
High-performance Algorithms using Deep Learning in Turn-based
Strategy Games
Tomihiro Kimura and Ikeda Kokolo
Japan Advanced Institute of Science and Technology, JAIST, Ishikawa, Japan
Keywords:
Turn-based Strategy Games, Deep Neural Network, Deep Reinforcement Learning, Policy Network, Value
Network, AlphaZero, Residual Network.
Abstract:
The development of AlphaGo has increased the interest of researchers in applying deep learning and reinforce-
ment learning to games. However, using the AlphaZero algorithm on games with complex data structures and
vast search space, such as turn-based strategy games, has some technical challenges. The problem involves
performing complex data representations with neural networks, which results in a very long learning time.
This study discusses methods that can accelerate the learning of neural networks by solving the problem of
the data representation of neural networks using a search tree. The proposed algorithm performs better than
existing methods such as the Monte Carlo Tree Search (MCTS). The automatic generation of learning data by
self-play does not require a big learning database beforehand. Moreover, the algorithm also shows excellent
match results with a win rate of more than 85% against the conventional algorithms in the new map which is
not used for learning.
1 INTRODUCTION
Games such as Chess, Shogi (Japanese Chess), and
Go have long been used as test cases in artificial intel-
ligence (AI) research. Currently, AI agents for Chess
and Shogi have been developed that can perform be-
yond the professional level of humans. In contrast,
it was initially thought that making an AI with pro-
fessional Go player-level agents is difficult; however,
in 2016, AlphaGo (Silver et al., 2016) was released,
which is the first program to beat professional Go
players at full board size without a handicap. Fol-
lowing the success of AlphaGo, DeepMind released
AlphaGoZero in 2017 (Silver et al., 2017), which is
and improvement of AlphaGo by not requiring data
to be learned from previous games. Instead, AlphaGo
Zero learns by only playing against itself making it
stronger than all previous versions. That same year,
AlphaZero, a general-purpose version of AlphaGo
Zero (Silver et al., 2018), was released, that masters
the games of Chess, Shogi, and Go. Since then, the
development and research of game AI that incorpo-
rates deep learning and reinforcement learning have
been popular.
Turn-based strategy and war simulation games
have been popular in the board and video game mar-
ket. However, AI programs for turn-based strategy
games have not been able to satisfy the level of human
players, because of the following two reasons.
Firstly, turn-based strategy games have a vast
search space, which is larger than Go or Shogi.
Hence, even the first turn could lead to a compu-
tational explosion. Secondly, the complexity of the
game system makes programming difficult. These
problems are caused by a variety of factors that make
gaming systems complex and engaging.
One of the factors that complicate games is the
variety of pieces and the various characteristics of to-
pographicelements; these pieces and topographic fea-
tures do not exist in Go or Shogi. Moreover, the initial
layout of the map is not fixed as in Go and Shogi, and
a wide variety of maps can be designed in many cases.
Furthermore, in turn-based strategy games, all
units can sequentially operate during a turn, providing
more options and making this condition more suscep-
tible to computational explosions.
In addition, board game researchers who study
Go, Chess, and Shogi have accumulated game data
through many years of research, which is not the
case for most turn-based strategy games; hence, re-
searchers have to gather the data themselves if neces-
sary.
Deep learning, which is used in AlphaGo, is be-
coming very popular and is expected to be used as a
Kimura, T. and Kokolo, I.
High-performance Algorithms using Deep Learning in Turn-based Strategy Games.
DOI: 10.5220/0008956105550562
In Proceedings of the 12th International Conference on Agents and Artificial Intelligence (ICAART 2020) - Volume 2, pages 555-562
ISBN: 978-989-758-395-7; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
555
search technique for games with huge search spaces
far more complex than Go and Shogi. AlphaZero’s
algorithm, although called MCTS, is quite different
from the traditional MCTS algorithm. AlphaZero
uses the probabilistic output of the policy network as
a guide for proceeding with the search. It is consid-
ered to be general and can be applied in cases where
the original MCTS algorithm is applicable. Hence, it
would be interesting to evaluate the performance of
AlphaZero’s algorithm on other games.
In this paper, we evaluate the performance of Al-
phaZero’s algorithm in terms of the difficulty and in-
genuity in applying it to complex games and of its
ability to accelerate learning.
The original name of the algorithm is APV-MCTS
(Asynchronous Policy and Value MCTS). We modify
it here by removing the element A; hence, our algo-
rithm is called PV-MCTS.
2 TUBSTAP
To address the difficulties stated above, we use the
Turn-Based Strategy Games as an Academic Platform
(TUBSTAP) (Fujiki et al., 2015), which allows the
development and comparisons of the performance of
turn-based strategy game AI agents. The game rules
are examined, extracted, simplified, and abstracted
from the rules of various turn-based strategies such
as “Famicon Wars”. Hence, the basic operation of the
turn-based strategy game can be investigated on this
platform.
