
Semantic Web Services for AI-Research with Physical Factory
Simulation Models in Industry 4.0
Lukas Malburg
1 a
, Patrick Klein
1 b
and Ralph Bergmann
1,2 c
1
Business Information Systems II, University of Trier, 54296 Trier, Germany
2
German Research Center for Artificial Intelligence (DFKI), Branch University of Trier,
Behringstraße 21, 54296 Trier, Germany
Keywords:
Semantic Web Services, Industry 4.0, Artificial Intelligence, Flexible Cyber-Physical Workflows, OWL-S,
WSMO.
Abstract:
The transition to Industry 4.0 requires smart manufacturing systems that are easily configurable and provide
a high level of flexibility during manufacturing in order to achieve mass customization or to support cloud
manufacturing. To realize this, Cyber-Physical Systems (CPSs) combined with Artificial Intelligence (AI)
methods find their way into manufacturing shop floors. For using AI methods in the context of Industry 4.0,
semantic web services are indispensable to provide a reasonable abstraction of the underlying manufacturing
capabilities. In this paper, we present semantic web services for AI-based research with physical factory sim-
ulation models in Industry 4.0. Therefore, we developed 70 semantic web services based on Web Ontology
Language for Web Services (OWL-S) and Web Service Modeling Ontology (WSMO) and linked them to an
already existing domain ontology for intelligent manufacturing control. Suitable for the requirements of CPS
environments, our pre- and postconditions are verified in near real-time by invoking other semantic web ser-
vices in contrast to complex reasoning within the knowledge base. Finally, we examine the feasibility of our
approach by executing a cyber-physical workflow composed of semantic web services using a state-of-the-art
workflow management system.
1 INTRODUCTION
Nowadays, the industry is in a transformation to-
wards the fourth industrial revolution, also known
as Industry 4.0 in the German-speaking area (Lasi
et al., 2014). The predominant application of Ar-
tificial Intelligence (AI) methods in Cyber-Physical
Systems (CPSs) (Broy et al., 2012) is a typical char-
acteristic of this transformation (Lee et al., 2014).
In this context, flexibility is one of the central as-
pects for manufacturing companies particularly be-
cause of ever shorter market launch times and increas-
ing customer demands for individualization (Cheng
et al., 2017; Lasi et al., 2014). In order to con-
duct close to reality Industry 4.0 research, we use
a physical Fischertechnik (FT)
1
factory simulation
model because companies are often not willing to pro-
vide data from and access to their production lines
a
https://orcid.org/0000-0002-6866-0799
b
https://orcid.org/0000-0002-5077-2645
c
https://orcid.org/0000-0002-5515-7158
1
https://www.fischertechnik.de/en/simulating/industry-4-0
for research purposes. To use AI applications in
practise, knowledge must necessarily be available in
formal and machine-readable representations (Humm
et al., 2020). Semantic Web Services (SWSs) ad-
dress the problems of automatic discovering, com-
posing, and executing by providing a declarative, on-
tological framework for describing them. Using AI
methods (e. g., automated planning such as Marrella,
2018; Marrella and Mecella, 2018, multi-agent sys-
tems for decentralized manufacturing control such as
Ciortea et al., 2018; Ocker et al., 2019, Case-Based
Reasoning (CBR) such as Minor et al., 2014; Müller,
2018) to enhance flexibility in cyber-physical produc-
tion workflows (Bordel Sánchez et al., 2018; Seiger
et al., 2018) inevitably require such semantic annota-
tions. Several related work (e. g., Lastra and Delamer,
2006; Puttonen et al., 2010, 2013) exist that already
address these issues by using SWSs. However, the
currently available approaches that use SWSs in the
context of Industry 4.0 focusing only on specific as-
pects and do not consider the entire context of man-
ufacturing environments. Furthermore, the complex
32
Malburg, L., Klein, P. and Bergmann, R.
Semantic Web Services for AI-Research with Physical Factory Simulation Models in Industry 4.0.
DOI: 10.5220/0010135900320043
In Proceedings of the International Conference on Innovative Intelligent Industrial Production and Logistics (IN4PL 2020), pages 32-43
ISBN: 978-989-758-476-3
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

reasoning within the knowledge base makes real-time
execution and monitoring of manufacturing processes
difficult. In particular, we experienced these problems
already in our physical simulation factory and thus it
is probably not possible to use these approaches in
real production settings efficiently. For this reason,
we present an approach for applying SWSs to avoid
complex reasoning in the knowledge base and that
is therefore suitable for near real-time AI-based ap-
plications. We present three exemplary AI use cases
namely multi-agent systems, automated planning, and
business process management in CPSs that demand
for semantically enriched Service-Oriented Architec-
tures (SOAs). Afterwards, we identify requirements
from the use cases that should be fulfilled by the pro-
posed architecture and show why SOAs are indispens-
able. In the following, Section 2 describes the layout
of our used physical Fischertechnik (FT) simulation
factory and presents use cases in which the applica-
tion of semantic information provided by semantic
web services could be important. Furthermore, re-
lated work concerning the use of web services in man-
ufacturing and a domain ontology for physical simu-
lation factories are presented. The developed seman-
tic web services themselves are described in detail in
Section 3 and a feasibility test is presented in Section
4. Finally, a conclusion is given and future work is
discussed in Section 5.
2 FOUNDATIONS AND RELATED
WORK
2.1 Semantic Web Services for Flexible
Production
The paradigm of Service-Oriented Architectures
(SOAs) can be used to achieve manufacturing flexibil-
ity as it is needed for Industry 4.0 mass customization
(Lasi et al., 2014) and reconfigurability by decoupling
functionality from the underlying implementation and
location (Lu and Ju, 2017). For implementing SOAs,
web service technologies can be used (Jammes and
Smit, 2005) and, in particular, in the context of AI,
these are semantically enriched, resulting in Semantic
Web Services (SWSs). Therefore, semantic technolo-
gies such as Web Ontology Language for Web Ser-
vices (OWL-S) (Martin et al., 2007) for expressing the
meaning of the web service interface can be used. In
general, this enables automatic discovering, compos-
ing, and executing that are required for using AI meth-
ods.
