
Data-driven Algorithm for Scheduling with Total Tardiness
Michal Bou
ˇ
ska
1,2 a
, Anton
´
ın Nov
´
ak
1,2 b
, P
ˇ
remysl
ˇ
S
˚
ucha
1 c
, Istv
´
an M
´
odos
1,2 d
and Zden
ˇ
ek Hanz
´
alek
1 e
1
Czech Institute of Informatics, Robotics and Cybernetics, Czech Technical University in Prague,
Jugosl
´
avsk
´
ych partyz
´
an
˚
u 1580/3, Prague, Czech Republic
2
Czech Technical University in Prague, Faculty of Electrical Engineering, Department of Control Engineering,
Karlovo n
´
am
ˇ
est
´
ı 13, Prague, Czech Republic
Keywords:
Single Machine Scheduling, Total Tardiness, Data-driven Method, Deep Neural Networks.
Abstract:
In this paper, we investigate the use of deep learning for solving a classical N P -hard single machine schedul-
ing problem where the criterion is to minimize the total tardiness. Instead of designing an end-to-end machine
learning model, we utilize well known decomposition of the problem and we enhance it with a data-driven
approach. We have designed a regressor containing a deep neural network that learns and predicts the criterion
of a given set of jobs. The network acts as a polynomial-time estimator of the criterion that is used in a single-
pass scheduling algorithm based on Lawler's decomposition theorem. Essentially, the regressor guides the
algorithm to select the best position for each job. The experimental results show that our data-driven approach
can efficiently generalize information from the training phase to significantly larger instances (up to 350 jobs)
where it achieves an optimality gap of about 0.5%, which is four times less than the gap of the state-of-the-art
NBR heuristic.
1 INTRODUCTION
The classical approaches for solving combinatorial
problems have several undesirable properties. First,
solving instances of an N P -Hard problem to op-
timality consumes an unfruitful amount of compu-
tational time. Second, there is no well-established
method how to utilize the solved instances for im-
proving the algorithm or recycling the solutions for
the unseen instances. Finally, the development of ef-
ficient heuristic rules requires a substantial time de-
voted to the research. To address these issues, we
investigate the use of deep learning which is able to
derive knowledge from the already solved instances
of a classical scheduling N P -hard Single Machine
Total Tardiness Problem (SMTTP) and estimate the
optimal value of an unseen SMTTP instance. This is
the first successful application of deep learning to the
scheduling problem; we successfully integrated the
deep neural network into a known decomposition al-
gorithm and outperformed the state-of-the-art heuris-
tics. With this, we are able to solve instances with
a
https://orcid.org/0000-0002-8034-2531
b
https://orcid.org/0000-0003-2203-4554
c
https://orcid.org/0000-0003-4895-157X
d
https://orcid.org/0000-0003-4692-1625
e
https://orcid.org/0000-0002-8135-1296
hundreds of jobs, which is significantly more than,
e.g., an end-to-end approach (Vinyals et al., 2015)
that solves Traveling Salesman Problem with about
50 nodes. Our proposed approach outperforms the
state-of-the-art heuristic for SMTTP.
1.1 Problem Statement
The combinatorial problem studied in this paper is de-
noted as 1||
∑
T
j
in Graham’s notation of scheduling
problems (Graham et al., 1979). Let J = {1,..., n} be
a set of jobs that has to be processed on a single ma-
chine. The machine can process at most one job at a
time, the execution of the jobs cannot be interrupted,
and all the jobs are available for processing at time
zero. Each job j ∈ J has processing time p
j
∈ Z
≥0
and due date d
j
∈ Z
≥0
. Let π : {1,.. .,n} 7→ {1, ... ,n}
be a bijective function representing a sequence of the
jobs, i.e., π(k) ∈ J is the job at position k in sequence
π. For a given sequence π, tardiness of job π(k) is de-
fined as T
π(k)
= max
0,
∑
k
k
0
=1
p
π(k
0
)
− d
π(k)
. The
goal of the scheduling problem is to find a sequence
which minimizes the total tardiness, i.e.,
∑
j∈J
T
j
. The
problem is proven to be N P -hard (Du and Leung,
1990).
In the rest of the paper, we use the following two
definitions to describe the ordering of the jobs:
Bouška, M., Novák, A., Š˚ucha, P., Módos, I. and Hanzálek, Z.
Data-driven Algorithm for Scheduling with Total Tardiness.
DOI: 10.5220/0008915300590068
In Proceedings of the 9th International Conference on Operations Research and Enterprise Systems (ICORES 2020), pages 59-68
ISBN: 978-989-758-396-4; ISSN: 2184-4372
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
59

1. earliest due date (edd): if 1 ≤ j < j
0
≤ n then ei-
ther (i) d
j
< d
j
0
or (ii) d
j
= d
j
0
∧ p
j
≤ p
j
0
,
2. shortest processing time (spt): if 1 ≤ j < j
0
≤ n
then either (i) p
j
< p
j
0
or (ii) p
j
= p
j
0
∧ d
j
≤ d
j
0
.
1.2 Contribution and Outline
This paper addresses a single machine total tardiness
scheduling problem using a machine learning tech-
nique. Unlike some existing works, for example,
(Vinyals et al., 2015), we do not purely count on ma-
chine learning, but we combine it with the known ap-
proaches from OR domain. The advantage of our ap-
proach is that it can extract specific knowledge from
data, i.e., already solved instances, and use it to solve
the new ones. The experimental results show two
important observations. First, our algorithm outper-
forms the state-of-the-art heuristic (Holsenback and
Russell, 1992), and it also provides better results
on some instances than the exact state-of-the-art ap-
proach (Garraffa et al., 2018) with a time limit. Sec-
ond, the proposed algorithm is capable of generaliz-
ing the acquired knowledge to solve instances that
were not used in the training phase and also signifi-
cantly differ from the training ones, e.g., in the num-
ber of jobs or the maximal processing time of jobs.
The rest of the paper is structured as follows.
In Section 2, we present a review of literature for
SMTTP and combination of operations research (OR)
and machine learning (ML). Section 3 describes our
approach integrating a regressor into the decomposi-
tion and analyzes it’s time complexity. We present
results for standard benchmark instances for SMTTP
in Section 4. Finally, the conclusion is drawn in Sec-
tion 5.
