
Data-driven Summarization of Broadcasted Cycling Races
by Automatic Team and Rider Recognition
Steven Verstockt
a
, Alec Van den broeck
b
, Brecht Van Vooren,
Simon De Smul and Jelle De Bock
c
IDLab, Ghent University-imec, Belgium
Keywords: Data-driven Summarization, Rider Recognition, Storytelling.
Abstract: The number of spectators for cycling races broadcasted on television is decreasing each year. More dynamic
and personalized reporting formats are needed to keep the viewer interested. In this paper, we propose a
methodology for data-driven summarization, which allows end-users to query for personalized stories of a
race, tailored to their needs (such as the length of the clip and the riders and/or teams that they are interested
in). The automatic summarization uses a combination of skeleton-based rider pose detection and pose-based
recognition algorithms of the team jerseys and rider faces/numbers. Evaluation on both cyclocross and road
cycling races show that there is certainly potential in this novel methodology.
1 INTRODUCTION
Over the last few years, a weakening public interest
is noticed to almost all cycling races. The ‘traditional’
cycling broadcast concept in which races are shown
from start to finish is losing popularity, especially
among the younger generations. Other sports face
similar problems as young fans drop out (Lombardo,
2017). More personalized and interactive experiences
are needed to keep the end user happy and get back
the youngsters. The data-driven summarization
mechanism proposed in this paper is a first step in this
direction. It allows to automatically create summaries
of a particular length, focusing on the events, riders
and/or teams of choice. In order to achieve this, fine-
grained metadata is needed for each video shot in the
broadcasted stream. Available sensor data (e.g.
provided by Velon or Strava) and video-based
recognition techniques are used to generate the
required metadata. This more detailed metadata is
also an added value for archiving and querying
purposes.
By improving the metadata collection and
indexing strategies broadcasters will, over time, also
be able to offer new services to teams, such as auto-
generated team stories (e.g., a video with the
a
https://orcid.org/0000-0003-1094-2184
b
https://orcid.org/0000-0002-3593-7851
c
https://orcid.org/0000-0002-1676-9813
highlights of a team in a particular race which can be
easily integrated in the team’s fan pages or social
media account) or providing stats about how much
the team or a particular rider was present/shown in the
live stream. The latter could, for example, be very
interesting for teams to negotiate new sponsor deals
or to analyze how active a rider was in a particular
race. Figure 1 shows an example of such stats that
were generated with the proposed methodology. As
can be seen, two teams dominated the broadcasted
final of the last 40km of the Classica San Sebastian
race in 2019. Finally, the fine-grained metadata can
also be used for training/coaching purposes to
optimize rider performance, adapt race strategies or
scout opponents.
The remainder of this paper is organized as
follows. Section 2 presents the related work on data-
driven analysis and summarization of sport videos.
Section 3 explains our data-driven summarization
methodology. Results of a Tour de France test and a
cyclocross race in Leuven are shown in Section 4.
Finally, Section 5 concludes the paper and points out
directions for future work.
Verstockt, S., Van den broeck, A., Van Vooren, B., De Smul, S. and De Bock, J.
Data-driven Summarization of Broadcasted Cycling Races by Automatic Team and Rider Recognition.
DOI: 10.5220/0010016900130021
In Proceedings of the 8th International Conference on Sport Sciences Research and Technology Support (icSPORTS 2020), pages 13-21
ISBN: 978-989-758-481-7
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
13

Figure 1: Classica San Sebastian 2019 - detected teams in
footage of last 40km.
2 RELATED WORK
The biggest problem that contemporary cycling races
are struggling with is that watching a race for multiple
hours can be boring and too time consuming. A
solution for this problem can possibly be found in the
area of highlight summarization, which has been an
active research topic over the last decade. Traditional
summarization methods (e.g. HMM based audio-
visual highlight detection as proposed by (Qian et al.,
2012) have been improved by recent deep learning-
based methods that, for example, focus on player
action related features to distinguish between
interesting/boring parts (Tejero-de-Pablos et al.,
2018). The accuracy of these techniques is still too
low (+- 75% f-score) and the metadata description is
at too high level to create summarizations targeted to
specific end-users/applications. Furthermore, these
solutions don’t tell us which rider is performing the
particular action, making it difficult to be used in the
proposed concept of personalized summaries.