2.1 TUBSTAP Game Rules
The following units are available in TUBSTAP: In-
fantry, Panzer, Cannon, Anti-air Tank, Fighter planes,
and Attack Aircraft. In addtion, six types of terrain
cells are available: mountain, forest, plain, road, sea,
and fortress. All units have an initial hit point (HP),
which is an integer between one and ten such that the
unit is, removed from the board when it reaches an
HP of 0. The HP decreases when units attack; simul-
taneously, the HP of the attacking side unit decreases
during a counterattack. TUBSTAP is similar to “Fam-
icom Wars”. The game progresses by having fighting
RED and BLUE forces fight each other with multi-
unit movements in one turn. The match ends when
either units are completely destroyed, or the specified
number of turns is reached. The winning side is the
one that destroys the other unit or has a higher total
HP above a threshold value specified at the end of the
game.
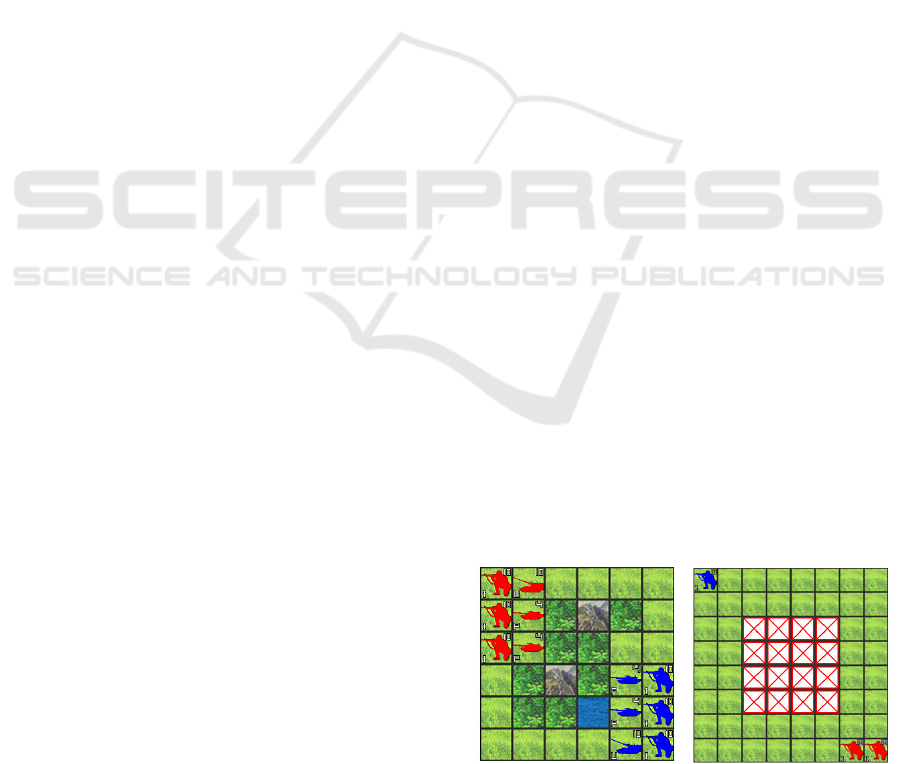
2.2 TUBSTAP Game Maps
TUBSTAP users can create and test a wide variety of
maps. Figure 1 (a) shows an example of a battle map
in TUBSTAP, which is used in game competitions and
AI combat capability. Although the map size is rela-
tively small, i.e., 6 × 6, current AI programs used on
this map still have difficulties in selecting the optimal
operation. In fact, there are no algorithms that can
perform better than the level of humans except for the
MCTS-type algorithms, which has been found to per-
form satisfactorily. On this map, it is difficult for an
AI program to always select the optimum operation,
and sometimes it selects the operation which is very
disadvantageous. There is no algorithm beyond hu-
man action. Among the game algorithms, the MCTS
type algorithm is the only one that seems to be able to
operate competitively.
We prepared a collection of benchmark problems
(Kimura and Ikeda, 2016) in AI research, including
pathfinding problems, tracking problems, and multi-
unit cooperation problems, with varying levels of dif-
ficulty. Figure 1 (b) shows an example of bench-
mark maps, representing the pinch problem (sand-
wich problem). In the pinch problem map, the search
algorithm has to search deep and wide ranges to ob-
tain the right answer, which is difficult to read accu-
rately.
Considering reasonable learning time and execu-
tion time, the map size is set to 6 × 6, and all evalua-
tions are made on maps of this size.
2.3 Previous Works
The algorithms applicable to TUBSTAP are limited
by the computational complexity of turn-based strat-
egy games. Although MCTS and its variations (Kato
et al., 2013) and the minimax method, which divides
the aspects (Sato et al., 2015; Sato and Ikeda, 2016),
have been found to be applicable, the obtained perfor-
mance is still poor. A recent study has applied, deep
learning to TUBSTAP (Kimura and Ikeda, 2019),
(a) Battle map example.
