
Development of an Immersive Simulation Platform to Study
Interactions between Automated Vehicles and Pedestrians
Lucie Lévêque
1
, Thierry Bellet
1
, Jean-Charles Bornard
2
, Jonathan Deniel
1
, Maud Ranchet
1
,
Estelle De Baere
1
and Bertrand Richard
1
1
Laboratory of Ergonomics and Cognitive Sciences Applied to Transport, Université Gustave Eiffel, Lyon, France
2
Engineering Systems International (ESI) Group, CIVITEC, Lyon, France
Keywords: Vehicle/Pedestrian Interactions, Automated Vehicle (AV), Simulation, Human-centred Design.
Abstract: The importance of informal communication between manual vehicles drivers and pedestrians in order to
prevent misinterpretation, and thus accidents, in road-crossing situations has been widely shown in the
literature. Such crucial communication consequently raises the issue of the introduction of automated vehicles
(AVs) on the roads, in which case the status of the driver becomes less obvious. In this paper, we present a
novel simulation platform, the V-HCD, allowing the conduct of immersive experimentations, both from the
pedestrian’s and the driver’s point of view. This platform will be used to study the acceptance of the automated
vehicle for the European SUaaVE project, and further to support the human-centred design of a future
empathic AV.
1 INTRODUCTION
With the rapid development of new technologies and
automation, the introduction of automated vehicles
(AVs), or connected automated vehicles (CAVs), i.e.,
cars without active drivers, offers a strong potential to
increase both traffic safety and accessibility. In fact,
in the near future, the traffic system will be shared
between fully automated vehicles, partially
automated vehicles, and manually driven vehicles
(Litman, 2020). However, it should be noted that
automated vehicles (i.e., levels 3 to 5 of driving
automation (SAE, 2018)) will not only coexist with
more conventional vehicles (i.e., levels 0 to 2 of
driving automation), but also with vulnerable road
users, including pedestrians. Generally, pedestrians
are considered an important indicator of a society’s
health and safety. With a view to contribute to a safe
traffic system, and consequently to increase the
acceptance of AVs, one key challenge is therefore to
investigate how the latter interact with pedestrians.
To achieve safe interactions, manual vehicle
drivers and pedestrians need to share their
understanding and awareness of the traffic situation
(Endsley, 1995; Bellet et al., 2009). Otherwise,
critical conflicts may occur; 21% of fatal road traffic
accidents happen to involve pedestrians (WHO,
2015). It is crucial to account that misinterpretation of
others’ intentions is one of the main causes of
accidents involving pedestrians (Habibovic et al.,
2012). This is particularly true in the case of road
crossing decision-making, and especially when
priority rules are unclear (e.g., absence of zebra
crossing). In such a context, pedestrians and manual
drivers frequently interact using non-verbal
communication to clarify their intentions. Several
studies have shown the importance of this informal
communication in the literature.
For instance, Schmidt et al. found that pedestrians
who want to cross a street tend to look at the
approaching vehicle to get acknowledgement from
the driver; if the driver returns their eye contact,
pedestrians assume that they have been seen and that
they have achieved a mutual understanding (Schmidt
et al., 2009). Similarly, Sucha et al. found that
pedestrian’s decision to cross, as well as their feeling
of safety, are directly impacted by various signals
provided by the driver, like eye contact, postures,
waving hand, or flashing lights (Sucha et al., 2017).
Such conclusions were also drawn by Rasouli et al.
who showed that the most prominent signal to
transmit pedestrians’ crossing intention is looking, or
at least glancing, towards oncoming traffic (Rasouli
et al., 2017). Finally, in their study, Schneemann et al.
found that, when pedestrians interact with vehicles at
low speed, they tend to rely on eye contact with the
driver; whereas, at faster speed, they generally base
Lévêque, L., Bellet, T., Bornard, J., Deniel, J., Ranchet, M., De Baere, E. and Richard, B.
Development of an Immersive Simulation Platform to Study Interactions between Automated Vehicles and Pedestrians.
