
Topological Visualization Method for Understanding the Landscape of
Value Functions and Structure of the State Space in
Reinforcement Learning
Yuki Nakamura
1 a
and Takeshi Shibuya
2 b
1
Graduate School of Systems and Information Engineering, University of Tsukuba, 1-1-1 Tennodai, Tsukuba, Japan
2
Faculty of Engineering, Information and Systems, University of Tsukuba, 1-1-1 Tennodai, Tsukuba, Japan
Keywords:
Reinforcement Learning, Topological Data Analysis, TDA Mapper, Visualization.
Abstract:
Reinforcement learning is a learning framework applied in various fields in which agents autonomously ac-
quire control rules. Using this method, the designer constructs a state space and reward function and sets
various parameters to obtain ideal performance. The actual performance of the agent depends on the design.
Accordingly, a poor design causes poor performance. In that case, the designer needs to examine the cause of
the poor performance; to do so, it is important for the designer to understand the current agent control rules.
In the case where the state space is less than or equal to two dimensions, visualizing the landscape of the value
function and the structure of the state space is the most powerful method to understand these rules. However,
in other cases, there is no method for such a visualization. In this paper, we propose a method to visualize
the landscape of the value function and the structure of the state space even when the state space has a high
number of dimensions. Concretely, we employ topological data analysis for the visualization. We confirm the
effectiveness of the proposed method via several numerical experiments.
1 INTRODUCTION
Reinforcement learning, in the field of machine learn-
ing is a learning framework that autonomously ac-
quires control rules to maximize the rewards from the
environment via the trial and error of agents (Sutton
and Barto, 1998; Matari
´
c, 1997). As a result, it is
possible to lighten the burden on designers of design-
ing complex algorithms (Smart and Pack Kaelbling,
2002).
When acquiring control rules via reinforcement
learning, the designer needs to set up the environment,
learning methods, and parameters; the environment
consists of the state spaces and reward functions, and
the parameters include the learning rates, rates of ex-
ploration and exploitation, and discount rates. Agents
learn by repeated exploration and exploitation under
given circumstances. Therefore, the performance
of the acquired control rules changes depending the
design. If the performance required by the designer
cannot be obtained, it is necessary to investigate the
cause of this failure. Then, the environment, learn-
a
https://orcid.org/0000-0001-9922-890X
b
https://orcid.org/0000-0003-4645-5898
ing method and parameters are reconstructed
and reinforcement learning is performed. By repeat-
ing this cycle, the agent aims to gain the performance
required by the designer. In other words, it is neces-
sary to have a method to investigate causes when the
required performance cannot be obtained.
For such an investigation, it is necessary to under-
stand how the learning is being performed at that time,
that is, it is important to understand the control rules
of the agent. There are several ways to determine this.
Commonly used methods include examining the sum
of rewards acquired for each episode, examining the
control rules of the agent heuristically, and examining
the landscape of the value function and the structure
of the state space. Even though the learning progress
can be understood via a method examining the total
sum of rewards acquired for each episode, it is im-
possible to know why the required performance can-
not be obtained if the rewards cannot be acquired. In
the heuristic method, when the state space is compli-
cated, there are many situations that need to be exam-
ined, which requires a great deal of trials and errors.
In the case where the state space is less than or equal
to two dimensions, visualizing the landscape of the
370
Nakamura, Y. and Shibuya, T.
Topological Visualization Method for Understanding the Landscape of Value Functions and Structure of the State Space in Reinforcement Learning.
DOI: 10.5220/0008913303700377
In Proceedings of the 12th International Conference on Agents and Artificial Intelligence (ICAART 2020) - Volume 2, pages 370-377
ISBN: 978-989-758-395-7; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
value function and the structure of the state space is
the most powerful method to understand the control
rules of the agent. This is because, we can visually
understand the progress of the explore and the evalu-
ation of the state. In this paper, we aim to be able to
understand the control rules of the agent by focusing
on the landscape of the value function and the struc-
ture of the state space. When the state space is low di-
mensional, visualization techniques can represent the
landscape of the value function and the structure of
the state space; however, when the state space is high
dimensional, it becomes difficult to visualize.
Therefore, the purpose of this study is to visualize
the landscape of the value function and the structure
of the state space when the state space is high dimen-
sional. Additionally, we show that this visualization is
useful for understanding the control rules of the agent
in reinforcement learning.
2 BACKGROUND
Reinforcement learning involves learning motion se-
lection for a certain state to maximize the reward (Sut-
ton and Barto, 1998). Many algorithms for reinforce-
ment learning are based on estimating value func-
tions. These function are classified into two types:
state value functions and action value functions. A
state value function is represented by V (s) and eval-
uates how much value an agent has in a given state.
An action value function is represented by Q(s, a) and
evaluates how much value is gained by performing a
given action in a given state for an agent.
2.1 Q-learning
Q-learning (Watkins and Dayan, 1992) is a value-
updating algorithm in reinforcement learning that up-
dates the action value function Q(s
t
, a
t
) using Equa-
tion (1).
Q(s
t
, a
t
) ← (1 −α)Q(s
t
, a
t
) + α
h
r
t+1
+ γ max
a
Q(s
t+1
, a)
i
(1)
Here, α is a parameter called the step-size, where 0 ≤
α ≤ 1. This parameter controls the rate at which the
action value function Q(s
t
, a
t
) is updated.
The ε-greedy method is often used as a behavioral
selection method in Q-learning, where 0 ≤ ε ≤ 1. This
is a method of taking random action with a probability
of ε and taking the action probability function with the
largest action with the probability of 1 − ε. In other
words, the larger the value of ε, the higher the explo-
ration rate, and the smaller the value of ε, the higher
the exploitation rate.
