
Model Smoothing using Virtual Adversarial Training for Speech
Emotion Estimation using Spontaneity
Toyoaki Kuwahara, Ryohei Orihara
a
, Yuichi Sei
b
, Yasuyuki Tahara
c
and Akihiko Ohsuga
Graduate School of Information and Engineering, University of Electro-Communications, Tokyo, Japan
Keywords:
Deep Learning, Cross Corpus, Virtual Adversarial Training, Emotion Recognition, Speech Processing,
Spontaneity.
Abstract:
Speech-based emotion estimation increases accuracy through the development of deep learning. However,
most emotion estimation using deep learning requires supervised learning, and it is difficult to obtain large
datasets used for training. In addition, if the training data environment and the actual data environment are
significantly different, the problem is that the accuracy of emotion estimation is reduced. Therefore, in this
study, to solve these problems, we propose a emotion estimation model using virtual adversarial training
(VAT), a semi-supervised learning method that improves the robustness of the model. Furthermore, research
on the spontaneity of speech has progressed year by year, and recent studies have shown that the accuracy
of emotion classification is improved when spontaneity is taken into account. We would like to investigate
the effect of the spontaneity in a cross-language situation. First, VAT hyperparameters were first set by a
preliminary experiment using a single corpus. Next, the robustness of the model generated by the evalua-
tion experiment by the cross corpus was shown. Finally, we evaluate the accuracy of emotion estimation by
considering spontaneity and showed improvement in the accuracy of the model using VAT by considering
spontaneity.
1 INTRODUCTION
In recent years, with the development of deep learn-
ing, research on speech-based emotion recognition is
progressing day by day. Emotion recognition is gain-
ing attention as a task in communication between hu-
mans and between humans and machines, and it is
thought that it can be used to improve the dialogue
quality of dialogue agents communicating with hu-
mans. Emotion recognition problems can be classi-
fied into emotion classification problems and emotion
estimation problems. Emotion classification prob-
lems include classification of specific emotions such
as joy and sadness. Emotion estimation problems in-
clude estimating emotions as a degree of valence, ac-
tivation, and superiority. In addition, various studies
have been conducted to form appropriate consensus
to express human perception(Laukka, 2005),(Laukka
et al., 2005).
Emotion recognition based on speech basically
extracts features (Mel-Frequency Cepstrum Coeffi-
a
https://orcid.org/0000-0002-9039-7704
b
https://orcid.org/0000-0002-2552-6717
c
https://orcid.org/0000-0002-1939-4455
cients, loudness, Voice Probability, etc.) from speech
and trains an estimator or classifier using them. Mel-
Frequency Cepstrum Coefficients(MFCC) is a feature
value that represents the characteristics of the vocal
tract taking into account the features of human speech
perception. However, the problem with speech-based
emotion recognition is that if the voice recording en-
vironment used to collect the training data is dif-
ferent from the actual voice recording environment,
the emotion recognition accuracy decreases. This is
because the extracted features may vary depending
on the ambient conditions during recording, the at-
tributes of the speakers, and the equipment used for
recording. Assuming actual use of a spoken dia-
logue agent, changes in feature values are likely to
occur easily due to differences in the environment in
which the agent exists, the attributes of the conversa-
tion partner, and the recording device of each agent.
In addition, there is a lack of supervised speech cor-
pus available for training, and biases in the language,
culture, speakers, etc. used in the corpus as a prob-
lem of speech-based emotion recognition. Continued
use of such a corpus is thought to affect recognition
results(Kim et al., 2010).
570
Kuwahara, T., Orihara, R., Sei, Y., Tahara, Y. and Ohsuga, A.
Model Smoothing using Virtual Adversarial Training for Speech Emotion Estimation using Spontaneity.
DOI: 10.5220/0008958405700577
In Proceedings of the 12th International Conference on Agents and Artificial Intelligence (ICAART 2020) - Volume 2, pages 570-577
ISBN: 978-989-758-395-7; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Many researches studies have been conducted on
emotion recognition(such as(Han et al., 2014),(Li
et al., 2013)), and various approaches(Kim et al.,
2017)(Sahu et al., 2018) have been taken to solve
these problems. In addition, to make up for the short-
age of corpora, several studies have created corpora
specific to different languages and cultures(Parada-
Cabaleiro et al., 2018)(Kamaruddin et al., 2012).
