
A Triplet-learnt Coarse-to-Fine Reranking
for Vehicle Re-identification
Efklidis Katsaros
1,2
, Henri Bouma
2 a
, Arthur van Rooijen
2
and Elise Dusseldorp
1
1
Leiden University, Niels Bohrweg 1, 2333 CA Leiden, The Netherlands
2
TNO, Oude Waalsdorperweg 63, 2597 AK The Hague, The Netherlands
Keywords:
Vehicle Re-identification, Deep Learning, Coarse-to-Fine, Computer Vision.
Abstract:
Vehicle re-identification refers to the task of matching the same query vehicle across non-overlapping cameras
and diverse viewpoints. Research interest on the field emerged with intelligent transportation systems and
the necessity for public security maintenance. Compared to person, vehicle re-identification is more intri-
cate, facing the challenges of lower intra-class and higher inter-class similarities. Motivated by deep metric
learning advances, we propose a novel, triplet-learnt coarse-to-fine reranking scheme (C2F-TriRe) to address
vehicle re-identification. Coarse vehicle features conduct the baseline ranking. Thereafter, a fully connected
network maps features to viewpoints. Simultaneously, windshields are detected and respective fine features
are extracted to capture custom vehicle characteristics. Conditional to the viewpoint, coarse and fine features
are combined to yield a robust reranking. The proposed scheme achieves state-of-the-art performance on the
VehicleID dataset and outperforms our baselines by a large margin.
1 INTRODUCTION
Vehicle re-identification (re-id) is a recent studied re-
search task in the computer vision community. Given
a query vehicle tracked on a camera, we aim to find
its re-appearances on different ones. Optimization of
transportation, traffic management and mobility in-
creasingly grows research interest on vehicle re-id.
Relevant applications consist of automatic toll collec-
tion and traffic analysis. Vehicle re-id is addressed
independently of license plates as they tend to be in-
discernible in low-resolution videos or faked.
Vehicle re-identification is inspired by the exten-
sively studied person re-id field (Zheng et al., 2016)
but faces substantially different challenges. Given a
static scene, it is easier for human vision to “identify”
a query person in the crowd than a vehicle in a park-
ing lot. Vehicles exhibit larger intra-class semantic
differences compared to persons under diverse view-
points and across different cameras. Simultaneously,
persons tend to bear discriminative parts robust to il-
lumination. Accordingly, human outfit and skin color
are more discriminative than vehicle color. The lat-
ter is more prone to vary considerably under different
lightings.
a
https://orcid.org/0000-0002-9363-6870
The proposed method consists of a novel two-
fold and triplet-learnt coarse-to-fine scheme. Our ap-
proach relies on the simple re-identification assump-
tion that if a vehicle is captured twice by the same
view, windshields should be similar. If they are not
(different logos or stickers), the vehicles compared
are not the same. Prompted by deep metric learning
advances, we employ the triplet loss to learn coarse
and fine vehicle similarities. Given an input vehi-
cle image, we first extract the whole-image features
and use them to perform both the baseline ranking
and viewpoint classification. In the second phase, we
detect and crop the windshields. Subsequently, we
extract the fine windshield features. Conditional to
the viewpoints, we use the windshield distances to
refine the baseline ranking. Windshield information
is explicitly incorporated into our reranking mecha-
nism to further pull same-ID images closer and push
different-ID ones further apart.
The rest of this work is structured as follows. In
Section 2, we discuss related vehicle re-id studies. In
Section 3 we propose our “C2F-TriRe” scheme and
describe its components. In Section 4, we introduce
the dataset and the evaluation metrics. Thereafter, in
Section 5, we present the experiments and compare
the results of our study. Conclusions are drawn in
Section 6.
518
Katsaros, E., Bouma, H., van Rooijen, A. and Dusseldorp, E.
A Triplet-learnt Coarse-to-Fine Reranking for Vehicle Re-identification.