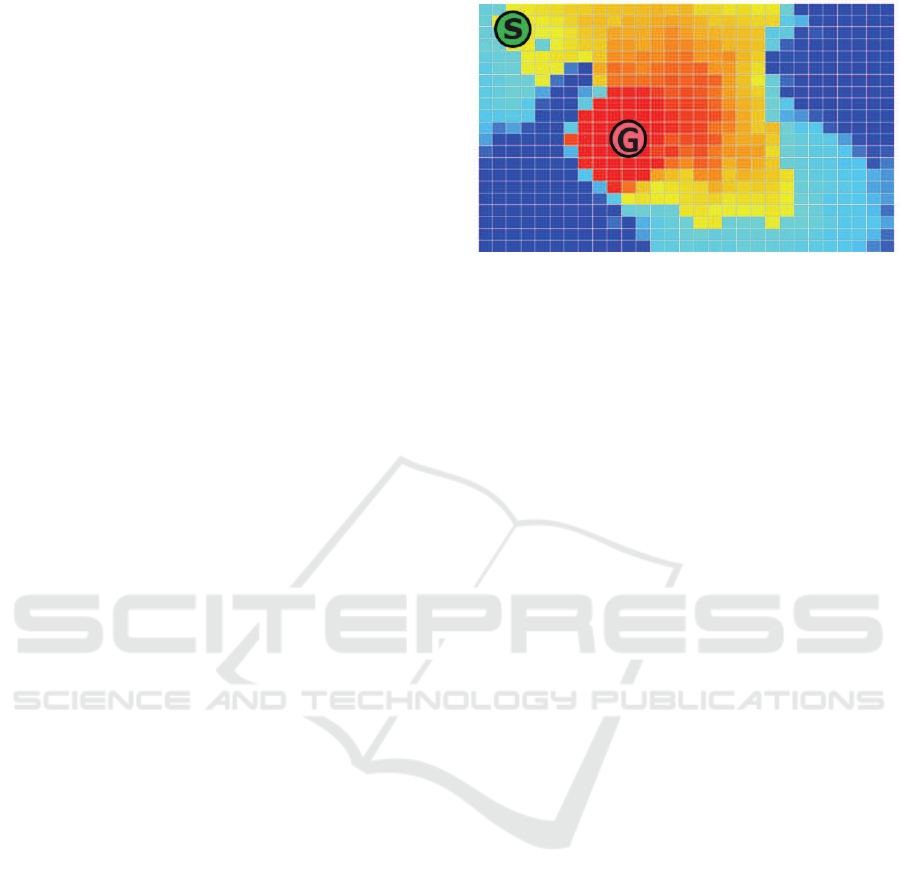
Figure 1: A heat map of learning how to climb a virtual
volcano from S (the start) to G (the goal) at the summit.
2.2 Heat Map
A heat map can be used as a method to visualize the
landscape of the value function and the structure of
the state space; an example of heat map is shown in
Figure 1. Here, a two-dimensional state space is de-
fined in the domain and the state value function is rep-
resented by the color shading. The heat map in Fig-
ure 1 represents a learning of how to climb a virtual
volcano from S (the start) to G (the goal) at the sum-
mit. In general, an agent has a policy to perform a
state transition to a state higher than the state value
of the existing state. In other words, when visual-
ized with this heat map, the transition to a warmer
color state is taken to be the policy and the probabil-
ity of repeating the state transition to a warmer color
state where a transition is possible is high. By analyz-
ing the heat map, the designer can roughly understand
how the agent repeats the state transition. Therefore,
the heat map visualizes the structure of the state space
and the landscape of the value function and is useful
for understanding the agent control rule.
However, it is rare for a heat map to be able to
visualize the structure the of state space and the land-
scape of the value function. This is because a heat
map has only two dimensions in the state space and it
is difficult to use it in the case of three or more dimen-
sions. Moreover, in the example of the virtual volcano
in Figure 1, it is assumed that the state transition can
be performed in the adjacent state; however, in actual-
ity, the state transition cannot be performed in the ad-
jacent state nor can the state transition be performed
in the non-adjacent state. If a system that can visual-
ize the structure of the state space and the landscape
of the value function exists, even if such a state space
has high dimensions or the structure of the state space
is complex, it would be useful. This is the purpose of
this study.
Topological Visualization Method for Understanding the Landscape of Value Functions and Structure of the State Space in Reinforcement
Learning
371

Figure 2: The TDA Mapper (from Singh et al. (Singh et al.,
2007) Figure 1).
2.3 TDA Mapper
In recent years, the TDA Mapper has attracted atten-
tion as a method for analyzing high dimensional and
large-scale data and as a big data analysis technol-
ogy that makes it easier for users to understand data
(Singh et al., 2007; Hamada and Chiba, 2017; Wang
et al., 2015). This is a method to topologically ana-
lyze data and create a graph with a topological struc-
ture similar to the original data. TDA Mapper mainly
analyzes point clouds, and uses the distance matrix of
point clouds as input data. The topological analysis
of high dimensional data is the focus of this study.
Figure 2 shows how to create a graph using TDA
Mapper. This is an example of creating a graph with
circularly distributed data while maintaining the topo-
logical structure. The graph creation algorithm in par-
ticular is shown. We analyze a point cloud
X =
x
1
, . . . , x
n
.
The point cloud X is distributed in a circle.
1. By defining the filter function,
h : X → R,
on the point cloud X, a filter value h(x) is given to
each point x. The circle is given a filter value that
increases from left to right.