Some studies are also working to increase train-
ing data using semi-supervised learning(Sahu et al.,
2018), (Kuwahara et al., 2019).
In recent years, research on the spontaneity of
utterances has been widely studied(Dufour et al.,
2009),(Dufour et al., 2014),(Tian et al., 2015), and
there is also research that improves accuracy by con-
sidering spontaneity in emotion classification based
on speech(Mangalam and Guha, 2017); however, this
work did not use spontaneity in emotion estimation
task. These studies simply show that spontaneity is
somehow related to speech and does not go any fur-
ther into quantitative analysis. In our study, spon-
taneity in utterance refers to whether or not humans
naturally expressed utterances. For example, when a
speaker speaks naturally with his / her own conscious-
ness, there is spontaneity, but when a speaker reads
scripts and utters it, there is no spontaneity. However,
there are not many studies that consider the sponta-
neousness of utterance in current emotion recogni-
tion.
Therefore, in this study, we created an emotion
estimation model using Virtual Adversarial Training
(VAT), which is semi-supervised learning, and evalu-
ated the improvement of the robustness of the model
among other languages. In addition, we propose con-
sideration of the spontaneity and evaluate the accu-
racy of emotion estimation using the spontaneity clas-
sification.
The structure of this paper is as follows. In sec-
tion 2, we explain the method used in this research
and the related method. In section 3 we show the dif-
ference between the proposed method and the regres-
sion problem of VAT and emotion estimation method
considering spontaneity. In section 4 we present the
experiment and results followed by a summary in sec-
tion 5. Future prospects are described in section 6.
2 RELATED WORKS
In this section, we explain the emotion classifica-
tion method related to the method used in this study.
Given the set of N labeled data points x
x
x
i
i
i
, y
i
, i =
1, . . . , N, we represent the DNN output for the point
x
x
x
i
i
i
as θ(x
x
x
i
i
i
). θ(x
x
x
i
i
i
) is a vector of probabilities that the
DNN assigns to each class in the label space spanned
by y. We define a loss function based on the DNN
outputs and the one-hot vectors y
y
y
i
i
i
corresponding to
labels y
i
, as shown below. V (θ(x
x
x
i
i
i
),y
y
y
i
i
i
) is the loss of
x
x
x
i
i
i
that can be defined by cross entropy, mean square
error, and so on.
L =
1
N
N
∑
i=1
V (θ(x
x
x
i
i
i
), y
y
y
i
i
i
) (1)
Afterward, we describe adversarial training and
virtual adversarial training, which are methods of
adding a normalization term adverse to model output
to this loss function.
2.1 Adversarial Training (AT)
AT, as proposed by Goodfellow(Goodfellow et al., ),
is a training method that adds errors in model out-
put when perturbation is added to training data x
x
x
i
i
i
as adversarial losses. D is a non-negative function
for quantifying the distance between the prediction
θ(x
x
x
i
i
i
+ r
r
r
a
a
a
i
i
i
), and the target y
y
y
i
i
i
. γ is a tunable hyperpa-
rameter that determines the tradeoff between the orig-
inal loss function and adversarial loss.
L
adv
= L + λ ∗
1
N
N
∑
i=1
D(y
y
y
i
i
i
, θ(x
x
x
i
i
i
+ r
r
r
a
a
a
i
i
i
)) (2)
The perturbation r
r
r
a
a
a
i
i
i
is determined by the equa-
tion below. ε is a hyperparameter that determines the
search neighborhood for r
r
r
a
a
a
i
i
i
.
r
r
r
a
a
a
i
i
i
= arg max
r
r
r:kr
r
rk≤ε
D(y
y
y
i
i
i
, θ(x
x
x
i
i
i
+ r
r
r)) (3)
Considering kr
r
rk to be the Euclidean norm, r
r
r
a
a
a
i
i
i
in
Equation 3 can be approximated as following:
r
a
i
≈ε
g
kgk
2
, where g = ∇x
i
D(y
i
, θ(x
i
)) (4)
By using the above calculations, it is the purpose
of AT to smooth the generated model by adding ad-
versarial loss to the normal loss function and improve
robustness.
