
The Estimation of Occupants’ Emotions in Connected and
Automated Vehicles
Juan-Manuel Belda-Lois
1a
, Sofía Iranzo
2b
, Javier Silva
2c
, Begoña Mateo
2d
,
Nicolás Palomares
2e
, José Laparra-Hernández
2f
and José S. Solaz
2g
1
Grupo de Tecnología Sanitaria del IBV, CIBER de Bioingeniería, Biomateriales y Nanomedicina (CIBER-BBN),
Valencia, Spain
2
Instituto de Biomecánica de Valencia, Universitat Politècnica de València, València, Spain
jose.laparra@ibv.org, jose.solaz@ibv.org
Keywords: Connected and Automated Vehicles, Emotion, Dimensional Model, Physiological Signals, Human Centered
Artificial Intelligence.
Abstract: One critical factor of success and user acceptance in connected automated vehicles (CAVs) is trust in
technology, being the main obstacle that remains from a customer’s perspective. Trust in automated systems
is based on feelings of safety and acceptance, being the emotional process the most influential aspect. One of
the main ambitions of SUaaVE project (SUpporting acceptance of automated VEhicle) is to develop an
emotional model to understand the passenger’s state during the trip (in Real-Time), based on body biometrics,
allowing to adapt the vehicle features to enhance the in-vehicle user experience, while increasing trust, and
therefore acceptance. This research addressed a initial experiments to identify changes in the emotional state
of the occupants in different driving experiences (in a driving simulator and in real conditions) by measuring
and analysing the physiological signals of the participants, serving as a basis for the generation of the
emotional model. The results showed that it is possible to estimate the level of Arousal and Valence of the
participants during the journey from the analysis of ECG, EMG and GSR signals. These results have positive
implications for the automobile industry facilitating a better integration of human factor in the deployment of
CAV.
1 INTRODUCTION
Many researchers, experts and companies in the
automobile industry (Sensum, 2020) coincide in
stating that future automated vehicles will be entirely
focused on the passenger experience and
understanding the passenger requirements. Research
on the introduction of emotional passenger state in the
artificial intelligence (AI) of connected and
automated vehicles (CAVs) to make every service
empathic is needed. Yet, nowadays most of the
development is being focusing on the technological
a
https://orcid.org/0000-0002-7648-799X
b
https://orcid.org/0000-0003-2579-7135
c
https://orcid.org/0000-0001-5115-1392
d
https://orcid.org/0000-0003-2633-8993
e
https://orcid.org/0000-0002-4523-341X
f
https://orcid.org/0000-0002-7121-5418
g
https://orcid.org/0000-0002-2058-9591
feasibility of such vehicles without sufficiently
considering the human factor, particularly in the
context of the anticipated vehicle-user interactions
considering the emotions of the occupants. However,
both the science and technology of emotion are still
in relatively youthful states (Sensum, 2020), being
necessary to tackle this topic of research from the
perspective of Human Centered Artificial
Intelligence (HAI).
Emotion state could be obtained through
questionnaires, behaviour analysis and physiological
response. Questionnaires are the most used technique,
262
Belda-Lois, J., Iranzo, S., Silva, J., Mateo, B., Palomares, N., Laparra-Hernández, J. and Solaz, J.
The Estimation of Occupants’ Emotions in Connected and Automated Vehicles.
DOI: 10.5220/0010214802620267
In Proceedings of the 4th International Conference on Computer-Human Interaction Research and Applications (CHIRA 2020), pages 262-267
ISBN: 978-989-758-480-0
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

because of their simplicity, but not adequate to real
time interpretation (Harmon-Jones & Winkielman,
2007). Behavioural analysis, body posture, gaze and
facial gesture can determine some emotions but other
emotions, such as happiness, do not have a clear
behavioural pattern or are recognised at late stages,
such as drowsiness in fatigue.
The emotional response and many cognitive
processes are partially processed unconsciously and
the physiological response analysis allow to access to
the unconscious response (galvanic skin response or
skin conductivity, heart rate, electroencephalography,
facial electromyography, breathing and blood
pressure). The study conducted by Holzinger shows
that physiological data can be used for stress
recognition (Holzinger et al., 2013). In the case of
automotive field, drivers stress has been detected with
galvanic skin response, somnolence with breathing,
fatigue with facial gesture and blinking or distraction
with eye tracking (Tan & Zhang, 2006). Additionally,
there have been great improvements recently
resulting from the shrinking costs and growing
accuracy of biometric sensors such as smart and
wearable devices and non- intrusive (not necessary to
attach sensors) solutions such as recording breathing
with a camera (Laparra Hernández et al., 2019).
