
Working Progress towards Lawn Mower Automation
Alfredo Ch
´
avez Plascencia
1 a
, V
´
ıt
ˇ
ezslav Beran
1 b
, Jaroslav Rozman
1 c
and Aguilar Acosta Armando
2 d
1
BUT FIT IT4Innovations, Czech Republic
2
University of Guadalajara, School of Mechatronics,
Carretera Guadalajara - Ameca Km. 45.5, C.P. 46600, Ameca, Jalisco, Mexico
Keywords:
Mobile Robot, Nonlinear Control, Path Planning.
Abstract:
This paper is a working progress towards an automation of the Spider lawn mower (SLM) which is a four syn-
chronized steering wheel mobile robot. During the functioning, the SML must follow cutting grass edge with
no overlapping of a strip of cut grass and also satisfy slippage constrains. To this end, a small prototype called
Andromina which is a four-independent steering wheel mobile robot has been chosen to verify the control
approach. This paper proposes to implement a mathematical model that takes into account the kinematics and
dynamics of the mobile robot and also a nonlinear control strategy like the state feedback linearization. The
most important advantage of the proposed model-control strategy is that it takes into account the nonlinearities
of the system and a control law becomes a linear one. The path following tracking error has been verified by
the statistical approach called analysis t-test and also results of real data simulations have shown the effective-
ness of the proposed control strategy applied to a four-independent steering nonholonomic wheeled mobile
robot.
1 INTRODUCTION
Mobility and controllability of lawn mower ma-
chines (LMM) is still an immature open research field
(Wasif, 2011). A brief review of the state of the art of
LMM is carried out in (Wasif, 2011) where it states
that (Smith et al., 2005) proposes a design of a mobile
robot which lacks to discuss propositions of mowing
operation. Moreover, static localization and dynamic
obstacle avoidance are overlooked. And, the system
is controlled manually lacking artificial intelligence.
(Bing-Min and Chun-Liang, 2008) suggests an opti-
mal route planning of a mobile robot where it does not
converge autonomously to the path. Moreover, obsta-
cle avoidance algorithm would work for static obsta-
cles not for dynamic ones. The fundamental idea of
LMM as a mobile robot is discussed in (Taj and Timo-
thy, 2008) lacking simulation and implementation re-
sults. The work done in (Wasif, 2011) suggests a mo-
tor schema architecture to control a LMM and also
the system suffers from slippage conditions. From
a
https://orcid.org/0000-0002-7505-5570
b
https://orcid.org/0000-0002-7495-6932
c
https://orcid.org/0000-0001-8443-433X
d
https://orcid.org/0000-0003-4920-527X
our point of view, the systems mentioned previously
lack a complete mathematical formulation of a LMM
that can potentially allow the system to be controlled
by some classical control strategies. They also lack
slippage uncertainties than can be added to the math-
ematical model of the system. The objective of this
proposal is to cope with some of the drawbacks pre-
sented in the previous works by adding a mathemati-
cal model and a control functionality to the system.
To this end, some control strategies for mobile
robots are found in the literature. For instance,
(Mathieu et al., 2017) uses a backstepping method
to address a four-wheel steering mobile robot fol-
lowing a path which an observer is used to esti-
mate the lateral sliding. (Krzysztof and Dariusz,
2004) also uses a backstepping approach to solve the
control issue and the stability is proof by the Lya-
punov technique. (Paulo and Urbano, 2005) shows
an input-output feedback-linearization method in dis-
crete mode for the path following of wheeled mobile
robots (WMRs) subject to nonholonomic constraints.
(Harwood, 2016) controls a automower 330x using
feedback linearization and with the feedback gain es-
timated using an LQ-controller.
The control strategy proposed in this article is
feedback linearization which is one of the most com-
Plascencia, A., Beran, V., Rozman, J. and Armando, A.
Working Progress towards Lawn Mower Automation.
DOI: 10.5220/0008924300990108
In Proceedings of the 17th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2020), pages 99-108
ISBN: 978-989-758-442-8
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
99

mon approaches to control nonlinear systems. The
advantage of this technique is the transformation ion
of the nonlinear system into a linear one by means of a
proper transformation of variables. The intention is to
apply the control strategy to the SLM and due to the
Spider system is not available at the moment of this
work, the system Andromina has been taken into ac-
count to apply the model-control strategy. The Spider
(Spider, 2015) as well as the Andromina (Andromina,
2016b) mobile robots are shown in Figures 1 and 2
respectively.
2 METHODS
Robot operating system (ROS) (Quigley et al., 2009)
is suggested to be used to handle the automation of the
SLM. The navigation stack (NS) that comes with ROS
installation is a set of configurable nodes that need to
be set up properly to the dynamics of the mobile robot
in turn. In other words, the move base node is the
core of the navigation stack which offers interfaces
between sensors and algorithms for: localization, lo-
cal and global path planners, local and global maps.