2. The range h(X ) of the filter function is covered
with m intervals, I
1
, . . . , I
m
, and the point group X
is divided into level sets:
X
i
=
x ∈ X | h(x) ∈ I
i
.
Here, the lengths of the divided intervals are all
equal and the adjacent intervals I
i
and I
i+1
both
overlap by p% of the interval length. The example
in the Figure 2 is divided into five intervals with
20% overlap.
3. Each level set X
i
is clustered using an arbitrary
method and divided into clusters:
X
i
=
M
j
X
j
i
,
where
L
stands for direct sum and is synonymous
with
X
i
=
[
j
X
j
i
, X
j
i
\
X
j
0
i
= φ ( j 6= j
0
).
The adjacency relationships of the clusters X
j
i
are
expressed as a graph. Specifically, with a cluster
as a vertex, a graph
G
h
(X) =
(
V =
X
j
i
E =
(X
j
i
, X
k
i+1
) | X
j
i
T
X
k
i+1
6= φ
is constructed in which the edges are extended be-
tween the overlapping clusters belonging to adja-
cent levels. In Figure 2, the vertices of the graph
are ordered according to the level.
TDA Mapper requires the user to set many pa-
rameters at the time of graph creation; These param-
eters are the number of divisions of the filter function
range, the overlap ratio, and the clustering method.
From this, depending on the settings of the parame-
ters, the shape of the graph can differ greatly and it
is difficult to determine whether the output graph is
useful. The proposed method aims to improve this
problem as well.
3 THE PROPOSED METHOD: RL
MAPPER
We propose a method to visualize the structure of the
state space and the landscape of the value function
even when the state space is high dimensional and
complex. The proposed method is named RL Mapper,
where RL is an abbreviation for reinforcement lean-
ing. In this method, we modified the 2.3 TDA Mapper
algorithm to be appropriate for reinforcement learn-
ing. TDA Mapper analyzes point clouds and uses data
on the distance between points. On the other hand, RL
Mapper analyzes the landscape of the value function
and the structure of the state space. We make it possi-
ble to represent the landscape of the value function by
using state value data. Additionally, we make it possi-
ble to define the distance between states by using the
history of agent state transitions.
Here, we describe the specific algorithm. We visu-
alize the landscape of the value function and the struc-
ture of the state space of the state set,
S =
s
1
, . . . , s
n
,
which is completely learned or under learning.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
372
1. We define the filter function as the state value
function
v : S → R.
We give a filter value v(s) for each state s ∈ S.
2. We define m uncovering intervals I
1
, . . . , I
m
in the
range v(s) of the filter function. We divide the
state set S into level sets:
S
i
=
s ∈ S | v(s) ∈ I
i
.
Here, the sizes of the sections I
1
, . . . , I
m
are equal.
3. We cluster each level set S
i
and divide it into clus-
ters:
S
i
=
M
j
S
j
i
.
Here, we describe the clustering method used in
this approach. We define a set of states having a
history of state transitions between the states s ∈
S
i
of the level set S
i
as one cluster. We construct a
graph
G
v
(S) =
V =
S
j
i
E =
(S
j
i
, S
l
k
) | S
j
i
and S
l
k
have one
or more pairs of state pairs S
j
i
and S
l
k
that can transition between states
with nodes as clusters and edges defined below.
We call this graph, G
v
(S), the topological state
graph. We show an example of a topological state
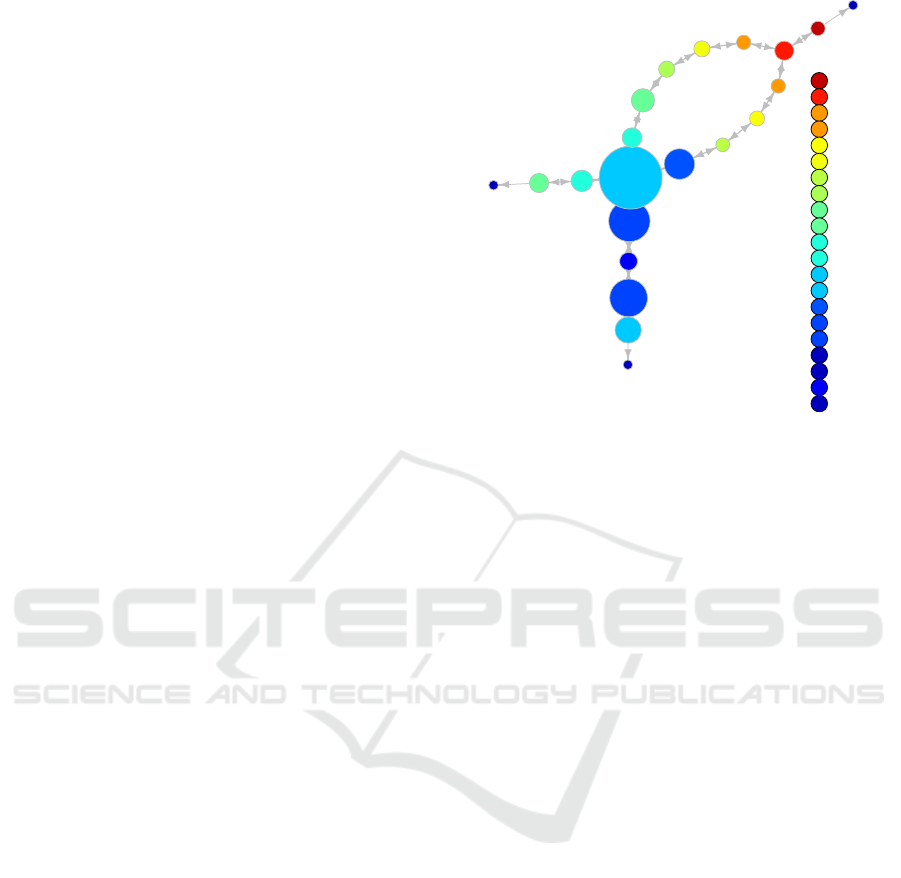
graph in Figure 3.
