
Pooling of Heterogeneous Computing Resources: A Novel Approach
based on Multi-Edge-Agent Concept
Florent Carlier
1 a
, Virginie Fresse
2 b
, Jean-Paul Jamont
3 c
, Loic Pallardy
4
and Arnaud Rosay
4 d
1
Centre de Recherche en
´
Education de Nantes and Le Mans University, Le Mans, France
2
Laboratory Hubert Curien UMR CNRS 5516 and University of Jean Monnet, Saint-
´
Etienne, France
3
Laboratory LCIS, Univ. Grenoble Alpes, Grenoble INP, Valence, France
4
STMicroelectronics, Le Mans, France
Keywords:
Architectures for Vehicular, Multi-Agent Systems, Edge Computing Approach, IoT-a, Avatar.
Abstract:
Advanced driving assistance systems are major innovations in vehicles requiring more and more electronic
systems both inside and outside cars and trucks and using vehicle to vehicle and vehicle to infrastructure com-
munications. Electric/Electronic architecture of modern vehicle is based on clustering of Electronic Control
Units (ECU) either by domain or by physical location. Innovation in the field of transportation is often related
to the introduction of new software requiring the addition of hardware. This is a barrier to disseminate innova-
tion in existing vehicles. The most appropriate solution to overcome this problem consists in fully exploiting
under-utilized computing resources rather than adding new ones. In this paper, we propose a novel approach to
manage a pool of resources by introducing the concept of EdgeAgent model. Pooling of resources is managed
by three types of EdgeAgents: Mediator, Allocator and Processor. The resulting system architecture is based
on IoT-a (agents as close as possible to hardware) and Avatar (virtualizing the representation of the hardware
in high level: Cloud and Edge computing). The result of this work enables extension of vehicle management
and functionalities while considering the environment for vehicles of the future.
1 INTRODUCTION
More and more intelligence is integrated inside ve-
hicles to enhance driving safety and increase engine
performance efficiency. The objective of car design-
ers and manufacturers is not only to propose au-
tonomous driving vehicles but also to add new fea-
tures, increasing the level of automation from the
level zero, where humans do the driving, up to level
five through driver assistance technologies up to fully
autonomous cars. Adding more and more features
leads to raise the electronic computing power. The
basic mundane solution is to increase the number of
electronics components to execute these applications.
As an example, Renesas sells hardware and software
platforms to cover the full product range from the pre-
mium class to the entry level. These platforms con-
a
https://orcid.org/0000-0003-0314-3667
b
https://orcid.org/0000-0002-9944-0174
c
https://orcid.org/0000-0002-0268-8182
d
https://orcid.org/0000-0001-5937-5331
tain Systems On Chip (SoC), an integrated circuit in-
tegrating several components on one single substrate
(SA, 2019). This was a viable solution as SoCs con-
sume much less power and take up much less area
than multi-chip designs. Adding SoCs for new fea-
tures was possible in vehicular electronics in the past
but cannot be considered in this way anymore. The
use of lightweight materials within road vehicles has
been considered for many years. Challenges in car
manufacturing are to lightweight the cables, reduc-
ing copper wiring looms by grouping multiple legacy
buses on a single Ethernet backbone, and now to op-
timize electronics to reduce energy consumption and
weight of vehicle. Although the number of electronic
features is set to grow significantly, the actual value of
components should not significantly change. With the
high number of microprocessors and micro-controller
in vehicles, distributing the workloads is the new
challenge. Such challenge requires to propose new
approaches to manage the vehicle electronics in the
present and in the future. Similar approaches have
been already proposed in literature and in industry
Carlier, F., Fresse, V., Jamont, J., Pallardy, L. and Rosay, A.
Pooling of Heterogeneous Computing Resources: A Novel Approach based on Multi-Edge-Agent Concept.
DOI: 10.5220/0008954301850192
In Proceedings of the 12th International Conference on Agents and Artificial Intelligence (ICAART 2020) - Volume 1, pages 185-192
ISBN: 978-989-758-395-7; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
185

for other application contexts. The emergence of the
Cloud Computing, Internet of Things and Edge com-
puting approaches aim at virtualizing, sharing and de-
ploying resources to optimize the workloads and re-
sources usage. The aim of this paper is to propose
a similar approach in vehicle electronics, by predict-
ing the evolution of vehicle architectures and power
requirements from nowadays and future solutions.
The paper is organized as follow. The futuristic
motivating scenario and the predicted vehicle elec-
tronics are presented in section two to extract future
challenges. In a third section, we propose an approach
based on the use of edge agent to carry out mediation
and task allocation on Processing Units. In a next sec-
tion, we describe the system architecture that supports
our approach. It is based in particular on the use of ex-
isting architectures: avatars and IoT-a. In conclusion,
we propose to position ourselves in the context of the
edge. We discuss the limits of the use of avatar and
IoT-a architectures and end our discussion with rec-
ommendations for a new architecture that we wish to
propose in the near future.