DOI: 10.5220/0010125002490254
In Proceedings of the 4th International Conference on Computer-Human Interaction Research and Applications (CHIRA 2020), pages 249-254
ISBN: 978-989-758-480-0
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
249

their decisions on the dynamics of the vehicle
(Schneemann et al., 2017).
To summarise, all these studies clearly indicate that
an active communication between pedestrians and
manual vehicle drivers is a crucial element to manage
situational risks, to support pedestrians’ decision-
making, and to increase their safety while crossing
roads. A key concern regarding the introduction of
automated vehicles public roads is therefore due to
the changing status of the drivers. Indeed, AVs may
negatively impact interactions with pedestrians as
they will not be able to rely on cues from drivers’
behaviours anymore, potentially leading to
uncertainty and mistrust (Vissers et al., 2017).
Malmsten Lundgren et al. suggested that the
introduction of automated vehicles in the urban
context may lead to a notable change in how
pedestrians experience AVs compared to
conventional vehicles (Malmsten Lundgren et al.,
2016). In their study, pedestrians rated eye contact
with a driver as promoting safe interaction; whereas
apparent driver distraction in an AV (e.g., phoning or
reading the newspaper) tended to increase
pedestrians’ anxiety.
2 RESEARCH OBJECTIVES
Regarding automated vehicles, it should be noted that
one key challenge is not only to study the
acceptability (i.e., before use), but also the acceptance
(i.e., after use) (Schade et al., 2003; Distler et al.,
2018). However, automated and/or autonomous
vehicles are not commonly traveling on European
roads yet. Therefore, the only way to be able to study
the aforesaid acceptance is by using new generation
immersive simulation tools, which allow users to plan
for the future thanks to virtual reality (Kyriadikis et
al., 2019). By developing such immersive simulation
environments, it makes it possible to invite real
humans to practically experience future technologies
and situations. Investigating the adequacy of future
systems to end users’ needs, exploring potential risks,
and evaluating the acceptance then become
conceivable.
The in-depth study of how pedestrians and
automated vehicles interact with each other is a
crucial issue for the SUaaVE (SUpporting acceptance
of automated VEhicle) project. In this context,
developing an immersive platform gathering such
virtual reality tools would allow the people of today
to experience the AVs of tomorrow. In order to reach
this goal, Université Gustave Eiffel (ex-IFSTTAR)
and ESI/CIVITEC decided to create such an
immersive simulation platform for the SUaaVE
project, through a pre-existing tool.
3 DESIGN AND DEVELOPMENT
OF A V-HCD PLATFORM
With a view to better understand and integrate users’
needs in the design of innovative advanced driving
aid systems (ADAS), IFSTTAR and ESI Group
jointly developed a virtual human-centred design
platform; the V-HCD (Bellet et al., 2012, 2018). As a
virtual simulation toolbox, the V-HCD is able to
handle human-based simulation, that is to say based
on a virtual driver model, to virtually assess accident
risks as well as the potential benefits of future ADAS.
The V-HCD integrative platform is made of two
main components: a virtual driver, and a virtual
prototyping platform. The virtual driver is based on
the cognitive model COSMODRIVE, i.e., COgnitive
Simulation Model of the DRIVEr (Bellet et al., 2009).
The virtual prototyping platform, named ESI Pro-
SiVIC
TM
,
integrates simulated infrastructures, road
users, vehicle dynamics, and multi-technology
perception sensors (Gruyer et al., 2006).
In a recent study, Bellet et al. (Bellet et al., 2019)
used this platform for the human-centred design of a
driver monitoring system, with a view to identify
risks of collision caused by visual distraction during
driving, and in charge to manage human-machine
interactions in real time. Figure 1 represents an
example of simulation with the COSMODRIVE
model implemented in the V-HCD, to simulate the
effects of visual distraction on the driver’s situation
awareness.
In this previous project, the V-HCD was used in
the initial stages of the design process, during which
there was no prototype of the future system, and
therefore no experimentation with real humans nor
user testing was possible. In such an early stage,
making use of a user model, such as COSMODRIVE,
can enable a better comprehension of the risks due to
visual distraction depending on the situational
context. COSMODRIVE indeed allowed the
simulation of various driving scenarios with different
levels of driver distraction in order to identify the
most critical situations, as illustrated in Figure 2.
