
Reinforcement Learning of Robot Behavior based on a Digital Twin
Tobias Hassel
a
and Oliver Hofmann
b
Faculty of Electrical Engineering, Technical University Nuremberg, Keßlerplatz 12, Nuremberg, Germany
Keywords: Reinforcement Learning, Digital Twin, Unity.
Abstract: A reinforcement learning approach using a physical robot is cumbersome and expensive. Repetitive execution
of actions in order to learn from success and failure requires time and money. In addition, misbehaviour of
the robot may also damage or destroy the test bed. Therefore, a digital twin of a physical robot has been used
in our research work to train a model within the simulation environment Unity. Later on, the trained model
has been transferred to a real-world scenario and used to control a physical agent.
1 INTRODUCTION
Smart solutions for production processes are key for
a competitive manufacturing industry. While the
number of multipurpose industrial robots has
significantly increased (Roland Berger Strategy
Consultants, 2014), the adaption of robot behavior to
frequently changing processes is still time-
consuming.
Machine learning offers a promising approach to
reduce the adaption effort. Due to the lack of new
process training data, reinforcement learning
algorithms have to be used to explore an efficient
robot behavior strategy based on trial and error.
However, an error in an industrial shop floor
environment may result not only in damaged goods
and equipment, but also (possibly deadly) injuries.
Thus, the exploration has to be done in a simulated
environment by the robot's digital twin. The findings
of that exploration lead step by step to a successively
improved behavior model.
Later on, the trained behavior model can be used
to control the physical robot with the best practices
that have been discovered during the simulation and
to avoid the detected misbehaviors. In contrary to the
simulation domain, the robot's behavior is shifted
from explore to exploit.
Within this paper, we show the soundness of this
approach using a prototype based on the physical
robot Cozmo that is usually used as an educational toy
a
https://orcid.org/0000-0002-3135-4923
b
https://orcid.org/0000-0002-9714-9869
in student AI classes (Touretzky, D., Gardner-
McCune, C., 2018). The digital twin was built and
operated within the Unity development platform.
While originally designed as a workbench for 3D
game development, the platform has been evolving to
a serious simulation tool. The open source Unity ML-
Agent Toolkit provides the architecture to train digital
twins (Juliani, A., et al., 2018).
As a testing scenario the robot's task is to follow a
line which is printed on the floor. As long as the line
can be detected the robot tries to follow it. Otherwise
the attempt is reset and restarted.
2 ROBOT
2.1 Cozmo
Cozmo is a small toy robot produced by a company
called Anki. It is equipped with a caterpillar drive, a
lift and a small 128x64 pixel display. In addition, it
has sensors like a camera, a cliff sensor and an
accelerometer. The robot also creates a WIFI network
for other devices (e.g. mobile phones) to connect.
Besides the physical robot, Anki also provides an
appropriate open source Python SDK in order to
interact with it. A few lines of code can be used to get
the raw data from Cozmo's sensors or control its
movement. (Anki, 2019a; Anki, 2019b)
Hassel, T. and Hofmann, O.
Reinforcement Lear ning of Robot Behavior based on a Digital Twin.
DOI: 10.5220/0008880903810386
In Proceedings of the 9th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2020), pages 381-386
ISBN: 978-989-758-397-1; ISSN: 2184-4313
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
381
2.2 Actions
Cozmo is primarily designed to work as a virtual
companion. Therefore, its behavior creates the
impression of a personality. For this purpose, it is for
instance able to recognize different human faces and
to differentiate between cats and dogs.
However, the most important actions for the
approach of following a line are movement, taking
pictures and setting the lift as well as the head height.
While positioning the robot's lift and head is only
needed at the start to get an optimal view of the scene
in front of the robot, the real challenge is the
permanent control of the movement.
In order to keep things simple, the movement was
limited to a finite set of actions. Consequently, the
robot was forced to use one of the predefined actions
move forward, turn left, turn right or stop. Each of
these options can only be carried out in a certain speed
that is given by the physics of the engine and the
geometry of the robot itself. Turn left and turn right
lead to a short speed difference of the left and the right
caterpillar resulting in a slight change of the robot's
heading of only a few degrees.
2.3 Observations
One of the robot's sensors is a camera, which can be
found in the bottom half of its head and whose
pictures are accessible via SDK after subscribing to
the proper event.