Combining the player action data with rider
recognition and linking it to the available sensor data
will make it possible to generate the level of metadata
detail needed for this purpose.
2.1 Team and Rider Recognition
Related work on rider and team recognition in cycling
is rather scarce or not existing, i.e., we did not find
any hit in literature. However, in other sports like
basketball, soccer and football, several approaches
have been proposed over the last decade on how to
identify players.
The jersey number recognition proposed by (Liu and
Bhanu, 2019), for example, makes use of a Region-
based Convolutional Neural Network (R-CNN)
trained on persons/players and digits. Region
proposals are geometrically related and fed to an
additional classifier, ultimately generating jersey
number proposals. Some results of this approach are
shown in Figure 2. When a player is turned
backwards the recognition goes well, but in any other
orientation problems can occur, as shown in the last
two examples. Furthermore, for any frontal view this
approach will depend on the tracking of previous
detections. Tracking in sports videos, especially when
people are wearing similar sportswear and have a lot
of occlusions, is also error-prone.
Figure 2: Jersey number recognition results proposed in
(Liu and Bhanu, 2019).
In (Mahmood et al., 2015) an Adaboost based face
detection and recognition methodology, recognizing
baseball players in action, is presented. A
shortcoming of this algorithm is that it requires that
the detected players’ faces are frontal or near frontal.
Again, when the orientation of a player changes,
tracking issues can obfuscate the identification.
Broadcasted cycling videos continuously switch
between cameras and viewpoints, which makes
tracking even more difficult, i.e., none of the
previously mentioned solutions would give us
satisfying results. This is the main reason why we
decided to develop a pose-based methodology that
works on frontal, lateral and dorsal views, and tracks
riders within the same shot when no occlusions occur.
In case of occlusions, the tracking stops and the
icSPORTS 2020 - 8th International Conference on Sport Sciences Research and Technology Support
14

detection algorithm tries to resolve them. Based on
the pose and the type of shot, decisions between using
face recognition, jersey recognition and/or number
recognition are made, and available sensor data is
used to further filter or verify the set of possible
candidates, as explained in Section 3.
2.2 Cycling Sensor Data
Several third parties (such as Velon and Gracenote)
provide structured and very detailed live data of
sports events at a high frequency. Velon, for example,
provided location, heart rate, power, and speed of
each cyclist during several stages of Tirreno Adriatico
2019 and Gracenote provided exact location of each
group of riders during the Tour of Flanders 2019. If
such sensor data of the race is available, it is definitely
the most accurate and computationally most
interesting solution for geo-localization and event
detection. When there are multiple groups of riders,
however, an additional method (such as team or
cyclist recognition) is needed to know which
particular group is shown in the live video stream (as
is further discussed in Section 3).
If detailed sensor data were available, several
events can be detected in it, such as breakaways,
crashes, or difficult sectors (e.g. barriers and sandpits
in cyclocross or gravel segments in road cycling). For
the latter type of events, the approach of (Langer et al,
2020) for difficulty classification of mountainbike
downhill trails can, for example, be tailored to
cyclocross and road cycling segment classification.
The work of (Verstockt, 2014) also shows that this is
feasible. For breakaway/crash detection, experiments
revealed that simple spatio-temporal analysis across
all riders will already provide satisfying results.