2 RELATED WORK
The first part of the literature overview is based on
the extensive survey addressing SMTTP published by
(Koulamas, 2010) which we further extend with the
description of the current state-of-the-art algorithms.
The second part maps existing work in machine learn-
ing related to solving combinatorial problems.
2.1 SMTTP
In 1977 it was shown by Lawler (Lawler, 1977) that
the weighted single machine total tardiness problem
is N P -Hard. However, it took more than a decade to
prove that the unweighted variant of this problem is
N P -Hard as well (Du and Leung, 1990).
Lawler (Lawler, 1977) proposes a pseudo-
polynomial (in the sum of processing times) algo-
rithm for solving SMTTP. The algorithm is based
on a decomposition of the problem into subproblems.
The decomposition selects the job with the maximum
processing time and tries all the positions following
its original position in the edd order. For each po-
sition, two subproblems are generated; the first sub-
problem contains all the jobs preceding the job with
the maximum processing time and the second sub-
problem contains all the jobs following the job with
the maximum processing time. In addition, Lawler
introduces rules for filtering the possible positions of
the job with the maximum processing time. This al-
gorithm can solve instances with up to one hundred
jobs. F. Della Croce et al. (Della Croce et al., 1998)
proposed a spt decomposition which selects the job
with the minimal due date and tries all the positions
preceding its original position in spt order. Similarly
as with the Lawler’s decomposition, two subproblems
are generated where the first subproblem contains all
the jobs preceding the job with the minimal due date
time and the second subproblem contains all the jobs
following the job with the minimal due date. F. Della
Croce et al. combined both edd decomposition and
spt decomposition together, this presented algorithm
is able to solve instances with up to 150 jobs. Finally,
Szwarc et al. (Szwarc et al., 1999) integrate the dou-
ble decomposition from (Della Croce et al., 1998) and
a split procedure from (Szwarc and Mukhopadhyay,
1996). This algorithm was the state-of-the-art method
for a long time with the ability to solve instance with
up to 500 jobs.
Recently, Garraffa et al. (Garraffa et al., 2018)
proposed Total Tardiness Branch-and-Reduce Algo-
rithm (TTBR), which infers information about nodes
of the search tree and merges nodes related to the
same subproblem. This is the fastest known exact al-
gorithm for SMTTP to this date and is able to solve
instances with up to 1300 jobs.
Exact algorithms, such as the ones mentioned
above, have very large computation times while the
optimal solution is rarely needed in practice. Hence,
heuristic algorithms are often more practical. Exist-
ing heuristics algorithm can be categorized into the
following three major groups.
The first group of heuristics creates a job order
and schedule the jobs according this order, i.e., list
scheduling algorithms. There are various methods
for creating a job order. The easiest one is to sort
job by Earliest Due Date rule (edd). A more effi-
cient algorithm called NBR was proposed in (Holsen-
back and Russell, 1992). NBR is a constructive lo-
cal search heuristic which starts with job set J sorted
ICORES 2020 - 9th International Conference on Operations Research and Enterprise Systems
60

by edd and constructs the schedule from the end by
exchanging two jobs. Panwalkar et al. (Panwalkar
et al., 1993) proposes constructive local search heuris-
tic PSK, which starts with job set J sorted by spt and
constructs the schedule from the start by exchang-
ing two jobs. Russel and Holsenback (Russell and
Holsenback, 1997) compares PSK and NBR heuris-
tic, and conducted that neither heuristic is inferior
to another one. However, NBR finds a better solu-
tions in more cases. The second group of heuris-
tics is based on Lawler decomposition rule (Lawler,
1977). In this case, heuristic evaluates each child of
the search tree node and the most promising child
is expanded. This heuristic approach is evaluated in
(Potts and Van Wassenhove, 1991) with edd heuris-
tic as a guide for the search. The third group of
heuristics are metaheuristics. (Potts and Van Wassen-
hove, 1991), (Antony and Koulamas, 1996), (Ben-
Daya and Al-Fawzan, 1996) present simulated an-
nealing algorithm for SMTTP. Genetic algorithms
applied to SMTTP are described in (Dimopoulos and
Zalzala, 1999), (S
¨
uer et al., 2012), whereas (Bauer
et al., 1999), (Cheng et al., 2009) propose to use ant
colony optimization for this scheduling problem. All
the reported results in the previous studies are for in-
stance sizes up to 100 jobs. However, these instances
are solvable by the current state-of-the-art exact algo-
rithm in a fraction of second.
2.2 Machine Learning Integration to
Combinatorial Optimization
Problems
The integration of ML to combinatorial optimization
problems has several difficulties. As first, ML models
are often designed with feature vectors having pre-
defined fixed size. On the other hand, instances of
scheduling problems are usually described by a vari-
able number of features, e.g., variable number of jobs.
This issue can be addressed by recurrent networks
and, more recently, by encoder-decoder type of ar-
chitectures. Vinyals (Vinyals et al., 2015) applied an
architecture called Pointer Network that, given a set
of graph nodes, outputs a solution as a permutation of
these nodes. The authors applied the Pointer Network
to Traveling Salesman Problem (TSP), however, this
approach for TSP is still not competitive with the best
classical solvers such as Concorde (Applegate et al.,
2006) that can find optimal solutions to instances with
hundreds nodes in a fraction of second. Moreover, the
output from the Pointer Network needs to be corrected
by the beam-search procedure, which points out the
weaknesses of this end-to-end approach. Pointer Net-
work has achieved optimality gap around 1% for in-
stance with 20 nodes after performing beam-search.