For instance, the global map is formed by the gmap-
ping node, which is based on simultaneous localiza-
tion and mapping (SLAM). Then, during the work-
ing of the robot, the NS interacts with sensor read-
ings, localization, path planing and map algorithms to
avoid obstacles on the path in order to reach a speci-
fied goal (Fox et al., 1999). Further on, the dynamic
window approach planner (DWAP) and the Dijkstra’s
algorithm nodes are used by the NS to guarantee ob-
stacle avoidance (Fox et al., 1997). Thus, given a
global path to follow the NS uses the costmap node
that takes in the sensor data to build and inflate a local
2D occupancy grid map. This package also provides
support to the DWAP that generates the velocity com-
mands that drive the robot from an initial to a final
coordinate. In this approach, a nonlinear control node
has been created and inserted into the NS.
3 MATHEMATICAL MODEL AND
CONTROL
A four-independent steering wheeled mobile robot
model and nomenclature has been inspired from
(Ch
´
avez Plascencia and Dremstrup, 2011) and pre-
sented in Figure 3.
3.1 Kinematic Model
(Guy et al., 1996) imposes two restrictions to the kine-
matic model; a) Rolling without slipping and b) no
sidelong motion. Equations 1 and 2 are the restric-
tions to the wheels with respect to P
c
and, they can
also be arranged in a more compact form as shown in
Equations 3 and 4.
[cos(β
i
) sin(β
i
) l
i
sin(β
i
− α
i
)]R(θ)
˙
ξ − r
˙
ψ
i
= 0
(1)
[sin(β
i
) − cos(β
i
) − lcos(α
i
− β
i
)]R(θ)
˙
ξ = 0
(2)
J
1
(β
i
)R(θ)
˙
ξ − J
2
˙
ψ
i
= 0 (3)
C
1
(β
i
)R(θ)
˙
ξ = 0 (4)
where; i = 1,2,3,4, R(θ) is the 2D rota-
tion matrix from frame {E} to frame {W }, ξ =
[x
c
,y
c
,θ]
T
represents the robot pose at the point P
c
,
β
i
= [β
1
,β
2
,β
3
,β
4
]
T
is the steering wheel angle vector
and ψ
i
= [ψ
1
,ψ
2
,ψ
3
,ψ
4
]
T
is the rotation wheel angle
vector. (N.Sarkar and R.V.Kumar, 1992) defines q as
n generalized coordinates that fall into m restrictions
which can be organized as C(q, ˙q), where k represents
holonomic restrictions and m − k represents nonholo-
nomic restrictions as presented in Equation 5.
A(q) ˙q = 0 (5)
With
A(q) =
J
1
(β)R(θ) 0 −J
2
C
1
(β)R(θ) 0 0
(6)
˙q =
˙x
c
˙y
c
˙
θ
˙
β
i
˙
ψ
i
(7)
where; A(q) is a (m × n) full rank matrix.
Some remarks about C(q, ˙q) can be stated as fol-
lows:
• If a restriction equation is in the form C( ˙q) and
it can be integrated, such restriction is a holo-
nomic one.
• If a restriction equation is in the form C( ˙q) and
it can not be integrated, such restriction is a
nonholonomic one.
According to (Coelho and Nunes, 2003), the
Equation C
1
(q)S(q) = 0 can be obtained from Equa-
tion 5, where S(q) is a linear independent vector field
and N(C) is the null space of C
1
(q). And, it is also
possible to define a velocity η(t) such that for all t,
then Equation 8 can be stated.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
100

Figure 1: The Spider lawn mower robot.
˙q = S(q)η(t) (8)
Equation 8 gives a kinematic model.
In order to relate Equation 8 with the four-
independent steering wheeled kinematic model, the
no lateral movement constraint 4 is taken. It can be
seen that R(θ)
˙
ξ lies in the null space of N (C
1
(β)).
Then, defining N (C
1
(β)) = Σ(β) yields the follow-
ing relation N (C
1
(β))η(t) = Σ(t)η(t) = R(θ)
˙
ξ. Af-
terwards, isolating
˙
ξ from the previous equation and
then substituting it into Equation 3 and defining the
steering velocity vector
˙
β = ζ = [ζ
1
, ζ
2
, ζ
3
, ζ
4
], the
kinematic model is obtained as shown in Equation 9
which is of the form ˙q = S(q)u(t).
˙
ξ
=
R
T
(θ)Σ(θ)
η(t)
(9)
According to (Guy et al., 1996), in order to guar-
antee maneuverability δ
M
of the SLM the degree of
mobility δ
m
and the degree of steeribility δ
s
, Equa-
tions 10 and 11 must satisfy the following conditions:
1 ≤ δ
m
≤ 3 and 0 ≤ δ
s
≤ 2.
δ
m
= dimN [C
1
(β)] = 3 − rank[C
1
(β)] (10)
δ
s
= rank[C
1
(β)] (11)
3.2 Dynamic Model
The relation between the torques τ derived by the em-
barked motors and the change in velocities ˙u in the
SLM can be described by the dynamic model. The
equations of motion that relates τ and ˙u can be de-
rived by means of the Lagrangian formalism as stated
in Equation 12, (Bloch, 2000; Symon, 1971; Gold-
stain, 1980).
d
dt
∂L(q, ˙q)
∂ ˙q
!
−
∂L(q, ˙q)
∂q
= M
I
(q) ¨q +V (q, ˙q)
= A
T
(q)λ +B(q)τ (12)
Figure 2: Andromina.