Existing work is focused on directly estimating
human emotions based on a number of measures
(Eyben et al., 2010). However, it is not an enough
reliable approach to picture of a person’s state.
Given this context, SUaaVE project (SUpporting
acceptance of automated VEhicle), funded from the
European Union’s Horizon 2020 Research and
Innovation Programme, aims to develop an emotional
model to monitor and interpret the passenger state in
CAVs based on the emotional response. In particular,
this model will be based on the circumplex model of
emotion (Russell, 1980). In his theory, the emotions
are differentiated by their location on a bi-
dimensional space created by the pleasantness-
unpleasantness (Valence) and by the activation
(Arousal). The variation among emotions is
continuous and goes from negative to positive in the
case of the Valence, and from passive to active in the
case of the Arousal. Different emotions can be plotted
in the two-dimensional space as shown in Figure 1.
For example, happy has positive Valence and
medium Arousal while sadness has negative Valence
and low Arousal. Different studies have revealed that
Valence and Arousal can be estimated with psycho
physiologic methods, such as Skin Conductance
Level (SCL), Heart Rate Variability (HRV) or
Electroencephalography (EEG) (Chanel et al., 2007;
Stickel et al., 2009).
In this regard, emotion recognition has been
investigated to characterize the emotional state of
subjects through the analysis of heartbeat dynamics
estimating four possible emotional states based on the
circumplex model (Valenza et al., 2014).
Under this approach, the ambition of SUaaVE is
to build an emotion prediction framework for the
automated vehicle based on the estimation of the
occupants’ state (their values of Arousal and Valence)
through monitoring their physiological responses on
board, by measuring cardiovascular signals, as well
as electrodermal and respiratory activity. All these
biometrics have been identified as capable to
recognize emotions (Shu et al., 2018).
Figure 1: Two-dimensional emotion model based on
Arousal-Valence space and basic emotions
(Jirayucharoensak et al., 2014).
The aim of the article is to identify changes in the
state of the occupants to different driving conditions,
events and traffic environment (through the analysis
of the physiological signal measured), interaciton
with HMI devices and CAV as well as obtaining and
estimation of the values of Arousal and Valence.This
paper presents the results of the initial two
experiments carried out in SUaaVE in a driving
simulator and in a manual car in real conditions.
2 METHODS
2.1 Experiment 1: Measures in a
Driving Simulator
The measurement of the physiological signals in a
driving simulator was conducted in the dynamic
simulator of IDIADA (DiM250 from VI-Grade),
which generates longitudinal, transversal and
rotational acceleration forces up to 2.5 g,
The Estimation of Occupants’ Emotions in Connected and Automated Vehicles
263

characterised by low latency and high-frequency,
replicating a wide range of vehicle dynamics
manoeuvres. The scenario reproduced on the screens
was a circuit around a big city, with fluent traffic, as
observed in Figure 2. The participant was a male in
the range of 30-35 years old, and with no
cardiovascular pathologies. The participant
performed manual driving control during the whole
experiment. During the test, a codriver was also in the
simulator to annotate the timing of the scenario
events.
Figure 2: Dynamic simulator of IDIADA where the
experiment 1 was performed.
The participant was instrumented with the
equipment Biosignals Plux© for the acquisition of the
following physiological signals:
• Electrocardiogram (ECG).
• Electromyography (EMG) of the facial
muscles: Zygomatic and corrugator.
• Galvanic skin response (GSR).
The physiological signals were later processed to
extract a set of key parameters that characterize their
main features. After this, the values of Arousal have
been estimated by a Principal Components Analysis
(PCA) from the parameters of GSR and the HRV of
the Low Frequency Band (0.04 – 0.15 Hz). GSR
reflects the activity of the sweat glands, which
respond to changes in the sympathetic nervous
system. An increase in the level of emotional
activation causes an increase in the level of GSR.
HRV is inversely related to the intensity or emotional
activation. When there is a high cognitive or
emotional demand, the heart shows a steady rhythm
to optimize performance, reducing heart variability.
In contrast, when the person is in a state of relaxation
or low activity, the heart rhythm is more variable,
since it does not need to optimize the body's
performance, thus increasing variability.
With regards to the estimation of the values of
Valence, it was used the key parameter “normalised
average value of activated frames” of EMG, taking
into account that the zygomatic activation is mainly
related to a positive Valence, whereas the corrugator
activation corresponds to a negative Valence.