Second difficulty with training a ML model is
with acquisition of training data. Obtaining one train-
ing instance usually requires solving a problem of
the same complexity like the original problem it-
self. This issue can be addressed with reinforcement
learning paradigm. Deudon et al. (Deudon et al.,
2018) used encoder-decoder architecture trained with
REINFORCE algorithm to solve 2D Euclidean TSP
with up to 100 nodes. It is shown that (i) repeti-
tive sampling from the network is needed, (ii) ap-
plying well-known 2-opt heuristic on the results still
improves the solution of the network, and (iii) both
the quality and runtime are worse than classical ex-
act solvers. Similar approach is described in (Kool
and Welling, 2018) which, if it is treated as a greedy
heuristic, beats weak baseline solutions (from the op-
erations research perspective) such as Nearest Neigh-
bor or Christofides algorithm on small instances. To
be competitive in terms of quality with more rele-
vant baselines such as Lin-Kernighan heuristics, they
perform multiple sampling from the model and out-
put the best solution. Moreover, they do not directly
compare their approach with state-of-the-art classi-
cal algorithms while admitting that off-the-shelf Inte-
ger Programming solver Gurobi solves optimally their
largest instances within 1.5 s.
Khalil et al. (Khalil et al., 2017) present an inter-
esting approach for learning greedy algorithms over
graph structures. The authors show that their S2V-
DQN model can obtain competitive results on MAX-
CUT and Minimum Vertex Cover problems. For TSP,
S2V-DQN performs about the same as 2-opt heuris-
tics. Unfortunately, the authors do not compare run-
times with Concorde solver.
Milan et al. (Milan et al., 2017) presents a
data-driven approximation of solvers for N P -hard
problems. They utilized a Long Short-Term Mem-
ory (Hochreiter and Schmidhuber, 1997) (LSTM) net-
work with a modified supervised setting. The reported
results on the Quadratic Assignment Problem show
that the network’s solutions are worse than general
purpose solver Gurobi while having the essentially
identical runtime.
Integration of ML with scheduling problems has
received a little attention so far. Earlier attempts of
integrating neural networks with job-shop scheduling
are (Zhou et al., 1991) and (Jain and Meeran, 1998).
However, their computational results are inferior to
the traditional algorithms, or they are not extensive
enough to assess their quality. An alternative use of
ML in scheduling domain is focused on the criterion
function of the optimization problems. For example,
authors in (V
´
aclav
´
ık et al., 2016) address a nurse ros-
Data-driven Algorithm for Scheduling with Total Tardiness
61

tering problem and improved the evaluation of the so-
lutions’ quality without calculating their exact crite-
rion values. They propose a classifier, implemented
as a neural network, able to determine whether a cer-
tain change in a solution leads to a better solution or
not. This classifier is then used in a local search al-
gorithm to filter out solutions having a low chance
to improve the criterion function. Nevertheless, this
approach is sensitive to changes in the problem size,
i.e., the size of the schedule of nurses. If the size is
changed, a new neural network must be trained. An-
other method, which does not directly predict a so-
lution to the given instance, is proposed in (V
´
aclav
´
ık
et al., 2018). In this case, an online ML technique is
integrated into an exact algorithm where it acts as a
heuristic. Specifically, the authors use regression for
predicting the upper bound of a pricing problem in a
Branch-and-Price algorithm. Correct prediction leads
to faster computation of the pricing problem while in-
correct prediction does not affect the optimality of the
algorithm. This method is not sensitive to the change
of the problem size; however, it is designed specif-
ically for the Branch-and-Price approach and cannot
be generalized to other approaches.
3 PROPOSED DECOMPOSITION
HEURISTIC ALGORITHM
In this section, we introduce Heuristic Optimizer
using Regression-based Decomposition Algorithm
(HORDA) for Single Machine Total Tardiness Problem
(SMTTP). This heuristic effectively combines the
well-know properties of SMTTP and the data-driven
approach. Moreover, this paper proposes a methodol-
ogy for designing data-driven heuristics for schedul-
ing problems where good estimator of the optimiza-
tion criterion can be obtained to guide the search.
This section is structured as follows. First of all,
we summarize decompositions used in the algorithm.
As the second, we describe HORDA. Next we con-
tinue by discussing the architecture of the regressor,
its integration into SMTTP decompositions, and de-
scribe the training of the neural network. Finally, we
analyze the time complexity of HORDA algorithm.
3.1 SMTTP Decompositions
Firstly, we describe two different decomposition ap-
proaches for SMTTP. The reason is that every state-
of-the-art exact algorithm for SMTTP is based on
these two decompositions.
First decomposition, introduced by Lawler
(Lawler, 1977), uses edd (earliest due date) order
in which it selects position for job j
p-max
, i.e., a
job with the maximal processing time from job set
J (in case of tie, j
p-max
is the job with the larger
index in edd order). Lawler proves that there
exists position k ∈ { j
p-max
,.. .,n} in the edd order
such that at least one optimal solution exists where
j
p-max
is preceded by all jobs {1,. .., k} \ { j
p-max
}
and followed by all jobs {k + 1,.. .,n}. Let us
denote set of positions { j
p-max
,.. .,n} as K
edd
. This
property leads to the following exact decomposition
algorithm. First, let P
edd
: P (J) × [1,.. .,n] → P (J)
and F
edd
: P (J) × [1, ... , n] → P (J) be functions
which for job set J and position k return subproblem
with jobs {1,... ,k} \ { j
p-max
} and {k + 1,. ..,n},
respectively. Where P (J) is powerset of J. Thus, for
each eligible position k ∈ { j
p-max
,.. .,n}, the problem
is decomposed into two subproblems defined by
P
edd
(J, k) and F
edd
(J, k) such that jobs j
p-max
is
neither in P
edd
nor in F
edd
. Let Z (J) denote the
optimal criterion value for job set J computed as
Z (J) = min
k∈K
edd
Z (J,k) , (1)
where
Z (J,k) = Z
P
edd
(J, k)
+
max
0, p
k
− d
k
+
∑
j∈P
edd
(J,k)
p
j
+
Z
F
edd
(J, k)
.
(2)
The optimal solution to the instance is found by recur-
sively selecting the position k with the minimal crite-
rion Z.
