. In general, Fourier transform can be
expressed as:
x[k] =
n−1
∑
n=0
x[n]W
kn
n
(2)
W
kn
n
= e
− j2πkn/N
(3)
where x [n] is a discrete signal in time domain,
and x [k] is the frequency spectrum. In this study,
the range of frequency spectrum is between 0-99 hertz
with a step of 1 hertz. This spectrum is used as input
for the Neural Network to recognize the vibrations.
Figure 8: The Neural Network architecture used in the ex-
periment.
Neural Network is a computational model inspired
by human brain. The human brain has many neurons
that are connected to each other. Figure 7 shows the
model of a neuron cell. Using the logistic sigmoid
function, a neuron model can be expressed by:
Z
j
= Σ
3
i
(W
j,i
X
1
+ b
j
) (4)
O
j
=
1
1 + e
−az j
(5)
Neural Networks are widely used as artificial in-
telligence to identify patterns (Rivai and Tasripan,
2015), (Rivai et al., 2016), (Rivai et al., 2014). The
Neural Network architecture used in this study is
shown in Figure 8. The input layer consists of 100
nodes that correspond to the frequency spectrum of
the acousto-seismic vibrations. The hidden layer con-
sists of three layers, each of which consists of 500,
100, and 50 neurons. Meanwhile, the 2 neurons in the
output layer represent the number of classes that will
be recognized. The learning and running phases are
accomplished by a computer using Python Program-
ming Language.
3 RESULT AND DISCUSSIONS
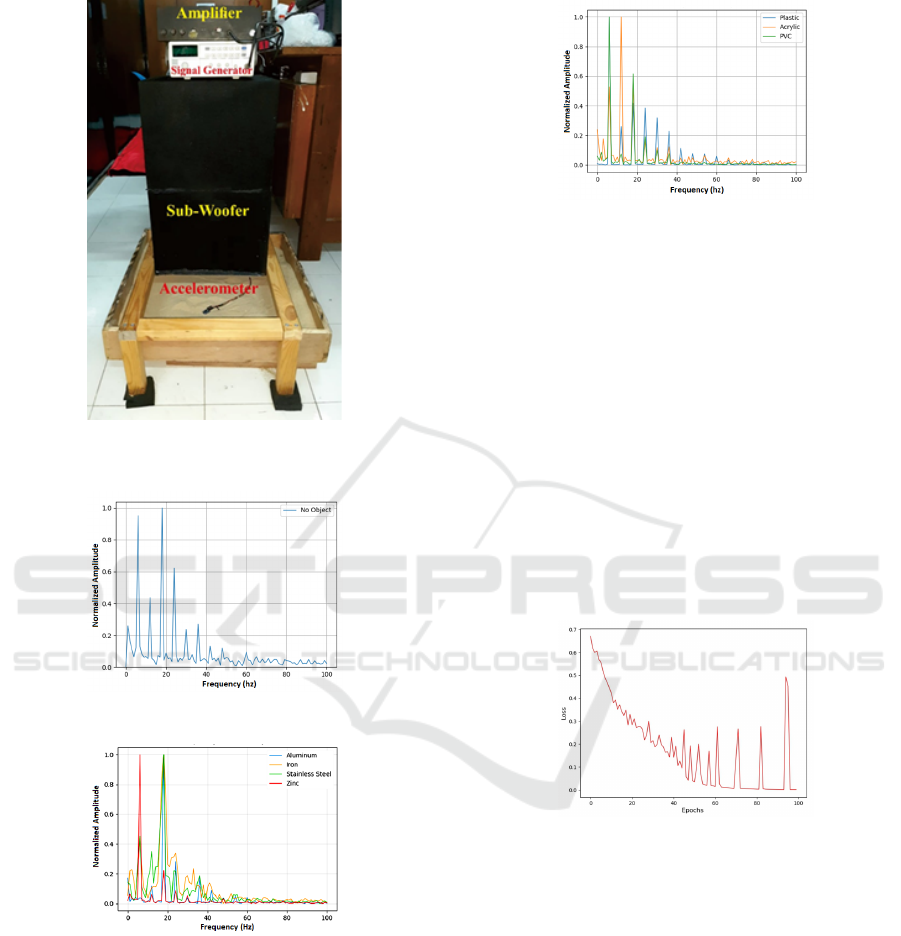
The prototype of the system for detecting buried ob-
jects is shown in Figure 9. The experimental results
of the frequency response without buried object is
shown in Figure 10. Whereas, the frequency spec-
trum for buried metal and non-metal objects can be
seen in Figure 11, and Figure 12, respectively. Band-
width spectrum of buried objects is wider than that
of without objects. There are also significant differ-
ences between the spectrum patterns of buried metal
and non-metal objects.
The next experiment is the detection of buried
metal and nonmetal objects using the Neural Net-
work. In the training phase, the network uses pairs
between 120 spectrum patterns of all metal objects for
different positions and targets (Y1 = 1 and Y2 = 0), as
well as pairs between 90 spectrum patterns of all non-
metal objects for different positions and targets (Y1 =
0 and Y2 = 1).
ICASESS 2019 - International Conference on Applied Science, Engineering and Social Science
254
space
Figure 9: The prototype of the buried object detection sys-
tem.
Figure 10: The spectrum of vibration without buried object.