The features of the topological state graph are as
follows.
• A node is a set of “state value close” and “state
transitionable” states.
• The color density of a node is the average of the
state value of the state clustered on that node.
– A warm color indicates a high state value.
– A cool color indicates a low state value.
• We give the node a number x-y.
– x is a number indicating the interval of the state
value, where the state value is larger if the num-
ber is larger.
– y is the cluster label within the x interval.
• The size of a node is correlated to the number of
states included in that node.
• Between nodes connected by an edge, there are
one or more state pairs capable of a state transi-
tion.
1·1
1·2
1·3
1·4
2·1
2·2
2·3
3·1
3·2
4·1
4·2
5·1
5·2
6·1
6·2
7·1
7·2
8·1
8·2
9·1
10·1
node num qvalue
10·1 9 96.1
9·1 17 85.59
8·2 9 75.91
8·1 9 75.91
7·2 10 66.37
7·1 12 65.83
6·2 8 57.33
6·1 12 55.92
5·2 17 45.84
5·1 24 45.64
4·2 21 35.41
4·1 18 35.74
3·2 90 25.39
3·1 29 25.77
2·3 36 16.86
2·2 54 15.27
2·1 48 15.42
1·4 1 1
1·3 1 1
1·2 15 10.37
1·1 1 1
Figure 3: Topological stage graph.
The inputs to RL Mapper are state values of each state
and adjacency matrix representing the history of state
transitions based on agent experience. The only pa-
rameter set by the user is the number of divisions of
the filter value for the state value function. In rein-
forcement learning, it is difficult to define the dis-
tance between states; therefore, we performed clus-
tering using the history of the state transitions. This
makes it possible to store the structure of the state
space with higher accuracy. Moreover, because the
number of parameters is small, it is easy for the de-
signer to understand how the graph visually changes
owing to adjustments to the parameters.
4 EXPERIMENTS
The topological state graph, which visualizes the
landscape of the value function and the structure of
the state space with RL Mapper, is shown via experi-
ments to be useful for understanding the agent con-
trol rules. We experimented in two situations. In
Experiment 1, the state space is a two-dimensional
path search problem, and in Experiment 2 the state
space is a four-dimensional taxi task. In Experiment
1, by comparing the heat map with the topological
state graph, we show that the topological state graph
reproduces the utility of the heat map. We divided Ex-
periment 1 into 1-A and 1-B in which only the value
of reward was changed. In this way, we show that
by visualizing the landscape of the value function and
the structure of the state space, it is possible for the
designer to understand the difference in the control
Topological Visualization Method for Understanding the Landscape of Value Functions and Structure of the State Space in Reinforcement
Learning
373

rules of the agent caused by the change of the reward
function. In Experiment 2, we show that RL Map-
per is useful in the case of the high dimensional state
space as well as in the low dimensional one.
4.1 Two-dimensional Path Search
Problem
4.1.1 Outline of the Experiment
We divided the two-dimensional path search prob-
lem into Experiment 1-A and 1-B. Figure 4 shows
the environment of the route search problem used in
Experiment 1-A, and Figure 5 shows the same for
Experiment 1-B. In both experiments, 1-A and 1-B,
the agent is on a two-dimensional plane that satis-
fies x, y ∈ Z, 0 ≤ x, y ≤ 21. The state space is two-
dimensional consisting of the x coordinates and y co-
ordinates. The agent can recognize only the current
coordinates and the obtained reward and cannot rec-
ognize other environmental information.
The agent, as an action can move one square in
the vertical or horizontal direction. The agent cannot
move while in the state partitioned by the wall (the
thick line) and remains in the original state when se-
lecting an action to move toward the wall. Experiment
1-A starts at S, and when the agent reaches a point in-
dicated as 30, 50, 1000, or -500, we reward the agent
with 30, 50, 1000, or -500, respectively. Addition-
ally, when the agent reaches a point indicated as 30,
50, or 1000, the episode ends and the next episode
starts from the point of S. Similarly, if Experiment
1-B starts at S, and the agent reaches the points in-
dicated as 30, 50, 100, or -40, we reward the agent
with 30, 50, 100, or -40, respectively. When the agent
reaches a point indicated as 30, 50, or 100, the episode
ends and the next episode starts from the point S.
We use Q-learning and the set step-size α = 0.5,
explore ratio ε = 0.999
n
, where n is the number of
episodes and the discount rate γ = 0.95. The number
of divisions in the range of the filter function, which
is a parameter of the RL Mapper, is 10.