These critical scenarios were then used as ‘reference
use cases’ (Bellet et al., 2019) to consequently specify
functionality to embed in future ADAS with a view
to prevent accidents.
SUaaVE 2020 - Special Session on Reliable Estimation of Passenger Emotional State in Autonomous Vehicles
250

Figure 1: Illustration of the simulation of drivers’ visual distraction effects with the V-HCD.
Figure 2: Illustration of an example of simulated accident
risks due to visual distraction with the V-HCD platform.
Beyond this early use, the V-HCD can also be
used at more advanced stages of the design process.
Indeed, as soon as models and/or real or virtual
prototypes of the future ADAS are available, the V-
HCD can be used as an integrated simulator of: (1)
the ADAS, (2) the road environment, and (3) the
vehicle. Then, real humans can sit in the vehicle to
put themselves in the shoes of future users of this
ADAS, and consequently have a realistic experience
of this future technology before it becomes available
on real cars.
In the framework of the SUaaVE project, the
objective was to make changes to the original V-HCD
platform, in order to focus on the study of AV-
pedestrians interactions and, more precisely, on the
acceptance of such automated vehicles. As introduced
in the previous section, the latter are not traveling on
the roads yet; therefore, the only way to investigate
acceptance is through the use of virtual immersion.
It is with this in mind that the new version of the
V-HCD platform was designed and developed for the
SUaaVE project, i.e.: to allow users today to plunge
into an immersive experience of interaction with an
autonomous vehicle, either from the driver/passenger
point of view interacting with a virtual pedestrian, or
from the pedestrian point of view, willing to cross in
front of an AV.
Figure 3 describes this perspective by presenting
a short scenario where a pedestrian is crossing the
street while an automated vehicle is approaching.
More precisely, Figure 3 (view 1) shows the
designer’s overview, where the parameters (e.g., cars
colours, distances, speeds, accelerations) of each
object can be tuned.
Figure 3 (view 2) represents a possible
perspective of the aforementioned scenario, where a
human subject becomes the pedestrian. Thanks to a
virtual reality (VR) headset, they can turn their head
to check for oncoming traffic and take the pedestrian
crossing. The avatar settled in the oncoming AV can
then be positioned at different places (i.e., front or
rear seats), and participate in various activities (e.g.,
driving carefully, sleeping on the steering wheel,
talking to a rear passenger), as illustrated in Figure 4.
The objective of these diverse situations is to analyse
whether, and to what extent, the decision to cross is
modified.
Finally, Figure 3 (view 3) corresponds to a more
traditional use of simulation, where a participant
takes the place of an occupant of the AV. In such a
case, they experience the situation either through the
use of a traditional driving simulator cabin, or thanks
to a VR headset creating a virtual cockpit. The subject
can also multi-task while driving (e.g., reading a
book, playing a game). The subject can hence
experience diverse AV behavirous, and later express
their feelings about each of them. Furthermore,
different demeanours can be associated with the
pedestrian (e.g., crossing quickly, changing their
mind and stepping back).