TEAM & RIDER DETECTION
3.1 Skeleton and Pose Detection
The proposed team and rider detection methodology
both start from the output of a skeleton recognition
algorithm (such as OpenPose
1
, tf-pose
2
and
AlphaPose
3
). Figure 3 shows an example of the
skeleton detection (front and side view) of these
algorithms – tested in our lab set-up. In order to
measure the accuracy of each of the available pose
estimation libraries, tests were performed in which
ground truth annotations of the rider joints are
1
https://github.com/CMU-Perceptual-Computing-Lab/openpose
2
https://github.com/ildoonet/tf-pose-estimation
compared to the algorithms’ output. As can be seen in
the results shown in Figure 4, none of these skeleton
trackers is outperforming the others in all situations,
but AlphaPose and OpenPose are definitely
outperforming tf-pose. An evaluation on a dataset of
Tour de France footage with OpenPose also provided
satisfying results on the typical filming angles in
cycling live broadcasts.
Figure 3: Rider skeleton detection (lab set-up).
The skeleton detection is providing the keypoints,
i.e., the main joints of the rider’s body. From the
keypoint locations (i.e., pixel coordinates) we can
detect the pose and orientation of the rider. If the left
shoulder is left of the right shoulder, then it is most
likely to be a frontal shot. If the left shoulder is on the
right of the right shoulder, then the frame was most
likely shot from a rear perspective. Based on this
information, different techniques can be selected for
further identification. For instance, if we see a rider
from the back, face detection will not work, but a
combination of number and team recognition will
make it possible to detect the rider from that side. If
we have a frontal view of the rider, the number will
of course not be visible, but now the face recognition
algorithm can take over. If available, sensor data can
help to limit the number of candidate riders that can
be expected in a particular shot or frame.
In addition to detection of the orientation of the
rider, skeleton detection can also be used for shot type
classification. Based on the number of detected
skeletons and their size/location in the video footage,