2.2 Virtual Adversarial Training (VAT)
Similar to AT, Virtual Adversarial Training (VAT) is
a training method that adds the adversarial loss ob-
tained by applying a perturbation to the input of the
original loss function. VAT uses output of DNN in-
stead of original label to derive adversarial loss unlike
AT. The loss function is defined as follows.
Model Smoothing using Virtual Adversarial Training for Speech Emotion Estimation using Spontaneity
571

L
vadv
= L + λ ∗
1
N
N
∑
i=1
D(θ(x
x
x
i
i
i
), θ(x
x
x
i
i
i
+
+
+ r
r
r
v
v
v
i
i
i
)) (5)
where the adversarial perturbation r
r
r
a
a
a
i
i
i
for the training
example x
x
x
i
i
i
is defined as following:
r
r
r
v
v
v
i
i
i
= arg max
r
r
r:kr
r
rk≤ε
D(θ(x
x
x
i
i
i
), θ(x
x
x
i
i
i
+
+
+ r
r
r)) (6)
Then, define the following equation. KL is the
Kullbac-Leibler divergence (KL divergence), which
represents a distance measure between the probability
distributions. θ
θ
θ is the parameters of a model.
∆
KL
(r
r
r, x
x
x, θ
θ
θ)≡KL[p(y|x
x
x, θ
θ
θ)||p(y|x
x
x +
+
+ r
r
r, θ
θ
θ)|] (7)
Let this be a nonnegative function D and convert
Equation (6) as following:
r
r
r
v
v
v
i
i
i
= arg max
r
r
r:kr
r
rk
2
≤ε
∆
KL
(r
r
r, x
x
x
i
i
i
, θ
θ
θ) (8)
Then, local distributional smoothing (LDS) is de-
fined as following:
LDS(x
x
x
i
i
i
, θ
θ
θ) = ∆
KL
(r
r
r
v
v
v
i
i
i
, x
x
x
i
i
i
, θ
θ
θ) (9)
Then, Equation(5) can be shown as following:
L
vadv
= L + λ ∗
1
N
N
∑
i=1
LDS(x
x
x
i
i
i
, θ
θ
θ) (10)
The computing algorithm of r
r
r
v−adv
is described
in (Miyato et al., 2015). As can be seen from
Equation(5), the adversarial loss of VAT does not
depend on the correct labels. Thus, it can be used
in semi-supervised training scenarios where the first
term L is computed using labeled data, and the sec-
ond term L
vadv
is computed using both labeled and
unlabeled data.
3 GENERATION OF EMOTION
ESTIMATION MODEL USING
VAT CONSIDERING
SPONTANEITY
3.1 Generation of Emotion Estimation
Model using VAT
In this study, we apply VAT to emotion estimation
which is a regression problem. The overview of the
system used in this study is shown in Fig. 1. As
we cannot access large unlabeled data for this experi-
ment, we calculated only using the available data set.
DNN using VAT
Feature
extraction
Input
voices
Output
estimations
Features
Figure 1: The overview of the emotion estimation system
using VAT.
3.2 Difference in VAT in Estimation and
Classification
Unlike the emotion classification problem, the output
of emotion estimation problem is a numerical value.
In VAT, when deriving the KL divergence, we use
the probability vector allocated to each class that out-
putted x
x
x
i
i
i
and x
x
x
i
i
i
+
+
+ r
r
r
v
v
v
i
i
i
by DNN. However, in the case
of a regression problem, as the output is a continu-
ous value, the KL divergence cannot be derived. Ac-
cording (Miyato et al., 2018), in AT, the normal dis-
tribution which centered at y
i
with constant variance
can be used as y
y
y
i
i
i
to calculate L
adv
for regression
tasks. Therefore, to solve this problem when deriv-
ing the KL divergence, we defined a normal distribu-
tion with an average value of θ(x
x
x) and a variance of
1 as p(θ(x
x
x)). We then calculated the KL divergence
between p(θ(x
x
x
i
i
i
)) and p(θ(x
x
x
i
i
i
+
+
+ r
r
r
v
v
v
i
i
i
)).