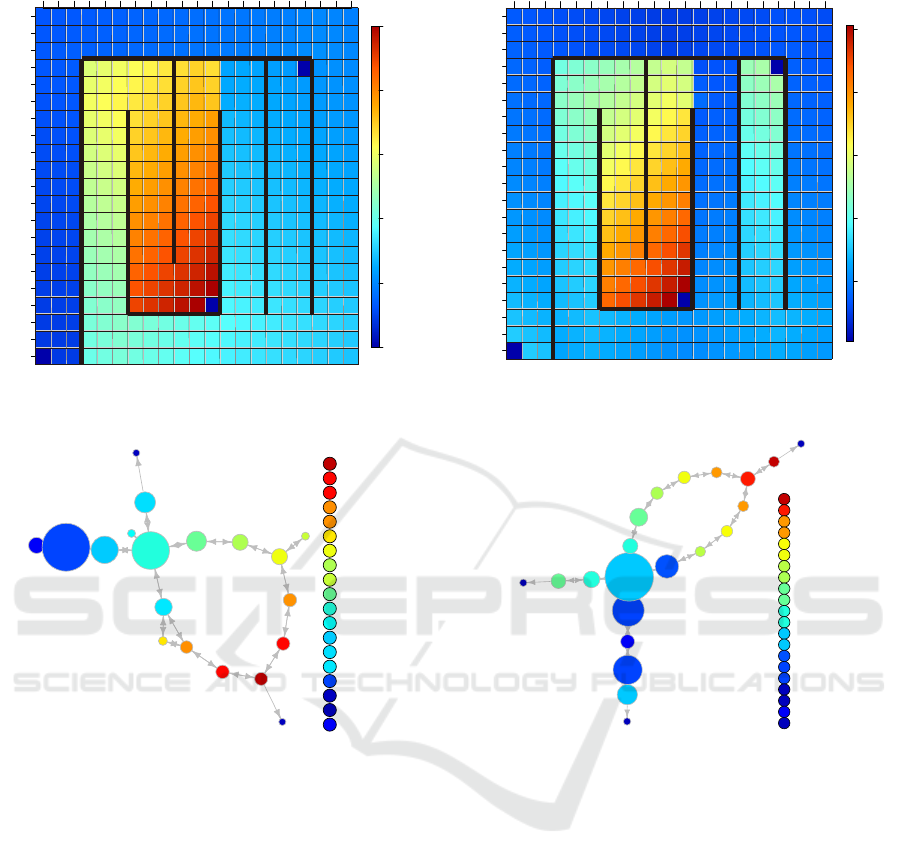
4.1.2 Results and Discussion
We show the heat map and state phase graph of 10,000
episodes in Experiment 1-A in Figures 6 and 7, re-
spectively. The labels of the nodes correspond to the
labels of the heat map.
The graphs of the 10,000 episodes shown in Fig-
ures 6 and 7 are for after the learning has been com-
pleted. The agent has a policy of repeating state tran-
sitions to higher states of the state value function.
Therefore, we can see from the heat map in Figure
Figure 4: Environment of Experiment 1-A.
Figure 5: Environment of Experiment 1-B.
6 that the agent has a state transition from 2-1 to 3-
3 to 4-1 to 5-1 to 6-2 to 7-1 to 8-1 to 9-1 to 10-1 to
1-2 as the control rule. As an exception, in 1-2, the
state value remains low because the agent receives a
reward and the episode ends. That is, the agent aims
to reach the state where it can earn a reward of 1000.
Here, there is one other way to reach the state where
the agent can earn a reward of 1000. It is a path where
the agent transitions from 2-1 to 3-3 to 4-1 to 3-1 to
7-2 or 8-2 to 9-2 to 10-1 to 1-2. However, the agent
does not have this route as the control rule because the
state value decreases at the state transition from 4-1 to
3-1. Similarly, we can see from the topological state
graph in Figure 7 that the agent has a state transition
from 2-1 to 3-3 to 4-1 to 5-1 to 6-2 to 7-1 to 8-1 to
9-1 to 10-1 to 1-2 as the control rule. The topological
state graph also shows another way to reach the state
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
374
0
200
400
600
800
1000
1 2 3 4567 8 9 10 11 12 13 14 15 16 17 18 19 20 21
21
20
19
18
17
16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
1·1
1·1
1·1
1·1
1·1
1·1
1·1
1·1
1·1
1·1
1·1
1·1
1·1
1·1
1·1
1·1
1·1
1·1
1·1
1·1
1·1
1·2
1·3
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1 2·1
2·1
2·
1
2·1
2·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·3
3·4
3·4
3·4
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·
1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
6·1
6·1
6·1
6·2
6·2
6·2
6·2
6·2
6·2
6·2
6·2
6·2
6·2
6·2
6·2
6·2
6·2
6·2
6·2
6·2
6·2
6·2
6·2
6·2
7·1
7·1
7·1
7·1
7·1
7·1
7·1
7·1
7·1
7·1
7·1
7·1
7·1
7·1
7·1
7·1
7·1
7·1
7·1
7·1
7·1
7·2
7·2
7·2 7·2
7·2
8·1
8·1
8·1
8·1
8·1
8·1
8·1
8·1
8·1
8·1
8·1
8·1
8·1
8·1
8·1
8·2
8·2
8
·2
8·2
8·2
8·2
8·2
8·2
8·2
8·2
8·2
8·2
8·2
9·1
9·1
9·1
9·1
9·1
9·1
9·1
9·1
9·1
9·1
9·1
9·1
9·1
9·1
9·1
9·2
9·2
9·2
9·2
9·2
9·2
9·2
9·2
9·2
9·2
9·2
9·2
9·2
9·2
9·2
10·1
10·1
10·1
10·1
10·1
10·1
10·1
10·1
10·1
10·1
10·1
10·1
10·1
10·1
Figure 6: Heat map for 10,000 episodes in Experi-
ment 1-A.