2r
e
1
a
x
θ
A
1
w
f l
w
f r
A
4
A
3
w
br
w
bl
A
2
b
P
c
CM
e
2
{W }
{E}
α
1
l
1
x
c
y
y
c
Figure 3: The four-independent steering wheeled mobile
robot geometry. E is a fixed frame on the robot with axis
e
1
and e
2
, W is world frame. θ is the angle of rotation, CM
is the center of mass.
The definition of the nomenclature in Equation 12 is
taken from (Ch
´
avez Plascencia and Dremstrup, 2011)
and stated as follows:
L(q, ˙q) is called the Lagrangian.
M
I
∈ R
n×n
is the matrix that represents the inertia
of the system.
V (q, ˙q) ∈ R
n×n
is the matrix of Coriolis.
A(q) is the matrix that represents the Jacobean.
B(q) ∈ R
n×(n−m)
is an input transformation ma-
trix.
τ ∈ R
(n−m)
is a torque vector that represents the
input.
λ ∈ R
m
is the Lagrangian multipliers.
q represents the generalized coordinates.
(Ch
´
avez Plascencia and Dremstrup, 2011) takes
the potential energy of the system as constant and it
is neglected from the Lagrangian multiplier. This fact
leads the Lagrangian L as function of the kinetic en-
ergy T, i.e. L = f (T ).
Working Progress towards Lawn Mower Automation
101

To solve Equation 12, the same methodology as
stated in (Ch
´
avez Plascencia and Dremstrup, 2011) is
applied. This is done in three steps. First, an individ-
ual kinetic energy of each wheel is solved. Second,
the kinetic energy of the chassis is also solved. And,
finally, all the energies are added to get a single en-
ergy.
The kinetic energy T
w
of a single steering wheel
attached to the trolley can be obtained by inte-
gration of an infinitesimal mass d
m
[Kg] of a point
P
w
(x
P
w
,y
P
w
,z
P
w
) which is placed on the surface of the
wheel. The radius r from the center of the wheel to
the point P
w
forms an angle ψ. Then, the velocity of
the point P
w
on the wheel is solved and then multi-
plied by the angular density ρ
α
[Kg/rad]. The former
process is shown in Equations 13 and 14.
P
w
=
x
c
+ lcos(α +θ) + rcos(ψ)cos(θ + β)
y
c
+ lsin(α +θ) + rcosψsin(θ+ β)
rsin(ψ)
(13)
T
w
=
1
2
Z
2π
0
( ˙x
2
P
w
+ ˙y
2
P
w
+ ˙z
2
P
w
)ρ
α
dψ (14)
The kinetic energy of each individual wheel can
be obtained by inserting Equation 13 into Equation
14. The result is shown in Equation 15.
T
w
=
1
2
m
w
˙x
2
c
+
1
2
m
w
˙y
2
c
+ m
w
l
˙
θ( ˙y
c
cos(α + θ)
− ˙x
c
sin(α + θ)) +
1
2
m
w
l
2
˙
θ
2
+
1
2
I
w
˙
ψ
2
+
1
4
I
w
˙
β
2
+
1
2
I
w
˙
θ
˙
β +
1
4
I
w
˙
θ
2
(15)
I
w
= m
w
r
2
being the wheel’s inertia and m
w
=
2πρ
α
the mass’ wheel.
(Ch
´
avez Plascencia and Dremstrup, 2011) states
that the kinetic energy of a moving chassis can be ob-
tained by adding translational and rotational energies,
as it is presented in Equation 16.
T
F
=
1
2
M
T
( ˙x
2
c
+ ˙y
2
c
) +
1
2
I
T
˙
θ
2
(16)
˙x
c
= ˙x − d
˙
θsin(θ + ρ) (17)
˙y
c
= ˙y + d
˙
θcos(θ + ρ) (18)
Where; M
T
[Kg] is the chassis’s mass, ( ˙x
2
c
+
˙y
2
c
)[m/sec] is the linear velocity of the trolley about its
CM, I
T
[Kg · m
2
] is the inertia’s moment of the chassis,
˙
θ[Rad/s] is the angular velocity and d[m] is the dis-
tance from the CM to the center of the robot.
Then, inserting 17 and 18 into 16, the Equation
19 is obtained. This equation represents the kinetic
energy of the chassis of the robot.
T
F
=
1
2
M
T
˙x
2
c
+
1
2
M
T
˙y
2
c
+
1
2
M
T
d
2
˙
θ
2
+
1
2
I
T
˙
θ
2
− M
T
d ˙x
2
c
˙
θsin(θ + ρ) + M
T
d ˙y
2
c
˙
θcos(θ + ρ)
(19)
By adding the individual wheel kinetic energy
with the chassis kinetic energy a total kinetic energy
is obtained as it can be seen in Equation 20.
T = T
F
+
4
∑
i=1
T
w
i
(20)
By expanding Equation 20 and then arranging it
into a matrix form gives Equation 21 which is the total
kinetic energy of the SLM with respect to its CM.