(b) Pinch problem map.
Figure 1: TUBSTAP Map Examples.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
556
which learns a large number of match records to cre-
ate a policy network; however, it does not have a
search method. In relation to this, a recent study de-
veloped a search method that combines a policy net-
work and the value network introduced in AlphaZero
(Kimura, 2019); however, detailed technical data and
analyses are insufficient. This paper will provide a
more detailed technical analysis of the scheme.
3 PROPOSED SYSTEM
The basic principles of the proposed system follow
the AlphaZero’s system but with changes incorpo-
rated for TUBSTAP. The changes include a function
for multi-unit operations, an additional operation for
searching attack nodes with priority, and a neural net-
work with improved performance. The proposed sys-
tem consists of a tree search part, a reinforcement
learning part, and a neural network part.
In the learning part, data are generated by the
search of PV-MCTS. In the normal game play phase,
the final next move is decided by the search based on
the prediction of the learned neural network.
3.1 New Design Part
Many parts of this research are added to the Alp-
haZero design. To solve the complex data structure
problem of the turn-based strategy game, change the
output structure of the neural network and move the
unit designation from output to input. We try to sim-
plify complex games by incorporating a structure for
selecting multiple units into the search tree. To speed
up node selection in the MCTS, we introduce a bias
term to make the search efficient. Introducing new
knowledge to change the design of neural networks,
aiming for a design that converges faster.
3.2 Tree Search Design
The PV-MCTS search is an MCTS-type search that
uses deep neural networks with both policies and val-
ues. The search proceeds based on the probability
distribution vector p output of the policy network and
node selection by simulation. The node with the high-
est visit count is selected. Note that search does not
use the rollouts commonly used in MCTS. During
self-play, the node is reused for the next search.
In simple TUBSTAP output representation, unit
selection and action should be in the output, but in this
study, the unit selection is placed on the input side and
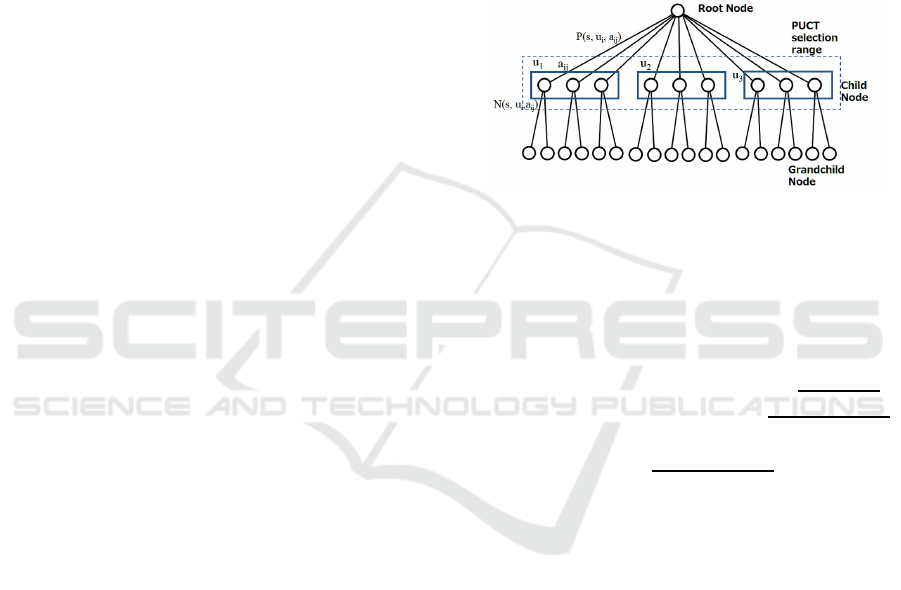
included in the tree search. Figure 2 shows that the se-
lection of units is performed simultaneously by node
selection using predictor upper confidence bound ap-
plied to trees (PUCT) (Silver et al., 2017; Rosin,
2011) values. When the number of units is one, the
algorithm is the same as the usual PUCT search. We
assume that the action a
i, j
is a pointer for each unit
u
i
of TUBSTAP, and the aspect represented by each
node transits to the aspect of the next node through
the edge a
i, j
. Child nodes are expanded individually
for each u
i
as shown in the boxed area in Figure 2, and
unit selection information is included in the selected
node. If there are n units on the map, the search is
performed n times and all units are selected.
Figure 2: Node selection range.
To select a node to search: For all possible action
nodes of the unit, calculate the PUCT value according
to the following formula and select the node with the
largest PUCT value.