a close-up shot can easily be distinguished from a
longshot or landscape view, as is shown in Figure 5.
Furthermore, scene changes can also be detected by
analysing the skeleton size/location changes over
time. As a result, we know exactly when it is safe to
start and stop tracking (if needed) and we can also
easily further crop the video into logical story units.
Finally, we also use the skeleton output to crop out
the faces and upper body regions of the riders – results
of this step are shown in Figure 6. In this way the and
3
https://github.com/MVIG-SJTU/AlphaPose
Data-driven Summarization of Broadcasted Cycling Races by Automatic Team and Rider Recognition
15
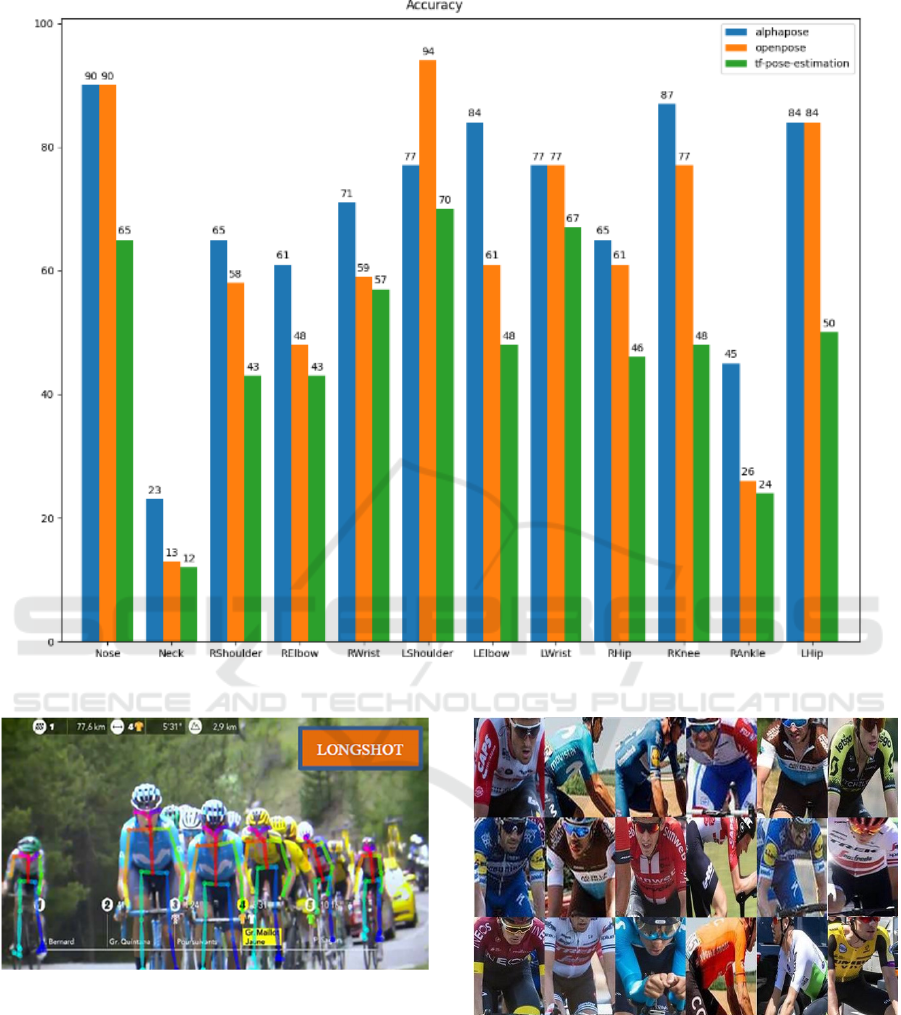
Figure 4: Accuracy of skeleton trackers for each of the rider’s joints.
Figure 5: Results of pose detection and shot type estimation
on a Tour de France 2019 broadcast.
accuracy of the next steps (face, number and team
recognition) is improved a lot as background noise
non-rider information (e.g. numbers/text of other
objects) are limited to the bare minimum.
Since the skeleton detection output is used in
several of our building blocks, its higher
computational cost is spread across all these steps,
making it a very interesting building block that can
Figure 6: Results of skeleton-based upper-body extraction.
probably be even further reused in other types of
automatic sports analysis.
3.2 Team Recognition
The proposed team recognition algorithm is based on
a CNN-powered sequential model that is developed
icSPORTS 2020 - 8th International Conference on Sport Sciences Research and Technology Support
16
with KERAS/Tensorflow
4
and trained on a dataset of
rider images from 18 UCI World Tour teams. The
CNN outputs a collection of class probabilities for
with KERAS/Tensorflow
5
and trained on a dataset of
rider images from 18 UCI World Tour teams. The
CNN outputs a collection of class probabilities for
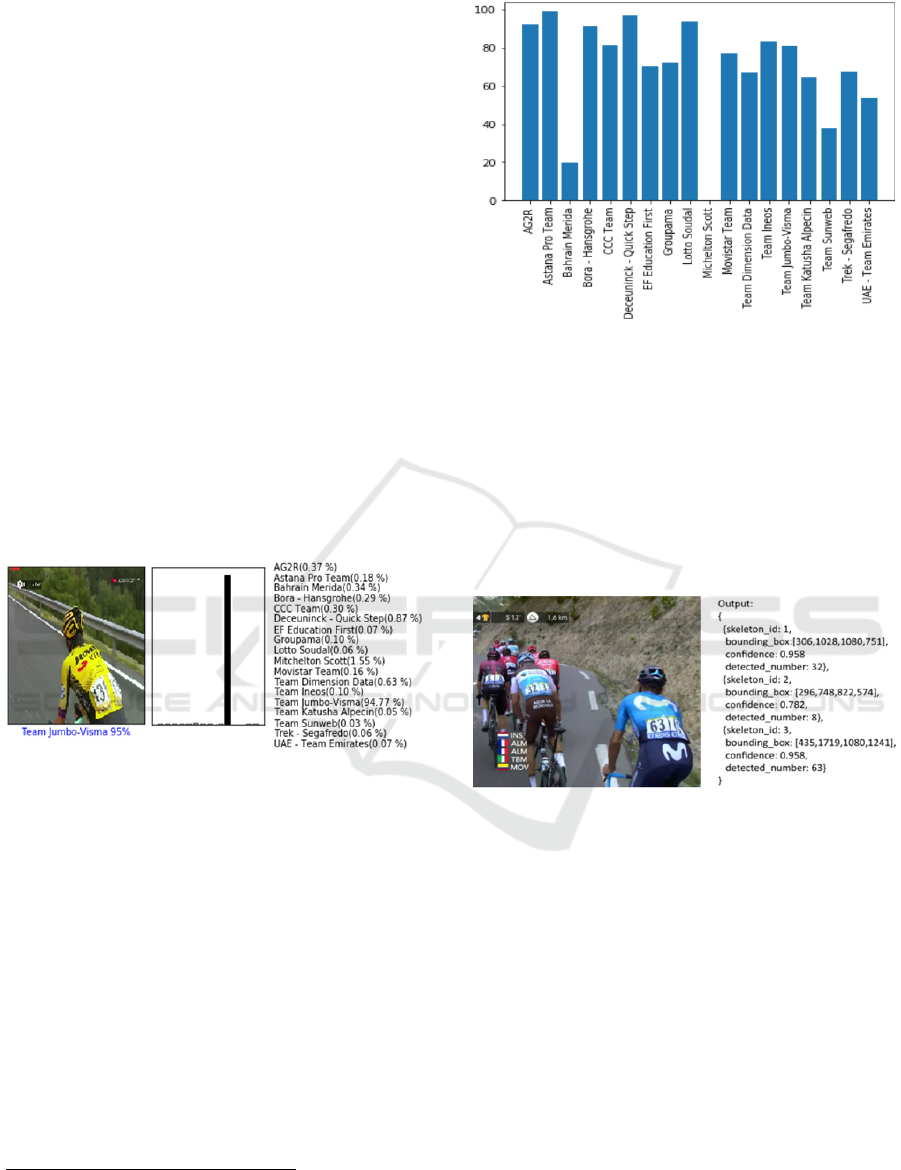
each rider upper body region, as shown in Figure 7 (in
this example the rider is recognized as being a
member of Team Jumbo-Visma with 94%). The
current accuracy of the model is approximately 80%,