T =
1
2
˙
ξ
T
R(θ)
T
MR(θ)
˙
ξ +
1
4
˙
β
T
I
W M
˙
β
+
1
2
ψ
T
I
W M
˙
ψ +
1
2
˙
θI
WV
˙
β (21)
W here :
I
W M
=
I
w
0 0 0
0 I
w
0 0
0 0 I
w
0
0 0 0 I
w
I
WV
=
I
w
I
w
I
w
I
w
M =
M
1
0 M
2
0 M
1
M
3
0 0 M
4
M
1
= M
T
+ 4m
w
M
2
= −2
h
dM
T
sin(ρ) + m
w
4
∑
i=1
l
i
sin(α
i
)
i
M
3
= 2
h
dM
T
cos(ρ) + m
w
4
∑
i=1
l
i
cos(α
i
)
i
M
4
= d
2
M
T
+ I
T
+ m
w
4
∑
i=1
l
2
i
+ 2I
w
(22)
The dynamic model of the SLM with emphasis
in steering wheels can be derived according to the
procedure stated in (Guy et al., 1996). To this end,
the matrices A
T
(q) and B(q) = [0
3×8
;I
8×8
] are re-
placed in the right expression of Equation 12. The
Lagrange equations of motion of the SLM with La-
grangian multipliers λ
1
and λ
2
are given by Equations
23 to 25.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
102

d
dt
∂T
∂
˙
ξ
−
∂T
∂ξ
=[T ]
ξ
= R
T
(θ)J
T
1
(β)λ
1
+R
T
(θ)C
T
1
(β)λ
2
(23)
d
dt
∂T
∂
˙
β
−
∂T
∂β
=[T ]
β
=τ
β
(24)
d
dt
∂T
∂
˙
ψ
−
∂T
∂ψ
=[T ]
ψ
=−J
T
2
λ
1
+ τ
ψ
(25)
The next step is to eliminate the Lagrange co-
efficients from Equations 23 and 25. To do so,
the Equations 23 and 25 are premultiplied from the
left with Σ(β)R(θ) and Σ
T
(β)J
T
1
(β)J
−T
2
respectively,
and then summed up and taking into account that
Σ
T
(β)C
T
1
(β) = 0
1×4
. This leads to two equations,
from which the Lagrange coefficients have been dis-
appeared. Furthermore, the total kinetic energy Equa-
tion 21 is inserted in the left side of Equations 23,
24 and 25 respectively. Once [T ]
ξ
,[T ]
β
and [T ]
ψ
are
solved, they are inserted in the first two equations
with no Lagrangian coefficients. This step leads up
to two new equations that contain the velocity
˙
ξ,
˙
ψ,
˙
β and acceleration
¨
ξ,
¨
ψ,
¨
β terms. Then, with the aid
of the kinematic equations and their derivatives and
substituting them back and arranged them in a matrix
format yields the Equation 26 which is the dynamic
model of the system.
H(β) ˙u + f (β,u) = F(β)τ (26)
Where:
τ =
τ
ψ
τ
β
F(β) =
Σ
T
(β)E
T
(β) 0
4×4
0
4×4
I
4×4
P =
M
1
0 P
1
0 M
1
P
2
P
3
P
4
M
4
P
1
=
1
2
(M
2
cos(θ) − M
3
sin(θ))
P
2
=
1
2
(M
3
cos(θ) + M
2
sin(θ))
P
3
=
1
2
(M
2
cos(θ) − M
3
sin(θ))
P
4
=
1
2
(M
3
cos(θ) + M
2
sin(θ))
E(β) = J
−1
2
J
1
(β)
f (β,u) =
f
1
(β,u)
f
2
(β,u)
(27)
f
1
(β,u) = Σ
T
(β)
h
R(θ)
˙
PR
T
(θ) +R(θ)P
˙
R
T
(θ)
−
1
2
R(θ)K
1
η
T
Σ
T
(β)N
+E
T
(β)I
W M
˙
E(β)
i
Σ(β)η
+Σ
T
(β)
h
R(θ)PR
T
(θ)
+E
T
(β)I
W M
E(β)
i
˙
Σ(β)η
f
2
(β,u) =
1
2
¨
θI
w
K
2
H(β) =
H
1
(β) H
2
(β)
0
1×4
1
2
I
W M
H
1
(β) = Σ
T
(β)
h
R(θ)PR
T
(θ)
+E
T
(β)I
W M
E(β)
i
Σ(β)
H
2
(β) =
1
2
Σ
T
(β)R(θ)K
1
I
WV
The kinematics and dynamics of the SLM can be
written in state space representation as stated in Equa-
tions 28 and 29.
H(β) ˙u = − f (β,u) +F(β)τ (28)
˙q = S(q)u (29)
3.3 Control by Feedback Linearization
State feedback linearization has been chosen to tackle
the dynamics of the system. (Coelho and Nunes,
2003; Ch
´
avez Plascencia and Dremstrup, 2011) state
that if in a nonlinear system one or more restrictions
are nonholonomic the system is not fully state lin-
earizable, however it can be input-output linearizable.
One of the characteristics in input-output feedback
linearization is to find a change of variables such that
z = T (x) and x = T
−1
(z) is diffeomorphism, bringing
the nonlinear system into a normal form. This form
decomposes the nonlinear system into external and in-
ternal parts respectively, making the system partially
linearizable. The output of the system in turn can see
the external variables but not the internal ones. The
external part can be linearized and be transformed into
a linear canonical form. It would be worth to analyz-
ing the stability of the internal part by means of the
zero dynamics of the system (Khalil, 2002; Marquez,
2003). When dealing with the external part, the num-
ber of output equations can be chosen by means of the
relative degree of the system.