2 MOTIVATING SCENARIO
Most actual vehicles integrate a lot of in-vehicle ser-
vices and a small number of out-vehicle services. In-
novative services aim at enabling the car users to
be better informed, be safer, more coordinated with
its surroundings and to offer a smarter use of trans-
port network. Therefore Intelligent Transportation
System and Smart City will be more and more cou-
pled to transform urban mobility. Vehicle-to-Vehicle
(V2V), Vehicle-to-Infrastructure (V2I) and Vehicle-
to-Roadsign (V2R) technologies will be rolled out,
and some services oriented architecture such as which
data filtering and fusion functionalities will be dele-
gated either to the cloud or to external environment.
In-vehicle services will have to consider context-
aware applications. For example, effective infotain-
ment system will use the latest (live) information for
enhanced user experience. The connected car will
serve as a communications hub that will transmit as
well as receives data and information, for diagnosis
and driving assistance system (by reinforcing deep
learning application for example).
The trend toward connected cars will cause dis-
ruption and create new opportunities in areas for Ad-
vanced Driving Assistance System, Advanced Traf-
fic Management System, Advanced Traveler Informa-
tion System, Advanced Vehicle Control System, Ad-
vances Diagnosis and Maintenance System and Ad-
vanced Infotainment System.
Figure 1 depicts one created scenario for future
urban mobility in dense and developed cities. The ve-
hicle is connected to other vehicles and to external
passive and active devices to help the driver.
All these systems interact and are connected to-
gether to offer relevant and appropriate services. For
example, the steering system today interact with the
suspension to ensure a smooth ride and in the future
buildings will interact with the traffic management
system to plan ahead the daily journeys.
The objective of the motivating scenario is to pre-
dict the electronic requirements of the vehicles of the
future from actual electronics. The existing system is
studied to consider the likely evolution of the system
according to the predicted advanced system presented
in the scenario.
Electronics in vehicle typically contains 100-300
micro-controllers or processors, 50 more complex
Electronic Control Units (ECU). In general terms, we
will talk about processing units (PU) distributed in the
vehicle. Two representations co-exist for the grouping
of these units in modern vehicles.
• Feature groups: the vehicle is composed of Do-
main Controller Units (DCU) with similar func-
tionalities (ex: ADAS, Chassis, Body, etc.). This
simplifies the manufacture and design of cars.
• Physical location: functionalities from the same
location area are grouped together to form a Zone
Controller Unit (ZCU) (ex: front left and right,
rear left and right, center, etc.). The goal is to
reduce wiring in cars.
In all cases, the DCUs and ZCUs are in the
vehicle-specific area managed privately by the Gate-
way. The role of the gateway is to isolate vehicle
control from external access to information. Thus the
blocks of communication (Inter-Vehicular, Vehicule-
to-Road, Infotainment) will have access to the Telem-
atic Control Unit (TCU) to communicate with the en-
vironment without being able to influence the safety
and security of the vehicle. The communication be-
tween the different blocks (DCU and ZCU) are made
by an Ethernet link in order to gain speed and band-
width. Figure 2 shows the two architectures (Feature
Group with DCU or Physical localization with ZCU)
in a modern vehicle.
Number of processing units (PU) is more and
more increasing in the vehicle and will continue to
increase in the future. These PUs will also communi-
cate together inside the vehicle and in its surrounding.
It is therefore necessary to propose a new approach
to optimize this number of PUs and their workloads.