The second decomposition(Della Croce et al.,
1998) introduced by Della Croce et al. uses spt or-
der in which it selects position for job j
d-min
. We re-
fer to this decomposition as spt decomposition. Let
us define j
d-min
job as a job with the minimal due
date from job set J (in case of tie, j
d-min
is the job
with the smaller index in the spt order). Similarly
as in the edd decomposition proposed by Lawler,
Della Croce et al. (Della Croce et al., 1998) prove
that for job j
d-min
in spt order there exists position
k ∈ {1,.. ., j
d-min
} such that in at least one optimal so-
lution j
d-min
is preceded by job set generated by func-
tion P
spt
: P (J) × [1,.. .,n] → P (J). P
spt
(J, k) returns
job set with first k jobs selected from {1,. .., j
d-min
}
which are then sorted by edd. Job j
d-min
is followed
by job set F
spt
: P (J) × [1, . .., n] → P (J) with all the
others jobs. The set of positions k ∈ {1, ... , j
d-min
} is
denoted as K
spt
. One may use the spt decomposition
in the same recursive way as edd decomposition to
find the optimal solution.
ICORES 2020 - 9th International Conference on Operations Research and Enterprise Systems
62

The efficiency of both decomposition approaches
is significantly influenced by the branching factor.
Here, the branching factor is equal to the number of
eligible positions where job j
p-max
∈ K
edd
( j
d-min
∈
K
spt
) can be placed. The number of eligible posi-
tions can be reduced by filtering rules described in
(Lawler, 1977) and (Szwarc et al., 1999). Let us de-
note that
K
edd
, K
spt
are the sets K
edd
, K
spt
filtered by
rules from (Szwarc et al., 1999) respectively.
3.2 HORDA
Even though algorithms using decompositions pro-
posed in (Lawler, 1977) and (Della Croce et al., 1998)
are very efficient, their time complexity exponentially
grows with the number of jobs. Our HORDA algo-
rithm avoids this exponential growth by pruning the
search tree ruled by the polynomial-time estimation
of (2) produced by a neural network. The estimations
of Z (J,k) and Z (J) are denoted as
b
Z (J,k) and
b
Z (J),
respectively.
HORDA algorithm is outlined in Algorithm 1. To
increase the efficiency of the solution space search,
our HORDA algorithm combines the power of both de-
compositions (Lawler, 1977) and (Della Croce et al.,
1998) in the following way. The HORDA algorithm
generates (lines 5 and 6) two sets of eligible positions
K
edd
and K
spt
by either edd or spt decomposition
which are filtered by state-of-the-art rules (Szwarc
and Mukhopadhyay, 1996). Then, the set with the
minimal cardinality is selected (lines 7 - 12) for the
recursive expansion; we refer to the selected set as K.
After obtaining positions set K, the algorithm
greedily selects k
∗
position having the minimal esti-
mation
b
Z (line 13). Next, the algorithm recursively
explores job sets P(J,k
∗
) and F (J, k
∗
), and result-
ing partial sequences are stored as vectors before and
after respectively (lines 14 and 15). Finally, the al-
gorithm merges {before, k
∗
,after} into one sequence,
which is returned as the resulting schedule (line 17).
Note that job sets with less or equal than 5 jobs are
solved to optimality by an exact solver (Total Tardi-
ness Branch-and-Reduce Algorithm (TTBR)) instead
of the decomposition.
3.3 Regressor
The proposed HORDA algorithm utilizes the regressor
estimation in the decomposition to guide the search
by selecting position k
∗
that minimizes the estimated
criterion
b
Z (see line 13). The quality of the estima-
tion significantly affects the quality of the found solu-
tions. However, HORDA algorithm is not sensitive to
absolute error of the estimation, instead, it’s relative
Algorithm 1: Decomposition heuristic search
(HORDA).
Data: J
Result: HORDA ordered jobs
1 Function H O R D A (J):
2 if |J| ≤ 1 then
3 return toSequence(J)
4 end
/* Generate edd and spt positions
with respect to the filtering
rules */
5 K
edd
← genEDDPos(J)
6 K
spt
← genSPTPos(J)
7 if |K
edd
| ≤ |K
spt
| then
8 K ← K
edd
, P ← P
edd
, F ← F
edd
9 end
10 else
11 K ← K
spt
, P ← P
spt
, F ← F
spt
12 end
/* Where
b
Z is computed by
regressor. */
13 k
∗
← argmin
k∈K
(
b
Z (P(J,k)) + max(0, p
k
−
d
k
+
∑
j∈P(J,k)
p
j
) +
b
Z (F (J,k)))
14 before ← H O R D A (P(J, k
∗
))
15 after ← H O R D A (F (J,k
∗
))
/* join sequences into one */
16 order ← (before, k
∗
, after)
17 return order
error is important. Therefore, the proposed regres-
sor is based on neural networks that are known to be
successful for problems sensitive to relative error, for
example Google (Silver et al., 2016) applied them to
predict a policy in Monte Carlo Tree Search to solve
game of Go.
The architecture of our regressor using neural net-
work is illustrated in Figure 1. It has two main parts.
The first one is the normalization of the input data, de-
scribed in Section 3.3.1. The second one is the neural
network, explained in Section 3.3.2.
3.3.1 Input Data Preprocessing
The speed of training and quality of the neural net-
work is affected by the preprocessing of the input in-
stances. There are two main reasons for the prepro-
cessing denoted as Norm in Figure 1. Firstly, prepro-
cessing of the input instance normalizes the instances,
and thus reduces the variability of input data denoted
X
X
X. For example, two neural network inputs differing
only in job order are, in fact, the same. Secondly, nu-
merical stability of the computation is improved by
Data-driven Algorithm for Scheduling with Total Tardiness
63

neural network
J
Norm
LSTM (512)
dense (1)
Norm
−1
b
Z(J) ∈ R
≥0
X
X
X
y
Figure 1: Regressor architecture.
the preprocessing. In our regression architecture, the
preprocessing has three main parts:
1. sorting of the input: we performed preliminary
experiments with various sorting options such as
edd, spt, reversed edd and reversed spt, among
which edd performed the best.
2. normalization of the input: the processing times
and due dates are divided by the sum of the pro-
cessing times in the instance.
3. appending additional features to the neural net-
work: each job has one additional feature which
is its position in X
X
X divided by the number of the
jobs.