3.3 Emotion Estimation System
Considering Spontaneity
In this study, we propose an emotion estimation sys-
tem considering spontaneity in order to improve the
accuracy of emotion estimation based on the spon-
taneity of speech. The overview of the system used
in this study is shown in Fig. 2.
The DNN that determines spontaneity is trained
using all utterances, and the DNN that performs emo-
tion estimation is trained using only utterances with
and without spontaneity. The feature used for dis-
crimination of spontaneity and the feature used for
emotion estimation are the same. When speech data
is fed to the system, features are extracted from the
speech, and the spontaneity is first determined using
that feature. After that, if there is spontaneity, the fea-
tures are given to the estimator that trained only by
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
572

Figure 2: The overview of the estimation system using
spontaneity.
utterances with spontaneousness, and if there is no
spontaneity, the features are given to the estimator
trained only by utterances without spontaneity. Fi-
nally, the estimator outputs an estimate of emotion.
4 EXPERIMENT
In this study, first we performed a single corpus ex-
periment for setting hyperparameters, and then per-
formed a cross-corpus experiment using the empirical
hyperparameters to evaluate the accuracy of emotion
estimation using different corpora to show robustness
of the model.
In addition, in order to investigate the contribution
to emotion estimation by considering the spontaneity
of utterances, we first generated an emotion estima-
tion model using VAT for utterances with spontane-
ity and utterances without spontaneity. After that, we
compared the accuracy and investigated the effect of
spontaneity on emotional expression.Then, we com-
pared the estimation accuracy of the emotion estima-
tion system considering the spontaneity of the utter-
ance and the normal emotion estimation system, and
evaluated the contribution to the emotion estimation
by considering the spontaneity.
4.1 Features
In this experiment, we used the features that
were used in INTERSPEECH 2009 Emotion Chal-
lenge(Schuller et al., 2009). The list of the features
is shown in the Table 1.
We use features that are total 32 dimen-
sions including the average power, pitch frequency,
Table 1: Features.
Feature ∆ Statistics
RMS energy ∆ RMS energy amean
F0 ∆ F0 standard deviation
ZCR ∆ ZCR max, maxPos, min, minPos
voice Prob ∆ voice Prob range, skewness, kurtosis
MFCC 1-12 ∆ MFCC 1-12 linregc 1, linregc2, linregerrQ
zero crossing rate, voice probability (proportion
of harmonic components to the total power), 12-
dimensional MFCC for each frame, and their ∆. 12
kinds of statistics (average, standard error, maximum
value and its position, minimum value and its posi-
tion, range of value, kurtosis, skewness, first order
regression coefficient and intercept, regression error
) are computed from 32 features. We calculated 12
kinds of statistics (amean, standard deviation, max,
maxPos, min, minPos, range, skewness, kurtosis, lin-
regc1, linregc2, linregerrQ) using a total of 32 di-
mensions: RMS enregy, F0, ZCR, voice probability,
MFCC (12 dimentions), and Delta for each of them.
In the end, we used 32 * 12 = 384 dimensions to use
as input to the model in total.
To extract features, we used the open-source soft-
ware OpenSMILE(Eyben et al., 2010) developed for
research, such as speech recognition, music recogni-
tion, para-language recognition as developed by Mu-
nich Technical University.
4.2 Experimental Setup
We use a DNN as our regression model, such that
the output layer consisted of one node (correspond-
ing to an emotion value), with ReLU activation func-
tion. The DNN had two hidden layers with the
number of neurons in each layer set to 1200 and
600. The objective function V (θ(x
x
x
i
i
i
), y
y
y
i
i
i
) was cho-
sen to be the mean squared error loss in our experi-
ments. We implemented the VAT model training in
pytorch(Paszke et al., 2017) and performed optimiza-
tion using Adam. Our evaluation metric was mean
absolute error (MAE).
4.3 Single Corpus Experiment
In this experiment, we aimed to optimize the model
by using one corpus and evaluating the change in ac-
curacy of emotion estimation by changing hyperpa-
rameters. Initially, we fixed ε and changed λ to exam-
ine the influence of the model due to the change of λ.