Several works propose the use of SWSs for smart
manufacturing in Industry 4.0 but focusing only on
partial aspects and do not consider the entire context
of the shop floor. For instance, Puttonen et al. (2013)
present an approach to use SWSs for executing manu-
facturing processes by means of three software agents
represented as web services. One of these agents, re-
ferred to as Service Monitor, is a specialized web ser-
vice that carries out semantic web service composi-
tion by using planning techniques w. r. t. a given pro-
duction goal and the current state of the world that
is provided by a domain ontology. Therefore, they
use OWL for describing the state of the production
system as well as OWL-S and SPARQL expressions
for semantically describing the available web services
that offer production capabilities. In our work, we use
a digital representation connected to a corresponding
physical simulation model instead of exclusively us-
ing artificially simulated data. Additionally, we focus
on semantic descriptions of the underlying web ser-
vices that are remotely accessible via REST in order
to control manufacturing resources directly in con-
trast to use agents. Furthermore, we combine our
SWSs with a comprehensive domain ontology of our
production environment, whereas their modeled do-
main knowledge is limited to product definitions. Our
work also focuses on a cyber-physical environment in
which real-time sensor values are retrieved as part of
service pre- and postconditions. Moreover, they just
have two OWL-S processes, which result in 126 pro-
cess variants after considering all possible permuta-
tions of descriptions.
Since modern Cyber-Physical Production Systems
(CPPSs) (Monostori, 2014) consist of many different
components and therefore many stakeholders are in-
volved in their development process up to the later use
in the manufacturing of products, Lobov et al. (2008)
investigated the application of SWSs for orchestration
of a flexible control. They propose OWL for model-
ing a Process Taxonomy, Product Ontology, Equip-
ment Ontology, and Service Ontology and mainly
discuss the responsibilities of involved persons for
knowledge acquisition and maintenance rather than
present their detailed semantic specification.
Most similar to our work, Cheng et al. (2017) pre-
sented an architecture and knowledge model for the
integration of web services for flexible manufactur-
ing systems. Their model includes ontologies that are
similar to Lobov et al. (2008). However, the web ser-
vices themselves are not semantically modeled, while
Puttonen et al. (2013) develop semantic web services
but do not link them to a comprehensive domain on-
tology of the manufacturing environment. Based on
our experiments, we assume that the continuous rea-
soning to evaluate the pre- and postconditions is too
Semantic Web Services for AI-Research with Physical Factory Simulation Models in Industry 4.0
33

complex and time consuming for real world applica-
tions due to ongoing updates of the state of a CPPS
and the huge number of axioms considered during the
inference process.
Most recently, Järvenpää et al. (2019) present
the Manufacturing Resource Capability Ontology
(MaRCO) that aims to provide a semantic description
of the capabilities of manufacturing resources. Ca-
pability parameters as configuration settings of man-
ufacturing resources are also modeled and the capa-
bilities are divided into simple capacities and aggre-
gated combined capacities composed of several sim-
ple capacities. However, their approach is not re-
lated to a SOA and does not directly offer SWSs for
the corresponding capacities to invoke them remotely.
Thus, there is no direct connection between the mod-
eled knowledge and the physical resources to control
manufacturing. Furthermore and in contrast to our
work, no preconditions and effects have been mod-
eled for the capacities, which makes it difficult to use
AI methods directly for intelligent control. Similarly,
Schnicke et al. (2020) present a SOA in which ser-
vices are described by their capabilities, the associ-
ated costs, and the achievable quality of the service
invocation (e. g., time, costs etc.). For discovering a
proper service, a match making by using tags that are
linked to the services is applied. The approach does
not use already established techniques to enrich web
services with semantic descriptions. Thus, it is also
difficult to use AI techniques directly.
All in all, there is a lack of research regarding
the integration of semantically enriched web services
with an existing domain ontology of a manufacturing
environment to make production control more flexi-
ble as well as of research that considers the reasoning
complexity in real-time applications sufficiently.
2.2 Industry 4.0 Simulation Factory
Model
Similar to Cheng et al. (2017), we use a physical Fis-
chertechnik (FT) factory model for the simulation of
an Industry 4.0 manufacturing environment
2
. Such
models are referred to as Learning Factories (Abele
et al., 2017) and are used for education and Industry
4.0 research purposes (e. g., Calà et al., 2016; Klein
and Bergmann, 2019). By using such physical simu-
lation models, it is possible to conduct research under
laboratory conditions and to assess the suitability of
AI methods and prototypical implementations before
they are potentially used in practice. Furthermore, the
direct impact on the physical world can be investi-
2
See www.iot.uni-trier.de for more details.
gated and the step towards transferability to real fac-
tories is closer. When using a digital twin (Boschert
and Rosen, 2016) or simulated data exclusively, this
is only possible to a limited extent and with greater
obstacles. Our factory consists of two identical shop
floors that are linked for the exchange of workpieces
as shown in Figure 1. Each shop floor consists of 4
workstations with 6 identical machines: a sorting ma-
chine with color detection, a multi-processing work-
station with an oven, a milling machine, and a work-
station transport that connects both of them, a high-
bay warehouse, and a vacuum gripper robot. Addi-
tionally, each shop floor has individual machines, i. e.,
a punching machine and a human workstation in the
first and a drilling machine in the second shop floor.
Each shop floor is equipped with several light barri-
ers, switches, and capacitive sensors for control pur-
poses. Additionally, the first shop floor is enhanced
with dedicated sensors such as acceleration, differen-
tial pressure, and absolute orientation sensors. RFID
reader/writers are integrated in workstations on both
shop floors and in the high-bay warehouse resulting
in 28 communication points. This allows each work-
piece to be tracked and the required manufacturing
operations and parameters to be retrieved and adjusted
during production as necessary. Furthermore, a cam-
era is placed above the two shop floors to detect and
track the workpieces.
The availability of a knowledge representation in
form of an ontology that represents the manufactur-
ing environment enables engineers to share, reuse,
and make knowledge in formal and machine-readable
way explicit. For Fischertechnik simulation facto-
ries, FTOnto (Klein et al., 2019) provides a seman-
tic description of resources such as sensors and ac-
tuators, products and raw materials, as well as op-
erations such as manufacturing capabilities and han-
dling. Each physical part of the factory is represented
as an individual and is ordered in a sub-class hier-
archy based on an established ontology for model-
ing a manufacturing system called MASON (Lemaig-
nan et al., 2006). Additionally, object properties are
used to model relations between individuals. More-
over, relationships between sensors and actuators are
modeled by the SOSA ontology (Janowicz et al.,
2019). Figure 2 depicts a part of the domain on-
tology FTOnto. Classes are surrounded by an or-
ange circle and instances by a purple rectangle. The
dashed arrow between both states a subclass rela-
tionship or that the instance is from the type of this
class. For example, MPS_MillingMachine is the in-
stance of the class MillingMachine. The statement
that MPS_MillingMachine is driven by MPS_Motor2
is modeled by the property actuates.