1·1
1·2
1·3
2·1
3·1
3·2
3·3
3·4
4·1
5·1
6·1
6·2
7·1
7·2
8·1
8·2
9·1
9·2
10·1
node num qvalue
10·1 14 953.6
9·2 15 855.2
9·1 15 855.2
8·2 13 751.3
8·1 15 749.7
7·2 5 685
7·1 21 643.5
6·2 21 546.9
6·1 3 585.9
5·1 30 444.3
4·1 69 337.4
3·4 3 295.4
3·3 46 248.4
3·2 32 263.1
3·1 24 270.3
2·1 92 147.3
1·3 1 1
1·2 1 1
1·1 21 87.22
Figure 7: Topological state graph for 10,000 episodes
in Experiment 1-A.
where the agent can earn a reward of 1000. we can
see that the agent does not have this route as the con-
trol rule because the state value decreases at the state
transition from 4-1 to 3-1.
Next, we show the heat map and state phase graph
of the 10,000 episodes in Experiment 1-B in Figures 8
and 9, respectively. The graphs of the 10,000 episodes
shown in Figure 8 and 9 are for after the learning has
been completed. We can see from the heat map in
Figure 8 that the agent has a state transition from 2-1
to 3-1 to 1-1 as the control rule. That is, the agent aims
to reach the state where it can earn a reward of 30. The
agent does not aim to reach a state where it can earn
rewards of 50 or 100. This is because this path has a
reduced state value at the state transition from 2-1 to
1-2. Similarly, we can see from the topological state
graph in Figure 9 that the agent has a state transition
from 2-1 to 3-1 to 1-1 as the control rule.
From Experiments 1-A and 1-B, we can see that
20
40
60
80
100
123456789 10 11 12 13 14 15 16 17 18 19 20 21
21
20
19
18
17
16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
1·1
1·2 1·2
1·2
1·2
1·2
1·2
1·2
1·2
1·2
1·2
1·2
1·2
1·2
1·2
1·2
1·3
1·4
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1
2·1 2·1 2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·2
2·3
2·3
2·3
2·3
2·3
2·3
2·3
2·3
2·3
2·3
2
·3
2·3
2·3
2·3
2·3
2·3
2·3
2·3
2·3
2·3
2·3
2·3
2·3
2·3
2·3
2·3
2·3
2·3
2·3
2·3
2·3
2·3
2·3
2·3
2·3
2·3
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·1
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·
2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
3·2
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·1
4·2
4·2
4·2
4·2
4·2
4·2
4·2
4·2
4·2
4·2
4·2
4·2
4·2
4·2
4·2
4·2
4·2
4·2
4·2
4·2
4·2
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
5·1
2·51·5
5·2
5·2
5·2
5·2
5·2
5·2
5·2
5·2
5·2
5·2
5·2
5·2
5·2
5·2
5·2
5·2
6·1
6·1
6·1
6·1
6·1
6·1
6·1
6·1
6·1
6·1
6·1
6·1
6·2
6·2
6·2
6·2
6·2
6·2
6·2
6·2
7·1
7·1
7·1
7·1
7·1
7·1
7·1
7·1
7·1
7·1
7·1
7·1
7·2
7·2
7·2
7·2
7·2
7·2
7·2
7·2
7·2
7·2
8·1
8·1
8·1
8·1
8·1
8·1
8·1
8·1
8·1
8·2
8·2
8·2
8·2
8·2
8·2
8·2
8·2
8·2
9·1
9·1
9·1
9·1
9·1
9·1
9·1
9·1
9·1
9·1
9·1
9·1
9·1
9·1
9·1
9·1
9·1
10·1
10·1
10·1
10·1
10·1
10·1
10·1
10·1
10·1
Figure 8: Heat map for 10,000 episodes in Experi-
ment 1-B.
1·1
1·2
1·3
1·4
2·1
2·2
2·3
3·1
3·2
4·1
4·2
5·1
5·2
6·1
6·2
7·1
7·2
8·1
8·2
9·1
10·1
node num qvalue
10·1 9 96.1
9·1 17 85.59
8·2 9 75.91
8·1 9 75.91
7·2 10 66.37
7·1 12 65.83
6·2 8 57.33
6·1 12 55.92
5·2 17 45.84
5·1 24 45.64
4·2 21 35.41
4·1 18 35.74
3·2 90 25.39
3·1 29 25.77
2·3 36 16.86
2·2 54 15.27
2·1 48 15.42
1·4 1 1
1·3 1 1
1·2 15 10.37
1·1 1 1
Figure 9: Topological state graph for 10,000 episodes
in Experiment 1-B.
the topological state graph output by RL Mapper pre-
serves the landscape of the value function and the
structure of the state space. Additionally, we find
that the agent control rules are different when com-
paring Experiments 1-A and 1-B. The difference in
the control rules results from the difference in the de-
sign of the reward function. The designer can visually
understand the differences in control rules using the
topological state graph. Therefore, topological state
graphs are useful for understanding the control rules
of agents.