PUCT(s,u
i
,a
ij
) =Q(s,u
i
,a
ij
)+
CpuctP(s,u
i
,a
ij
)
p
∑
b
N(s,b)
1+ N(s,u
i
,a
ij
)
+
B
attack
1+ N(s,u
i
,a
ij
)
(1)
a
i, j
, u
i
= argmax
a,u
(PUCT(s,u
i
,a
ij
)) (2)
Here, Q(s,u
i
,a
ij
) is the mean action value, Cpuct
is an exploration constant set to 0.8, P(s,u
i
,a
ij
) is
the prior probability, N(s,u
i
,a
ij
) is the visit count of
node, and B
attack
is a newly introduced term for ac-
celerating learning, experimentally determined to be
3.7, which is used so that attack nodes are searched
preferentially. The B
attack
term operates during both
learning and normal operation. The effect of this term
will be compared later in the experiment.
Dirichlet noise for a wide range search is added
but only to the root node of the search tree. A Boltz-
mann probability selection with temperature decay is
carried out in deciding the move for self-play.
The information stored in each node includes the
number of visits N, the selection probability P, the to-
tal value W, the average value Q, value network out-
put v, and the links to the child nodes of the node.
High-performance Algorithms using Deep Learning in Turn-based Strategy Games
557
After the search reaches the game end, the number
of visits and the value are updated by N(s
t
,a
t
) =
N(s
t
,a
t
) + 1, W(s
t
,a
t
) = W(s
t
,a
t
) + v, Q(s
t
,a
t
) =
W(s
t
,a
t
)
N(s
t
,a
t
)
. The node with the most visits in the last stage
of the search becomes the next move.
3.3 Reinforcement Learning Design
Self-plays start from various initial maps and continue
through PV-MCTS until the game state reaches a ter-
minal node. The game state s and the probability dis-
tribution π obtained by the tree search and the value v
by the game result z are stored in the replay memory
(Mnih et al., 2015), and the neural network is peri-
odically learned. Note that z = 1 if the game is won,
z = −1 if the game is lost, and z = 0 if the game is
a draw. Based on randomly sampled data from the
accumulated reply memory, learning is performed to
minimize the loss function by a gradient method as
described later. To enrich data and prevent bias in the
neural network, rotation, and mirror data augmenta-
tion are performed.
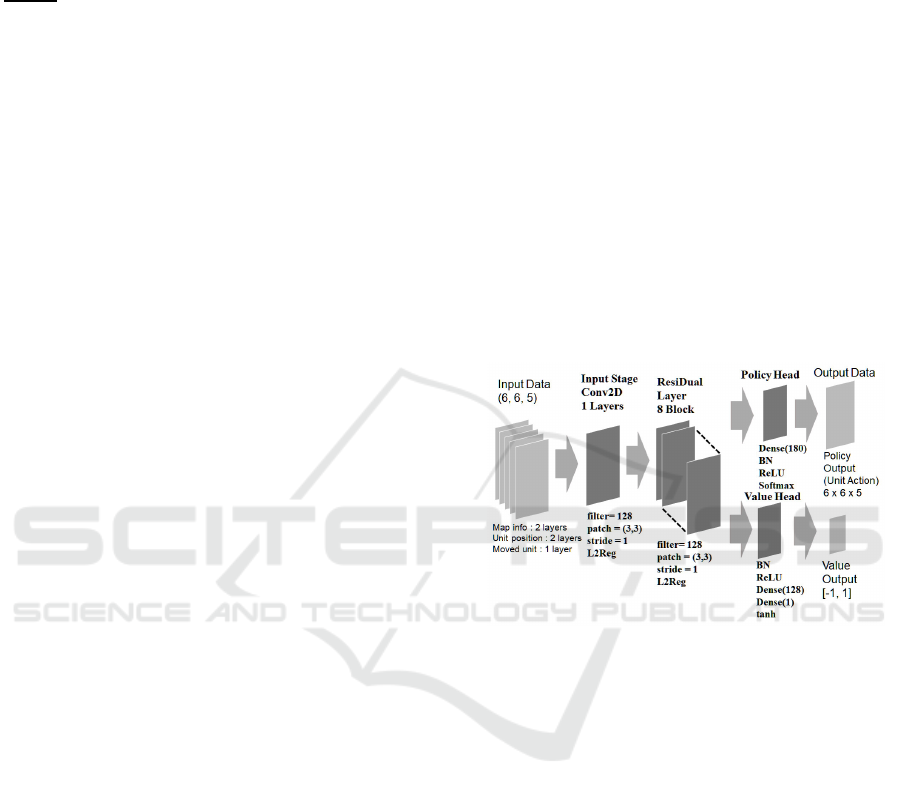
3.4 Neural Network Design
The design of the AlphaZero neural network is modi-
fied in several ways to meet the game’s specifications.
For the input, the map terrain data, the unit position
and HP data, and the data of the moved unit are en-
coded and normalized from 0 to 1. In this study, the
map size is fixed to 6 x 6 and the data consists of 5
layers, so the input data form is 6× 6 × 5.