Our approach is to be able to share our local comput-
ing resources in order to add new functionalities to
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
186
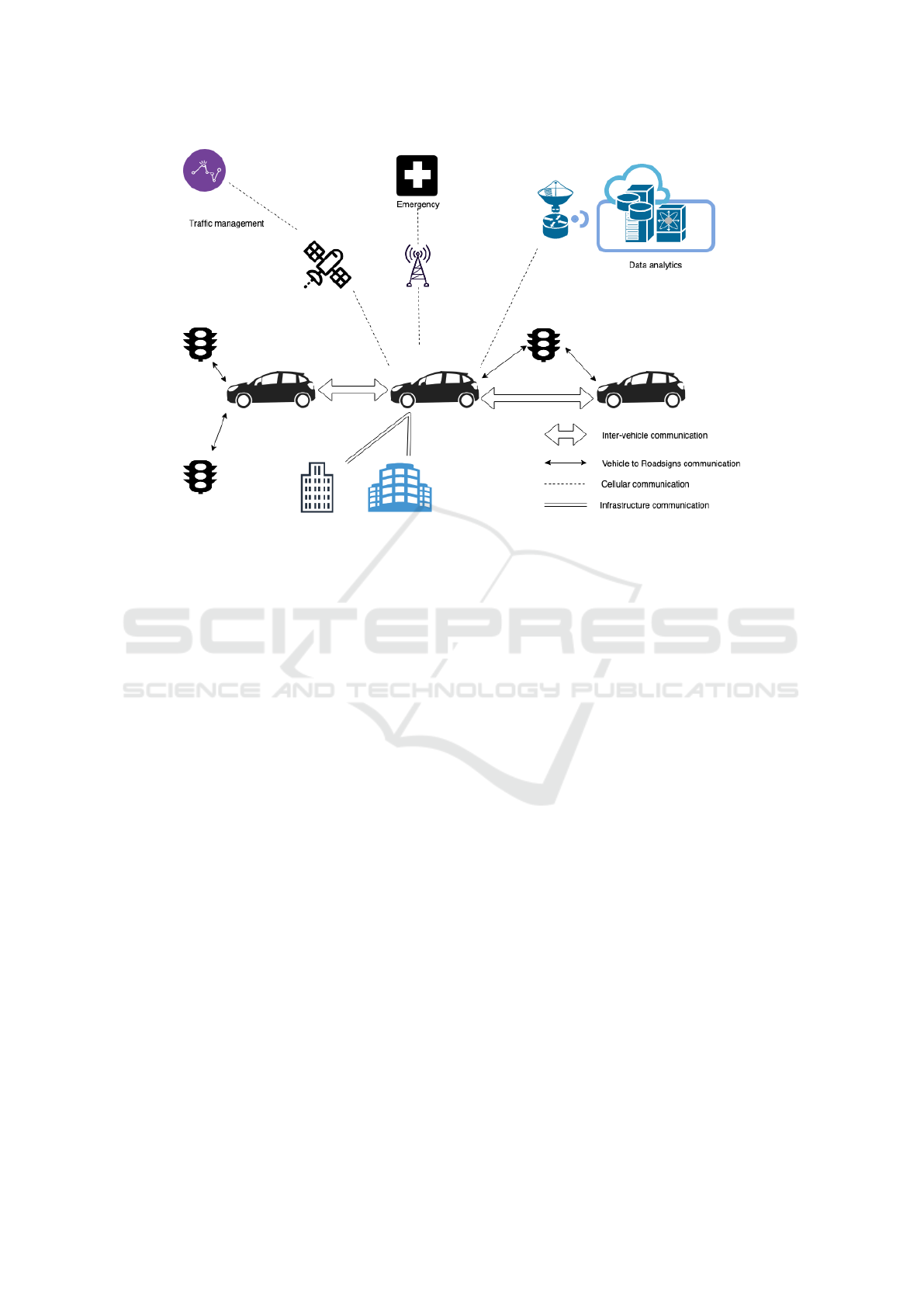
Figure 1: Illustration of a scenario with modern vehicle interactions.
the vehicle without having to redeploy PUs in DCUs
or ZCUs. The use of edge computing is a new method
to perform new tasks. In case you want to keep the lo-
cal computing capabilities, it is possible to maintain a
link to the cloud. This way of thinking allows us to
work independently the availability of resources and
thus make task delegation to other environments.
In the next section, we present these infrastruc-
tures and detail how they cope with EdgeAgent
model.
3 A MULTIAGENT APPROACH
BASED ON EDGE AGENTS
3.1 Motivation for a Multi-Agent
Approach
The motivation is the design of the future electronics
platform enabling to compose the capacities of dif-
ferent resources (PUs) into services making sense for
vehicle designers and users. Such platform requires
to meet different challenges:
• discoverability (C1): allow to discover heteroge-
neous resources, to be able to plug and unplug re-
sources to the platform;
• connectivity (C2): take into account several
communication models (request/response, event-
based, publish/subscribe, etc.) in order to allow
applications to interact with various resources, as
well as support connectivity disruptions for mo-
bile wireless connected resources;
• reactivity (C3): adapt its structure and behavior
to its environment and any potential changes at
runtime;
• safety (C4): be reliable and secure so that re-
sources and applications are harmless and avoid
privacy issues;
• interoperability (C5): allow any applications to
run across heterogeneous resources, so that users
can seamlessly interact with resources;
• delegation (C6): identify the most suitable loca-
tion to execute each code module and deploy these
modules on the resources processing unit or on
any external infrastructure (V2V, V2I, V2R), in-
stead of completely delegating computation tasks
to cloud-based infrastructures;
• scalability (C7): cope with high numbers of re-
sources, heavy calculation processes and/or high
quantities of data;
• collaboration (C8): allow a set of resources to
exhibit a collective behavior to achieve complex
functionalities;
• usability (C9): provide high-level services, so that
applications match vehicle-users’needs.