The best practice in the neural network training
is to normalize value that is estimated by the neu-
ral network, denoted as y in Figure 1. In the train-
ing phase, the associated optimal criterion value of
each instance is divided by the sum of the process-
ing times. Alternatively, we evaluated one additional
criterion normalization Z/
n ·
∑
j∈J
p
j
. However, it
performed poorly. In the HORDA the estimation pro-
duced by the neural network has to be denormalized
by the inverse transformation (Norm
−1
in Figure 1) to
obtain the actual estimation of the total tardiness.
3.3.2 Neural Network
The input data for our neural network have several
similarities as the input data for nature language pro-
cessing (NLP) problems. Firstly, as well as NLP, our
data can be arbitraly large, i.e., the size of job set J is
unbounded; similarly, sentences in NLP can be arbi-
trarily long. In other research fields, such as computer
vision, this issue is mitigated by scaling the feature
vectors to a fixed length. However, there is no sim-
ple and general way for scheduling problems how to
aggregate multiple jobs into one without losing nec-
essary information. Therefore, we use another tech-
nique of dealing with the varying length of the input
which are recurrent neural network (RNN) (Sunder-
meyer et al., 2012).
Our neural network for the criterion estimation
of J consists of two parts (the red box in Figure 1).
The first layer is Long Short-Term Memory (Hochre-
iter and Schmidhuber, 1997) (LSTM), which receives
job set J as the input. The input X
X
X is a sequence of
features x
x
x
j
for every job j ∈ J. Each feature vector
x
x
x
j
consists of p
j
and d
j
with additional features de-
scribed below. The output of the last LSTM step is
passed into a dense layer which produces estimation
y of the criterion for X
X
X.
3.4 Time Complexity of HORDA
In this section, we present the worst-case runtime of
HORDA. The most time consuming part of HORDA is
the estimation of
b
Z (J) by the regressor. The LSTM
layer produces
b
Z (J) in O(n) time and HORDA algo-
rithm evaluates the regressor 2 · n times to select posi-
tion k
∗
from K. Thus, the evaluation of all the estima-
tions for K takes O(n
2
). In the worst-case, when de-
composition repetitively removes one job, HORDA al-
gorithm makes O(n) selections of position k
∗
. There-
fore, the worst-case time complexity of HORDA al-
gorithm is O(n
3
). However, we note that the con-
stants present in the asymptotic complexit are fairly
low. Hence, it is efficient in practice, as well.
4 EXPERIMENTAL RESULTS
In this section, we present the experimental results.
Firstly, we describe the training of the neural network,
also with the acquisition of a training dataset. Sec-
ondly, we describe the generation of the benchmark
instances. Then we compare our HORDA heuristic
with the state-of-the-art heuristic NBR (Holsenback
Table 1: Mean TTBR(Garraffa et al., 2018) runtimes
in seconds with respect to instance parameters for n ∈
{5,... , 500} and p
max
= 100. For parameters relative range
of due dates (rdd), and the average tardiness factor (tf ).
rdd/tf 0.2 0.4 0.6 0.8 1.0
0.2 0.07 2.16 5.16 1.64 0.04
0.4 0.04 0.36 1.64 0.05 0.04
0.6 0.04 0.06 0.47 0.04 0.04
0.8 0.04 0.04 0.07 0.04 0.04
1.0 0.04 0.04 0.04 0.04 0.04
ICORES 2020 - 9th International Conference on Operations Research and Enterprise Systems
64

Table 2: Optimality gap of HORDA, TTBR(Garraffa et al., 2018) and NBR(Holsenback and Russell, 1992) on instances with
p
max
= 100.
n TTBR NBR HORDA+NBR HORDA+NN
±25 time [s] gap [%] time [s] gap [%] time [s] gap [%] time [s]
225 1.05 ± 2.90 1.98 ± 0.58 0.06 ± 0.01 1.17 ± 0.47 1.19 ± 0.42 0.58 ± 0.30 5.03 ± 8.16
275 2.45 ± 4.19 2.12 ± 0.54 0.09 ± 0.02 1.31 ± 0.44 1.91 ± 0.62 0.57 ± 0.28 6.89 ± 9.62
325 4.72 ± 4.09 2.20 ± 0.50 0.12 ± 0.02 1.39 ± 0.43 2.87 ± 0.90 0.57 ± 0.37 9.25 ± 11.29
375 8.42 ± 4.75 2.27 ± 0.49 0.17 ± 0.03 1.46 ± 0.44 4.15 ± 1.31 1.23 ± 0.63 14.61 ± 13.52
425 14.42 ± 8.06 2.34 ± 0.46 0.21 ± 0.04 1.55 ± 0.41 5.52 ±1.71 1.71 ± 0.65 20.60 ± 17.00
Table 3: Optimality gap of heuristics on instances with p
max
= 5000.
n TTBR TTBR 10s NBR HORDA+NBR HORDA+NN
±25 time [s] gap [%] gap [%] gap [%] gap [%] time [s]
225 10.66 ± 9.20 0.17 ± 0.31 1.91 ± 0.60 1.10 ± 0.48 0.58 ± 0.27 3.58 ± 0.81
275 40.36 ± 32.24 0.77 ± 0.69 2.00± 0.54 1.20 ± 0.45 0.55 ±0.27 4.89 ± 1.02
325 92.30 ± 56.39 1.28 ± 0.86 2.27± 0.53 1.36 ± 0.47 0.53 ±0.33 6.61 ± 1.50
375 212.69 ± 122.14 1.87 ± 0.87 2.39 ± 0.47 1.50 ± 0.48 1.09 ± 0.60 10.32 ± 2.18
425 488.76 ± 265.88 2.64 ± 0.87 2.32 ± 0.44 1.52 ± 0.41 1.73 ± 0.64 14.96 ± 2.00
and Russell, 1992) and exact algorithm TTBR (Gar-
raffa et al., 2018). Finally, we discuss the advantages
of our proposed heuristic.
Experiments were run on a single-core of the
Xeon(R) Gold 6140 processor with a memory limit
set to 8GB of RAM. HORDA and NBR algorithms
were implemented in Python, and the neural network
is trained in Tensor Flow 1.14 on Nvidia GTX 1080
Ti. Source codes of TTBR algorithm were provided
by authors of (Garraffa et al., 2018) and it is imple-
mented in C.