The data output from the Residual part is divided
into a policy head part and a value head part. The
policy output unit expresses a probability obtained by
combining a movement destination position for ex-
pressing an operation of the unit and a position for
expressing an attack. The output of the value head is
a scalar value of [-1,1] and uses tanh as the activation
function, which predicts the outcome of the game.
3.4.1 Output Data Representation
In this research, 36× 36 × 5 = 6480 output neurons
are required when the data of (acting unit position)
× (moving destination position) × (attack direction)
representing the unit behavior is considered. How-
ever, as proposed in this study, the number of output
neurons is reduced to 36×5= 180 by moving the unit
selection from output to input. A recurrent network
can be used to reduce the number of output neurons
(Kimura and Ikeda, 2019); however,the integration of
the value network is difficult.
3.4.2 Neural Network Block
In the neural network block, the Conv2D layer on the
input layer is connected to the Residual part. The
Residual part has 8 identical Residual blocks with
shortcut connections as shown in Figure 3.
The filter size is 128 on the input layer and Resid-
ual layers, and batch normalization(BN) and ReLU
units are provided. In the policy head section, after
180 affine layers, BN layers, and ReLU, the Soft-
max is used as the activation function. In the value
head section, after BN and ReLU layers, there are 128
and 1 affine layers, and tanh function as an activation
function.
The representation of the unit’s action requires 6
x 6 = 36 cells in the destination representation, and
four direction encoding in the attack representation,
so that 36+ 36×4 = 180 cells are required in one-hot
expression for a single unit.
Figure 3: Neural Network Block.
3.4.3 Residual Network Block
A block diagram of the Residual Network (He et al.,
2015) used in this study is shown in Figure 4. Al-
though eight blocks of Residual layers are stacked
after the input layer, backpropagation in learning is
easily propagated by the shortcut connection of the
Residual Network, which greatly improvesthe perfor-
mance. To improve the convergence of learning, the
using Wide Residual Network (Zagoruyko and Ko-
modakis, 2016) is used as a reference and, dropout
is included in the central part. SeparableConv2D is
used instead of the commonly used Conv2D to save
memory and to increase speed. It is a combina-
tion of DepthwiseConv2D (Howard et al., 2017) and
Conv2D and is written as SepConv2D in the graph.
3.4.4 Learning Setting
For the learning setting, the loss function is expressed
by the following equation.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
558
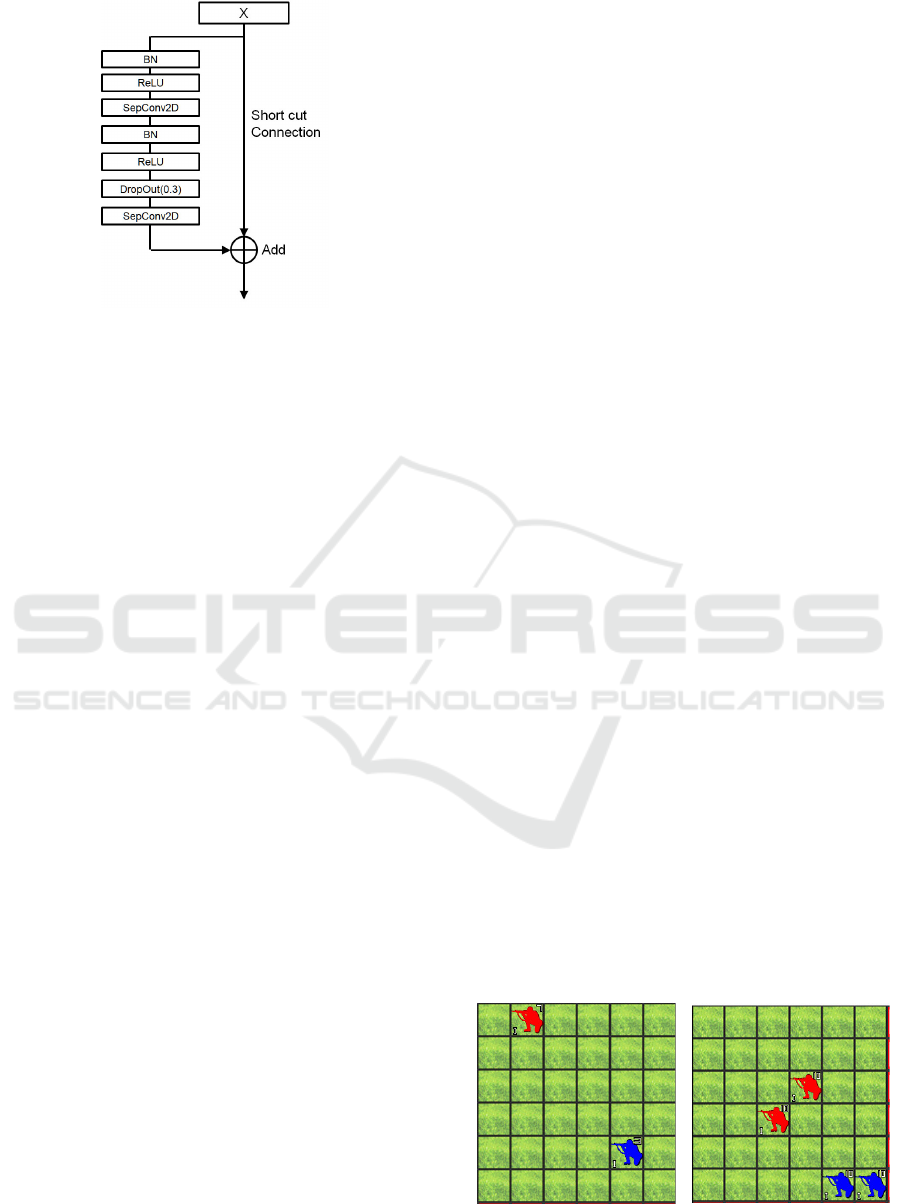
Figure 4: Residual Network Block.