These constraints require decoupling decision-
making as much as possible the nodes that make up
the system. In other words, this point militates in
favour of giving them autonomous decision-making.
Pooling of Heterogeneous Computing Resources: A Novel Approach based on Multi-Edge-Agent Concept
187
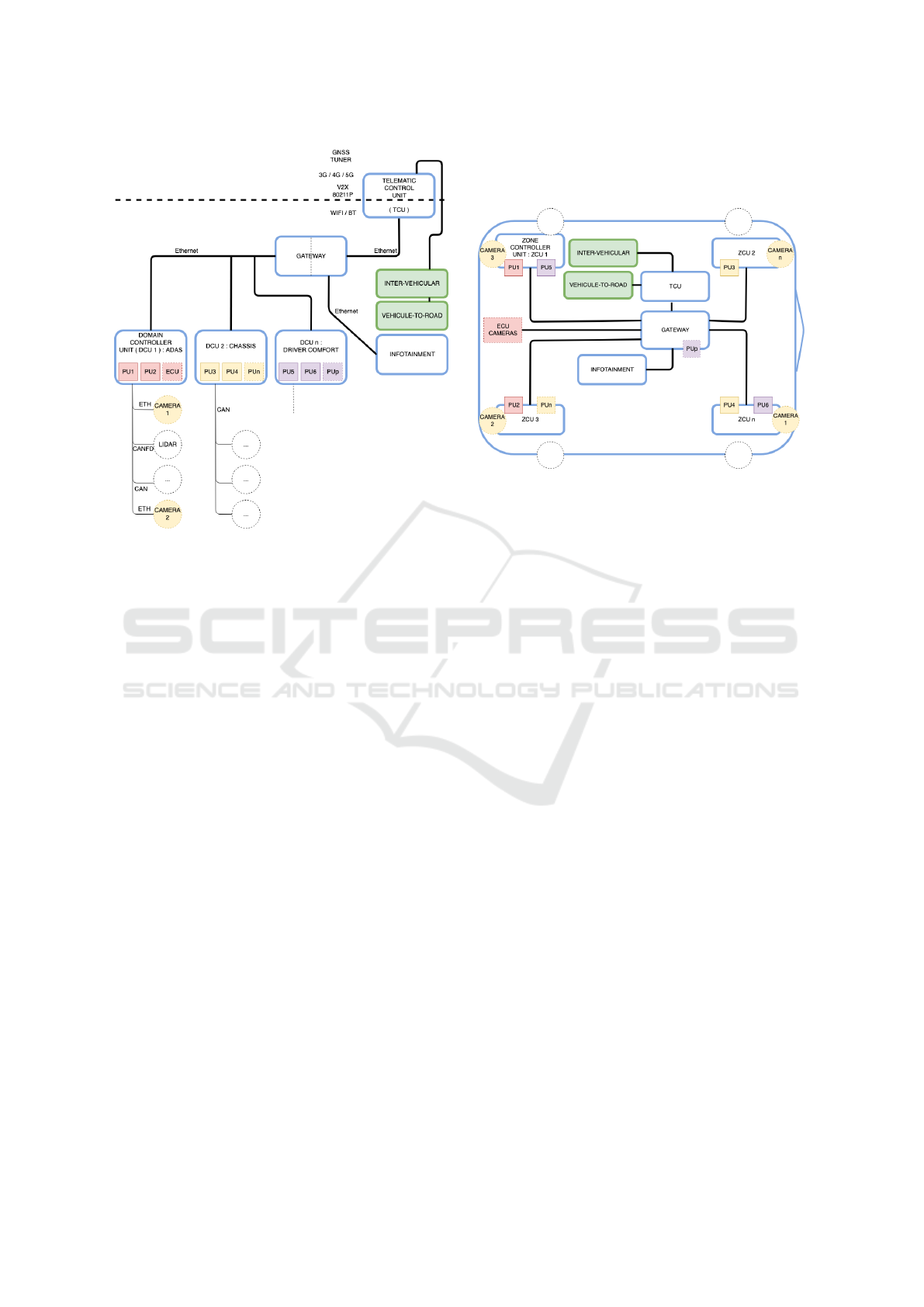
Figure 2: Modern Vehicular Architectures with ECU repartition, Left: Feature groups, Right: Physical localisation.
The corollary is that the overall decision-making
process of the system is decentralized. The cloud-
based model actually used for vehicle electronics,
Figure 3 (Left) cannot cope to the previously pre-
sented challenges as resources are centralized. It
is necessary for these resources to cooperate and
theses resources do not need to have all knowledge
and skills to meet their individual (local level) and
collective (global system level) objectives. Putting
in cooperation autonomous agent systems is at the
heart of multiagent paradigm. In our context, Edge
computing can leverage computing resources that
cannot be all connected, as depicted in Figure 3
(Right).