Topological Visualization Method for Understanding the Landscape of Value Functions and Structure of the State Space in Reinforcement
Learning
375
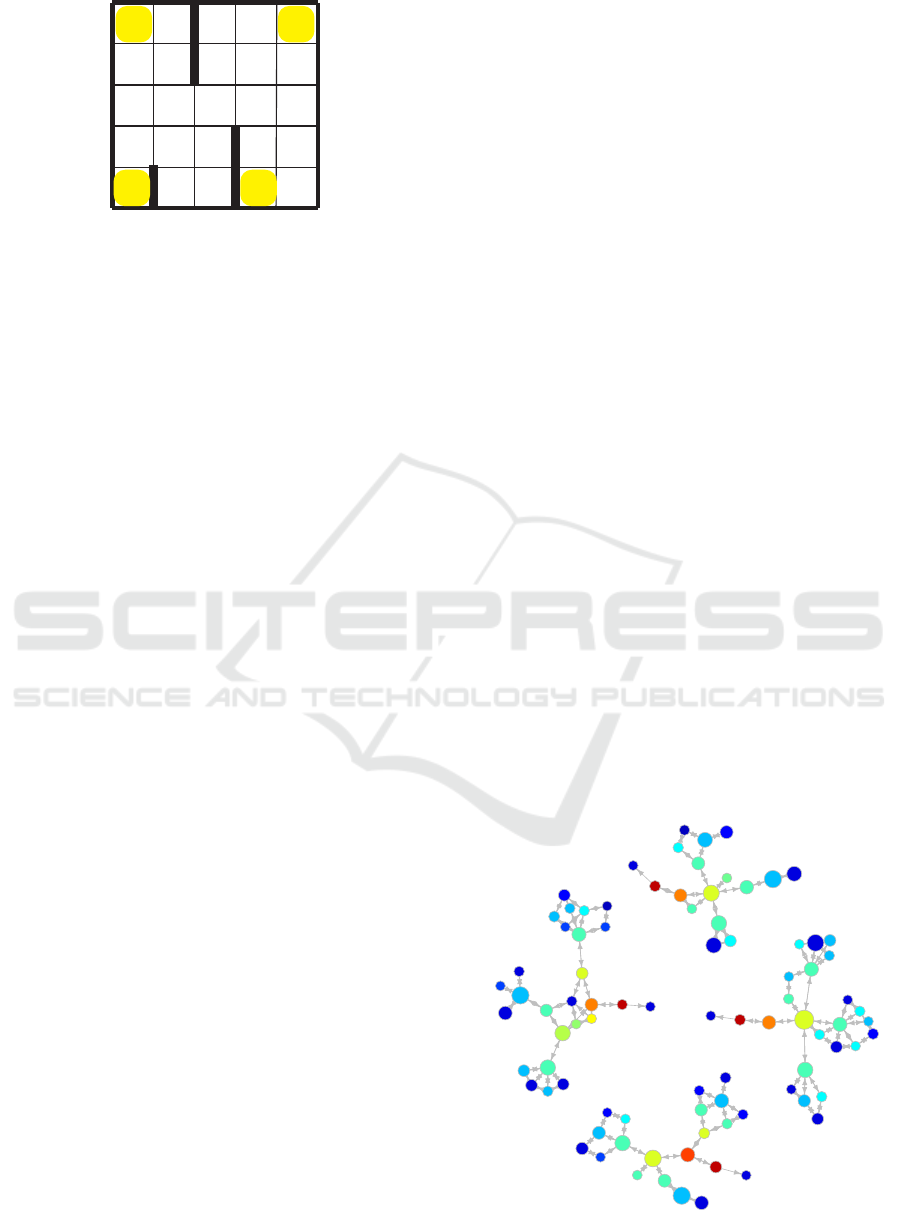
Figure 10: The taxi task.
4.2 Four-dimensional Taxi Task
4.2.1 Outline of the Experiment
The taxi task is to pick up a passenger in the environ-
ment shown in Figure 10 and carry them to the desti-
nation (S¸ ims¸ek et al., 2005). The agent here is a taxi.
A taxi, a passenger are located on a two-dimensional
plane that satisfies x, y ∈ Z, 0 ≤ x, y ≤ 5. The loca-
tions and destinations of the passengers are randomly
selected from the locations indicated by A, B, C, and
D. The initial position of the taxi is randomly selected
from the positions satisfying the above equation. At
each location, taxis have one choice of action: move
one square north, south, east, or west, pick up a pas-
senger, or drop off a passenger. The action of picking
up a passenger is only possible if the passenger is in
the same position as the taxi. Similarly, dropping off
a passenger is only possible if the passenger is in the
taxi and the taxi is at the destination. additionally,
agents cannot transition between pairs of states sep-
arated by walls (the thick line). If the agent chooses
to move toward a wall, it remains in its original state.
We reward the agent with 20 if the agent can deliver
the passenger to the destination. Additionally, when
we reward an agent, we end that episode and move to
the next episode. The state space is four-dimensional
consisting of the x coordinates, y coordinates, passen-
ger status, and destination location.
We use Q-learning and the set step-size α = 0.5,
the explore ratio ε = 0.3, and the discount rate γ =
0.9. The number of divisions in the range of the filter
function, which is a parameter of the RL Mapper, is
6.
4.2.2 Results and Discussion
We show the state phase graph for 5000 and 10,000
episodes in the Figure 11 and 12. RL Mapper can
also be used on the data during learning. The 5000
episodes are for the data during the learning, and the
10,000 episodes are for the data after the learning. We
compared the topological state graphs for the 5000
episodes in Figure 11 to the 10,000 episodes in Figure
12. We can see that the topological state graph for the
10,000 episodes has fewer nodes and edges and that
the graph is simpler than that for 5000 episodes. This
is because the learning process has smoothened the
landscape of the values. Additionally, we can see that
the graph is composed of four groups in the topolog-
ical state graphs for 5000 and 10,000 episodes. This
is because there are four destinations, which are sep-
arate tasks, and there is no state transition between
tasks.
Considering the topological state graph for 10,000
episodes in the Figure 12, we find that there are three
routes going to the high-value nodes 6-1, 6-2, 6-3,
and 6-4, and that these routes join to reach high-value
nodes. This is due to the three locations of the pas-
sengers not boarding at each destination. When a pas-
senger takes a taxi, they transition to high-value nodes
and reach nodes 1-1, 1-3, 1-6 and 1-8, where rewards
can be obtained.
Therefore, in the case of high dimensional state
space, RL Mapper can visualize the landscape of the
value function and the structure of the state space.
Moreover, we were able to understand the rough con-
trol rule of the agent using the topological state graph.