however, the current dataset for training is still
limited. By extending the dataset (e.g. by data
augmentation or web scraping) and taking into
account additional information (e.g. text recognition
of team sponsors or jersey numbers) we should be
able to detect most team jerseys with high accuracy.
Furthermore, the current model does not take into
account the orientation of the rider. Future work will
also evaluate if a separate model for front, side and
rear views would further increase the accuracy of the
team recognition. Finally, based on the specific
accuracies for each team (shown in Figure 8) and the
confusion matrices that explain which teams are
swapped most frequently, we can further improve our
workflow in the future.
Figure 7: Results of team recognition algorithm.
3.3 Number Recognition
For both the dorsal and lateral view of riders we use
number recognition to identify the riders. Similar to
the team recognition, we start from the upper body
region of the rider, which is fed to the number
recognition module. Once a bib number is recognized
we can link it to the name of the rider using the race
contestant list. Important to mention is that this bib
recognition approach is immediately applicable to
other sports too.
The text extraction itself uses Microsoft Azure
6
,
which has state-of-the-art text detection and
recognition models. Azure offers an API that accepts
HTTP requests. For text extraction, two separate calls
4
https://www.tensorflow.org/api_docs/python/tf/keras
5
https://www.tensorflow.org/api_docs/python/tf/keras
6
https://docs.microsoft.com/en-us/azure/cognitive-service
s/computer-vision/concept-recognizing-text
Figure 8: Accuracy of team recognition for each team.
are required: one that supplies the images to Azure
and another that retrieves the text recognition results.
It is important to note that multiple calls can be made
asynchronously, allowing this pipeline element to be
multi-threaded. An example of the information
extracted by the text extraction module is shown in
Figure 9. The JSON output contains the detected
number, its bounding box, skeleton ID and
confidence score.
Figure 9: Results of number recognition algorithm.