3.2 Proposed Approach
In the vehicle approach, the execution of algorithms
on electronic vehicle must consider:
• Algorithms that can be deployed in the cloud for
execution,
• Algorithms that cannot be deployed in the cloud
and must be executed inside the vehicle,
• Algorithms and tasks that can be executed on any
ZCU or DCUs as long as the target PUs contains
the code/architecture,
• Algorithms and tasks that must be executed on a
specific ZCU or DCU for safety, security reasons
or for any other hardware constraints.
Sharing resources for future electronic vehicle
must consider that each algorithm may have some ex-
ecution and allocation constraints and the electronic
platform must consider all of them. Resources shar-
ing requires a model to supervise all resources, evalu-
ate the workloads and allocate the functions according
to the available resources. The proposed model is an
EdgeAgent model with three types of EdgeAgent, as
depicted in Figure 4:
• EdgeAgent Mediator: receives all requirements
and looks for the appropriate and available re-
sources in each ZCU and DCU to negotiate which
resources will be used,
• EdgeAgent Allocator: knows the states of each
PUs and allocate the tasks,
• EdgeAgent Processor: supervises the execution of
the functions on the target PU.
In this model, the EdgeAgent Mediator has a global
overview of the state and availability of each re-
source at any time. The EdgeAgent Mediator al-
locates functions to resources after EdgeAgent Al-
locator exchanges. For example, when the park-
ing assistance system is on, the associated algorithm
must be executed inside the vehicle on any resources.
The EdgeAgent Mediator is looking for available re-
sources and requests the EdgeAgent Allocators to
know what resources are available. The EdgeAgent
Mediator decides for example as resources in DCU1
will be used and the EdgeAgent Allocator associated
to DCU allocates the functions to DCU1 resources.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
188
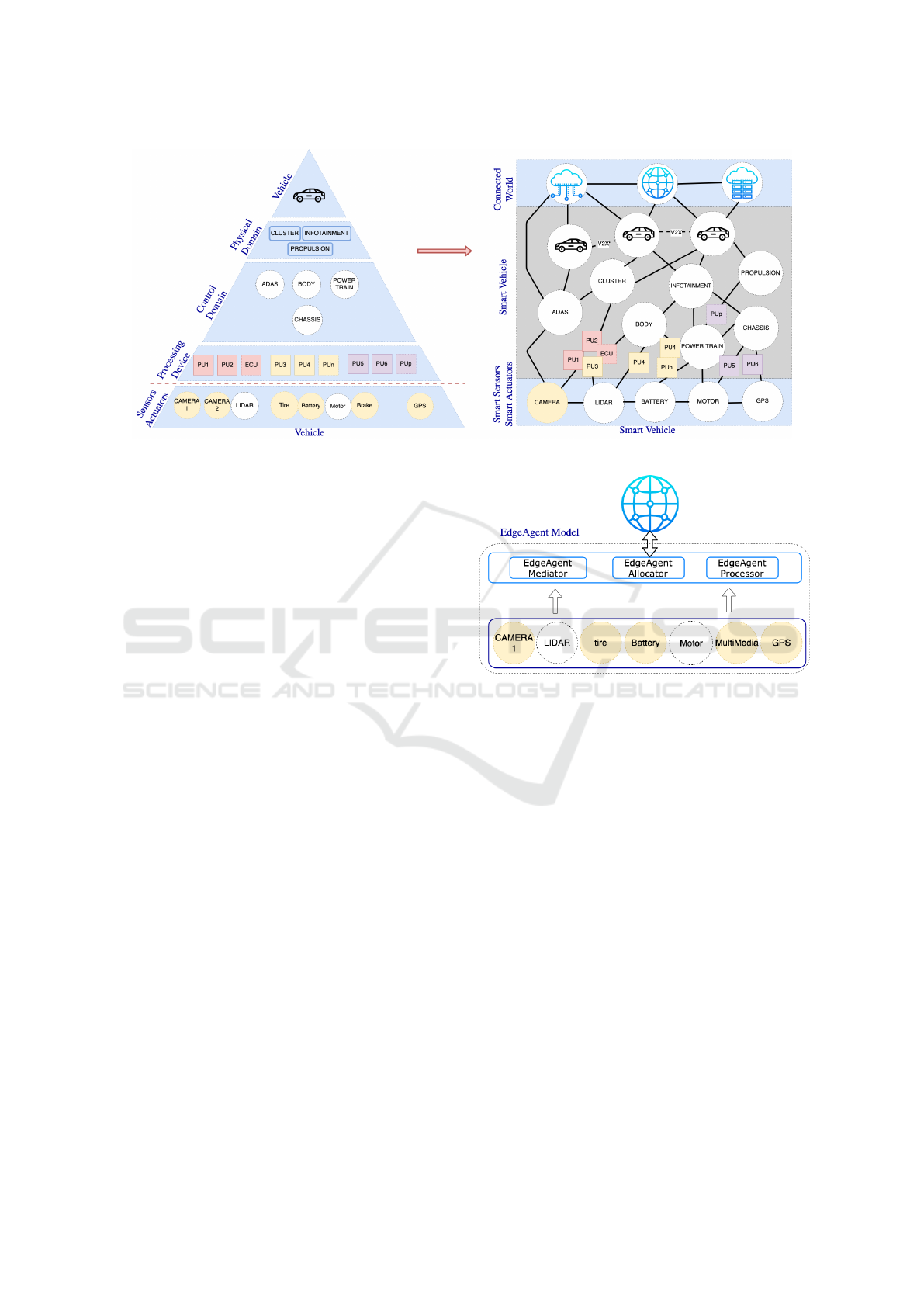
Figure 3: Vehicule evolution with the Edge Computing.