Working Progress towards Lawn Mower Automation
103

To this end, the state representation stated in
Equations 28 and 29 is arranged in the following ma-
trix form.
˙q
˙u
=
S(q)u
−H
−1
f
+
0
H
−1
f
τ
(30)
In the previous matrix expression, u is defined as
[η,
˙
β
1
,
˙
β
2
]. Notwithstanding, the angular velocities
[
˙
β
1
,
˙
β
2
] are not taken into account because ˙q depends
only on η then u = η.
The state representation stated in Equation 30 can
be linearized by choosing a nonlinear feedback Equa-
tion τ = F
†
[Hν + f ] and it can also be arranged in a
general nonlinear form as shown in Equations 31, 32
and 33.
˙x = f (x)+ g(x)η
y = h(x) (31)
˙q
˙
η
=
S(q)η
0
+
0
1
ν
(32)
y = h(q)
˙x =
˙q
˙
η
, f (x) =
S(q)η
0
, g(x) =
0
1
(33)
In order to achieve input-output linearization, an
analysis of the output equation y = h(q) must be
taken. In other words, the position vector q =
[x
c
,y
c
,θ] is of interest, then three output equations are
formulated as stated in the Equation 34.
h(q) =
h
1
(q)
h
2
(q)
h
3
(q)
= y =
y
1
y
2
y
3
=
x
c
y
c
θ
(34)
The output Equation 34 must be derived till it finds
the input
˙
η (Khalil, 2002). Equation 35 shows that the
output y has been derived twice till it finds the input
˙
η, thus having a relative degree ρ
r
= 2.
˙y
¨y
=
Jh(q)S(q)η
˙
Φ(q)η + Φ
˙
η
(35)
Where:
J =
∂q
∂x
c
∂q
∂y
c
∂q
∂θ
, Φ(q) = Jh(q)S(q)
(36)
J is the Jacobean. Since ˙q =
˙
ξ = R
T
(θ)Σ(β)η
Equation 35 can also be arranged as follows:
˙y = R
T
(θ)Σ(β)η (37)
¨y =
˙
R
T
(θ)Σ(β)η +R
T
(θ)
˙
Σ(β)η + R
T
(θ)Σ(β)
˙
η
A state variable transformation vector which is a
diffeomorphism as defined in (Andersen et al., 2002)
is stated as follows.
z = T (q) =
z
1:6
T
=
y
1:3
, ˙y
1:3
T
=
y
˙y
=
h(q)
− − −
L
f
h(q)
=
h(q)
− − −
R
T
(θ)Σ(β)η
(38)
The system under the new state variable transfor-
mation vector T(q) is characterized by the following
dynamics:
˙z =
˙z
1:6
T
=
˙y
¨y
=
"
˙
ξ
d
dt
R
T
(θ)Σ(θ)η
#
=
A
c
z + B
c
β(z)[ν −α(z)]
(39)
Where:
A
c
=
0
3×3
I
3×3
0
3×3
0
3×3
, B
c
=
0
3×3
I
3×3
(40)
β(z) and α(z) are found by calculating
d
dt
R
T
(θ)Σ(θ)η
as it is shown as follows:
β(z)[ν −α(z)] =
d
dt
R
T
Σ(θ)η
W here :
β(z) = R
T
(θ)
Σ(β) S
g
η
α(z) = −β
−1
(z)
˙
R
T
(θ)Σ(θ)η
ˆ
ν =
˙
η ζ
1
ζ
2
S
g
=
(s
11
+ s
12
) (s
13
+ s
14
)
(s
21
+ s
22
) (s
23
+ s
24
)
(s
31
) (s
32
)
With :
s
11
= −l
1
cos(β
2
)sin(β
1
− α
1
)
s
12
= l
2
sin(β
1
)cos(β
2
− α
2
)
s
13
= −l
1
cos(β
2
)cos(β
1
− α
1
)
s
14
= l
2
cos(β
1
)sin(β
2
− α
2
)
s
21
= −l
1
sin(β
2
)cos(β
1
− α
1
)
s
22
= −l
2
cos(β
1
)cos(β
2
− α
2
)
s
23
= l
1
cos(β
2
)cos(β
1
− α
1
)
s
24
= l
2
sin(β
1
)sin(β
2
− α
2
)
s
31
= cos(β
1
− β
2
)
s
32
= −cos(β
1
− β
2
)
In the previous Equations ν = [
˙
η
˙
ζ
1
˙
ζ
2
]
T
and
ˆ
ν =
[
˙
η ζ
1
ζ
2
]
T
, e.g. ν 6=
ˆ
ν. This mean that the input to the
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
104
Input
Reference
Linear System
˙z = A
c
z + B
c
ϑ
1
s
of the
System
Output
−
ξ
ref
˙
ξ
ref
=r
ϑ
N
u
−K
Linear
Controller
N
z
+
+
+ +
z =
˙
ξ
, ξ
T
˙z
Figure 4: Shows the linear system together with the refer-
ence input.
model ν given by equation 32 is not the same as the
input
ˆ
ν given by the design control law. This problem
can be solved by differentiating the last two terms of
ˆ
ν.