4.1 Neural Network Training
We trained the neural network with Adam optimizer,
with learning rate set to 0.0001, early stop with pa-
tience equals to 5. Size of the LSTM layer is set to
512. For the neural network training, we generated
instances by scheme introduced by Potts and Wassen-
hove (Potts and Wassenhove, 1982). The scheme uses
two parameters; relative range of due dates (rdd),
and the average tardiness factor (tf ). The values of
rdd, tf typically used in the literature are rdd,tf ∈
{0.2,0.4,0.6, 0.8,1}. For each such rdd, tf and n ∈
{5,.. .,250}, we generated 5000 instances. There-
fore, the whole training dataset consists of 30625000
instances in total. Since we use a supervised learning
to train the neural network, we need optimal criterion
values that acts as labels.
It is easy to see that the dataset is enormous,
and it is necessary to solve millions of SMTTP in-
stances. However, this is not an issue since a sub-
stantial amount of the instances can be solved within
a fraction of a second. Moreover, the dataset can be
cheaply generated in the cloud, e.g., on the Amazon
EC2 cloud, the cost of generating the dataset is around
800$ and takes only ten days, which is significantly
cheaper compared to the cost of a human expert de-
veloping a heuristic algorithm.
Furthermore, it is important to stress that our neu-
ral network is able to generalize to larger instance
than used in the training. Therefore, it is possible
to train the neural network on smaller instances and
solve larger ones both in terms of the number of jobs
and their parameters.
4.2 Benchmark Instances
Benchmark instances used in this paper were gen-
erated in the manner suggested by Potts and Van
Wassenhove in (Potts and Van Wassenhove, 1991)
and used in Section 4.1. Potts and Van Wassenhove
generate processing times of jobs uniformly on the
interval from 1 to 100. We define maximal process-
ing time p
max
and generate processing time of jobs
in instance uniformly on the interval from 1 to p
max
.
For p
max
= 100 and n ∈ {5,. .., 500}, we generated
25 sets of benchmarks differing in rdd and tf . Then
those instances were solved by TTBR algorithm. Ta-
ble 1 shows average runtimes in seconds over (rdd,tf )
∈ {0.2,0.4,0.6,0.8, 1}
2
. The results imply, that the
hardest instances occur for rdd = 0.2 and tf = 0.6
(highlighted in Table 1 in bold), therefore our experi-
ments concentrate on them. Nevertheless, it is impor-
tant to stress that the neural network is trained on the
whole range of values (rdd,tf ). First, we do not want
Data-driven Algorithm for Scheduling with Total Tardiness
65
200
250
300
350
400
450
0
1
2
3
NN Generalization
n
optimality gap [%]
NBR
HORDA+NBR
HORDA+NN
TTBR 10s
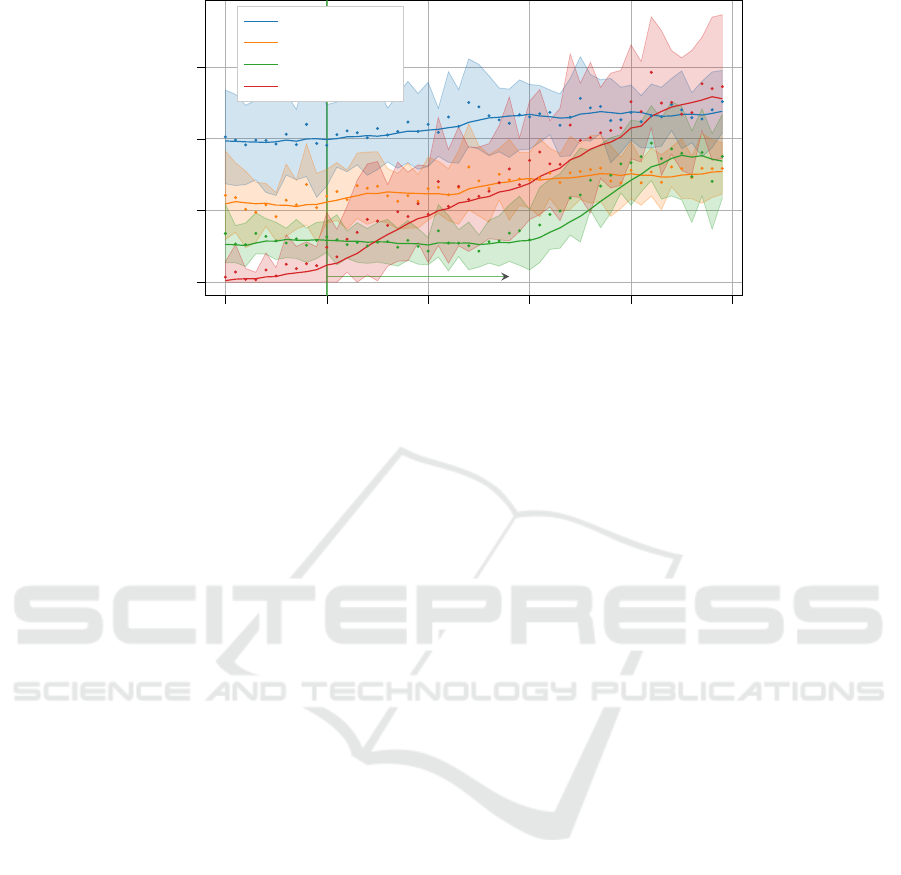
Figure 2: Optimality gap on instances with p
max
= 5000.
the algorithm to be limited to a specific class of in-
stances. Second, since our algorithm uses the decom-
positions, as described in Section 3.1, there is no guar-
antee that the subproblems have the same (rdd,tf ) pa-
rameterization as the input instance. In fact, during
the run of HORDA, the values of (rdd,tf ) in newly
emerged subproblems shift from the original ones.
4.3 Comparison with Existing
Approaches
In the first experiment, summarized in Table 2, we
concentrate on the comparison with NBR heuristic.