The robot needs its camera to identify the line
drawn on the ground in front of it. Accordingly, the
head height must be set to the minimum to let the
camera focus on the ground. Additionally, the lift is
not allowed to cover the line and must be set to the
maximum height.
As a result, the camera shows a 640x480 pixel
image of the line on the ground, which can be used as
state information for reinforcement learning.
3 DIGITAL TWIN
3.1 Unity
A 3D-model of the robot was used to visualize the
digital twin in Unity. This scaled CAD-model was
originally created in Tinkercad, an online CAD-
program (Gearcortex, 2018).
After reducing the number of the model's
polygons, it was imported into Unity. Based on this
3D-data, the virtual camera was placed. The position
corresponds to the spot within the real robot. In
addition, the Cozmo SDK was used to get the head
angle from the physical robot in order to replicate it
on the virtual camera.
A comparison between the image of the virtual
and the real camera was made. For this purpose, an
object was positioned right on the edge of the
particular camera's field of view. Afterwards, the
distance between the object and the specific camera
was measured. As a result, the virtual camera was
adjusted to match the real-world camera.
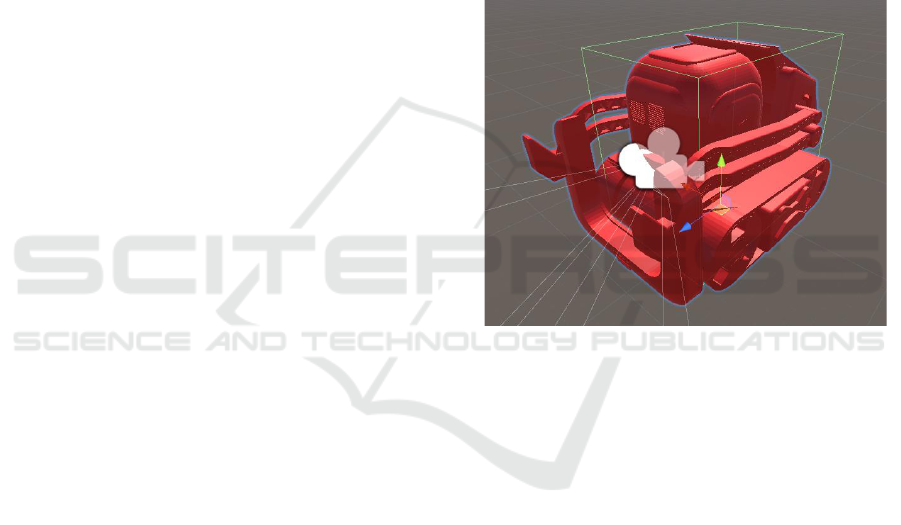
Finally, the Unity components Boxcollider and
Rigidbody were added to the digital twin. These
scripts ensure that the virtual Cozmo can be moved.
Moreover, it can collide with other objects in the
Unity scene (Fig. 1).
Figure 1: Model of the Digital Twin.
3.2 Actions
The virtual Cozmo uses the same discrete action
space as the physical robot. The actions correspond
with the movement states of the real robot, namely
move forward, turn left, turn right and stop.
In order to reproduce the different possibilities in
the virtual environment, the exact movement
characteristics of the real robot must be known. The
API can indeed be used to set the speed of the
physical robot. However, to achieve proper results the
actual behavior has been measured. This applies to
both, the forward motion and the rotary motion.
In order to simulate this speed in virtual mode, a
distance was defined. The times which the real as well
as the virtual Cozmo needed to complete the distance
were measured. By comparing the required times of
the robots, the speed of the virtual robot was adjusted
until the times coincided.
The same procedure was performed for the
rotation speed. It is for this reason that a fixed rotation
has been set for the real robot to complete. In addition,
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
382
the required time was recorded. The virtual robot was
then parameterized so that it could complete the same
rotation at the identical speed.
3.3 Observations
The agent must be aware of the world’s state.
Therefore, the robot needs to keep an eye on the
environment around it.
In our case, a visual observation was used that
mimics the camera image of the real robot. With the
help of a virtual camera, which renders its image into
a texture, the state of the environment can be
observed. In this case, the texture offers the same
resolution as the real camera. Additionally, the
camera must be aligned at the same position and angle
to the ground as its real-world equivalent.