The EdgeAgent Allocator has a constant and precise
view of the state of the resources it is in charge.
The EdgeAgent Mediator has a global view of all
resources of the system whereas the EdgeAgent Al-
locator knows precisely the states of the associated
resources. The EdgeAgent Allocators communicate
with the EdgeAgent Mediator so it can decide how
and where to execute the functions. The role of the
EdgeAgent Processor is to supervise the execution of
the functions after deployment by the EdgeAgent Me-
diator and Allocator. These three types of EdgeAgent
will be put in the Edge to manage resources accord-
ing to services, algorithms and hardware and software
requirements. The number and localization of these
Agents depend on the electronics systems and their
role inside the Edge. First assumption can be done:
• The EdgeAgent Mediator has a global overview of
resources and zones and should be in the gateway
level,
• The EdgeAgent Allocator has a precise overview
of the states of its resources and can be in the gate-
way level or in the zone level,
• Several EdgeAgent Allocator exchange with an
EdgeAgent Mediator,
• EdgeAgent Allocators communicate to
EdgeAgent Processors,
• The EdgeAgent Processor should be near re-
sources, the closeness depending on the PUs man-
agement,
• EdgeAgent Allocator makes the link between
EdgeAgent Mediator and EdgeAgent Processor.
Figure 4: EdgeAgent model.
4 SYSTEM ARCHITECTURE
Embedded systems (ES) are defined as information
processing systems integrated into dedicated products
(Marwedel, 2018). In our context, ES contains PUs
inside the vehicle and PUs outside the vehicle. The
purpose of ES is to respond autonomously (in cal-
culation, energy and memory) to a specific services.
Lee (Lee, 2007) advances the notion of Cyber Phys-
ical Systems (CPS) and defines it as an embedded
system to which is added the ability to capture in-
formation and/or act on its external environment. As
CPSs are now able to communicate their results to
each other, they become connected objects (Cervantes
et al., 2018). We identify three types of physical ob-
jects:
• Complex Objects: These objects provide software
services and dedicated communications that of-
fers service interfaces. It is then often trivial to
link these objects together or with other software
services.
Pooling of Heterogeneous Computing Resources: A Novel Approach based on Multi-Edge-Agent Concept
189

• Lightweight Objects: These objects cannot embed
servers due to restricted computing capacity but it
is often easy to link them to proxies. A proxy can
embed a Web server. The (object, proxy) couple
can be seen as a complex object that is physically
distributed.
• Bare Objects : These objects are passive objects
that can be detected. Passive objects receive data
When such an object is in the range of a RFID
reader, the reader receives a byte array. A logical
link can then be established between the physical
object and the byte array.
We propose two different types of agent archi-
tecture to embody the EdgeAgent: avatars will
allow the most powerful implementation (to ad-
dress strong requirements Ci) while IoT-A agents
will be the most economical in terms of en-
ergy/memory/CPU/bandwith consumption. An IoT-A
agent system can be abstracted by an avatar agent.
4.1 IoT-a Model
In previous works (Carlier and Renault, 2016; Re-
nault and Carlier, 2016), we propose the concept of
IoT-a for Internet of Things-agent. Objects are con-
nected and interact on the basis of a common lan-
guage. The diversity of architectures requires an
agent integration model capable of adapting to differ-
ent hardware levels.
According to the IoT-a model (Figure 5), we pro-
pose four main detailed configurations for the imple-
mentation of agents within an IoT or PU. These con-
figurations, respecting the constraints Ci (Ref. 3.1),
can be combined because they are independent. The
more complex an IoT or PU is, the more it can inte-
grate different agent configurations.