2.2 Experiment 2: Measures in Real
Conditions
This experiment consisted on the measurement of the
physiological signals of a co-driver, which is the most
similar to a passenger traveling in a CAV. The
participant was a female in the range of 30-35 years
old, and with no cardiovascular pathologies. She
performed an urban journey by car in the city of
València (Spain) one morning of a weekday with
variable weather.
In this case, the physiological signals were
acquired by Empatica E4© wristband (allowing an
unobtrusive monitoring of the driver), measuring the
Blood Volume Pulse (BVP), from which heart rate
variability can be derived (Figure 3).
Figure 3: Empatica E4© wristband.
During the experiment, the participant annotated
the timing of any event on road. Furthermore, it was
developed an online questionnaire (through Google
Forms©) so that the co-driver pointed out, for each
event, their emotional state through values of Valence
and Arousal. The questionnaire follows the Self-
Assessment Manikin (SAM) scale (Bradley & Lang,
1994), being the most appropriate to gather the
emotional perception from subjects. The used scale
consists of five pointers that relate directly to the
Valence (positive or negative impact of the event) and
the Arousal (level of excitement reached because of
the event). Figure 4 shows the questionnaire used to
SUaaVE 2020 - Special Session on Reliable Estimation of Passenger Emotional State in Autonomous Vehicles
264

assign values and characterize the emotion in each
event.
The data acquired in real conditions were
processed following the same methodology used for
the data gathered in the experiment 1 with the
dynamic simulator. The components of the HRV have
been splitted by tree band-pass 3 order Butterworth
filters in Very Low Frequency (VLF), Low
Frequency (LF) and High Frequency (HF) with the
common frequencies (0.04 Hz, 0.12 Hz and 0.40 Hz).
Per each component 1 minute moving average of the
square of the signal has been analysed.
Figure 4: Google forms questionnaire (following SAM
scale) used to evaluate the Valence and Arousal
respectively of the co-driver in each event.
3 RESULTS
3.1 Experiment 1
The values of Arousal and Valence and their
combination with respect to the events of the scenario
simulated were observed. Figure 5 shows these
results represented in the circumplex model. From the
data it can be observed that different values of
Arousal and Valence are obtained depending on the
type of event on road.
In general, the Arousal levels are higher for
negative Valence. This effect was expected because
people are more reactive to negative stimulus in the
virtual reality. Going into detail, the “Fog” event and
the “Risky overtaking” were the ones eliciting the
highest Arousal, whereas the event when the vehicle
passed through a section of road with guardrails
obtained the lowest values.
Concerning the Valence, taking a curve was the
one eliciting the highest Valence. This can be
explained because the driver liked sport driving and
the curve was taken appropriately. On the other hand,
the lowest value of Valence corresponds to the “First
breaking”, possibly due to lack of experience of
driving in a simulator at the beginning of the
experiment.
Figure 5: Values of Arousal and Valence obtained from the
physiological signals acquired in the experiment 1 with the
dynamic simulator.
3.2 Experiment 2
The Figure 6 shows the values of HRV for the whole
trip. The first result is that there is noticeable variation
of HRV for each event of the road. In general, it can
be seen that HRV decreases (or the Arousal value
decreases) as there is an event. This fact is especially
remarkable with the events of low visibility, when
there is heavy rain, or there is a risk of collision with
another car, all with a decrease of Arousal values.
The moving average of 1 minute of each
component of the HRV provides reliable
measurements of the Arousal and the Valence
declared by the user. In particular the VLF band is in
good agreement with the Arousal (Figure 7) and the
ration between the HF and LF band is in good
agreement with the Valence (Figure 8).
As can be seen in SAM (Figure 4), the scale of
Arousal moves from high Arousal (value 1) to low
Arousal (value 5). Therefore, the relationship for the
HRV is that the VLF decreases as the Arousal
increases, as expected from previous results in the
scientific literature.
The Valence scale in SAM (Figure 4) moves from
positive Valence (value 1) to negative Valence (value
5). Therefore, the it is a direct relationship a higher
ratio implies a more positive Valence (Figure 7).