When implemented simultaneously thanks to the
V-HCD, both perspectives (i.e., as a pedestrian and as
an AV occupant (driver or passenger), respectively)
can enable two participants to interact with each other
in a simulated world. In this instance, the first
volunteer sits in the driving simulator, while the
second one puts themselves in the position of the
Development of an Immersive Simulation Platform to Study Interactions between Automated Vehicles and Pedestrians
251
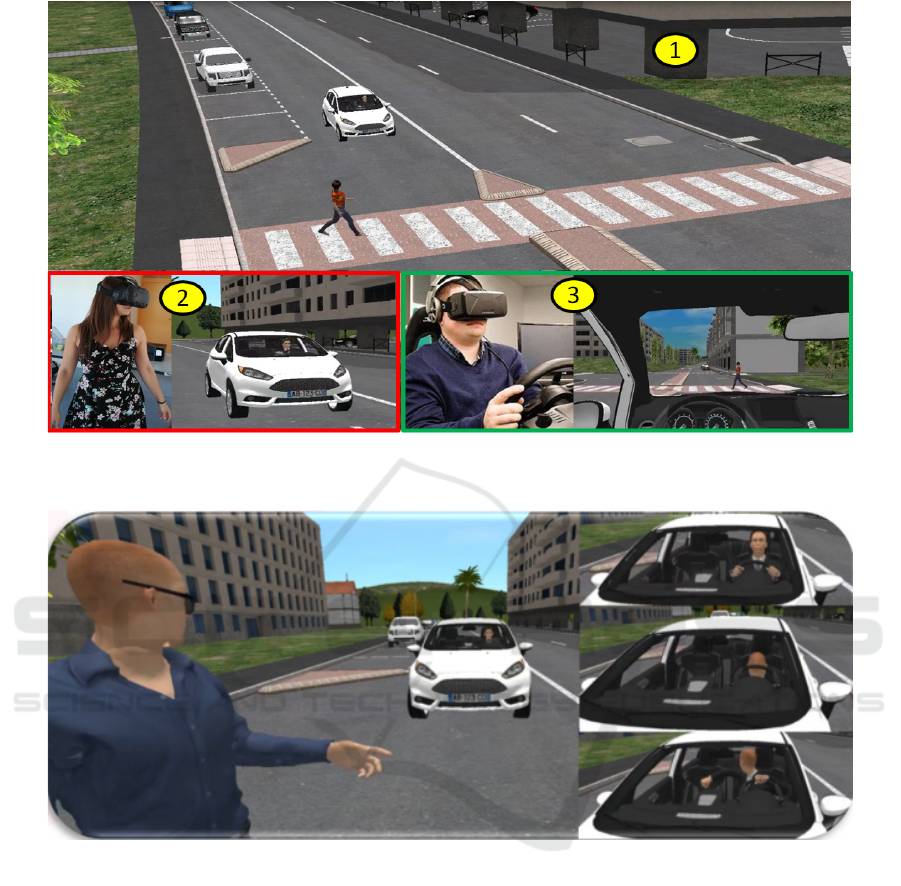
Figure 3: Illustration of an example of scenario implemented on the V-HCD platform to study the interactions between a
pedestrian and an AV with a more or less attentive driver.
Figure 4: Illustration of examples of driving scenarios implemented on the V-HCD platform to study the interactions between
a pedestrian and an AV.
pedestrian by means of the VR headset. Both
participants therefore experience the same situation at
the same time, but from a different point of view.
Each of them can witness the other’s behaviour, such
as the potential distraction of the AV occupant, or the
possible hesitation of the pedestrian before crossing.
The V-HCD platform thereby becomes a set of
tools concomitantly integrating automated vehicles
(AVs), advanced driving aid systems (ADAS), and
different ways to immerse current road users in the
future. The AVs are customisable with tailored
behaviours originating from cognitive simulation,
allowing the fine-tuning of diverse situations while
maintaining necessary realism. Simulating ADAS in
the immersive experience of road users can further
help with the integration of future systems. To
summarise, as jointly developed by Université
Gustave Eiffel (ex-IFSTTAR) and ESI/CIVITEC, the
V-HCD allows the testing of AVs and ADAS, as well
as of their acceptance by the future end-users.
4 USE OF THE V-HCD
PLATFORM FOR SUaaVE
In order to study how interactions between
pedestrians and automated vehicles may look like in
the future, and how these interactions may be affected
SUaaVE 2020 - Special Session on Reliable Estimation of Passenger Emotional State in Autonomous Vehicles
252

by the AV behaviour, Université Gustave Eiffel will
implement a two-phase experiment for the SUaaVE
project. The first phase will focus on the AV
passenger/driver’s point of view, whereas the second
phase will be dedicated to the pedestrian’s point of
view.
For the first phase of the experiment, i.e., from the
driver/passenger’s point of view, participants will
experience how the AV reacts when facing diverse
pedestrians’ road crossing behaviours (i.e., more or
less expected and/or critical). For this phase, two
different conditions will be considered: with, or
without zebra crossing. Several AV behaviours are
implemented on the V-HCD to interact with the
pedestrian; they will be fully managed and performed
by vehicle automation. During each of these
alternatives, participants will have the opportunity to
use the horn to warn the pedestrian. This way, it will
be possible to measure if, and when, they feel that the
interaction is becoming too critical, and potentially
unacceptable.