The configuration 1 proposes the integration of an
agent at the hardware level. This first configuration is
applicable to connected objects that can be based on a
hardware architecture such as microcontrollers or an
ASIC (Skhiri et al., 2017). The component integrates
a material agent into the silicon and becomes an addi-
tional and autonomous function.
In the configuration 2 an agent is present in addi-
tion to the global software system (e.g. operating sys-
tem). From this configuration, it is assumed that the
system has sufficient hardware resources to host an
operating system. This second configuration can be
implemented on IoTs based on architectures such as
ARM, PowerPC or x86 (STMicroelectronics, Broad-
com, Intel, etc.). This is the first all-software config-
uration but it is as close as possible to the hardware
and does not suffer the latency of an operating sys-
tem. The execution of agents has the possibility to be
CPSConfiguration2
EmbeddedSystem PhysicsAgent(s)
CPSConfiguration3
EmbeddedSystem PhysicsAgent(s)
CPSConfiguration1
EmbeddedSystem Physics Agent(s)
CPSConfiguration4
EmbeddedSystem PhysicsMAS
IoTaModel
Figure 5: IoT-a traditional model.
real time and/or secure.
The configuration 3 allows the integration of one
or more agents into the software system. Agents are
present either in the software kernel to take into ac-
count low-level or real-time events, or in the user
space to respond to more complex problems that can
be multitasking. These agents, like those mentioned
in the first two configurations, are autonomous and
require a multi-agent platform to exchange with other
agents present on different connected objects.
Finally, configuration 4 proposes that the PU host
a complete multi-agent platform. The agents present
in the object can interact autonomously and can be in
large numbers.
The platform serves as a relay for agents and/or
MASs distributed on other types of hardware config-
uration (or hybrid configuration) or other connected
objects in its network. This configuration requires a
Processing Unit with sufficient hardware resources to
run multiple agents and support different communica-
tion protocols at different hardware levels.
4.2 Avatar Model
An avatar is a virtual representation on the Cloud ex-
tending objects (Jamont and Occello, 2015; Jamont
et al., 2014; Mrissa et al., 2015) (Figure 6). Build-
ing this type of platform generally relies on proxy (a
projection of a physical object into the Web). Con-
cretely, it is a Web intermediary for requests from
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
190
clients seeking resources from other objects. Avatars
are not simple proxies. An avatar is an autonomous
entity (i.e. an agent). The increase of its knowledge
and its skills comes from (1) the Web which is the
avatar environment (so an avatar can access to the
Web of data and Web Service) and (2) others avatars.
Through their avatars, Cyber Physical Systems can be
in interaction and particularly in cooperation.
CyberPhysicalSystem(CPS)
EmbeddedSystem Physics
AvatarModel
Avatar
Avatar Avatar
CyberPhysicalSystem(CPS)
EmbeddedSystem Physics
Figure 6: Avatar model.
Some components of the avatar architecture are
dedicated to thing control and others implement the
autonomous, self-adaptive and collaborative behavior
of avatars. The physical setup is decoupled from its
logical architecture: an avatar can dynamically adapt.
The avatar components are divided into 8 functional
modules:
• the Core Module includes components that are
used in several steps of the avatar lifecycle. Each
avatar embeds a Reasoner, used by other com-
ponents to process semantic information pertain-
ing on the capabilities, functionalities and context.
So is the Local Cache, that stores semantic infor-
mation from diverse sources (thing, repositories,
external context) and reflects the current state of
the avatar. In particular, the cache loads concepts
from the semantic repositories, in order to make
them available to other modules through the rea-
soner. This module is essential to address the mul-
tiple concerns targeted by the application through
the avatar, while avoiding allocating unnecessary
resources. It participates in addressing most of the
requirements, and especially (C6).
• the Interoperability module provides the other
avatar modules with a uniform interface to inter-
act with the resources it is attached to (C1, C5).
This interface consists of a set of capabilities that
represent the thing API. It loads drivers from a
platform repository and uses them to identify the
communication schemes understood by the thing;
eventually, it uploads onto the thing the appropri-
ate configuration.
• the Filtering module restricts functionality expo-
sition and data exchanges according to privacy or
security issues, some functionalities should not be
achieved by the avatar, they will be filtered by
the Privacy manager. The Context Manager has
a more complex role.
• the Communication module ensures reliable com-
munication with the resources. It selects the ap-
propriate network interface and protocols accord-
ing to communication purposes and performance
needs (C4).
• the Web service module allows avatars to com-
municate with other avatars and with the external
world.
• the Local Functionality module handles high-
level functionalities achievable using the resource
capabilities (C9). It relies on semantic tech-
nologies to map the resource layer (capabilities)
with the application layer (functionalities) in a
declarative and loosely coupled manner, ensur-
ing application interoperability with various re-
sources (Mrissa et al., 2014) (C5).