The benchmark instances used in this experiment
were generated with p
max
= 100. Each row in the ta-
ble represents a set of 200 instances of size from range
[n−25,n+25). The optimal solution was obtained by
TTBR algorithm. The table compares NBR heuristic
with HORDA algorithm where the regressor is substi-
tuted by NBR heuristic (denoted HORDA+NBR), and
HORDA heuristic with the neural network regressor
(denoted HORDA+NN). These three approaches are
compared in terms of the average CPU time, and the
average quality of solutions, measured by the optimal-
ity gap in percent. All values are reported together
with their standard deviation.
Results are shown from n = 200. For smaller n
than 200, TTBR is able to find the optimal solution un-
der a second, and because of this, the results of heuris-
tics are not relevant. The bold values in the table in-
dicate the best result over all the heuristic approaches
for the particular set of instances. The results show
that HORDA+NN has the best performance in terms of
the average optimality gap. In the case of the last data
set, the second heuristic HORDA+NBR is slightly bet-
ter. The reason is that the neural network was trained
only on instances with n ≤ 250. Therefore, one can
see that our neural network, used in the regressor, is
able to generalize the gained knowledge to instances
with n ≤ 400. On instances with n ≤ 325, the average
optimality gap of HORDA+NN is about 0.5%, which
outperforms all other methods. At the same time, we
have to admit that the heuristic is slower than TTBR
algorithm. Nevertheless, this is true only on instances
generated with p
max
= 100. On larger maximum pro-
cessing time, the CPU time of TTBR is significantly
larger as will be seen in the next experiment.
In literature, benchmark instances for SMTTP are
usually generated with p
max
= 100, as it was used in
the previous experiment. Since SMTTP is applica-
ble in production and grid computing and p
max
can be
much longer in these fields, we introduce the follow-
ing experiments with maximal processing time p
max
equal to 5000. Table 3 compares our HORDA +NN and
HORDA+NBR heuristics with NBR, TTBR and TTBR
with runtime limited to 10 s denoted as TTBR10s. For
TTBR 10s, a 10 s limit is selected with respect to the
HORDA+NN algorithm runtime, since the runtime of
HORDA+NN on instances with up to n = 350 is un-
der 10 s. Please note that the identical regressor as in
Table 2 was used, i.e., the regressor was trained only
on instances with p
max
= 100. Hence, it demonstrates
neural network’s ability of generalization outside the
training processing time range.
One can observe from Table 2 and Table 3 that
the CPU time of HORDA +NN is almost the same for
both types of instances. However, this is not true for
TTBR where the CPU time is almost 30 times higher
for n = 425. Also, the CPU time of TTBR is more than
30 times higher for n = 425 and p
max
= 5000 com-
pared to HORDA+NN. If the runtime of TTBR is lim-
ited to 10 s, then HORDA +NN outperforms TTBR10s
ICORES 2020 - 9th International Conference on Operations Research and Enterprise Systems
66

on larger instances. Moreover, the optimality gap of
HORDA+NN is practically the same as in the previous
experiment with p
max
= 100.
The same experiment is shown in the form of a
graph in Figure 2. It compares the optimality gap
of NBR, TTBR with a time limit, HORDA +NBR, and
HORDA+NN. The bold lines in the graph represent
the moving average (last 5 samples) of optimality
gap of each method, and the colored areas represent
their standard deviation. HORDA +NN outperforms
HORDA+NBR about two times up to instances of size
n = 360. For instances with n ≥ 405, HORDA+NBR,
is slightly better. In addition, HORDA+NN also
outperforms TTBR 10s from n = 265. Furthermore,
HORDA+NN holds the average optimality gap around
0.5% for instances with up to 350 jobs. The same can
be observed on instances with p
max
= 100 (see Ta-
ble 2). Finally, the runtime of TTBR grows exponen-
tially with the growing size of the instance, in contrast
to polynomial runtime of HORDA+NN.
Concerning the heuristic using the neural network
(HORDA+NN), it is important to stress that for in-
stances with n > 250 the network has to generalize
the acquired knowledge since it was trained only on
instances with n ≤ 250. This fact is indicated in Fig-
ure 2 by a green vertical line. It can be seen that
HORDA+NN is able to generalize results to instances
having 100 more jobs than instances encountered in
the training phase with 50 times larger maximal pro-
cessing time (instances for the training phase were
generated with p
max
= 100).
5 CONCLUSION
To the best of our knowledge, this is the first paper
addressing a scheduling problem using deep learn-
ing. Unlike the solution used in (Vinyals et al.,
2015), which tackled the Traveling Salesman Prob-
lem, we combined a state-of-the-art operations re-
search method with a DNN. The experimental results
show that our approach provides near-optimal solu-
tions very quickly and is also able to generalize the
acquired knowledge to larger instances without sig-
nificantly affecting the quality of the solutions. Our
approach outperforms state-of-the-art heuristic NBR.
Our approach is shown to be competitive and in some
cases, superior to the previous state-of-the-art algo-
rithms. Hence, we believe that the proposed method-
ology opens new possibilities for the design of effi-
cient heuristics algorithms.
ACKNOWLEDGEMENTS
The authors want to thank Vincent T’Kindt from
Universit de Tours for providing the source
code of TTBR algorithm. This work was sup-
ported by the European Regional Development
Fund under the project AI&Reasoning (reg. no.
CZ.02.1.01/0.0/0.0/15 003/0000466).
This work was supported by the Grant Agency of
the Czech Technical University in Prague, grant No.
SGS19/175/OHK3/3T/13.
REFERENCES
Antony, S. R. and Koulamas, C. (1996). Simulated anneal-
ing applied to the total tardiness problem. Control and
Cybernetics, 25:121–130.
Applegate, D., Bixby, R., Chvatal, V., and Cook, W. (2006).
Concorde TSP solver.
Bauer, A., Bullnheimer, B., Hartl, R. F., and Strauss,
C. (1999). An ant colony optimization approach
for the single machine total tardiness problem. In
Proceedings of the 1999 Congress on Evolution-
ary Computation-CEC99 (Cat. No. 99TH8406), vol-
ume 2, pages 1445–1450. IEEE.
Ben-Daya, M. and Al-Fawzan, M. (1996). A simulated
annealing approach for the one-machine mean tardi-
ness scheduling problem. European Journal of Oper-
ational Research, 93(1):61–67.