The biggest downside of using Azure is the fact
that it is a pay-per-call service. The amount of calls to
the Azure servers per hour of video is 7200 times the
framerate of the video (if each frame should be
analysed). However, since subsequent frames are
correlated, we can limit the text analysis to a couple
of frames per second, which is still resulting in a lot
of calls to Azure’s services. As each call is billed
separately, the economical attractiveness of using
commercial text-recognition APIs is rather low.
Furthermore, Azure also produces better results the
higher the size of the text relative to the entire frame.
Accuracy would be at its highest, if we launch a call
for each upper body region instead of for each frame.
This, however, would even further increase the
amount of calls. Thus, a number of alternatives have
been explored.
Data-driven Summarization of Broadcasted Cycling Races by Automatic Team and Rider Recognition
17

A well-known text extraction alternative is
Tesseract Optical Character Recognition (OCR),
which is available as a Python library
7
. Tesseract,
however, was not able to detect the majority of the bib
numbers in our test sequences. Even after intensive
pre-processing/optimizing the images the library still
did not manage to extract the numbers. So it was
decided to abandon Tesseract as a candidate to
replace Azure.
Another promising OCR implementation, is that
of KerasOCR
8
which uses the CRAFT Character
Region Awareness model for Text Detection (Baek et
al., 2019) and the Keras CRNN model for text
recognition
9
. Some preliminary testing has already
shown that the KerasOCR model produces similar
results to those of Microsoft Azure, making it a viable
replacement option. The main limitation of
KerasOCR, however, is that it is even slower than
Azure. However, this could be solved by multi-
threading the text extraction module.
Once the text recognition module has detected the
bib numbers in the frame, they are mapped onto the
riders that were detected during the skeleton and pose
estimation. This mapping is done by verifying
whether the bib number is located on the back of a
skeleton. Once this mapping is completed, the bib
numbers are resolved based on the contestant info (as
discussed before). To keep track of the results
gathered by both the bib number resolver and face
recognition throughout a sequence, a shared
dictionary is used. This shared dictionary holds the
most likely label (the name of the rider in question)
and the confidence score of that label for each
skeleton ID. The main reason the dictionary is shared
is that the face recognition module and the bib
number resolver module share this data structure.
This means that when face recognition assigns a label
to a certain skeleton, this label can be corrected
afterwards by the bib number resolver. The shared
dictionary effectively allows both modules to correct
each other and work together rather than next to each
other.
3.4 Face Recognition
In order to recognize the riders in the live broadcasts
we first need to have a dataset with the faces of all
contestants. An automatic workflow was developed
to automatically create such a dataset based on the
7
https://pypi.org/project/pytesseract/
8
https://keras.io
9
https://github.com/kurapan/CRNN
10
https://github.com/ageitgey/face-recognition
Wikidata of the riders and their pictures on
Wikimedia Commons. To extract the faces from the
Wikimedia images (and from the broadcasted video
frames too) we use a face detection algorithm that
detects and encodes the faces and their facial features.
Based on these encodings, the recognition can then be
performed.
A number of different approaches to perform the
face detection exist. Histogram of Oriented Gradients
(HOG) based face detection (Cerna et al., 2013) is a
technique that remains popular due to its low
computational complexity. Although this detection
method performs quite well on perfectly frontal
images, it often fails when it is used to detect faces
shot in a non-frontal position. CNN-based face
detection is an alternative approach whose accuracy
has been shown to be less prone to skewed images
(Vikas, 2018). A Python version of the C++ library
dlib
10
contains such kind of face detector and is used
in our set-up. Furthermore, it also provides an
encoder for facial features in images and a face
landmark detection algorithm. The encodings can be
used to calculate distances between faces and thus
produce a metric to compare faces, while the
landmarks are useful to distinguish different face
expressions (e.g. suffering, nervousness or
concentration).