IN4PL 2020 - International Conference on Innovative Intelligent Industrial Production and Logistics
34

High-Bay Warehouse 1
Sorting Machine 1
Sorting Machine 2
Punching
Machine
Drilling
Machine
Shop Floor 1
Shop Floor 2
Milling
Machine 2
Vacuum Gripper Robot 2
Oven 2
Vacuum Gripper Robot 1
Milling Machine 1
Oven 1
Sorting Machine 2
Drilling
Machine
Human Workstation
Punching
Machine
High-Bay Warehouse 1
High-Bay Warehouse 2
Sorting Machine 1
Figure 1: The Two Fischertechnik Factory Simulation Models.
Figure 2: Subset of Domain Ontology FTOnto.
2.3 Use Cases
We now introduce three typical use cases by which
we want to demonstrate the potential of semantic
web services for AI-based research in the context of
CPPSs.
Multi-Agent Systems for Decentralized Control
Multi-Agent Systems (MASs) can be used to encapsu-
late functions, e. g., order processing, product design,
production planning, or to represent physical manu-
facturing resources with their manufacturing opera-
tions. For instance, a planning agent either uses man-
ually predefined plans that specify manufacturing op-
erations and their sequence or generates a plan under
consideration of the semantic descriptions of seman-
tic web services that represent the manufacturing ca-
pabilities in order to achieve a given production goal
such as a specific customer request (Ciortea et al.,
2018). We consider a use case in which Multi-Agent
Systems (MASs) utilize the SOA as an abstraction of
physical devices to obtain information from the shop
floor and to control the physical devices by invocation
of web services.
Workflow Planning of Manufacturing Processes
Similar to agent-based planning approaches, auto-
mated planning techniques can be used to build pro-
duction workflows, i. e., a sequence of actions, from
scratch or parts of them by using a complete domain
model, an initial state, and a goal state (Marrella,
2018; Marrella and Mecella, 2018). Semantic web
services enriched with preconditions and effects can
be used for workflow planning. The work of Chen
and Yang (2005) is one of the first in this area that
Semantic Web Services for AI-Research with Physical Factory Simulation Models in Industry 4.0
35

introduces the basic principle. Puttonen et al. (2013)
also use semantic web services and transfer the se-
mantic descriptions into the Planning Domain Def-
inition Language (PDDL) (McDermott et al., 1998)
for planning of manufacturing processes. Similar to
the latter approach, we propose a use case in which
automated planning techniques can be used to gener-
ate cyber-physical workflows enabled by the defini-
tion of semantic web services and the transformation
into PDDL.
Business Process Management for Cyber-Physical
Systems
The application of Business Process Management
(BPM) techniques in cyber-physical environments
can lead to numerous advantages. These are mainly
due to the automatic retrieval of sensor data or events
and are useful in determining the status of activities,
making decisions about future process flow, and de-
tecting deviations at an early stage (Janiesch et al.,
2020). The SOA provides the services that can be
used to execute process activities or to acquire sen-
sor data values. For our use case, we consider that
an intelligent system for BPM needs to access this
data in different process steps or within a specified
time frame in order to use it properly. For example,
Process-Oriented Case-Based Reasoning (POCBR)
(Minor et al., 2014; Müller, 2018) has shown great
potential as an experience-based activity in similar
research fields (e. g., in the cooking domain to repre-
sent cooking recipes as workflows in Müller (2018) or
in the domain of scientific workflows in Zeyen et al.
(2019)) by using best-practise workflows from a case
base. This approach can perhaps also be used to in-
crease workflow flexibility in CPPSs.
3 SEMANTIC WEB SERVICES
FOR AI-BASED RESEARCH
In this chapter, our Service-Oriented Architecture
(SOA) with semantically enriched web services for
applying them in the use cases previously described
is presented. Note that the SOA provides the ser-
vices to retrieve data for implementing a digital twin
(Boschert and Rosen, 2016). The development pro-
cess of our SOA follows the well-known ontology
development methodology by Sure et al. (2009) that
contains the four steps Kickoff, Refinement, Evalua-
tion, and Application & Evolution (see Figure 3) and
that can also be applied for developing semantic web
services. The steps are described in detail in the fol-
lowing.
Kickoff Refinement Evaluation
Application&
Evolution
Figure 3: The Ontology Development Process by Sure et al.
(2009).
3.1 Requirements
In this section, we introduce as part of the Kickoff
phase requirements (RQs) that a SOA should meet in
order to be suitable for AI-based research activities in
Industry 4.0. The requirements have been primarily
derived from the use cases presented in Section 2.3.
We do not divide the requirements according to these
use cases, because most requirements are essential for
more than one use case.
RQ 1 – Provide Interoperability and Interconnec-
tivity. The SOA should be developed to achieve
interoperability and interconnectivity from sev-
eral controller types and programming languages
(Burns et al., 2019; Puttonen et al., 2013).
RQ 2 – Connect to Existing Knowledge Represen-
tations. The services should be linked to an exist-
ing knowledge representation in form of a domain
ontology. Domain ontologies are important for
modeling production systems and for the trans-
formation towards Industry 4.0 (Puttonen et al.,
2013). Due to the connection of semantic web
services with an existing ontology, it is possible to
directly check the result of a web service that re-
turns sensor values for plausibility. Furthermore,
it is possible to identify services that are currently
not available due to an error of a physical manu-
facturing resource.
RQ 3 – Enable Ontology and Knowledge Base Up-
dates and Real-Time Verification. In the con-
text of Industry 4.0, it is necessary to use real-time
data to make proper decisions (Burns et al., 2019;
Lasi et al., 2014). Thus, it is necessary to keep the
instances in the knowledge base up to date (Lobov
et al., 2008).
RQ 4 – Abstract from Low-level Control Com-
mands. It is important to abstract the web
services from individual low-level control com-
mands to create a hardware abstraction layer for
CPSs. In order to use the web services in a busi-
ness process management context, each service
should additionally perform an atomic operation
(Puttonen et al., 2019). It is a necessary require-
ment to be able to break down end-to-end pro-
cesses (see Challenge 7 in Janiesch et al., 2020).