4 LEARNING APPROACH
4.1 Definitions
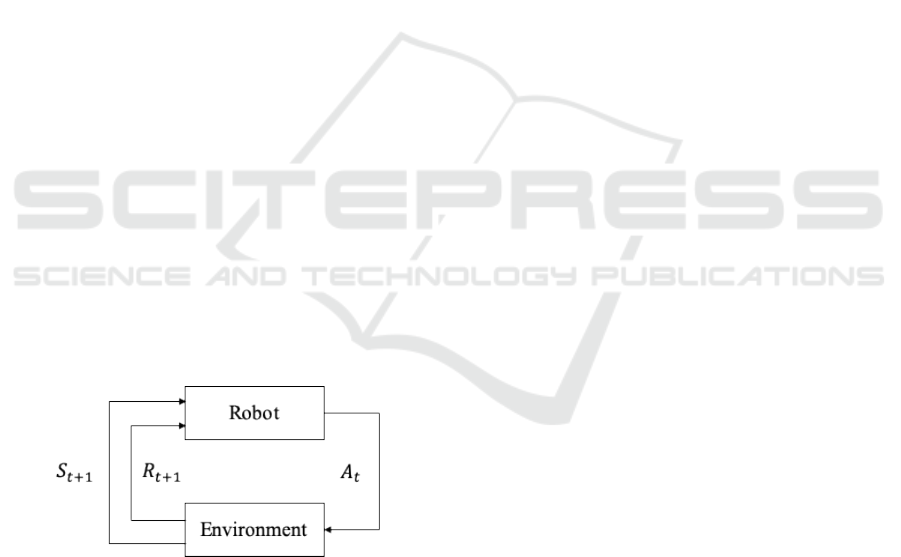
The sensors of the robot define a set of possible states
of the environment. At each time the robot receives
information about the state
of the environment
from its sensors.
The robot then has to select an action
out of the
given set of actions
The selection of
is based on the reward
for
the robot's actions
in a given state
leading to a
new state
at time .
Figure 2: Robot-Environment Interaction.
4.2 Reinforcement Learning
As long as the environment's behavior can be
depicted with a known deterministic function
The action
can be easily chosen as that action
which leads to the maximum sum of all future
rewards. But in reality, this function is often neither
known nor deterministic.
To keep it simple, in the robot domain we
postulate a deterministic environment, i.e. an action
at a state
will always result in a specific
subsequent state
with a reward
given by a
well-known reward function :
Further, we expect the reward
to deliver a
proper indication of all future rewards due to the lack
of hidden shortcuts in our domain. Therefore, the
function only has to estimate the reward
,
because no follow up calculation of future rewards
based on
is needed.
However, at the beginning of the robot's training,
we do not know the deterministic outcome of any
action
at a state
. In order to maximize the sum
of all future rewards, the robot has to predict the
reward of any action
at hand. Therefore, the
unknown function is approximated by a neural
network that is trained with the experiences which
have been made during the ongoing trial-and-error
attempts.
At first glance it seems obvious for the robot
always to select that
which has the expected max
sum of future rewards. In doing so, we exploit the
knowledge of our trained model. The physical robot
should follow this policy to avoid damage and
injuries.
During the training of the estimating neural
network, this behavior is not optimal, because
undiscovered actions are then less attractive than
actions providing a low positive reward. As a
consequence, the search for best solutions is
narrowed to already tested actions. Thus, the digital
twin has the permission to select from time to time
unreasonable actions in order to explore new
behavioral patterns (Sutton, R., Barto, A., 2018, p. 3).
4.3 Implementation
4.3.1 System Architecture
For the approximation of the function we use a
learning model. As input we provide the current state
of the robot given by the image of the robot's camera.
During the training phase, the virtual robot performs
an action and the resulting new state is rated. This
calculated reward is the expected outcome of the
learning model.