Moreover, the control law of the form
ˆ
ν = α(z) +
β
−1
(z)ϑ transforms the system represented in Equa-
tion 39 into a linear one as it is shown in Equation
41.
˙z = A
c
z + B
c
ϑ (41)
This linearized system is a controllable one. And,
this can be easily verified by just looking at the ma-
trices A
c
and B
c
which are in controllable canonical
form. The vector ϑ which contains the accelerations
from the linear controller has to be designed in order
for the robot to follow a reference input r. Accord-
ing to the linear control theory (Franklin and Powell,
1994) the control input ϑ that allows the system to
follow the reference input r is stated in Equation 42.
ϑ = −Kz + (N
u
+ KN
z
) (42)
W here :
N
u
= −B
−1
c
A
c
C
−1
c
N
x
= C
−1
c
r = [x
c
,y
c
,θ, ˙x
c
, ˙y
c
,
˙
θ]
T
Figure 4 shows the linearized system together with
the reference control input r.
4 CONTROL SIMULATION
RESULTS
The andromina ROAD-OFF V.2.0 robot (Andromina,
2016a) has been used as a test platform. It
has been equipped with the following hardware;
Lenovo ThinkPad L540 + Intel(R) Core(TM) i7-
4712MQ CPU @ 2.30GHz, Arduino Mega 2560
(Arduino, 2016), Four Micro DC motors with en-
coders (SKU, 2016), Four Servos, Hokuyo URG-
04LX-UG01 laser scanner (Hokuyo, 2009), Adafruit
Motor/Stepper/Servo Shield for Arduino v2 Kit -
v2.3 (Adafruit, 2016a), Adafruit 16-Channel 12-bit
PWM/Servo Shield (Adafruit, 2016b). Figures 5 and
6 show the Andromina and the implemented hard-
ware.
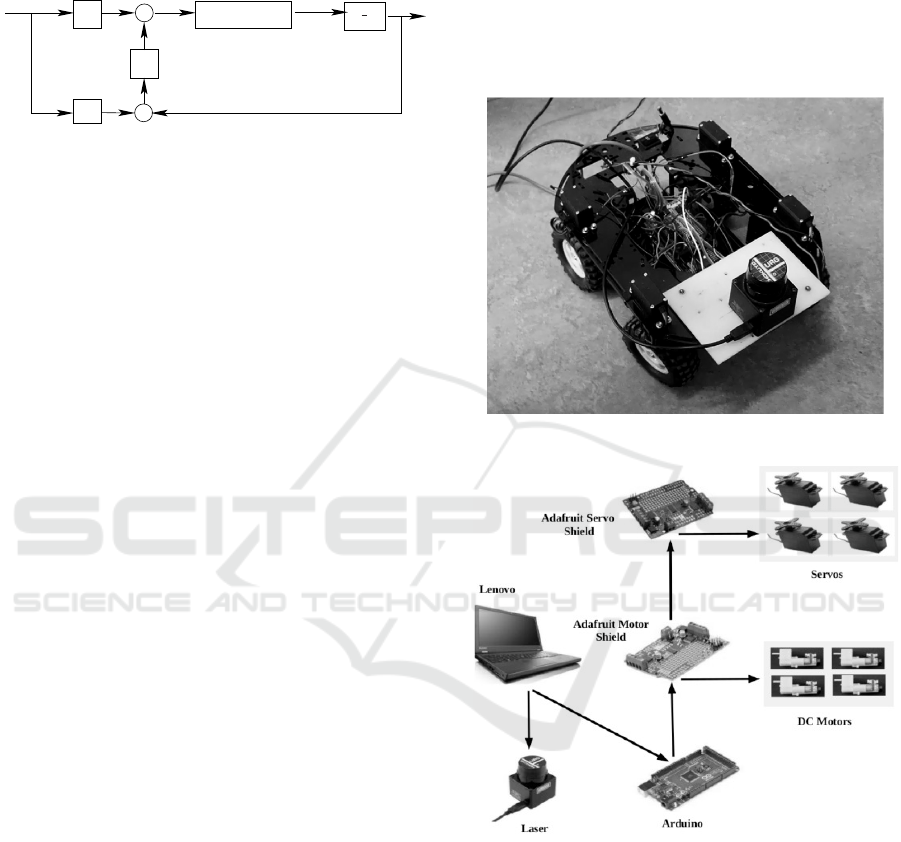
Figure 5: Shows the equipped andromina robot.
Figure 6: The Lenovo laptop communicates over a USB ca-
bles to the laser and Arduino. This in turn communicates
with the Adafruit motor and servo shields which communi-
cates with the four DC motors and four servos respectively.
The simulation has been carried out in two steps,
firstly it is simulated under Octave and secondly under
ROS.