RQ 5 – Enrich Web Services with Semantic De-
scriptions. Due to the semantic enrichment of
web services in a SOA, it enables the use of AI-
IN4PL 2020 - International Conference on Innovative Intelligent Industrial Production and Logistics
36
uses
Design
Layer
Request
Enactment
Layer
Adaptation
Layer
ResponseCommand
WebServer
Web
Service
Cyber-PhysicalLayer
actuatesmeasuresactuates
configures configures
Response
Domain
Ontology
describes
presents
supports
Service
Service
Profile
Service
Model
describes
Service
Grounding
OWL-S
contains
describedby
uses
uses
CPS
interacts
ServiceLayer
Figure 4: Service Conceptualization for Flexible Production Control (Based on Marrella and Mecella 2018).
based technologies such as those presented in the
use cases for improving resource utilization and
for controlling the execution of the whole manu-
facturing processes, i. e., preconditions and effects
can be used to determine the impact of certain
activities (see Challenges 15 and 16 in Janiesch
et al., 2020 and also Hepp et al., 2005).
RQ 6 – Model Relationships between Web Ser-
vices. Relationships and interconnections be-
tween atomic as well as composed web services
should be modeled to determine dependencies be-
tween services of individual manufacturing re-
sources and to identify semantically similar ser-
vices (see Challenge 6 in Janiesch et al., 2020).
RQ 7 – Parameterization of Web Services. Re-
configurability of production systems is needed to
satisfy changing process goals. By parameteriz-
ing web services that represent the possible capa-
bility configuration settings of physical manufac-
turing devices, different production goals can be
achieved (Lobov et al., 2008).
RQ 8 – Resolve Mutual Exclusion. To prevent
multiple access to a single physical manufactur-
ing resource, the SOA should ensure that only
one service may have simultaneous access to this
resource to execute the corresponding operation
(Lobov et al., 2008). During this time, however,
further service requests should not be lost, but
saved.
RQ 9 – Orchestrate and Composite Web Services.
It should be possible to orchestrate or composite
the developed services to more complex processes
(Lobov et al., 2008) and in order to fulfill an over-
all process goal (Puttonen et al., 2013, 2019).
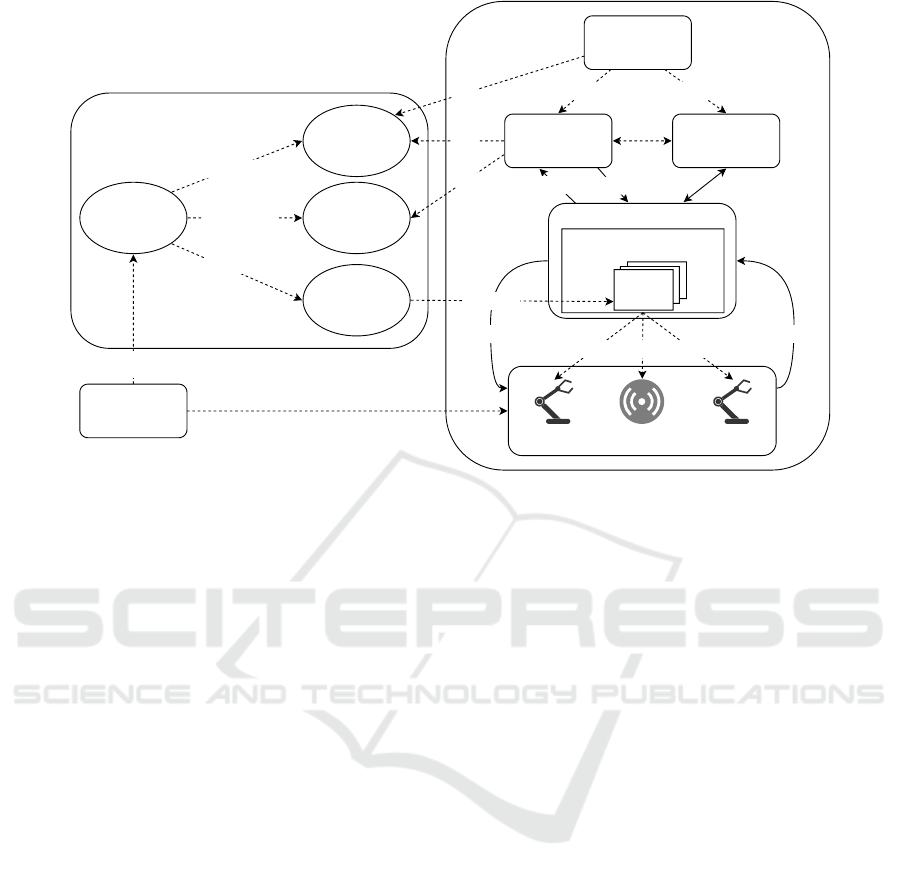
3.2 Architecture Overview
Our concept integrates a SOA composed of corre-
sponding semantic web services with a domain on-
tology in an architecture of a CPS, which is, in fact,
the foundation for research on AI-based control for
flexible manufacturing processes. More precisely, we
adopt the layered architecture for managing cyber-
physical workflows proposed by Marrella and Me-
cella (2018) depicted on the right side as a basis to
define a SOA as a service layer. Additionally, we
linked the SWSs of the service layer to an existing do-
main ontology of a manufacturing environment and
to OWL-S. An overview of the proposed architec-
ture is shown in Figure 4. Starting from the bot-
tom, the Cyber-Physical Layer represents the man-
ufacturing environment where several cyber-physical
production workflows are executed. We propose to
represent each resource (e. g., actuator, sensor etc.) as
well as their relationships in a domain ontology. On
top of this layer, the Service Layer is responsible for
transmitting and executing control commands to the
Cyber-Physical Layer and receiving responses (e. g.,
raw data from sensors). Therefore, this layer contains
semantic web services on different abstraction levels
for control commands as well as for sensor data re-
Semantic Web Services for AI-Research with Physical Factory Simulation Models in Industry 4.0
37

trieval. To describe the services semantically, each
service contains a semantic description such as pro-
posed by OWL-S or the Web Service Modeling On-
tology (WSMO) (Roman et al., 2005) respectively. In
our concept, we re-model parts from both of them for
semantic enrichment of the web services. The result-
ing service ontology is merged with the domain ontol-
ogy FTOnto to relate physical resources to their cor-
responding services. Finally, these web services are
accessible via REST using a web server that can be
seen as an example of a Service Layer implementa-
tion. Thereby, each service has a Service Grounding
that describes the access to the actual service of the
Service Layer. In this regard, the Service Layer con-
stitutes the connection between the Enactment Layer
and Adaptation Layer with the Cyber-Physical Layer,
whereby the web server communicates with both up-
per layers and subsequently executes the desired web
services. The Enactment Layer is responsible for the
execution of modeled cyber-physical workflows by
using the corresponding underlying SWSs. If mod-
eled cyber-physical workflows can not be executed as
planned, adaptations may be necessary. For this rea-
son, the Adaptation Layer uses AI methods such as
presented in the use cases for intelligent production
control. Therefore, Enactment Layer and Adaptation
Layer need access to the Service Profile for discov-
ering services and to the Service Model for how the
service works. In addition, the Design Layer allows
users to exploit the knowledge modeled in the Service
Profile to find appropriate web services during work-
flow modeling.