After a sufficient amount of training the model
can estimate the expected reward in a given state for
any action. At this time, the model can be used to
Reinforcement Learning of Robot Behavior based on a Digital Twin
383
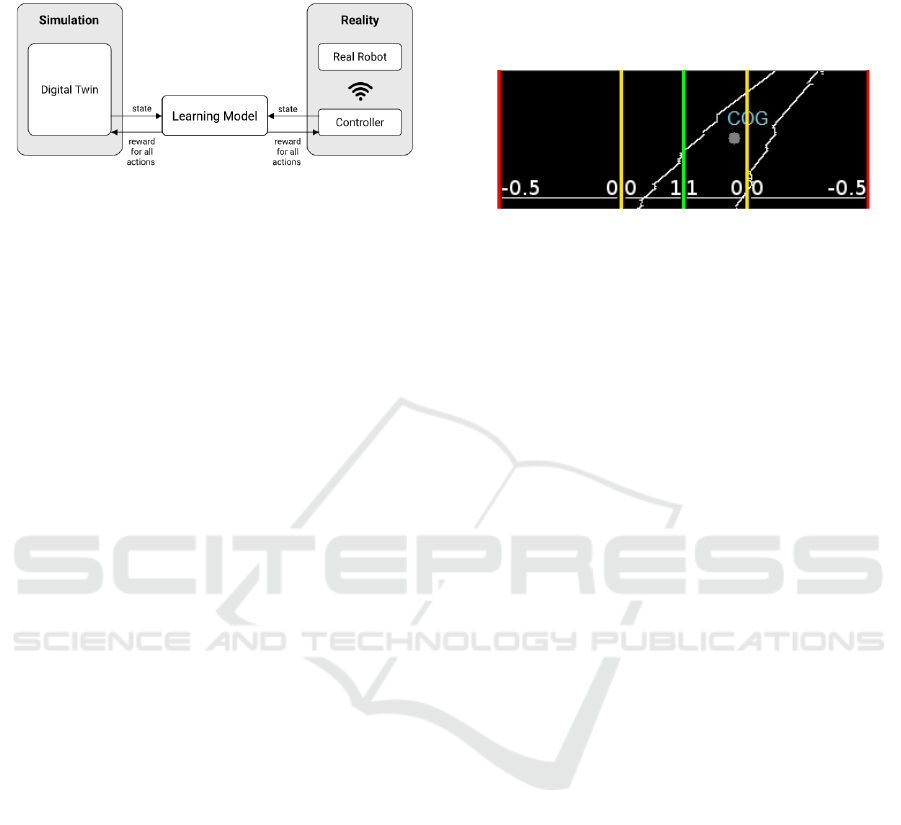
control the "real" physical robot. Therefore, a
standardized interface to both robots is applied (fig. 3).
Figure 3: System Architecture.
The learning model is implemented as a neural
network in TensorFlow, an open source machine
learning library. In addition, the training process can be
visually displayed and monitored with TensorBoard.
This program allows weak points in the choice of
hyperparameters for training to be identified and
subsequently adjusted. (Unity Technologies, 2019a)
4.3.2 Data Preprocessing
The robot's state is given by the camera image. To
reduce the learning effort the image is preprocessed to
shrink the image's complexity and to focus on the
essential data. These preprocessing operations must be
performed for both the real and the virtual camera
image.
First, the image is cropped. Therefore, the upper
and the lower part of the image are cut off. As a result,
the unimportant information of the image is omitted.
For example, curves that are far away but still visible
to the camera are neglected, because they would
otherwise affect the robot's path.
After the image has been cropped, the Canny
algorithm is applied. This algorithm is used for edge
detection and converts the result to a binary image. The
edges are displayed as white pixels while the rest
remains black. This step will be needed later for the
reward function.
Finally, the resolution of the resulting texture is
reduced so that the final image consists of 80x30
pixels.
The same processing steps are carried out for the
camera image of the real robot as for the visual
observation of the simulation.
4.3.3 Rewards
The robot has to receive positive feedback for
following the line. Based on the preprocessed image a
reward function was defined. The binary image is used
to calculate the Center Of Gravity (COG) of the white
pixels (fig. 4).
In a binary image, the COG can be computed
efficiently. The average of the white pixels' X- and Y-
coordinates in the image is calculated. The resulting
point with the average X- and Y-coordinates is called
COG. (Mallick, 2018)
Figure 4: Center Of Gravity (COG).
If the COG is further to the right of the image, we
know that there is a right curve in front of the robot.