Arousal
Active (high)
Passive (low)
Valence
Positive (high)
Negative (low)
Fog
Risky overtaking
Darkness
Curve
First breaking
Other car approaches
Guardrail
Breaking
The Estimation of Occupants’ Emotions in Connected and Automated Vehicles
265
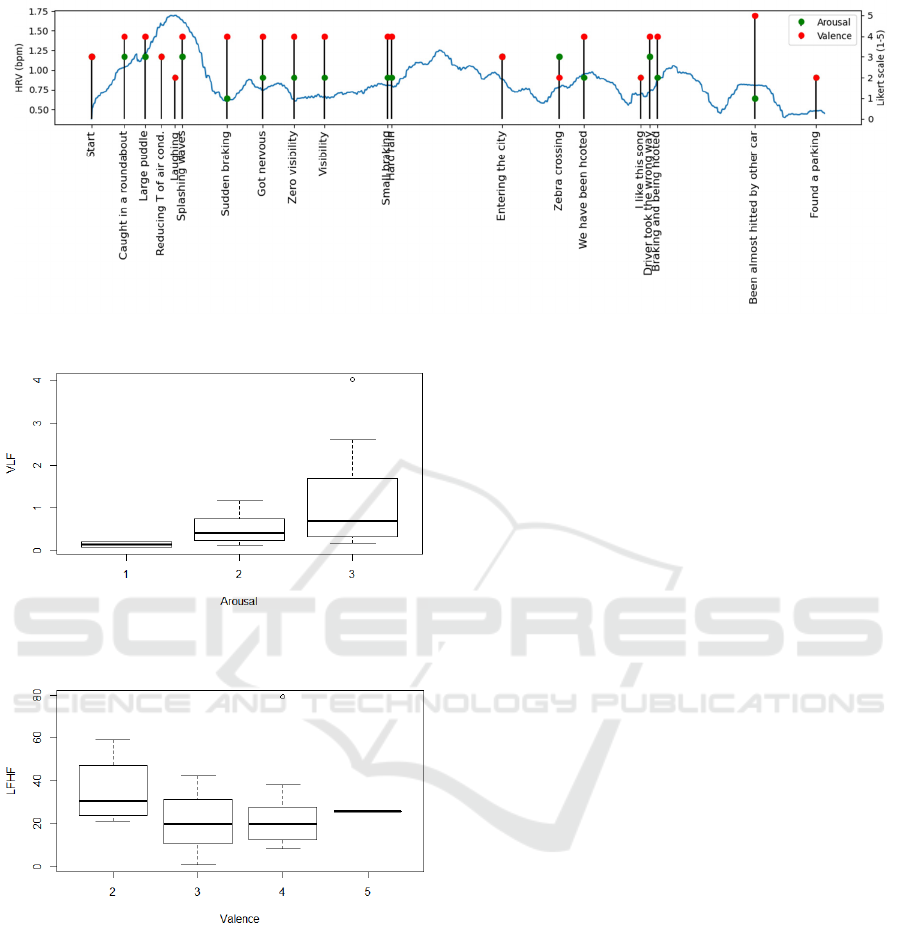
Figure 6: HRV along the experiment and emotional components (Arousal and Valence) declared by the user in each event.
Figure 7: Relationship between the Very Low Frequency
Component and the Arousal declared by the user.
Figure 8: Relationship between Valence and the Ratio of
HF and LF bands.
4 DISCUSSION
These experiments aimed to find out whether it is
possible to identify changes in the state of driver to
different driving conditions, events and traffic
environment through the analysis of the physiological
signals. The results obtained in both experiments
showed that key parameters of ECG, EMG and GSR
can to detect variations of the state of the driver and
therefore estimate their emotional state by calculating
the values of Arousal and Valence.
However, it is worth mentioning that these results
are only preliminary and present certain limitations in
samples and types of scenarios on road. A higher
sample of participants, gender balance, driver
experience and personal factors & preferences will be
considered in the tests with subjects to be conducted
in the next stage of SUaaVE in the Human
Autonomous Vehicle (HAV) at IBV, a dynamic
driving simulator, which offer high level immersive
experiences on board. This will allow to obtain a
reliable model capable to provide an accurate
estimation of the values of Arousal and Valence.
The results of this initial experiments have
positive implications for the automotive field,
especially on CAV experience. By measuring and
analysing the biometric data of the occupants, the
emotional model will be able to estimate the emotion
and reactions of the people in a vehicle, opening the
possibility of analyzing travelers’ emotions all along
the journey in real time. In short, the approach set out
will enable that the automated vehicles will
understand how we feel and use such information to
make system more empathic, responding to the
occupant emotions in real time.
The development of the empathic module will
provide OEMs and Tier 1 suppliers a detailed
characterization of the passenger needs, enabling
them the development of strategies to enhance the in-
cabin experiences. This opens multiple possibilities to
tailor the travel experience such as:
• Intelligent adjustment of vehicle
movements.
• Offer services such as the personalization of
entertainment content.
SUaaVE 2020 - Special Session on Reliable Estimation of Passenger Emotional State in Autonomous Vehicles
266

• Improve the interaction with interfaces and
virtual assistants on-board.