ServiceLayer
Web
Service
Command
Response
actuates
measures
Controller
Request
Response
WebServer
Cyber-PhysicalLayer
Figure 5: Illustration of the Execution Sequence of a Web
Service Invocation.
Figure 5 shows how the invocation of a web ser-
vice results in a concrete action in the Cyber-Physical
Layer, where the functionality of the web service
is executed. The controller that manages the cor-
responding physical manufacturing resource receives
the request to execute a certain command, if neces-
sary with special capability parameter settings. The
controller actuates the managed device, measures the
corresponding value of a sensor or performs a basic
configuration of the device. Afterwards, the raw data
or generally the response is transferred back to the
web server, i. e., the sensor value or the message that
the command has been executed both with a start and
end time stamp.
3.3 Semantic Web Services for a
Physical Factory Model
Based on the presented architecture, a top-down ap-
proach has been applied to identify and develop 70
SWSs that allow to use independently all functions of
the physical devices of the complete shop floors pre-
sented in Section 2.2. The approach has been used for
the identification of services and selection according
to the level of abstraction corresponding to the use
cases (see RQ 4). All in all, 70 SWSs have been
derived in the refinement phase and due to the vari-
ety of possible parameter values, there exist 364 dif-
ferent configurations of the web services (see RQ 7).
During this phase, pre- and postconditions have been
modeled as web services, results with included ef-
fects have been added, and all web services have been
linked to the existing ontology (see RQ 2). For using
AI planning techniques, the modeled preconditions
and effects can be converted into a planning model.
The provided services are divided into services that
perform an activity in the physical factory and into
services that are offered for measuring sensor data or
for configuring device settings. Furthermore, the ser-
vices are hierarchically ordered into several more spe-
cific classes (see RQ 6). This is illustrated in Figure
6 with a class diagram of the physical resources from
our FT simulation factory (cf. Figure 1). The meth-
ods specified in the classes are encapsulated as web
services and we classified the web services into sens-
ing and configuration services as well as activity ser-
vices according to their purpose and separated by a
dashed line. Please consider that the General Con-
troller interface only provides generic sensing and
configuration services that are reused by the actual
controllers. For example, the method pickUpAnd-
Transport of the VGR has two capability parameters
(start and end) for specifying the start and end po-
sition of a workpiece transport. The method is sim-
ilarly implemented as a web service with the same
two parameters. Due to the variety of positions where
a workpiece can be picked up and dropped off, this
single web service results in 72 different configura-
tion possibilities; the superscript number above the
individual methods illustrates this. Each of these pos-
sibilities of different positions has specific precondi-
tions and effects depending on the given parameter
values for start and end. By encapsulating services of
different controllers of the cyber-physical layer, our
SOA contributes to achieving interconnectivity and
interoperability by providing RESTful web services
(see RQ 1). To describe the services semantically,
we have re-modeled the important concepts of OWL-
S and WSMO for our work and have especially tai-
IN4PL 2020 - International Conference on Innovative Intelligent Industrial Production and Logistics
38

5
20
3
1
1
2
4
10
10
81
1
4
6
6
4
9
72
1
2
3
1
2
2
2
2
3
9
3
1
1
4
3
2
1
2
3
8
21
21
8
5
20
3
1
1
2
4
10
10
81
1
4
6
6
4
9
72
1
2
3
1
2
2
2
2
3
9
3
1
1
4
3
2
1
2
3
8
21
21
8
10
10
Figure 6: Class Diagram of the Physical Manufacturing Resources.
lored them to our simulation context. This means
that we only have one service class, corresponding
to the Service Profile in OWL-S, that describes the
functionality of the service w. r. t. its parameters, in-
puts, outputs, preconditions, and results. Addition-
ally, the description of postconditions is added and re-
modeled from WSMO. These semantic descriptions
can be used to determine what functionality the ser-
vice provides, what requirements have to be fulfilled
for execution, and how its successful execution can
be verified (see RQ 5). Whereas most previous work
updates the knowledge base continuously and verifies
the condition expressions based on the current real
world state, we link to other semantic web services
and use their response for our condition verification.
This means that conditions are evaluated in near real-
time based on sensor data that is accessed via a web
service invocation (see RQ 3). This functionality is
similar to what one would expect from a digital twin.
The web service used to check the conditions can in
turn require further web service invocations for condi-
tion verification (see RQ 6 and RQ 9). To handle mul-
tiple parallel requests to one physical resource, a pri-
ority queue according to the First-In-First-Out prin-
ciple is implemented and services are only executed
by the web server when all required resources are not
blocked by a previous request (see RQ 8). The goal
of the queue is to store incoming web service requests
to ensure that no conflicts between multiple requests
occur during execution of different resources. After
the service is carried out, we control the execution
with postconditions that have to be satisfied to deter-
mine whether a particular activity has been success-
fully performed. If all postconditions are fulfilled, the
successful response is given to the client, otherwise,
the client receives a message which postconditions are
not satisfied.