The same is true for the other direction. If COG is
located exactly in the middle of the image, a positive
reward of 1 is passed on to the robot. The further away
the COG is from the center of the image, the lower the
reward will be. If the position of the COG reaches one
of the turning points marked in yellow in Figure 4, the
reward changes from positive to negative. Again, the
reward changes as the COG approaches the edge of the
image. However, the negative reward gets bigger and
bigger and rises up to -0.5 at the edge of the image. If
the COG is outside the image, i.e. no longer
recognizable, a fixed reward of -1 is awarded. In
addition, the virtual robot is reset to its training start
point.
Further, small rewards were awarded for different
actions. So, for every decision the digital twin makes,
a small negative reward was forwarded to the agent to
tempt him to find the fastest way. In addition, the move
forward action was given a positive reward, while all
other actions were given small negative rewards. The
reason for this was that the agent should not learn to
turn from right to left on the spot in order to maximize
his reward.
4.4 Evaluation
In order to evaluate the trained model, a test track was
created on a 70cm x100cm paper sheet (Fig. 5).
The test track intentionally lacks sharp curves due
to the robot's limited vision capabilities. The
evaluation is based on several attempts with changing
starting position and direction
(clockwise/counterclockwise).
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
384
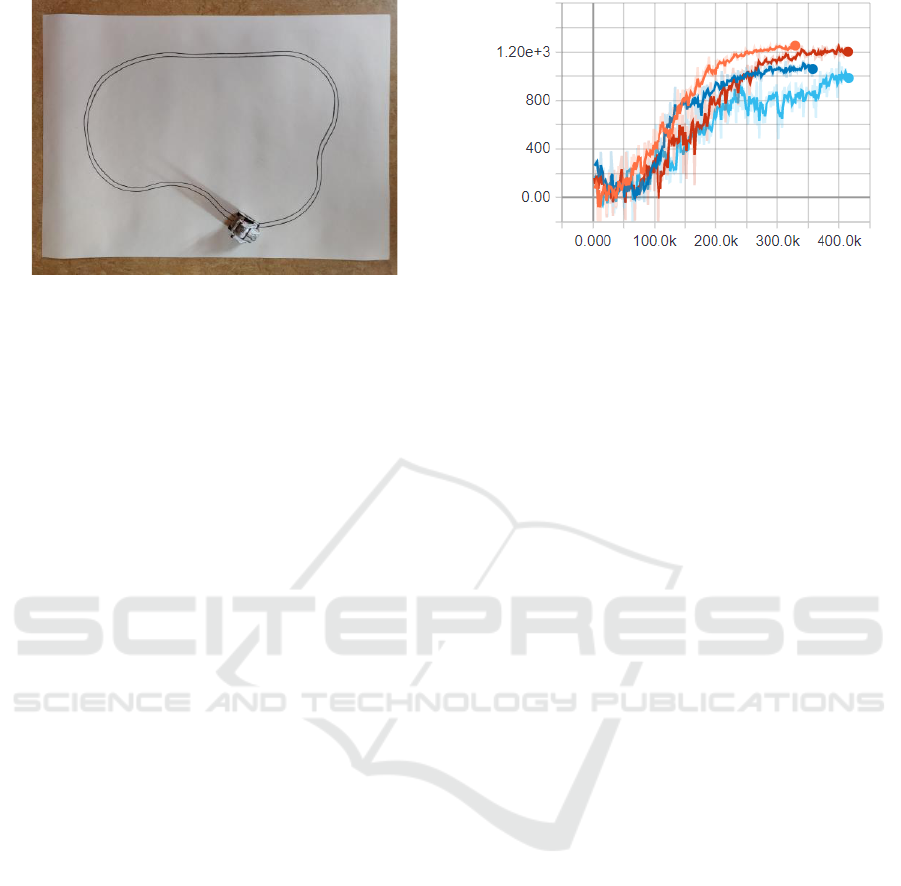
Figure 5: Test Track.
4.4.1 Line Tracking
Based on our approach the physical robot was able to
follow a line using a learning model that was trained
with its digital twin.
The robot's movement was quite slow due to the
selection of the stop action which took more time in
the real robot than in the simulation and consequently
influenced the other actions. Therefore, the action
was taken out, so that the robot only had the
possibility to move or rotate but not to stop.