Therefore, this empathic approach presented will
revolutionize the transportation through the analysis
of physiological (biometric) and contextual
(environmental) data, fused together to improve the
understanding the emotional state of the passenger.
This will allow to respond to the user in an
appropriate way, establishing trust between people
and automated vehicles, as well as enhance the in-
cabin and personalized experience. Furthermore, the
empathic module can be applied, not only to cars but
also to other means of transport such as buses, trucks,
planes, ships, to understand the experience of the
occupants and provide tailored services accordingly.
5 CONCLUSIONS
The results of the current experiment validate that it
is possible to detect changes in the state of the
occupants on board from physiological signals. The
extraction and analysis of key parameters of ECG and
EMG allows to obtain the values of Arousal and
Valence and therefore estimate their emotional state.
These results have positive implications for the
automobile industry enabling that CAVs will
understand how we feel and use such information to
make system more empathic, responding to the
occupant emotions in real time, and therefore
enhancing the CAV acceptance.
Future tests with subjects in the immersive
Human Autonomous Vehicle (HAV) will allow to
generate in SUaaVE project a reliable emotional
model, being more sensitive to differences in gender
perspective, driving experience and personal profile.
ACKNOWLEDGEMENTS
The paper presents the overall objective and the
methodology of the project SUaaVE (SUpporting
acceptance of automated VEhicle), funded from the
European Union’s Horizon 2020 Research and
Innovation Programme under Grant Agreement No
814999.
REFERENCES
Bradley, M. M., & Lang, P. J. (1994). Measuring emotion:
The self-assessment manikin and the semantic
differential. Journal of behavior therapy and
experimental psychiatry, 25(1), 49–59.
Chanel, G., Ansari-Asl, K., & Pun, T. (2007). Valence-
arousal evaluation using physiological signals in an
emotion recall paradigm. 2007 IEEE International
Conference on Systems, Man and Cybernetics, 2662–
2667.
Eyben, F., Wöllmer, M., Poitschke, T., Schuller, B.,
Blaschke, C., Färber, B., & Nguyen-Thien, N. (2010).
Emotion on the road—Necessity, acceptance, and
feasibility of affective computing in the car. Advances
in human-computer interaction, 2010.
Harmon-Jones, E., & Winkielman, P. (2007). Social
neuroscience: Integrating biological and psychological
explanations of social behavior. Guilford Press.
Holzinger, A., Bruschi, M., & Eder, W. (2013). On
interactive data visualization of physiological low-cost-
sensor data with focus on mental stress. International
Conference on Availability, Reliability, and Security,
469–480.
Jirayucharoensak, S., Pan-Ngum, S., & Israsena, P. (2014).
EEG-based emotion recognition using deep learning
network with principal component based covariate shift
adaptation. The Scientific World Journal, 2014.
Laparra Hernández, J., Izquierdo Riera, M. D., Medina
Ripoll, E., Palomares Olivares, N., & Solaz Sanahuja,
J. S. (2019). Dispositivo Y Procedimiento De Vigilancia
Del Ritmo Respiratorio De Un Sujeto.
https://patentscope.wipo.int/search/es/detail.jsf?docId=
WO2019145580&tab=PCTBIBLIO
Russell, J. A. (1980). A circumplex model of affect. Journal
of personality and social psychology, 39(6), 1161.
Sensum. (2020, September 21). Empathic AI for smart
mobility, media & technology (https://sensum.co/)
[Text/html]. Sensum; Sensum. https://sensum.co
Shu, L., Xie, J., Yang, M., Li, Z., Li, Z., Liao, D., Xu, X.,
& Yang, X. (2018). A review of emotion recognition
using physiological signals. Sensors, 18(7), 2074.
Stickel, C., Ebner, M., Steinbach-Nordmann, S., Searle, G.,
& Holzinger, A. (2009). Emotion detection:
Application of the valence arousal space for rapid
biological usability testing to enhance universal access.
International Conference on Universal Access in
Human-Computer Interaction, 615–624.
Tan, H., & Zhang, Y.-J. (2006). Detecting eye blink states
by tracking iris and eyelids. Pattern Recognition
Letters, 27(6), 667–675.
Valenza, G., Citi, L., Lanatá, A., Scilingo, E. P., & Barbieri,
R. (2014). Revealing real-time emotional responses: A
personalized assessment based on heartbeat dynamics.
Scientific reports
, 4, 4998.
The Estimation of Occupants’ Emotions in Connected and Automated Vehicles
267