Figure 11: The spectrum of vibration with buried metal ob-
jects.
This training phase loss curve is shown in Figure
13. In the running phase, 35 spectrum patterns are
tested online as shown in Table 1. The experimen-
tal results indicate that Neural Network could classify
buried metal and non-metal objects with an identifi-
cation level of 77%.
space
Figure 12: The spectrum of vibration with buried non-metal
objects.
The next experiment is the detection of with and
without buried objects. In the training phase, the net-
work uses pairs between 100 spectrum patterns of
without objects and targets (Y1 = 1 and Y2 = 0), as
well as pairs between 210 spectrum patterns of all
both metal and non-metal objects for different posi-
tions and targets (Y1 = 0 and Y2 = 1). This training
phase loss curve is shown in Figure 14. In the run-
ning phase, 15 spectrum patterns are tested online as
shown in Table 2. The experimental results indicate
that Neural Network could determine the buried ob-
jects with a success rate of 86.6%. The similar results
are obtained when this system is applied to identify
buried objects for true field experiments, as shown in
Figure 15.
Figure 13: Loss curve of the Neural Network training phase
to detect buried metal and non-metal objects.
Buried Object Detection based on Acousto-seismic Method using Accelerometer and Neural Network
255

spacer
Figure 14: Neural Network identification for buried metal
and non-metal objects.
Figure 15: Loss curve of the Neural Network training phase
to detect buried objects.
space
Figure 16: Neural Network identification for buried objects.
Figure 17: True field experiments for buried object identifi-
cation
4 CONCLUSION
We have designed and realized a device to detect
buried objects based on the acousto-seismic method.
The 60 hertz sinusoidal signal is amplified by an audio
amplifier to drive a 12-inch subwoofer speaker to pro-
duce mechanical vibrations of 125 dB. The seismic
vibrations propagating in the ground are measured
by the ADXL335 MEMS accelerometer. The FFT
method converts vibrations in the time domain to the
frequency domain. The Neural Network algorithm is
applied to distinguish these wave spectrums to deter-
mine buried objects. The experimental results show
that this system can distinguish between buried metal
and non-metal objects with an identification rate of
77%. This system could also recognize the shallow
buried objects with a success rate of 86.6%
ICASESS 2019 - International Conference on Applied Science, Engineering and Social Science
256

REFERENCES
Ardiansyah, H., Rivai, M., and Nurabdi, L. (2018). Train
arrival warning system at railroad crossing using ac-
celerometer sensor and neural network. In AIP Con-
ference Proceedings, page 040029–1.
Bulletti, A., Borgioli, G., Calzolai, M., Capineri, L.,
and Mazzoni, M. (2010). Acoustoseismic method
for buried-object detection by means of surface-
acceleration measurements and audio facilities. IEEE
Trans. Geosci. Remote Sens, 48(8):3134.
John (2011). Mems accelerometer. http:
//www.instrumentationtoday.com/
mems-accelerometer/2011/08. [Online; Ac-
cessed 23-June-2019].
Kova
ˇ
cevi
´
c, S., Pe
ˇ
si
´
c-Brdjanin, T., and Gali
´
c, J. (2018).
Class d audio amplifier with reduced distortion. Int.
Symp. Ind. Electron. INDEL.
Maqsud, A. and Daku, B. (2005). Characterization of a
mems accelerometer for an underground mine posi-
tioning system. In Canadian Conference on Electrical
and Computer Engineering, page 2268.
Martin, J., Scott, W., and Larson, G. (2001). Experimen-
tal model for a seismic landmine detection system.
IEEE Transactions on Geoscience and Remote Sens-
ing, 39(6):1155.
Rivai, M., Arifin, A., and Agustin, E. (2016). Mixed vapour
identification using partition column-qcms and artifi-
cial neural network. In International Conference on
Information, Communication Technology and System,
page 172.
Rivai, M., Talakua, E., and L. (2014). The implementation
of preconcentrator in electronic nose system to iden-
tify low concentration of vapors using neural network
method. International Conference on Information,
Communication Technology and System, page 31.
Rivai, M. and Tasripan (2015). Fuel qualification using
quartz sensors. ARPN Journal of Engineering and Ap-
plied Sciences, 10(16):6737.
Song, K., Tong, S., Ding, Z., and Dong, L. (2017). An
electromagnetic feedback method to improve low-
frequency response performance of geophone. In
Proc. IEEE Sensors, page 5.
Sutin, A., Johnson, P., Tencate, J., and Sarvazyan, A.
(2005). Land mine detection by time reversal acousto-
seismic method time reversal acousto-seismic method
for land mine detection. In Proc. of Society of Photo-
Optical Instrumentation Engineers, page 706.
Winjaya, F., Rivai, M., and Purwanto, D. (2017). Identifi-
cation of cracking sound during coffee roasting using
neural network. International Seminar on Intelligent
Technology and Its Application, page 271.
Yoshiyuki, T., Tsuyushi, M., Cheol, H., Seiji, S., Kiyosi,
Y., Kai, M., and Teruhisa, T. (2007). Development
of landmine detection system using scintillators by
measuring radiations from landmine. IEEE Nucl. Sci.
Symp. Conf. Rec, page 273.
Buried Object Detection based on Acousto-seismic Method using Accelerometer and Neural Network
257