• the Collaboration module handles functionalities
that require collaboration between several avatars
(Cervantes et al., 2018) (C8).
• the WoT Application module provides and con-
trols ”Web of Things (WoT) application contain-
ers” that execute code modules implementing the
different aspects of a WoT application (C9). Such
containers can be replicated on the resource, on
the gateway and on the cloud infrastructure thanks
to the deployment manager, so that modules are
executed on the appropriate location (C6).
5 CONCLUSION
Through this article, we provide a new approach
(EdgeAgent) of allocating task (Inguere et al., 2016)
for PUs in a modern vehicle. Contrarily to our both
separate initial model (IoT-a and Avatar), we pro-
pose a better flexibility to manage a computational
resources. Now, depending on the complexity of the
PU, we can choose IoT-a model for objects with com-
putation resources or Avatar model for simple objects.
In the vehicle, the minimization of cables leads the
OEM to group the PUs by local area (ZCU) and not by
functionality category (DCU). ZCUs are connected
Pooling of Heterogeneous Computing Resources: A Novel Approach based on Multi-Edge-Agent Concept
191

by Ethernet cable to the gateway to increase the trans-
fer rate and reactivity. We can pre-process data locally
and provide new functionalities for data manipulation
using the edge computing principle. In the Figure 3,
the network approach is migrating from a pyramidal
to a cubic architecture. The introduction of the con-
cept of edge computing leads us to take the lead in
delegating tasks locally in the vehicle. The generic
tasks can now be executed on a different PU than the
one assigned by default. In the event that the func-
tionality cannot be achieved locally, we send the data
to the cloud for cluster server processing.
Following of our work, we will investigate the
possibility to extend our negotiation procedure to
other cubic edge, allowing by the way a resource
sharing between different hardware units. The STMi-
croelectronics also produces vehicular embedded sys-
tems. Later, we wish to distribute our agents on these
various units to delegate tasks between these different
resources (to vehicle, to road, to smart city).
REFERENCES
Carlier, F. and Renault, V. (2016). Iot-a, embedded agents
for smart internet of things: Application on a display
wall. In 2016 IEEE/WIC/ACM Int Conf. on Web Intel-
ligence, The First Int. Work. on the Internet of Agents,
pages 80–83. IEEE Computer Society.
Cervantes, F., Ramos, F., Guti
´
errez, L., Occello, M., and Ja-
mont, J. (2018). A new approach for the composition
of adaptive pervasive systems. IEEE Systems Journal,
12(2):1709–1721.
Inguere, T., Carlier, F., and Renault, V. (2016). Flexible
image processing in embedded systems using multi-
agents systems. In 14th IFAC/IEEE Int. Conf. on Pro-
grammable Devices and Embedded Systems (PDeS
2016), pages 164–169.
Jamont, J., M
´
edini, L., and Mrissa, M. (2014). A web-based
agent-oriented approach to address heterogeneity in
cooperative embedded systems. In Int. Conf. on Prac-
tical Applications of Agents and Multi-Agent Systems,
pages 45–52.
Jamont, J. and Occello, M. (2015). Meeting the chal-
lenges of decentralised embedded applications using
multi-agent systems. International Journal of Agent-
Oriented Software Engineering, 5(1):22–68.
Lee, E. A. (2007). Computing foundations and practice for
cyber-physical systems: A preliminary report. Techni-
cal Report UCB/EECS-2007-72, EECS Department,
University of California, Berkeley.
Marwedel, P. (2018). Embedded System Design: Embedded
Systems Foundations of Cyber-Physical Systems and
the Internet of Things. Springer Publishing Company,
Incorporated, 3rd edition.
Mrissa, M., M
´
edini, L., and Jamont, J. (2014). Semantic
discovery and invocation of functionalities for the web
of things. In IEEE int. conf. on enabling technologies:
infrastructure for collaborative enterprises.
Mrissa, M., M
´
edini, L., Jamont, J., Sommer, N. L., and
Laplace, J. (2015). An avatar architecture for the web
of things. IEEE Internet Computing, 19(2):30–38.
Renault, V. and Carlier, F. (2016). Triskell3S, une plate-
forme embarqu
´
ee multi-agents pour les IoT-a. In
Journ
´
ees Francophones sur les Syst
`
emes Multi-Agents
(JFSMA 2016), pages 181–190.
SA, R. (2019). Automotive System-on-Chip (SoC).
https://www.renesas.com/us/en/solutions/automotive/
soc.html.
Skhiri, R., Fresse, V., Jamont, J., and Suffran, B. (2017).
Challenges of virtualization fpga in a cloud context.
IEEE Int. Conf. on Computational Intelligence and
Virtual Environments for Measurement Systems and
Applications.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
192