Then, we examined the influence of ε on the model by
fixing λ to the value that was most accurate in the pre-
vious process and changing ε. In this experiment, we
used the Interactive Emotional Dyadic Motion Cap-
Model Smoothing using Virtual Adversarial Training for Speech Emotion Estimation using Spontaneity
573

ture (IEMOCAP)(Busso et al., 2008) dataset, which
is a dialogue corpus containing five groups of one-on-
one dialogues. In this experiment, 1/7 of 10,039 ut-
terances of all subjects were used as test data, and the
rest were used as training data and valence annotated
with estimated numerical values 1 to 5.
4.4 Cross-corpus Experiment
In this experiment, to investigate the robustness of
the model generated by VAT, a corpus other than one
used to train the model was used as input, and its ac-
curacy was compared to ordinary DNN. For this in-
put, we used the Utsunomiya University (UU) Spo-
ken Dialogue Database for Paralinguistic Information
Studies(Mori et al., 2011). In this database, 6 pairs
of utterance contents with intimate relationships are
recorded in Japanese, and a total of 4,840 utterances
are recorded. The emotional states are annotated
with 6 abstract dimensions whose value range are 1
to 7: they are pleasant-unpleasant, aroused-sleepy,
dominant-submissive, credible-doubtful, interested-
indifferent, and positive-negative. In this exper-
iment, we converted pleasant-unpleasant, aroused-
sleepy, and dominant-submissive labels to a scale of
1 to 5, and entered it into the model used in all the ex-
periments. The pleasant-unpleasant label corresponds
to val label, aroused-sleepy corresponds to the act
label, and dominant-submissive label corresponds to
the dom label in IEMOCAP respectively.
4.5 Evaluation of Contribution to
Emotion Estimation by Considering
Spontaneity
This experiment consists of two stages.
In the first step, an emotion estimation model us-
ing VAT was generated for both spontaneous and non-
spontaneous utterances, in order to investigate the ef-
fect of the utterance spontaneity on emotion estima-
tion. Then, we compared the accuracy and investi-
gated the effect of spontaneity on emotional expres-
sion. In this experiment, in IEMOCAP, we treated the
utterances labeled with improvisation(47.8%) as ut-
terances with spontaneity, and the utterances labeled
script labels (52.2%) as utterances without spontane-
ity.
In the next step, based on the results, for the emo-
tion that were determined to significantly contribute
for estimation by consideration of spontaneity, we
compared the accuracy in cases where spontaneity is
considered and where it is not. In the system that con-
sidered utterance spontaneity, we used a DNN that
determined spontaneity as our classification model,
Figure 3: Mean absolute error of emotion estimation chang-
ing λ.
such that the output layer consisted of one node (cor-
responding to spontaneity), with sigmoid activation
function. The DNN had three hidden layers with the
number of neurons in each layer set to 1200, 600 and
300. We used a cross-entropy error for the loss func-
tion. The two DNNs, which are divided by the pres-
ence or absence of spontaneity, were trained in ad-
vance using hyperparameters similar to those in the
cross-corpus experiment using only spontaneous ut-
terances and non-spontaneous utterances in IEMO-
CAP.
In a system that did not consider spontaneity,
DNN using VAT was trained under the same condi-
tions as the previous experiment using all utterances
of IEMOCAP. We used 90 % of all utterances for
training to discriminate spontaneity, and the remain-
ing 10 % was used as test data to compare the accu-
racy of both systems.
4.6 Results and Discussions
4.6.1 Single Corpus Experiment
Fig. 3 shows the result when λ is changed when ε is
fixed to 1.0.
When λ = 1.5, MAE became the smallest: MAE
= 0.734. The cause of the decrease in precision when
λ exceeds 1.5 is that the effect of hostile loss is larger
because λ is a variable that determines the overall pro-
portion of adversarial loss to total loss. It is conceiv-
able that a great influence appears in the original loss
function. From this results, we next experimented
with λ = 1.5.
Fig. 4 shows the result when ε is changed and
when λ is fixed to 1.5.