The face encoder from dlib is a CNN heavily
inspired by the ResNet34 architecture (He, 2016),
with a few layers removed and the number of filters
per layer halved. The model was trained on a
combination of several publicly available datasets
such as Facescrub and the VGG ones. A shortcoming
of the scraped images from WikiMedia Commons is
that some rider images also contain other people. To
resolve this problem and filter out faces that do not
belong to that specific rider, the pipeline applies face
clustering. Based on the assumption that the rider in
question will be represented more than any other
person, the largest cluster should correspond to the
rider’s encoded faces.
The recognition step compares the encoded faces
gathered during the initialization process with face
encodings extracted from the video frames. The
encoded face from the dataset with lowest distance is
selected as the detected rider. The used distance
metric is the norm of the difference of the 128 features
describing the face encodings. The documentation of
the face recognition library which produced the
encodings states that a distance lower than 0.6
indicates that the faces are belonging to the same
icSPORTS 2020 - 8th International Conference on Sport Sciences Research and Technology Support
18

Figure 10: Results of face recognition algorithm.
individual. However, based on our experiments, we
found that a threshold of 0.4 resulted in better
matching. The JSON output of the recognition step is
shown in Figure 10. For each detected rider it
contains the skeleton ID, rider name, and confidence
score.
The proposed face recognition still has some
issues due to the specific circumstances in which the
recognition needs to be performed. First of all,
contestants always wear helmets and often sunglasses
- both covering a part of their face and thus limiting
the amount of ‘visible’ face features. Second, cyclists
have the tendency to look downward, rather than
straight forward, which has a negative impact on
performance as well. Finally, the video quality is
sometimes rather low, which impacts the face
recognition significantly. However, for professional
broadcasts this should not be an issue, as the pipeline
should ultimately run on their raw footage, which has
sufficiently high quality. Furthermore, additional data
streams (such as GraceNote
11
data) could be used to
improve the recognition. GraceNote produces data
streams which give detailed, real-time information of
the state of the race. This includes information about
the different groups. This means that if there is a
group of two riders and the system only manages to
identify one, then the other rider can still be labelled.
Similarly, if the system identifies two riders in the
same frame, which are in different groups, it could re-
adjust its predictions.
4 RESULTS
The entire pipeline has been tested on both cyclocross
and Tour de France race footage. An example of the
cyclocross results are shown in Figure 11. Once riders
are detected, they are tracked by skeleton matching
between consecutive frames. In this example, all 5
riders are detected correctly. However, this is not
11
https://www.gracenote.com/scores-and-statistics/
always the case – i.e., we still get some errors in more
challenging sequences. Future work, as discussed in
the conclusions section, will focus on resolving them
by improving/extending some building blocks.
Figure 11: Cyclocross rider recognition.
As illustrated in Table 1, the text extraction and
bib number resolver modules are the major
bottlenecks for the proposed pipeline. A deeper
analysis of the problem reveals that there is a large
waiting time between the moment when the image is
posted to Microsoft Azure and when the results from
text extraction are available. Due to its single-
threaded nature, the system currently has to wait for
the results from Azure, before it can start processing
a new frame. By multi-threading this piece of the
pipeline, the process could be speeded up by a factor
of five, as nearly 90% of the current total processing
time of the text recognition module is spent actively
polling the results from Azure.
Table 1: Processing time of the individual building blocks.
5 CONCLUSIONS
This paper proposes a video processing system that
can be used to automatically annotate cycling race
broadcasts. Skeleton-based rider pose detection is
used to extract rider regions and analyse them with
the team, number and/or face recognition building
blocks. Evaluation on both cyclocross and road
Data-driven Summarization of Broadcasted Cycling Races by Automatic Team and Rider Recognition
19

cycling races show that there is certainly potential in
this novel methodology, however, improvement is
still possible.
Data augmentation could offer a possible solution
to combat some of the current face recognition
problems. Data augmentation is a machine learning
technique in which a data sample is transformed into
several versions, which should all typically be
labelled the same. By augmenting images from
WikiMedia Commons, for example, into versions
with and without glasses, the face recognition
algorithm should be able to recognize riders more
easily, regardless of the fact if a racer is wearing
glasses or not. To determine the location of the
glasses onto the face of the contestant, pose
estimation could be used to extract the location of the
eyes and ears of the participant. This process is
illustrated with an example in Figure 12.