Cheng, T. E., Lazarev, A. A., and Gafarov, E. R. (2009).
A hybrid algorithm for the single-machine total tar-
diness problem. Computers & Operations Research,
36(2):308–315.
Della Croce, F., Tadei, R., Baracco, P., and Grosso, A.
(1998). A new decomposition approach for the single
machine total tardiness scheduling problem. Journal
of the Operational Research Society, 49(10):1101–
1106.
Deudon, M., Cournut, P., Lacoste, A., Adulyasak, Y., and
Rousseau, L.-M. (2018). Learning heuristics for the
tsp by policy gradient. In International Conference
on the Integration of Constraint Programming, Ar-
tificial Intelligence, and Operations Research, pages
170–181. Springer.
Dimopoulos, C. and Zalzala, A. (1999). A genetic
programming heuristic for the one-machine total
tardiness problem. In Proceedings of the 1999
Congress on Evolutionary Computation-CEC99 (Cat.
No. 99TH8406), volume 3, pages 2207–2214. IEEE.
Du, J. and Leung, J. Y. T. (1990). Minimizing total tardi-
ness on one machine is NP-Hard. Math. Oper. Res.,
15(3):483–495.
Garraffa, M., Shang, L., Della Croce, F., and T’Kindt, V.
(2018). An exact exponential branch-and-merge algo-
rithm for the single machine total tardiness problem.
Theoretical Computer Science, 745:133–149.
Data-driven Algorithm for Scheduling with Total Tardiness
67

Graham, R. L., Lawler, E. L., Lenstra, J. K., and Kan, A. R.
(1979). Optimization and approximation in determin-
istic sequencing and scheduling: a survey. Annals of
discrete mathematics, 5:287–326.
Hochreiter, S. and Schmidhuber, J. (1997). Long short-term
memory. Neural Comput., 9(8):1735–1780.
Holsenback, J. E. and Russell, R. M. (1992). A heuristic
algorithm for sequencing on one machine to minimize
total tardiness. Journal of the Operational Research
Society, 43(1):53–62.
Jain, A. S. and Meeran, S. (1998). Job-shop scheduling
using neural networks. International Journal of Pro-
duction Research, 36(5):1249–1272.
Khalil, E., Dai, H., Zhang, Y., Dilkina, B., and Song, L.
(2017). Learning combinatorial optimization algo-
rithms over graphs. In Advances in Neural Informa-
tion Processing Systems, pages 6348–6358.
Kool, W. and Welling, M. (2018). Attention solves your
TSP. arXiv preprint arXiv:1803.08475.
Koulamas, C. (2010). The single-machine total tardiness
scheduling problem: Review and extensions. Euro-
pean Journal of Operational Research, 202(1):1 – 7.
Lawler, E. L. (1977). A pseudopolynomial algorithm for se-
quencing jobs to minimize total tardiness. In Hammer,
P., Johnson, E., Korte, B., and Nemhauser, G., editors,
Studies in Integer Programming, volume 1 of Annals
of Discrete Mathematics, pages 331 – 342. Elsevier.
Milan, A., Rezatofighi, S. H., Garg, R., Dick, A. R., and
Reid, I. D. (2017). Data-driven approximations to NP-
hard problems. In AAAI, pages 1453–1459.
Panwalkar, S., Smith, M., and Koulamas, C. (1993).
A heuristic for the single machine tardiness prob-
lem. European Journal of Operational Research,
70(3):304–310.
Potts, C. and Van Wassenhove, L. N. (1991). Single ma-
chine tardiness sequencing heuristics. IIE transac-
tions, 23(4):346–354.
Potts, C. and Wassenhove, L. V. (1982). A decomposition
algorithm for the single machine total tardiness prob-
lem. Operations Research Letters, 1(5):177 – 181.
Russell, R. and Holsenback, J. (1997). Evaluation of
greedy, myopic and less-greedy heuristics for the sin-
gle machine, total tardiness problem. Journal of the
Operational Research Society, 48(6):640–646.
Silver, D., Huang, A., Maddison, C. J., Guez, A., Sifre, L.,
Van Den Driessche, G., Schrittwieser, J., Antonoglou,
I., Panneershelvam, V., Lanctot, M., et al. (2016).
Mastering the game of go with deep neural networks
and tree search. nature, 529(7587):484.
S
¨
uer, G. A., Yang, X., Alhawari, O. I., Santos, J., and
Vazquez, R. (2012). A genetic algorithm approach for
minimizing total tardiness in single machine schedul-
ing. International Journal of Industrial Engineering
and Management (IJIEM), 3(3):163–171.
Sundermeyer, M., Schl
¨
uter, R., and Ney, H. (2012). Lstm
neural networks for language modeling. In Thirteenth
annual conference of the international speech commu-
nication association.
Szwarc, W., Della Croce, F., and Grosso, A. (1999). So-
lution of the single machine total tardiness problem.
Journal of Scheduling, 2(2):55–71.
Szwarc, W. and Mukhopadhyay, S. K. (1996). Decompo-
sition of the single machine total tardiness problem.
Operations Research Letters, 19(5):243–250.
V
´
aclav
´
ık, R., Novak, A.,
ˇ
S
˚
ucha, P., and Hanz
´
alek, Z.
(2018). Accelerating the branch-and-price algorithm
using machine learning. European Journal of Opera-
tional Research, 271(3):1055 – 1069.
V
´
aclav
´
ık, R.,
ˇ
S
˚
ucha, P., and Hanz
´
alek, Z. (2016). Roster
evaluation based on classifiers for the nurse rostering
problem. Journal of Heuristics, 22(5):667–697.
Vinyals, O., Fortunato, M., and Jaitly, N. (2015). Pointer
networks. In Advances in Neural Information Pro-
cessing Systems, pages 2692–2700.
Zhou, D. N., Cherkassky, V., Baldwin, T. R., and Olson,
D. E. (1991). A neural network approach to job-shop
scheduling. IEEE Transactions on Neural Networks,
2(1):175–179.
ICORES 2020 - 9th International Conference on Operations Research and Enterprise Systems
68