loss = (z− v)
2
+ D
KL
(πkp) + L2Reg (3)
Here, D
KL
(πkp) is the Kullback–Leibler diver-
gence, which is used to stabilize convergence. L2Reg
is the L2 regularization term, where the coefficient is
set to 1×10
−4
. SGD + momentum with Nesterov op-
tion is used as the optimizer, and the moment term
constant is 0.9. The batch size is 128.
4 EXPERIMENTAL RESULTS
This section describes the map group used for learn-
ing, the transition of learning loss, the effect of the
Residual layer and the effect of parameters, the effect
of long-term learning.
4.1 Learning Setting and Results
Comparisons of learning losses were performed to
evaluate the adequacy of the design of the neural net-
work part.
4.1.1 Learning Map Setting
In TUBSTAP, various terrains and units can be used,
but in this paper, we limit it to 6 × 6 size maps where
infantries fights in the plains. The maps used for the
learning process in self-play were mixed with the fol-
lowing structure to simulate all situations and accel-
erate learning.
• Random maps. Random placement and configu-
ration to cover diverse situations. Set HP and po-
sition randomly. The number of units is arranged
in all cases to one vs one, one vs two, and two vs
two (Figure 5 (a)) .
• Technical aspect maps. Maps that manually cuts
out a situation where a specific procedure is re-
quired in an important aspect of the game as
shown in Figure 5 (b).
4.1.2 Learning Curves
To compare the effect of the number of blocks of the
Residual layer, learning of 4, 6, and 8 blocks were
carried out on 500 learning maps, which is approxi-
mately 5000 iterations (because the maximum num-
ber of turns is set to 16, and approximately 8 to 16
turns are executed per game), are shown in Figure 6.
Here, n represents the number of blocks of the Resid-
ual layer. The results show that n = 4 is slightly in-
ferior, while n = 6 and n = 8 almost have equivalent
losses.
Figure 7 compares the policy loss in the same
learning for n = 8, 6, and 4. The results show that
there is no apparent difference in policy loss for dif-
ferent n.
Figure 8 compares the value loss for n = 8, 6, and
4. The results show that n = 4 is slow to converge,
degrades performance, and has an overall bottleneck
performance.
To compare the performance of the Conv2D and
SepConv2D parts in the Residual block, the learn-
ing curves are measured as shown in Figure 9 with
Conv2D having n = 6 and SepConv2D having n = 8.
The results show that both have similar performances.
However, SepConv2D requires less working memory
than Conv2D.
4.2 Experiments
Battle experiments were conducted to evaluate the
performance of the learned neural network and PV-
MCTS. The following two algorithms were employed
as opponents.
• Primitive Monte Carlo (PMC). Simple Monte
Carlo method without tree search. There are 100
rollouts until the end of the game.
(a) Random map.
(b) Technical aspect map.
Figure 5: Learning Map Examples.
High-performance Algorithms using Deep Learning in Turn-based Strategy Games
559

Figure 6: Total loss as of n = 8/6/4.
Figure 7: Policy loss as of n = 8/6/4.
Figure 8: Value loss as of n = 8/6/4.
Figure 9: Loss of n = 8 Seq Conv2D and n =6 Conv2D .
• MCTS. One of conventional Monte Carlo
tree search algorithm using the equation
UCB1 = number of wins/visit count +
p
(log(total visit count/visit count). A total
of 2000 simulations are performed by the rollout.
The rollout continues until the end of the game,
and if the number of visits to each node exceeds
the threshold, the node is expanded.
An experimental battle map, Map01 is shown in Fig-
ure 10 (a). This map is unobstructed, has a size of 6 ×
6, and has two infantry units on each side. This map
is simple at first glance, but because it is a setting with
many movement destinations, it is difficult to search
and is suitable for the evaluation of our algorithm.
4.2.1 Match Settings
The proposed PV-MCTS plays several games against
one of PMC/MCTS. When using a map and playing
2n games on it, PV-MCTS plays Red side n games,
and Blue side n games respectively.