Figure 12: Augmenting the face of a cyclist with glasses.
Another improvement could be switching to a
more advanced face recognition algorithm, such as
DeepFace
12
or FaceNet
13
. However, as these
algorithms are slower than our current dlib approach
and they would require some adjustments for real-
time processing. A final suggestion which could
improve the accuracy of the face recognition module,
would be to use a spatio-temporal face detection
model. The current model uses a frame-by-frame
approach, meaning it does not fully exploit the
temporal correlation between subsequent frames.
Finally, OCR-based recognition of sponsor
names, as shown in Figure 13, could definitely help
to further improve the team recognition and will be
investigated in future work too.
12
https://github.com/serengil/deepface
13
https://github.com/davidsandberg/facenet
Figure 13: OCR-based recognition of sponsor names.
ACKNOWLEDGEMENTS
This research is funded by the imec ICON project
DAIQUIRI (Agentschap Innoveren en Ondernemen
project nr. HBC.2019.0053).
REFERENCES
Lombardo, J., Broughton, D., 2017, Going gray: Sports TV
viewers skew older, Sports Business Journal (June 5
th
).
Qian, X., Wang, H., Liu, G., Hou., X., 2012, HMM based
soccer video event detection using enhanced mid-level
semantic, Multimedia Tools Appl. 60(1), 233-255.
Tejero-de-Pablos, A., Nakashima, Y., Sato, T., Yokoya, N.,
Linna, M. and Rahtu, E., 2018, Summarization of User-
icSPORTS 2020 - 8th International Conference on Sport Sciences Research and Technology Support
20

Generated Sports Video by Using Deep Action
Recognition Features, IEEE Transactions on
Multimedia, 20(8), pp. 2000-2011.
Liu, H., Bhanu, B., 2019. Pose-Guided R-CNN for Jersey
Number Recognition in Sports. The IEEE Conference
on Computer Vision and Pattern Recognition (CVPR)
Workshops.
Mahmood, Z., Ali, T., Khattak, S., Hasan, L., Khan, S.,
2015. Automatic player detection and identification for
sports entertainment applications. Pattern Analysis and
Applications. 18. 10.1007/s10044-014-0416-4.
Langer, S., Müller, R., Schmid, K., Linnhoff-Popien, C.,
2020. Difficulty Classification of Mountainbike
Downhill Trails Utilizing Deep Neural Networks.
Machine Learning and Knowledge Discovery in
Databases. 10.1007/978-3-030-43887-6_21.
Verstockt, S., Slavkovikj, V., De Potter, P. and Van de
Walle, R., 2014, Collaborative Bike Sensing for
Automatic Geographic Enrichment: Geoannotation of
road and terrain type by multimodal bike sensing, IEEE
Signal Processing Magazine, vol. 31, no. 5, pp. 101-
111, 10.1109/MSP.2014.2329379.
Baek, Y., Lee, B., Han, D., Yun, S, Lee, H., 2019, Character
Region Awareness for Text Detection, IEEE
Conference on Computer Vision and Pattern
Recognition (CVPR).
Cerna, L., Camara-Chavez, G., Menotti, D., 2013. Face
detection: Histogram of oriented gradients and bag of
feature method, International Conference on Image
Processing, Computer Vision, and Pattern Recognition
(IPCV).
Vikas, G., 2018, Face Detection – OpenCV, Dlib and Deep
Learning (C++/Python)
https://www.learnopencv.com/face-detection-opencv-
dlib-and-deep-learning-c-python
He, K., Zhang, X., Ren, S., Sun, J., 2016, Deep Residual
Learning for Image Recognition, IEEE Conference on
Computer Vision and Pattern Recognition (CVPR), pp.
770-778, 10.1109/CVPR.2016.90.
Data-driven Summarization of Broadcasted Cycling Races by Automatic Team and Rider Recognition
21