When ε = 1.5, MAE became the smallest: MAE
= 0.726. When ε exceeded 1.5, the noise became too
large, and excessive smoothing was performed, so it
can be estimated that the accuracy was reduced. From
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
574
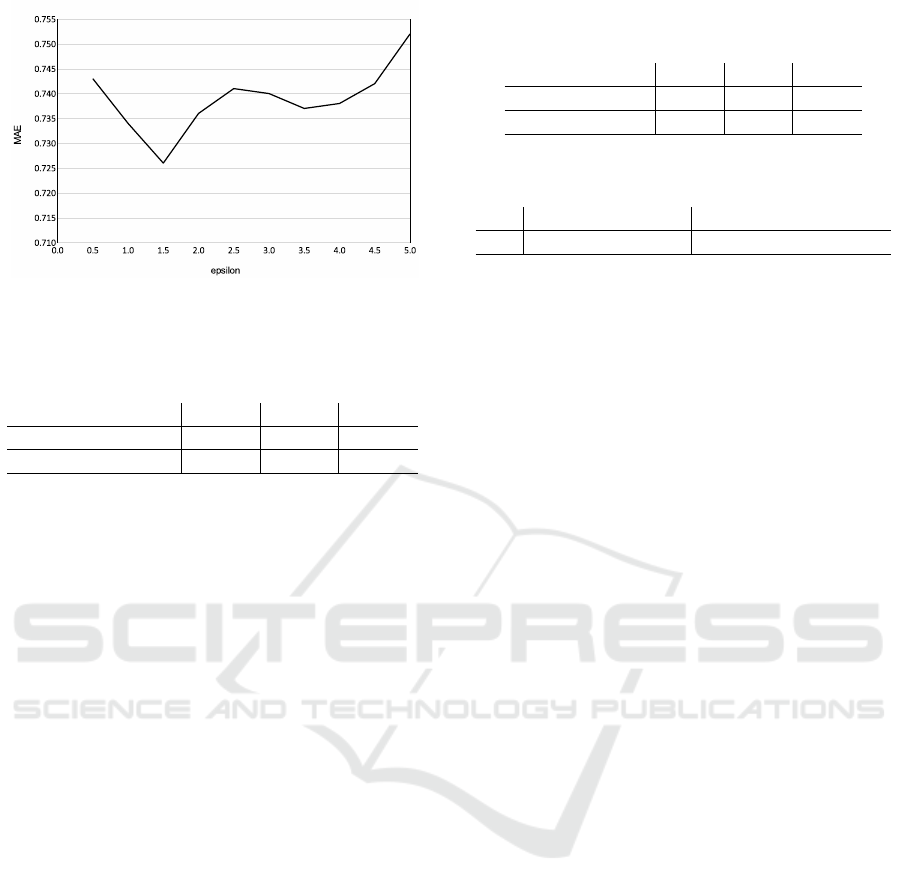
Figure 4: Mean absolute error of emotion estimation chang-
ing ε.
Table 2: Results of MAE of the emotion estimation in cross-
corpus experiment.
val act dom
DNN with VAT 0.6964 0.6633 0.7180
DNN without VAT 0.7011 0.6631 0.7243
these results of the single corpus experiment, we ex-
perimented with ε = 1.5 and λ = 1.5 in the cross-
corpus experiment.
4.6.2 Cross-corpus Experiment
Table 2 shows the resultant MAE of the emotion esti-
mation of DNN and DNN with VAT.
MAE of the emotion estimation of DNN with VAT
of the val and dom labels are less than DNN without
VAT. On the other hand, in the act label, the MAE of
the estimation of DNN without VAT is less than its of
DNN with VAT.
In the val and dom labels, there are differences
of MAE between DNN with VAT and DNN without
VAT. From these results, we consider that there are
differences between Japanese and English in the val
and dom labels(val: p>0.0005, dom:p>0.001), and
VAT improves the robustness of the model against the
gap of language.
On the other hand, the accuracy of DNN using
VAT in the act label was lower than the accuracy of
normal DNN. From this result, it is considered that the
difference in expression of act between Japanese and
English can not be compensated by smoothing using
VAT, and it did not lead to improvement of estimation
accuracy.
In addition, as a future prospect based on these,
it is possible to find differences in emotional expres-
sion between languages and cultures by examining
the change in the accuracy of emotion estimation due
to the use of VAT between more languages and be-
tween cultures.
Table 3: Results of MAE of the emotion estimation which
has spontaneity and which has not.
val act dom
Spontaneity 0.814 0.580 0.657
Not spontaneity 0.690 0.594 0.685
Table 4: Results of MAE of the emotion estimation which
using spontaneity and which not.