The game ends when either soldier is annihilated
or when the number of turns reaches 16. If it is an-
nihilated, the surviving side wins, and if the number
of turns reaches 16, it is a draw. For PV-MCTS, 500
simulations are always reserved for searching.
To conform to the effect of long-term learning, the
training time was set for approximately 3 weeks with
the parameter setting considered to be adequate, oth-
erwise, it was set to 500 games iterations as the short
mode.
4.2.2 Match Results in Map01
Table 1 shows the parameters in Map01 and the re-
sults of the game experiments. Here, n is the number
of blocks in the Residual layer, time is the training
time, Long denotes a game for approximately 3 weeks
, and Short denotes 500 game iterations.
To investigate the effect of the number of blocks in
the Residual layer, a battle experiment was performed
with n = 8, 6, and 4. We find the performance of
(a) Map01.
(b) Map02.
Figure 10: Experiment Maps.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
560
Table 1: PV-MCTS match results in Map01.
Opponent Time n Sep/Conv2D B
attack
Dropout Win Draw Lose Win Rate(%)
PMC Short 4 SepConv2D 3.7 Yes 7 3 40 14.0
MCTS Short 4 SepConv2D 3.7 Yes
3 5 42 6.0
PMC Short 6 SepConv2D 3.7 Yes 18 5 27 36.0
MCTS Short 6 SepConv2D 3.7 Yes
13 9 28 26.0
PMC Short 8 SepConv2D 3.7 Yes 16 1 33 32.0
MCTS Short 8 SepConv2D 3.7 Yes 11 4 35 22.0
PMC Short 6 Conv2D 3.7 Yes 17 6 27 34.0
MCTS Short 6 Conv2D 3.7 Yes 20 4 26 40.0
PMC Long 8 SepConv2D 0.0 Yes 20 3 27 40.0
MCTS Long 8 SepConv2D 0.0 Yes
24 2 26 48.0
PMC Short 8 SepConv2D 3.7 No 7 3 40 14.0
MCTS Short 8 SepConv2D 3.7 No
6 1 43 12.0
PMC Long 8 SepConv2D 3.7 Yes 130 5 15 86.7
MCTS Long 8 SepConv2D 3.7 Yes 128 6 16 85.3
the n = 8 type is relatively good. Moreover, the per-
formance of Conv2D and SepConv2D in the Resid-
ual blocks, are approximately similar, but Conv2D
requires more memory. The results show that the
win rate in the long training time when B
attack
= 3.7
is approximately half that when B
attack
= 0.0, which
confirms that the B
attack
term has an impact on the
method’s performance. In addition, the win rate is
lower in the setting without dropout, which confirms
that dropout must be added to improve the method’s
performance.
To verify the improvement of the performance af-
ter sufficient learning time, the result of continuing
the training under the same condition for a long time
is presented in the last row of Table 1, which shows a
very high win rate.
4.3 Generalization Ability
As a final test, to evaluate the generalization perfor-
mance of the neural network and determine its ability
to cope with new situations, a battle was performed
on a map that was not used for learning.
Table 2: PV-MCTS match results in map02.
Opponent Win Draw Lose Win Rate(%)
PMC 28 5 17 56.0
MCTS
24 5 21 48.0
Figure 10 (b) shows Map02 with a size of 6 ×
6, which is not included in the learning map of four
infantries at a time. The version of the neural network
used has long term learning, has 8 Residual blocks
with dropout, has SepConv2D, and has B
attack
= 3.7.
The match results are shown in Table 2.
Although Map02 is an new map for PV-MCTS,
the method’s competitive performance remains su-
perior due to the generalization performance of the
neural networks and the searching capability of
PV-MCTS.
4.4 Discussion
Considering the result of experiments about the num-
ber of Residual blocks, it can be said that the num-
ber should be carefully set according to the exper-
imental results. It was also shown that the perfor-
mance of SepConv2D could be equivalent to the typ-
ical Conv2D convolution layer if set appropriately.
The experimental data showed that the bias term in-
troduced in the PUCT equation and the influence of
dropout in Residual layer were effective in the search.
Although the performance of the long-term learn-
ing version was excellent, more effective methods of
accelerating learning are desired because it is disad-
vantageous to have long learning times.
PV-MCTS performed well for battles in an new
map not part of the learning process, which indicated
the superiority of the algorithm. Considering that the
number of simulations was only 500 for PV-MCTS,
3000 to 5000 for PMC, and 2000 for MCTS, PV-
MCTS allowed effective search using the experience
accumulated in neural networks.
5 CONCLUSIONS
The PV-MCTS algorithm, which combines a pol-
icy network and a value network introduced by Al-
phaZero, was applied to a turn-based strategy game
to evaluate its performance. Besides, some modifica-
tions of algorithms were proposed and added to adapt
to the difficulties of such games. The advantage of
High-performance Algorithms using Deep Learning in Turn-based Strategy Games
561

PV-MCTS eliminates the need for a huge database of
game records, reduces the burden of designing neural
networks, and improves learning efficiency.