In the following, we present one of the modeled
semantic services in more detail. For this purpose, the
already mentioned pickUpAndTransport service of
Semantic Web Services for AI-Research with Physical Factory Simulation Models in Industry 4.0
39

1 PREFIX rdf: <http://www.w3.org/1999/02/22−rdf−syntax−ns#>
2 PREFIX owl: <http://www.w3.org/2002/07/owl#>
3 PREFIX rdfs: <http://www.w3.org/2000/01/rdf−schema#>
4 PREFIX xsd: <http://www.w3.org/2001/XMLSchema#>
5 PREFIX ftonto: <http://iot.uni−trier.de/FTOnto#>
7 SELECT ?service ?precondition ?preconditonCheckService ?
checkURL ?requiredKeyInServiceResponse ?
requiredValueInServiceResponse
8 {
9 ?service ftonto:hasURL "http://127.0.0.1:5000/vgr/
pick_up_and_transport?machine=vgr_1&start=sink_1
&end=oven"^^xsd:string .
10 ?service ftonto:hasPrecondition ?precondition .
11 ?precondition ftonto:isCheckedBy ?preconditonCheckService
.
12 ?preconditonCheckService ftonto:hasURL ?checkURL.
13 ?precondition ftonto:requiredKeyInServiceResponse ?
requiredKeyInServiceResponse .
14 ?precondition ftonto:requiredValueInServiceResponse ?
requiredValueInServiceResponse .
15 }
Listing 1: SPARQL Expression for Retrieving
Preconditions.
the VGR is selected since it contains most of the an-
notated semantic elements such as pre- and postcon-
ditions as well as results. Figure 7 illustrates the se-
mantic annotations and their relationships as a graph.
In this context, green rectangles with rounded corners
represent data properties, violet rectangles represent
instances of classes that are in turn represented by or-
ange ellipses. If invoked, this service fulfills the func-
tion of picking up a workpiece at sink one of the sort-
ing machine (start), transporting it to the oven, and
eventually dropping it off at the oven (end). Before
the execution starts, the request is scheduled in the
queue and as soon as no other request comes first, the
execution of the service starts. At this point, access to
the physical resource for other clients is blocked and
intermediate requests are stored in the queue. The first
part of the execution is the check of the preconditions.
In this case, the SPARQL query as shown in Listing
1 is executed and returns five preconditions that must
be fulfilled (see Figure 7). For instance, the oven must
be available and ready and the light barrier that moni-
tors the end position of the transport must not be inter-
rupted, because that indicates an empty storage space.
In particular, these preconditions refer to other seman-
tic web services and their responses can be evaluated
outside of the knowledge base but using the verifica-
tion rules modeled in the knowledge base. This proce-
dure enables to perform the verification in near real-
time without importing large amounts of raw sensor
data produced with high frequency required for com-
plex reasoning within the knowledge base for precon-
dition verification. This could otherwise lead to con-
siderable overhead for reasoning and possibly wrong,
not real-time information for decision making. For
providing real-time data, web services to retrieve the
status of a sensor (e. g., a light barrier) are handled
by a separate queue as the web services that initi-
ate manufacturing operations. This division enables
an immediate result even if the corresponding ma-
chine is still performing a manufacturing operation.
The described principle is also applied to postcondi-
tions that are semantic web services, too. The exem-
plary service contains one postcondition that checks
whether the service has been executed successfully.
The postcondition checks whether the light barrier,
which was not interrupted for the corresponding pre-
condition, has now been interrupted, i. e., it is verified
that the workpiece has been transported from the first
sink of the sorting machine to the oven and thus the
execution was successful. For each service, regard-
less of whether it is used as a pre- or postcondition
or neither, the respective URL to invoke the service is
represented as instance (see Figure 7).
4 FEASIBILITY TEST
In this section, we demonstrate the usage of our devel-
oped SOA as part of the Evaluation phase of the on-
tology development methodology for usefulness for
the described use cases in Section 2.3. Therefore, we
have prototypically implemented the third use case by
using the workflow management system Camunda
3
.
Camunda is able to invoke web services by using
Business Process Model and Notation (BPMN) con-
form Service Tasks. We implement a small cyber-
physical production workflow that transports a work-
piece from the first sink of the sorting machine to the
oven, burns it, and after a quality inspection by an
employee, it is transported and stored in the high-bay
warehouse. Figure 8 illustrates the described man-
ufacturing process as a BPMN diagram. The corre-
sponding web server receives the web service invoca-
tions from Camunda and forwards the execution com-
mand to the controller of the specified physical de-
vice. Before execution, an implemented Python class
checks if the preconditions and after execution, the
corresponding postconditions, of the service are satis-
fied by using OWLReady
4
(Lamy, 2017). Moreover,
we also evaluated a failure scenario where the work-
piece is lost during the transport to the oven. In this
3
https://camunda.com/
4
https://pypi.org/project/Owlready2/
IN4PL 2020 - International Conference on Innovative Intelligent Industrial Production and Logistics
40

hasPostcondition
Service
isServiceOf
hasPrecondition
hasURL
Service_VGR_Pick_
Up_And_Transport
Cond_SM_1_Status_Of_
Light_Barrier_6_
Interrupted_True
Cond_VGR_1_State_Of_
Machine_Ready
contains
hasService
isLocatedIn
currentState
VGR
isCheckedBy
Cond_OV_1_
Status_Of_Light_Barrier_
5_Interrupted_False
Cond_OV_1_State_Of_
Machine_Ready
Cond_OV_1_
Status_Of_Light_Barrier_
5_Interrupted_True
Condition
hasPrecondition
hasPrecondition
hasPrecondition
hasPrecondition
FT_Factory_Shop_Floor_1
ShopFloor
http://127.0.0.1:5000/vgr/pick_up_and_transport?
machine=vgr_1&start=sink_1&end=oven
ready
Service_OV1_Status_Of_
Light_Barrier_5
isCheckedBy
hasTimestamp
locatedat
FT_Workpiece_X_
Result_1
FT_Workpiece_X Workpiece
Result
hasResult
Oven
isResultOf
2020-03-24T17:12:27
Machine
Cond_WT_1_Check_
Position_Oven_False
Figure 7: Semantic Annotations of the Pick Up and Transport Service from Vacuum Gripper Robot as a Graph.
Transport to
Oven
Review Quality
Transport to
High-Bay
Warehouse
Burn
Get Empty
Bucket
Figure 8: A BPMN Diagram of a Manufacturing Process.
case, the precondition that the workpiece is located
at the working platform on the oven to execute the
burn activity is not met and thus not executed. Af-
ter locating the workpiece at the required place, the
burning procedure is executed immediately. With this
example, we aim to demonstrate the feasibility of our
approach. In the same way, we have also evaluated
the functionality for all other services as well as for
more complex cyber-physical production workflows.