Using spontaneity Not using spontaneity
val 0.749 0.761
4.7 Evaluation of Contribution to
Emotion Estimation by Considering
Spontaneity
First, the table 3 shows the accuracy of emotion es-
timation for which only spontaneity utterances was
used in training and only non-spontaneity was used.
From the table 3, it can be seen that the estimation
accuracy is significantly different between utterances
with and without spontaneity in the val label. There-
fore, in the next experiment, we compared the accu-
racy of the val label between the system considering
spontaneity and the normal system.
Table 4 shows the results of accuracy comparison
between the system considering the spontaneity in the
val label and the normal system.
From the table 4, it can be seen that the system
which is considering spontaneity is more accurate
than the system which is not considering spontane-
ity. As a result, it is thought that the consideration of
spontaneity of utterance contributes to the improve-
ment of the accuracy of emotion estimation.
5 CONCLUSION
In this study, in order to improve the degradation of
recognition accuracy due to the difference between
training data and actual data, we aimed to improve the
robustness by smoothing the speech-based emotion
estimation model using VAT. In addition, we aimed to
improve the accuracy of speech-based emotion esti-
mation by estimating emotions considering utterance
spontaneity. As the results of a single corpus experi-
ment, ε = 1.5, and λ = 1.5, were judged to be optimal
in the DNN used in the experiment. Results of the
cross-corpus experiment of DNN using VAT can es-
timate the val and dom labels better than DNN with-
out VAT. Therefore the robustness against the change
of the language of input data was improved by using
VAT. Furthermore, in the verification experiment of
accuracy change considering spontaneity, the MAE of
Model Smoothing using Virtual Adversarial Training for Speech Emotion Estimation using Spontaneity
575

the val label without considering spontaneity is 0.761,
but when considering MAE, it is 0.749. Therefore, by
considering spontaneity, we were able to show a con-
tribution to emotion estimation.
6 FUTURE WORKS
In this study, we experimented with three sim-
ple layers of DNN. However, if the network was
changed, the optimal hyperparameter settings could
also change. Moreover, we simply decided hyper-
parameters by experiments, hence it will be a future
work to use known optimization algorithms to decide
them. Further, we used a normal distribution with
variance 1 as the distribution for measuring KL di-
vergence, but it may be possible to improve the ac-
curacy of emotion estimation by changing the vari-
ance and verifying the change in VAT accuracy. Fur-
thermore, in this study, we conducted a cross-corpus
experiment between Japanese and English, however
as a future task, we will investigate the improvement
of robustness by VAT by conducting a cross-corpus
experiment in other languages and culture areas. In
addition, in this study, we compared the estimation
accuracy using IEMOCAP. IEMOCAP was used for
both training and evaluating. Therefore it is consid-
ered future works to evaluate the contribution of esti-
mation accuracy considering spontaneity using other
language corpora. Finally, we need to conduct sub-
jective assessment experiments to understand how the
estimation error affects the human perception.
ACKNOWLEDGEMENTS
This work was supported by JSPS KAKENHI Grant
Numbers JP17H04705, JP18H03229, JP18H03340,
18K19835, JP19H04113, JP19K12107.
REFERENCES
Busso, C., Bulut, M., Lee, C.-C., Kazemzadeh, A., Mower,
E., Kim, S., Chang, J. N., Lee, S., and Narayanan,
S. S. (2008). Iemocap: Interactive emotional dyadic
motion capture database. Language resources and
evaluation, 42(4):335.
Dufour, R., Estève, Y., and Deléglise, P. (2014). Character-
izing and detecting spontaneous speech: Application
to speaker role recognition. Speech communication,
56:1–18.
Dufour, R., Jousse, V., Estève, Y., Béchet, F., and Linarès,
G. (2009). Spontaneous speech characterization and
detection in large audio database. SPECOM, St. Pe-
tersburg.
Eyben, F., Wöllmer, M., and Schuller, B. (2010). Opens-
mile: the munich versatile and fast open-source au-
dio feature extractor. In Proceedings of the 18th ACM
international conference on Multimedia, pages 1459–
1462. ACM.
Goodfellow, I. J., Shlens, J., and Szegedy, C. Explaining
and harnessing adversarial examples. corr (2015).