5 CONCLUSIONS
The purpose of this paper is to allow the designer to
understand the agent control rules by visualizing the
landscape of the value function and the structure of
the state space when the state space is high dimen-
1·1
1·2
1·
3
1·4
1·5
1·6
1·7
1·8
1·9
1·10
1·11
1·12
1·13
1·14
1·15
1·16
1·17
1·18
1·19
1·20
1·21
1·22
1·23
1·24
1·25
1·26
1·27
1·28
1·29
2·1
2·2
2·3
2·4
2·5
2·6
2·7
2·8
2·9
2·10
2·11
2·12
2·13
2·14
2·15
2·16
2·17
2·18
2·19
2·20
2·21
2·22
2·23
2·24
2·25
2·26
3·1
3·2
3·3
3·4
3·5
3·6
3·7
3·8
3·9
3·10
3·11
3·12
3·13
3·14
3·15
3·16
3·17
3·18
4·1
4·2
4·3
4·4
4·5
4·6
4·7
5·1
5·2
5·3
5·4
6·1
6·2
6·3
6·4
Figure 11: Topological state graph for 5000 episodes.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
376

1·1
1·2
1·3
1·4
1·5
1·6
1·7
1·8
2·1
2·2
2·3
2·4
2·5
2·6
2·7
2·8
2·9
2·10
2·11
2·12
3·1
3·2
3·3
3·4
3·5
3·6
3·7
3·8
3·9
3·10
3·11
3·12
4·1
4·2
4·3
4·4
4·5
4·6
5·1
5·2
5·3
5·4
6·1
6·2
6·3
6·4
node num qvalue
6·4 3 19.51
6·3 4 19.33
6·2 3 19.51
6·1 3 19.51
5·4 7 15.96
5·3 9 15.99
5·2 7 15.96
5·1 7 15.96
4·6 8 11.9
4·5 15 12.39
4·4 6 11.95
4·3 12 12.6
4·2 16 12.31
4·1 18 12.24
3·12 14 9.097
3·11 4 9.272
3·10 12 8.872
3·9 13 9.028
3·8 9 8.819
3·7 4 8.797
3·6 4 9.272
3·5 12 8.872
3·4 12 8.872
3·3 12 8.872
3·2 7 8.897
3·1 12 8.872
2·12 3 7.044
2·11 18 5.753
2·10 10 6.594
2·9 6 6.814
2·8 15 6.386
2·7 19 5.958
2·6 18 5.753
2·5 12 6.649
2·4 10 6.594
2·3 10 6.594
2·2 20 6.113
2·1 10 6.594
1·8 1 1
1·7 6 4.023
1·6 1 1
1·5 3 4.16
1·4 6 4.023
1·3 1 1
1·2 1 4.303
1·1 1 1
Figure 12: Topological state graph for 10,000 episodes.
sional. When the state space is low dimensional, a
method of visualizing the landscape of the value func-
tion and the structure of the state space already ex-
ists, the heat map; however, when the state space is
high dimensional, there is no method for such a vi-
sualization. Therefore, we proposed RL Mapper, a
visualization method that focuses on the topological
structure of the data. We examined the correspon-
dence between a heat map and a topological state
graph when the state space was two dimensional using
a path search problem and showed that the topologi-
cal state graph retains the usefulness of a heat map.
We also showed that the visualization of the value
function landscape and the state space structure in RL
Mapper is useful for understanding the agent control
rules. Additionally, using the taxi task, we showed
that RL Mapper can provide the same visualization
even when the state space is four dimensional. There-
fore, RL Mapper can visualize the landscape of the
value function and the structure of the state space in
the case of a high dimensional state space. We also
demonstrated that this visualization is useful for un-
derstanding the control rules of agents.
REFERENCES
S¸ ims¸ek, O., Wolfe, A. P., and Barto, A. G. (2005). Identify-
ing useful subgoals in reinforcement learning by local
graph partitioning. In Proceedings of the 22Nd In-
ternational Conference on Machine Learning, ICML
’05, pages 816–823, New York, NY, USA. ACM.
Hamada, N. and Chiba, K. (2017). Knee point analysis
of many-objective pareto fronts based on reeb graph.
In 2017 IEEE Congress on Evolutionary Computation
(CEC), pages 1603–1612.
Matari
´
c, M. J. (1997). Reinforcement learning in the multi-
robot domain. Auton. Robots, 4(1):73–83.
Singh, G., Memoli, F., and Carlsson, G. (2007). Topolog-
ical Methods for the Analysis of High Dimensional
Data Sets and 3D Object Recognition. In Botsch, M.,
Pajarola, R., Chen, B., and Zwicker, M., editors, Eu-
rographics Symposium on Point-Based Graphics. The
Eurographics Association.
Smart, W. D. and Pack Kaelbling, L. (2002). Effective rein-
forcement learning for mobile robots. In Proceedings
2002 IEEE International Conference on Robotics and
Automation (Cat. No.02CH37292), volume 4, pages
3404–3410 vol.4.
Sutton, R. S. and Barto, A. G. (1998). Introduction to Re-
inforcement Learning. MIT Press, Cambridge, MA,
USA, 1st edition.
Wang, L., Wang, G., and Alexander, C. A. (2015). Big data
and visualization: Methods, challenges and technol-
ogy progress. Digital Technologies, 1(1):33–38.
Watkins, C. J. C. H. and Dayan, P. (1992). Technical note:
q-learning. Mach. Learn., 8(3-4):279–292.
Topological Visualization Method for Understanding the Landscape of Value Functions and Structure of the State Space in Reinforcement
Learning
377