However, a kind of trembling was observed in the
real Cozmo. Too often a left turn came after the
decision to drive right and the other way around in
order to mitigate the effects of the last action.
4.4.2 Improvements
This is why a so-called action mask was introduced
for the next training. With the help of such a mask it
is possible to forbid the robot specific actions after a
previous one was executed. This method was used to
give the robot a kind of memory about its last actions.
If there is a decision to move to the left among its last
actions, it is not allowed to move to the right.
Finally, four models with different memory sizes
were trained and compared. The following illustration
shows a training graphic of the models supplied by
Tensorboard.
The first trained model without any action mask is
visualized by the orange plot in Fig. 6. The model
with adapted action mask and a memory size of one
is represented by the dark blue plot. The colors red
and light blue show the training process for the last
trained models with the memory sizes three and five
respectively.
Figure 6 shows the cumulative reward of each
environment step. A run consists of a maximum of
1500 single steps, which means that the maximum
cumulative reward per episode is 1500.
Figure 6: Cumulative Reward.
It can be seen that the model trained first achieves
the highest cumulative reward fastest, while the light
blue plot with memory size five scores the weakest.
The only serious competition measured by
cumulative reward is the model that considers the last
three actions.
Based on several tries in reality, the training
results of the Unity simulation have been approved:
the introduction of an action mask based on a memory
of its last actions downgrades the robot's ability to
drive curves. The robot can drive curves worse the
larger its memory is designed.
Overall, it turned out that very sharp curves were
a problem for the robot, no matter which model was
used.
5 CONCLUSION
In summary it can be said that it is possible to use
Unity as a simulation environment and to transfer the
resulting model to the real robot. The training can
thus be made more cost-effective and less time-
consuming than it would be without a simulation. The
project demonstrates that it is also possible to use
reinforcement learning with simple means for
realistic application cases.
In addition, the project can be further improved,
for example by using a continuous action space for
the model. The hyper parameters can also be adjusted
to make the training process more effective.
Further, the current status of the project uses the
frame rate of the robot's camera as the decision
frequency. This means that 30 decisions are made per
second on how to proceed. This frequency can be
reduced to achieve better results and to mitigate the
trembling.
Currently, the calculation of the reward is based
on a single image. In further work, the reward could
be calculated using a moving average of the COG
based on the last several images. This approach
Reinforcement Learning of Robot Behavior based on a Digital Twin
385

avoids the usage of action masks and memory,
mitigates trembling but also allows subsequent turns
at sharp curves.
REFERENCES
Anki, 2019a. Die Technik. Retrieved 2019-09-15 from
https://anki.com/de-de/cozmo/cozmo-tech.html
Anki, 2019b. The Future of Consumer Robotics -Now.
Retrieved 2019-08-31 from https://developer.anki.com/
Gearcortex, 2018. Anki Cozmo. Retrieved 2019-09-24
from https://www.tinkercad.com/things/diQp4OfpRl6
Juliani, A., et al.., 2018. Unity: A General Platform for
Intelligent Agents. arXiv:1809.02627 [cs.LG]
Mallick, S., 2018. Find the Center of a Blob (Centroid)
using OpenCv (C++/Python). Retrieved 2019-09-28
from https://www.learnopencv.com/find-center-of-
blob-centroid-using-opencv-cpp-python/
Roland Berger Strategy Consultants, 2014. Industry 4.0,
The New Industrial Revolution: How Europe Will
Succeed. International Conference The Next Industrial
Revolution Manufacturing and Society in the XXI
Century,Turin
Sutton, R., Barto, A., 2018. Reinforcement Learning, MIT
Press, Cambridge, 2
nd
edition.
Touretzky, D., Gardner-McCune, C., 2018. Calypso for
Cozmo: Robotic AI for Everyone. 49th ACM Technical
Symposium on Computer Science Education, Baltimore
Unity Technologies (2019a). Background: TensorFlow.
Retrieved 2019-09-23 from https://github.com/Unity-
Technologies/ml-
agents/blob/master/docs/Background-TensorFlow.md
Unity Technologies (2019b). Learning-Environment-
Design-Agents. Retrieved 2019-09-16 from
https://github.com/Unity-Technologies/ml-
agents/blob/master/docs/Learning-Environment-
Design-Agents.md
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
386