The design of the search tree had to be modified
to allow the neural network to output complex data
structures representing the actions of the units of turn-
based strategy games. By moving the data of the op-
erating unit from the output of the neural network to
the input, we succeeded in significantly reducing the
design load of the neural network. The unit selection
problem necessary for the multi-unit operation pecu-
liar to turn-based strategy games was also solved by
integrating unit selection into the search tree. Effec-
tive changes such as SepConv2D, B
attack
, and dropout
were also introduced and evaluated. The number of
blocks in the Residual layer was also evaluated.
The new method showed excellent performance as
compared to two simple and classical algorithms. It
also performed well on unlearned maps and showed
generalization by learning. However, when the num-
ber of units was increased, the operation time in-
creased, which is a problem that needs to be fixed in
the future.
In future research, we aim to test the method on a
wide variety of map situations and on maps with more
units.
REFERENCES
Fujiki, T., Ikeda, K., and Viennot, S. (2015). A platform
for turn-based strategy games, with a comparison of
monte-carlo algorithms. In 2015 IEEE Conference on
Computational Intelligence and Games (CIG), pages
407–414.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Deep resid-
ual learning for image recognition. 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 770–778.
Howard, A. G., Zhu, M., Chen, B., Kalenichenko, D.,
Wang, W., Weyand, T., Andreetto, M., and Adam,
H. (2017). Mobilenets: Efficient convolutional neu-
ral networks for mobile vision applications. CoRR,
abs/1704.04861.
Kato, C., Miwa, M., Tsuruoka, Y., and Chikayama, T.
(2013). Uct and its enhancement for tactical decisions
in turn-based strategy games. In Game Programming
Workshop 2013, pages 138–145.
Kimura, T. (2019). Application of reinforcement learning
algorithm using policy network and value network to
the turn-based strategy game. In Game Programming
Workshop 2019.
Kimura, T. and Ikeda, K. (2016). Offering new benchmark
maps for turn based strategy game. In Game Program-
ming Workshop 2016, pages 36–43.
Kimura, T. and Ikeda, K. (2019). Designing policy network
with deep learning in turn-based strategy games. In
16th Advances in Computer Games Conference.
Mnih, V., Kavukcuoglu, K., Silver, D., Rusu, A., Veness, J.,
Bellemare, M., Graves, A., Riedmiller, M., Fidjeland,
A., Ostrovski, G., Petersen, S., Beattie, C., Sadik,
A., Antonoglou, I., King, H., Kumaran, D., Wierstra,
D., Legg, S., and Hassabis, D. (2015). Human-level
control through deep reinforcement learning. Nature,
518:529–33.
Rosin, C. D. (2011). Multi-armed bandits with episode
context. Annals of Mathematics and Artificial Intel-
ligence, 61(3):203–230.
Sato, N., Fujiki, T., and Ikeda, K. (2015). An approach to
evaluate turn-based strategy game positions with of-
fline tree searches in simplified games. In Game Pro-
gramming Workshop 2015, pages 61–68.
Sato, N. and Ikeda, K. (2016). Three types of forward
pruning techniques to apply the alpha beta algorithm
to turn-based strategy games. In 2016 IEEE Con-
ference on Computational Intelligence and Games
(CIG), pages 1–8.
Silver, D., Huang, A., Maddison, C. J., Guez, A., Sifre, L.,
van den Driessche, G., Schrittwieser, J., Antonoglou,
I., Panneershelvam, V., Lanctot, M., Dieleman, S.,
Grewe, D., Nham, J., Kalchbrenner, N., Sutskever, I.,
Lillicrap, T., Leach, M., Kavukcuoglu, K., Graepel,
T., and Hassabis, D. (2016). Mastering the game of
go with deep neural networks and tree search. Nature,
529:484–503.
Silver, D., Hubert, T., Schrittwieser, J., Antonoglou, I., Lai,
M., Guez, A., Lanctot, M., Sifre, L., Kumaran, D.,
Graepel, T., Lillicrap, T., Simonyan, K., and Hass-
abis, D. (2018). A general reinforcement learning
algorithm that masters chess, shogi, and go through
self-play. Science, 362:1140–1144.
Silver, D., Schrittwieser, J., Simonyan, K., Antonoglou, I.,
Huang, A., Guez, A., Hubert, T., Baker, L., Lai, M.,
Bolton, A., Chen, Y., Lillicrap, T., Hui, F., Sifre, L.,
Driessche, G., Graepel, T., and Hassabis, D. (2017).
Mastering the game of go without human knowledge.
Nature, 550:354–359.
Zagoruyko, S. and Komodakis, N. (2016). Wide residual
networks. Computing Research Repository (CoRR),
abs/1605.07146.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
562