In summary, the example application demonstrates
the feasibility that our SOA is appropriate to exe-
cute SWSs with a state-of-the-art workflow manage-
ment system. Additionally, the re-modeled pre- and
postconditions from OWL-S and WSMO and the un-
derlying concept to determine their verification with
other SWSs is suitable for the presented use cases and
works as designed in near real-time. The developed
SWSs were checked for conformity and correctness
by using the OntOlogy Pitfall Scanner! (OOPS!)
5
. In
this process, no errors or inconsistencies have been
detected.
5 CONCLUSION AND FUTURE
WORK
In this work, we present a Service-Oriented Architec-
ture (SOA) with semantic web services for AI-based
research with physical factory simulation models in
Industry 4.0. First, we described use cases in which
service-oriented architectures with semantic web ser-
vices are valuable. Based on the described use cases,
requirements have been derived that should be met.
As a result, we modeled 70 semantic web services
5
http://oops.linkeddata.es/
Semantic Web Services for AI-Research with Physical Factory Simulation Models in Industry 4.0
41

based on standards such as OWL-S and WSMO. The
semantic services are enriched with inputs, outputs,
preconditions, and results with postconditions. Addi-
tionally, we have integrated our approach in a cyber-
physical business process management architectural
model. In our feasibility test, we have exemplary
demonstrated that the developed SOA is suitable to
be used in state-of-the-art workflow management sys-
tems to build valid cyber-physical production work-
flows. By using semantic web services as pre- and
postconditions of other semantic services, a near real-
time verification for executing cyber-physical work-
flows is ensured. Additionally, the developed services
provide the foundation to support low-code applica-
tions (Sanchis et al., 2020).
In future work, we investigate the described
use cases further to enhance workflow flexibility in
cyber-physical production systems. We assume that
Process-Oriented Case-Based Reasoning (POCBR),
for example, could be used for this purpose because it
has already shown great potential in various other do-
mains. Additionally, automated planning techniques
can be used to further increase workflow flexibility in
Industry 4.0. Therefore, the pre- and postconditions
of the semantic web services can be transferred into a
planning model and directly used during planning. In
this context, we plan to conduct an comprehensive ex-
perimental evaluation that assess the appropriateness
of the presented approach in more detail. With the fu-
ture application, the semantic web services are contin-
uously improved according to their environment and
requirements (see Application & Evolution phase).
ACKNOWLEDGEMENTS
This work is funded by the German Research Founda-
tion (DFG) under grant No. BE 1373/3-3. The basic
components of the semantic web services were devel-
oped in a student research project by Felix Reither and
Julian Sawatzki and revised by Marcel Mischo.
REFERENCES
Abele, E., Chryssolouris, G., Sihn, W., Metternich, J., El-
Maraghy, H., Seliger, G., Sivard, G., ElMaraghy, W.,
Hummel, V., Tisch, M., and Seifermann, S. (2017).
Learning factories for future oriented research and ed-
ucation in manufacturing. CIRP Ann., 66(2):803–826.
Bordel Sánchez, B., Alcarria, R., Sánchez de Rivera, D.,
and Robles, T. (2018). Process execution in Cyber-
Physical Systems using cloud and Cyber-Physical In-
ternet services. J. Supercomput., 74(8):4127–4169.
Boschert, S. and Rosen, R. (2016). Digital Twin—The Sim-
ulation Aspect. In Mechatron. Futur., pages 59–74.
Springer.
Broy, M., Cengarle, M. V., and Geisberger, E. (2012).
Cyber-Physical Systems: Imminent Challenges. In
Large-Scale Complex IT Syst. Dev., Operat. and
Manag. - 17th Monterey Workshop, volume 7539 of
LNCS, pages 1–28. Springer.
Burns, T., Cosgrove, J., and Doyle, F. (2019). A Review of
Interoperability Standards for Industry 4.0. Procedia
Manuf., 38:646–653.
Calà, A., Ryashentseva, D., and Lüder, A. (2016). Modeling
approach for a flexible manufacturing control system.
In 21st Int. Conf. on Emerg. Technol. and Factory Au-
tomat., pages 1–4. IEEE.
Chen, L. and Yang, X. (2005). Applying AI Planning to Se-
mantic Web Services for Workflow Generation. In Int.
Conf. on Semant., Knowl. and Grid, page 65. IEEE.
Cheng, H., Xue, L., Wang, P., Zeng, P., and Yu, H. (2017).
Ontology-based web service integration for flexible
manufacturing systems. In 15th Int. Conf. on Ind. Inf.,
pages 351–356. IEEE.
Ciortea, A., Mayer, S., and Michahelles, F. (2018). Repur-
posing Manufacturing Lines on the Fly with Multi-
agent Systems for the Web of Things. In Proc. of
the 17th Int. Conf. on Autonomous Agents and Multi-
Agent Systems, pages 813–822. Int. Found. for Au-
tonomous Agents and Multiagent Systems / ACM.
Hepp, M., Leymann, F., Domingue, J., Wahler, A., and
Fensel, D. (2005). Semantic business process man-
agement: a vision towards using semantic Web ser-
vices for business process management. In Int. Conf.
on e-Business Eng., pages 535–540. IEEE.
Humm, B., Bense, H., Bock, J., Classen, M., Halvani, O.,
Herta, C., Hoppe, T., Juwig, O., and Siegel, M. (2020).
Applying machine intelligence in practice. Informatik
Spektrum.
Jammes, F. and Smit, H. (2005). Service-Oriented
Paradigms in Industrial Automation. IEEE Trans. Ind.
Inf., 1(1):62–70.
Janiesch, C., Koschmider, A., Mecella, M., Weber, B., Bu-
rattin, A., Ciccio, C. D., Fortino, G., Gal, A., Kan-
nengiesser, U., Leotta, F., Mannhardt, F., Marrella, A.,
Mendling, J., Oberweis, A., Reichert, M., Rinderle-
Ma, S., Serral, E., Song, W., Su, J., Torres, V., Wei-
dlich, M., Weske, M., and Zhang, L. (2020). The
Internet-of-Things Meets Business Process Manage-
ment. A Manifesto. IEEE Syst. Man Cybern. Mag.
Janowicz, K., Haller, A., Cox, S. J., Le Phuoc, D., and
Lefrançois, M. (2019). SOSA: A lightweight ontol-
ogy for sensors, observations, samples, and actuators.