Participants will afterwards be asked to
assess the situational criticality and the reaction of the
AV according to the pedestrian’s decisions and
behaviours. After having experienced all the
scenarios, participants will be invited to a semi-
structured interview to express their suggestions on
how an “empathic” automated vehicle should react
when interacting with pedestrians, and/or should
inform the latter about its decisions and reactions. At
this level, the objective of these final questions will
be to collect useful information for the future user-
centric design of SUaaVE’s empathic automated
vehicle, namely ALFRED (Automation Level Four
and Reliable Empathic Driver).
The second phase of the experiment will be
conducted thanks to a simulated environment using
virtual reality (VR). Virtual reality indeed allows an
immersive, safe, and controlled study of the
interactions between a pedestrian and an AV
approaching at different speeds, and with distinct
braking behaviours. The second phase of the
experiment will focus on the pedestrian willingness
or unwillingness to cross the street in front of an
automated vehicle, in the absence of zebra crossing,
where priority rules are unclear. More precisely, the
emphasis will be made on the pedestrian’s perceived
safety and decision to cross, or not, the road, when
interacting with an AV. For this test, participants will
be located on a sidewalk, facing a continuous flow of
approaching vehicles. First, a randomised number of
vehicles, separated with short gaps, will travel
without stopping; then, an automated vehicle will
appear on the scene. Different behaviours will be
implemented in the AV (i.e., in terms of dynamics
and ways to stop). The AV occupant, simulated by an
avatar, may have different on-board activities (e.g.,
phoning or discussing with another passenger) or
attentive/distracted status, as illustrated in Figure 4.
Participants will be asked to use a joystick to assess
the safety versus dangerousness of crossing the road
from the pedestrian’s point of view. Depending on the
estimated safety level; the more they will estimate the
situation as safe, the further they will have to push the
joystick forward. On the contrary, the more the
crossing will be assessed as dangerous, the further
they will have to pull the joystick backwards.
Intending to cross a road being an active decision,
keeping the joystick in a neutral position during the
whole scenario will correspond to an intention not to
cross from the beginning. It will thus be possible to
collect the participants’ risk assessment in a dynamic
way throughout the approaching phase of the AV, and
this, whether or not the AV stops.
5 CONCLUSION AND
PERSPECTIVES
In this paper, we presented a new immersive
simulation platform, the V-HCD. This platform was
designed to allow users of today to “anticipate the
future” by virtually plunging into a simulated, yet
realistic, situation of interaction with automated
vehicles. This happens to be particularly useful to
study the acceptance (after a first use of a technology
thanks to virtual reality), and not only the a priori
acceptability (i.e., without any practical experience),
as well as the relevance of virtual reality to support a
cross simulation.
For the SUaaVE (SUpporting acceptance of
automated VEhicles) project, this platform will be
used in two different, notwithstanding
complementary stages. Indeed, a single participant
will be able to experience the situation both from the
pedestrian’s point of view, as well as from the
automated vehicle (AV) occupant’s point of view.
Furthermore, as a result of the efforts performed and
using the experience learnt from this project, it is also
expected to progress towards an interactive multi-
users V-HCD supported by cross-simulation: where
several users can experience a given situation and
interact in real time, some of them taking the position
of pedestrians, and other ones the roles of AV
occupants (i.e., driver or passenger). To conclude,
this new approach of virtual cross-simulation opens
the gate to different types and multiple synchronised
simulations, taking into account humans as end-users
and their different mobilities.
Development of an Immersive Simulation Platform to Study Interactions between Automated Vehicles and Pedestrians
253

ACKNOWLEDGEMENTS
This project has received funding from the European
Union’s Horizon 2020 research and innovation
programme under grant agreement No 814999.
REFERENCES
Bellet, T., Bailly-Asuni, B., Mayenobe, P., Banet, A., 2009.
A theoretical and methodological framework for
studying and modelling drivers’ mental representations.
In Safety Science, vol. 47, pp. 1205-1221.