4.1 Octave Simulation
A realistic path from a laboratory using a real map un-
der ROS-RVIZ have been taken and stored in memory
and then loaded with an Octave function for its anal-
Working Progress towards Lawn Mower Automation
105

(a)
(c)
(b)
(d)
Figure 7: (a) Angle β
1
. (b) Angle β
2
. (c) Angle θ. (d) Control trajectory and the reference input.
ysis. The results of the nonlinear control simulation
can be depicted in Figure 7(a-c). The angles β
1
and
β
2
are shown in Figure 7(a)(b). It can be seen that
these angles oscillate around 0 degrees, this means
that they do not move far from the robot chassis, in
other words, one can say that the nonlinear model
generates the proper steering angles for the wheels to
follow the trajectory path. Figure 7(c) depicts the an-
gle θ which is the angle of the robot chassis frame
with respect to the world frame. Finally, the ROS-
RVIZ planned trajectory is shown in Figure 7(d) as a
dark gray color whereas the nonlinear control that fol-
lows the planned trajectory is shown as a bright gray
color. It can easily be noticed how the control moves
the chassis [x
c
,y
c
] according to the planned path and
as mentioned earlier.
The previous parameters β
1
, β
2
, θ and the nonlin-
ear control path tracking [x
c
,y
c
] which are depicted
in Figure 7(a-c) have been taken as the inputs of an
Octave function called ”animation2(x
c
,y
c
,θ,β
1
,β
2
)”.
The outcome of the simulated result is shown in Fig-
ure 8. In this figure, the position of the robot [x
c
,y
c
]
is represented as an asterisk during the tracking path,
the chassis is represented as black square which cen-
ter is the position of the robot [x
c
,y
c
], the wheels are
represented as black rectangles which center is placed
at each vertex of the chassis. It can be noticed that the
orientation of the wheels, angles β
1
, β
2
, β
3
and β
4
correspond to the orientation of the tracking path and
the perpendicular wheel lines shall meet a single ICR.
-1 0 1 2 3 4 5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
X [m]
Y [m]
[X, Y] position
Figure 8: Shows the chassis and position of the center of
gravity during the control trajectory. And, also shows the
position of the wheels according to the trajectory.
4.2 ROS Simulation
The results of the created ROS node that simulates
the nonlinear system can be depicted in Figures 9
and 10. At the start of the simulation, the ROS node
waits for the initial position which is achieved by left
mouse clicking on the ”2D Pose Estimate” RVIZ but-
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
106

ton. Then, by left clicking on the ”2D Nav Goal”
RVIZ button a destination goal is chosen and the sta-
ble path is loaded and the control starts tracking the
reference path as it is depicted in Figure 10. It can
also be seen in this Figure that the laser position got
shifted.
Figure 9: The Figure shows the initial position and orienta-
tion of the robot.
Figure 10: The darkest line is the stable loaded path and the
less dark line is the tracking control. The shifted line is the
tracking laser position.
4.3 Independent t-test
By looking at the Figure 7(d) one can see that two tra-
jectories are almost identical, however it is necessary
to show if there is any statistical evidences to affirm
or reject this statement. To this end, differences in the
two trajectories were assessed by t-test statistics. For
that, two hypothesis were established: null hypothesis
H
0
: µ
1
= µ
2
and alternative hypothesis H
1
: µ
1
6= µ
2
.
The aim of the t-test is to accept or reject the null hy-
pothesis. For that, two t-values are needed namely the
calculated t-value and the critical t-value. If the cal-
culated t-value is greater than the critical t-value then
the null hypothesis is rejected. In order to calculate
the t-value, the mean µ, variance σ
2
and sample size n
of each trajectory must be obtained. The t-value can
be computed by the Equation 43, whereas the criti-
cal t-value can be got from the t-table 1 which shows
that the calculated t-value is less than critical t-value.
Then, the null hypothesis can be accepted.
t =
µ
1
− µ
2
r
σ
2
1
n
1
+
σ
2
2
n
2
(43)
Table 1: The table shows the mean, variance of the planned
trajectory as well as the control. It also shows the t-value
and the t-critical.
trajectory (n=60) Control (n=60)
Mean Variance Mean Variance
0.087 0.007 0.083 0.009
t-value 0.23585
t-critical 1.980
5 CONCLUSION
Nonlinear control is the strategy used to solve the
nonlinearities of the system. Moreover, the system
turned out to be a input output linearizable and with
a proper change of variables the system was trans-
formed into a linear one. Then, linear control strategy
was used for the path following. The Octave-ROS
simulated results have shown that the robot follows
the path and the steering angles are according to the
path trajectory. Furthermore, the two trajectories were
validated by the statistical t-test. In order to continue
with the progress of the automation of the Spider lawn
mower, the intention is to adapt the four independent
steering wheel Andromina model-control to the four
synchronized steering wheel Spider mobile robot. It
is necessary to research further under which condi-
tions the control is unstable or the control is robust. It
is also intended to compare the current control strat-
egy with other optimal control techniques, e.g. fuzzy
control, backstepping among others.
ACKNOWLEDGMENT
This work was supported by the project
IT4Innovations excellence in science, Czech
Ministry of Education, Youth and Sports LQ1602 and
by the project IGA FIT-S-20-6427.
REFERENCES
Adafruit (2016a). Adafruit Motor Shield. Available at https:
//www.adafruit.com/product/1438.
Working Progress towards Lawn Mower Automation
107

Adafruit (2016b). Adafruit Servo Shield. Available at https:
//www.adafruit.com/product/1411.
Andersen, P., Pedersen, S. T., and Dimon, J. (2002). Ro-
bust feedback linearization-based control design for a
wheeled mobile robot. Proc. of the 6th Interna- tional
Symposium on Advanced Vehicle Control.