J. Web Semant., 56:1–10.
Järvenpää, E., Siltala, N., Hylli, O., and Lanz, M. (2019).
The development of an ontology for describing the
capabilities of manufacturing resources. J. Intell.
Manuf., 30(2):959–978.
Klein, P. and Bergmann, R. (2019). Generation of Complex
Data for AI-Based Predictive Maintenance Research
With a Physical Factory Model. In 16th Int. Conf. on
Inform. in Control Automat. and Rob., pages 40–50.
SciTePress.
IN4PL 2020 - International Conference on Innovative Intelligent Industrial Production and Logistics
42

Klein, P., Malburg, L., and Bergmann, R. (2019). FTOnto:
A Domain Ontology for a Fischertechnik Simulation
Production Factory by Reusing Existing Ontologies.
In Proc. of the Conf. LWDA, volume 2454, pages 253–
264. CEUR-WS.org.
Lamy, J.-B. (2017). Owlready: Ontology-oriented pro-
gramming in Python with automatic classification and
high level constructs for biomedical ontologies. Artif.
Intell. Med., 80:11–28.
Lasi, H., Fettke, P., Kemper, H.-G., Feld, T., and Hoffmann,
M. (2014). Industry 4.0. BISE, 6(4):239–242.
Lastra, J. L. M. and Delamer, I. M. (2006). Semantic
Web Services in Factory Automation: Fundamental
Insights and Research Roadmap. IEEE Trans. Ind.
Inf., 2(1):1–11.
Lee, J., Kao, H.-A., and Yang, S. (2014). Service Inno-
vation and Smart Analytics for Industry 4.0 and Big
Data Environment. Procedia CIRP, 16:3–8.
Lemaignan, S., Siadat, A., Dantan, J.-Y., and Semenenko,
A. (2006). MASON: A Proposal For An Ontology
Of Manufacturing Domain. In Workshop on Distrib.
Intell. Syst.: Collect. Intell. and Its Appl., pages 195–
200. IEEE.
Lobov, A., Lopez, F. U., Herrera, V. V., Puttonen, J., and
Lastra, J. L. M. (2008). Semantic Web Services frame-
work for manufacturing industries. In Int. Conf. on
Rob. and Biomim., pages 2104–2108. IEEE.
Lu, Y. and Ju, F. (2017). Smart Manufacturing Sys-
tems based on Cyber-physical Manufacturing Ser-
vices (CPMS). IFAC-PapersOnLine, 50(1):15883–
15889.
Marrella, A. (2018). Automated Planning for Business Pro-
cess Management. J. Data Semant.
Marrella, A. and Mecella, M. (2018). Cognitive Business
Process Management for Adaptive Cyber-Physical
Processes. In Bus. Process Manag. Workshops,
LNBIP, pages 429–439. Springer.
Martin, D. L., Burstein, M. H., McDermott, D. V., McIl-
raith, S. A., Paolucci, M., Sycara, K. P., McGuinness,
D. L., Sirin, E., and Srinivasan, N. (2007). Bringing
Semantics to Web Services with OWL-S. World Wide
Web, 10(3):243–277.
McDermott, D. V., Ghallab, M., Howe, A., Knoblock, C.,
Ram, A., Veloso, M., Weld, D., and Wilkins, D.
(1998). PDDL - The Planning Domain Definition
Language: Technical Report CVC TR-98-003/DCS
TR-1165.
Minor, M., Montani, S., and Recio-García, J. A. (2014).
Process-oriented Case-based Reasoning. Inf. Syst.,
40:103–105.
Müller, G. (2018). Workflow Modeling Assistance by Case-
based Reasoning. Springer Fachmedien, Wiesbaden.
Monostori, L. (2014). Cyber-physical Production Systems:
Roots, Expectations and R&D Challenges. Procedia
CIRP, 17:9–13.
Ocker, F., Kovalenko, I., Barton, K., Tilbury, D., and Vogel-
Heuser, B. (2019). A Framework for Automatic Ini-
tialization of Multi-Agent Production Systems Using
Semantic Web Technologies. IEEE Rob. Autom. Lett.,
4(4):4330–4337.
Puttonen, J., Lobov, A., and Lastra, J. L. M. (2013).
Semantics-Based Composition of Factory Automation
Processes Encapsulated by Web Services. IEEE TII,
9(4):2349–2359.
Puttonen, J., Lobov, A., Soto, M. A. C., and Lastra, J. L. M.
(2010). A Semantic Web Services-based approach for
production systems control. Adv. Eng. Inf., 24(3):285–
299.
Puttonen, J., Lobov, A., Soto, M. A. C., and Lastra, J.
L. M. (2019). Cloud computing as a facilitator for
web service composition in factory automation. J. In-
tell. Manuf., 30(2):687–700.
Roman, D., Keller, U., Lausen, H., de Bruijn, J., Lara, R.,
Stollberg, M., Polleres, A., Feier, C., Bussler, C., and
Fensel, D. (2005). Web Service Modeling Ontology.
Appl. Ontol., 1(1):77–106.
Sanchis, R., García-Perales, Ó., Fraile, F., and Poler, R.
(2020). Low-Code as Enabler of Digital Transforma-
tion in Manufacturing Industry. Appl. Sci., 10(1):12.
Schnicke, F., Kuhn, T., and Antonino, P. O. (2020).
Enabling Industry 4.0 Service-Oriented Architecture
Through Digital Twins. In Softw. Archit., volume
1269 of Commun. Comput. Inf. Sci., pages 490–503.
Springer.
Seiger, R., Huber, S., and Schlegel, T. (2018). Toward an
execution system for self-healing workflows in cyber-
physical systems. Softw. Syst. Model., 17(2):551–572.
Sure, Y., Staab, S., and Studer, R. (2009). Ontology Engi-
neering Methodology. In Handb. on Ontologies, Int.
Handb. on Inf. Syst., pages 135–152. Springer.
Zeyen, C., Malburg, L., and Bergmann, R. (2019). Adap-
tation of Scientific Workflows by Means of Process-
Oriented Case-Based Reasoning. In Case-Based Rea-
son. Res. and Dev. - 27th Int. Conf., volume 11680 of
LNCS, pages 388–403. Springer.
Semantic Web Services for AI-Research with Physical Factory Simulation Models in Industry 4.0
43