Bellet, T., Mayenobe, P., Bornard, J-C., Gruyer, D.,
Claverie, B., 2012. A computational model of the car
driver interfaced with a simulation platform for future
Virtual Human Centred Design applications: COSMO-
SIVIC. In Engineering Applications of Artificial
Intelligence, vol. 25, pp. 1488-1504.
Bellet, T., Richard, B., Laverdure, S., Bornard, J-C., 2018.
Use of a cognitive simulation model of the driver to
support the Virtual Human Centred Design (V-HCD) of
ADAS and automated vehicles. Graz Symposium
Virtual Vehicle, Graz, Austria.
Bellet, T., Bornard, J-C., Deniel, J., Richard, B., 2019.
Driver modelling and simulation to support the Virtual
Human Centred Design of future aids. Human Systems
Integration Conference, Biarritz, France.
Distler, V., Lallemand, C., Bellet, T., 2018. Acceptability
and acceptance of autonomous mobility on demand:
The impact of an immersive experience. Conference on
Human Factors in Computing Systems, Montréal,
Canada.
Endsley, M., 1995. Toward a theory of situation awareness
in dynamic systems. In Human Factors, vol. 37, pp. 32-
64.
Gruyer, D., Royère, C., Du Lac, N., Michel, G., Blosseville
J-M., 2006. SiVIC and RTMaps, interconnected
platforms for the conception and the evaluation of
driving assistance systems. World Congress and
Exhibition on Intelligent Transportation Systems and
Services, London, United Kingdom.
Kyriakidis, M., De Winter, J., Stanton, N., Bellet, T., Van
Arem, B., Brookhuis, K., Martens,
M., Bengler, K.,
Andersson, J., Merat, N., Reed, N., Flament, M.,
Hagenzieker, M., Happee, R, 2019. A human factors
perspective on automated driving. In Theoretical Issues
in Ergonomics Science, pp. 1-27.
Habibovic, A., Davidsson, J., 2012. Causation mechanisms
in car-to-vulnerable road users crashes: Implications for
active safety systems. In Accident Analysis and
Prevention, vol. 49, pp. 493-500.
Litman, T., 2013-2020. Autonomous vehicle
implementation predictions. Victoria Transport Policy
Institute.
Malmsten Lundgren, V., Habibovic, A., Andersson, J.,
Lagrström, T., Nilsson, M., Sirrka, A., 2016. Will there
be new communication needs when introducing
automated vehicles to the urban context? In Advances
in Human Aspects of Transportation, pp. 485-497.
Rasouli, A., Kotseruba, I., Tsotsos, J., 2017. Agreeing to
cross: How drivers and pedestrians communicate. In
IEEE Intelligent Symposium (IV), Washington, USA.
Schade, J., Schlag, B., 2003. Acceptability of urban
transport pricing strategies. In Transportation Research
Part F: Traffic Psychology and Behaviour, vol. 5, pp.
45-61.
Schmidt, S., Färber, B., 2009. Pedestrians at the kerb:
Recognising the action intentions of humans. In
Transportation Research Part F: Traffic Psychology
and Behaviour, vol. 12, pp. 300-310.
Schneemann, F., Gohl, I., 2017. Analyzing driver-
pedestrian interaction at crosswalks: A contribution to
autonomous driving in urban environments. In IEEE
Intelligent Vehicles Symposium (IV), Washington,
USA.
Society of Automotive Engineers (SAE), 2018. Taxonomy
and definitions for terms related to driving automation
systems for on-road motor vehicles. J3016-201806.
Sucha, M., Dostal, D., Risser, R., 2017. Pedestrian-driver
communication and decision strategies at marked
crossings. In Accident Analysis and Prevention, vol.
102, pp. 41-50.
Vissers, L., Van der Kint, S., Van Schagen, I., Hagenzieker,
M., 2017. Safe interaction between cyclists,
pedestrians, and automated vehicles: What do we know
and what do we need to know? Institute for Road Safety
Research, Report R-2016-16.
World Health Organisation (WHO), 2015. Global status
report on road safety.
SUaaVE 2020 - Special Session on Reliable Estimation of Passenger Emotional State in Autonomous Vehicles
254