Han, K., Yu, D., and Tashev, I. (2014). Speech emotion
recognition using deep neural network and extreme
learning machine. In Fifteenth annual conference of
the international speech communication association.
Kamaruddin, N., Wahab, A., and Quek, C. (2012). Cultural
dependency analysis for understanding speech emo-
tion. Expert Systems with Applications, 39(5):5115–
5133.
Kim, J., Englebienne, G., Truong, K. P., and Evers, V.
(2017). Towards speech emotion recognition" in the
wild" using aggregated corpora and deep multi-task
learning. arXiv preprint arXiv:1708.03920.
Kim, J., Lee, S., and Narayanan, S. S. (2010). An ex-
ploratory study of manifolds of emotional speech. In
Acoustics Speech and Signal Processing (ICASSP),
2010 IEEE International Conference on, pages 5142–
5145. IEEE.
Kuwahara, T., Sei, Y., Tahara, Y., Orihara, R., and Ohsuga,
A. (2019). Model smoothing using virtual adversarial
training for speech emotion estimation. In 2019 IEEE
International Conference on Big Data, Cloud Com-
puting, Data Science & Engineering (BCD), pages
60–64. IEEE.
Laukka, P. (2005). Categorical perception of vocal emotion
expressions. Emotion, 5(3):277.
Laukka, P., Juslin, P., and Bresin, R. (2005). A dimensional
approach to vocal expression of emotion. Cognition
& Emotion, 19(5):633–653.
Li, L., Zhao, Y., Jiang, D., Zhang, Y., Wang, F., Gonzalez,
I., Valentin, E., and Sahli, H. (2013). Hybrid deep neu-
ral network–hidden markov model (dnn-hmm) based
speech emotion recognition. In Affective Computing
and Intelligent Interaction (ACII), 2013 Humaine As-
sociation Conference on, pages 312–317. IEEE.
Mangalam, K. and Guha, T. (2017). Learning spontane-
ity to improve emotion recognition in speech. arXiv
preprint arXiv:1712.04753.
Miyato, T., Maeda, S.-i., Ishii, S., and Koyama, M. (2018).
Virtual adversarial training: a regularization method
for supervised and semi-supervised learning. IEEE
transactions on pattern analysis and machine intelli-
gence.
Miyato, T., Maeda, S.-i., Koyama, M., Nakae, K., and Ishii,
S. (2015). Distributional smoothing with virtual ad-
versarial training. arXiv preprint arXiv:1507.00677.
Mori, H., Satake, T., Nakamura, M., and Kasuya, H. (2011).
Constructing a spoken dialogue corpus for studying
paralinguistic information in expressive conversation
and analyzing its statistical/acoustic characteristics.
Speech Communication, 53(1):36–50.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
576

Parada-Cabaleiro, E., Costantini, G., Batliner, A., Baird, A.,
and Schuller, B. (2018). Categorical vs dimensional
perception of italian emotional speech. Proc. Inter-
speech 2018, pages 3638–3642.
Paszke, A., Gross, S., Chintala, S., Chanan, G., Yang, E.,
DeVito, Z., Lin, Z., Desmaison, A., Antiga, L., and
Lerer, A. (2017). Automatic differentiation in pytorch.
Sahu, S., Gupta, R., Sivaraman, G., and Espy-Wilson,
C. (2018). Smoothing model predictions using ad-
versarial training procedures for speech based emo-
tion recognition. In 2018 IEEE International Con-
ference on Acoustics, Speech and Signal Processing
(ICASSP), pages 4934–4938. IEEE.
Schuller, B., Steidl, S., and Batliner, A. (2009). The in-
terspeech 2009 emotion challenge. In Tenth Annual
Conference of the International Speech Communica-
tion Association.
Tian, L., Moore, J. D., and Lai, C. (2015). Emotion recog-
nition in spontaneous and acted dialogues. In 2015
International Conference on Affective Computing and
Intelligent Interaction (ACII), pages 698–704. IEEE.
Model Smoothing using Virtual Adversarial Training for Speech Emotion Estimation using Spontaneity
577