Andromina (2016a). Andromia OFF-ROAD. Available at
http://androminarobot.blogspot.mx/ p/montaje.html.
Andromina (2016b). Andromina v.1.2. Available at http:
//androminarobot.blogspot.cz/ search/label/ Arduino.
Arduino (2016). Arduino Mega 2560. Available at https:
//www.arduino.cc/ en/ Main/arduinoBoardMega2560.
Bing-Min, S. and Chun-Liang, L. (2008). Design of an au-
tonomous lawn mower with optimal route planning. In
Industrial Technology, 2008. ICIT 2008. IEEE Inter-
national Conference on, pages 1–6, Chengdu. IEEE.
ISBN: 978-1-4244-1705-6.
Bloch, A. M. (2000). Nonholonomic Mechanics and Con-
trol. Addison-Wesley Publishing Company. ISBN:
0-387-95535-6.
Ch
´
avez Plascencia, A. and Dremstrup, K. (2011). Differen-
tial mobile robot based wheelchair. Technical report,
Aalborg University.
Coelho, P. and Nunes, U. N. (2003). Lie algebra application
to mobile robot control: a tutorial. Robotica, 21:483–
493.
Fox, D., Burgard, W., Frank, D., and Thrun, S. (1999).
Monte carlo localization: Efficient position estimation
for mobile robots. In in proc. of the national confer-
ence on artificial intelligence, AAAI, pages 343–349.
Fox, D., Burgard, W., and Thrun, S. (1997). The dynamic
window approach to collision avoidance. Robotics &
Automation Magazine, IEEE, 4(1):23–33.
Franklin, G. F. and Powell, J. D. (1994). Feedback Control
of Dynamic Systems, third edition. Addison-Wesley.
ISBN: 0-201-53487-8.
Goldstain, H. (1980). Nonholonomic Mechanics and Con-
trol. Addison-Wesley. ISBN: 0-201-02918-9.
Guy, C., Georges, B., and Brigitte, D. A.-n. (1996). Struc-
tural properties and classification of kinematic and dy-
namic models of wheeled mobile robots. IEEE Trans-
actions on Robotics and Automation, pages 47–62.
Harwood, P. (2016). Non-linear automatic control of au-
tonomous lawn mower. Master’s thesis, Link
¨
oping
University, SE-581 83 Linkoping, Sweden.
Hokuyo (2009). URG-04LX-UG01. Available at
https://www.hokuyo-aut.jp/02sensor/ 07scanner/
urg 04lx ug01.html.
Khalil, H. (2002). Nonlinear Systems. Prentice Hall. ISBN:
0-13-067389-7.
Krzysztof, K. and Dariusz, P. (2004). Modeling and con-
trol of a 4-wheel skid-steering mobile robot. Interna-
tional Journal of Applied Mathematics Computer Sci-
ence, 14(4):477–496.
Marquez, H. J. (2003). Nonholonomic Control Systems
Analysis and Design. Wiley. ISBN: 0-471-42799-3.
Mathieu, D., Roland, L., Adrian, C., Christophe, C., and
Benoit, T. (2017). Path tracking of a four-wheel steer-
ing mobile robot: A robust off-road parallel steer-
ing strategy. IEEE European Conference on Mobile
Robots (ECMR).
N.Sarkar, N. and R.V.Kumar (1992). Control of mechanical
systems with rolling constraints: Application to dy-
namic control of mobile robots. Technical report, De-
partment of Computer & Information Science (CIS),
University of Pensylvania.
Paulo, C. and Urbano, N. (2005). Path-following control
of mobile robots in presence of uncertainties. IEEE
International Journal of Transactions on Robotics,
21(2):452–261.
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T. B.,
Leibs, J., Wheeler, R., and Ng, A. Y. (2009). ROS: an
open-source robot operating system. In ICRA Work-
shop on Open Source Software.
SKU (2016). DC Motor with Encoder. Avail-
able at https:// www.dfrobot.com/wiki/ index.
php/Micro DC Motor with Encoder-SJ02 SKU:
FIT0450.
Smith, J., Campbell, S., and Morton, J. (2005). Design
and implementation of a control algorithm for an au-
tonomous lawnmower. In Circuits and Systems, 2005.
48th Midwest Symposium on, volume 1, pages 456–
459, Covington, KY. IEEE. ISBN: 0-7803-9197-7.
Spider (2015). Mini, ILD01, ILD02. Available at https:
//www.slope-mower.com/ spider-ild01 p12.html.
Symon, K. R. (1971). Mechanics. Addison-Wesley World
student series. Addison-Wesley Publishing Company.
ISBN: 9780201073928.
Taj, B. M. and Timothy, K. T. C. (2008). Design and mod-
elling a prototype of a robotic lawn mower. In Infor-
mation Technology, 2008. ITSim 2008. International
Symposium on, volume 4, pages 1–5, Kuala Lumpur,
Malaysia. IEEE. ISBN: 978-1-4244-2327-9.
Wasif, M. (2011). Design and implementation of au-
tonomous lawn-mower robot controller. In 7th In-
ternational Conference on Emerging Technologies
(ICET), pages 1–5. IEEE. ISBN: 978-1-4577-0769-
8.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
108