DOI: 10.5220/0008974005180525
In Proceedings of the 9th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2020), pages 518-525
ISBN: 978-989-758-397-1; ISSN: 2184-4313
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 RELATED WORK
Softmax loss retains its popularity in the re-id lit-
erature. Zhu et al. (Zhu et al., 2019) propose
quadruple directional deep learning features to learn
view-invariant representations. The authors introduce
quadruple directional average pooling layers and a
spatial normalization layer in the end of four convo-
lutional networks. The latter are optimized with the
softmax over samples and classes. In another work,
Guo et al. (Guo et al., 2018) combine the softmax with
other partial loss terms into their coarse-to-fine rank-
ing loss function. The partial loss terms impose larger
differences on vehicles of different models (coarse)
and images of vehicles belonging to the same model
but different vehicle identities (fine). A last pairwise
loss term is then added to shrink the (intra-class) vari-
ance of images belonging to the same vehicle identi-
ties.
Given the recent advances in deep metric learn-
ing, many studies employ the triplet loss in various
settings. Kumar et al. (Kumar et al., 2019) transfer
the batch-sampling idea from person (Hermans et al.,
2017) to vehicle re-id and introduce new sampling
schemes for the triplet loss. Bai et al. (Bai et al.,
2018) account for the intra-class variance by formu-
lating subgroups using k-means clustering in the fea-
ture space during training. The weighted average of
jointly optimized triplet and softmax loss functions
is minimized to learn the space. For the triplet loss,
the anchor is selected as the center of the positive in-
stances, whereas the negative sample is picked as the
closest-to-the-anchor negative instance.
Other works focus explicitly on regional infor-
mation. Such is the region aware deep model
(RAM) (Liu et al., 2018). Liu et al. introduce a multi-
branch network trained with both attributes (color,
model) and identities supervision. Features extracted
from global and local branches are fused and a joint
loss function is optimized to account for attributes,
local and global information simultaneously. Zhao et
al. (Zhao et al., 2019) assume a hierarchical structure
in three levels, that is, whole-image, vehicle model
and personalized traits like annual service signs, tis-
sue boxes. An SSD detector is employed to learn
such objects. Therefore, images are manually an-
notated with bounding boxes. A boosting model is
then trained to aggregate features from all levels and
rank images based on classification scores. Learning
personalized information likewise, however, depends
heavily on the plenitude of annotated objects and the
detection performance.
3 PROPOSED METHOD
Motivated by recent advances in deep metric learn-
ing, we adopt the triplet loss to learn vehicle features
on coarse and fine stages. We propose a novel coarse-
to-fine reranking scheme (C2F-TriRe). The proposed
scheme relies on a simplistic re-identification as-
sumption; conditional to the viewpoint, same-identity
vehicle images should bear similar windshields. Per-
sonalized characteristics (stickers, hangings, driver’s
figure, interior decoration, boxes, etc.) should re-
cur on both reappearances of the same vehicle. The
structural components of the proposed scheme are
shown in Figure 1. Our coarse network is a DenseNet-
121 (Huang et al., 2017) optimized to learn vehicle
(dis)similarities. On top of the former a fully con-
nected and an output layer are attached and optimized
to classify viewpoints. We then crop the windshields
and – in the same spirit with the coarse – train an-
other fine DenseNet-121 to learn semantic similari-
ties between windshields. Accordingly, we use the
coarse whole-image features and their L2 distances
to conduct the baseline ranking. Thereafter, the fine
features are introduced to refine the coarse distances
for all query-gallery pairs sharing the same viewpoint.
Different-viewpoint pairs retain their initial baseline
ranking.
FR-CNN
D-121
D-121
FC
Coarse Embedding
Fine Embedding
Viewpoint
Windshield
Vehicle
Figure 1: Proposed coarse-to-fine reranking pipeline, with
DenseNet-121 (D-121), fully connected layer (FC) and
faster R-CNN (FR-CNN).
Prior to the proposed coarse-to-fine reranking, fine
windshields need to be detected. Windshield detec-
tion is a single-object detection task, that is, inter-
est is on one class. Performance-wisely we resort to
the Faster R-CNN (Ren et al., 2015). The detector
scans the input image to detect candidate windshield
patches. Patches deemed as windshields are further
propagated into the detector architecture, for bound-
ing box regression and classification. The coarse net-
work is denoted as f and operates on whole-vehicle
images, projecting semantically similar ones to metri-
cally closer d-dimensional embeddings and dissimilar
ones further apart, such that:
f : R
h×w
→ R
d
, (1)
A Triplet-learnt Coarse-to-Fine Reranking for Vehicle Re-identification
519

where R
h×w
is the space spanning images of height h
and width w. To learn such a mapping, the vision com-
munity resorts to the triplet loss (Schroff et al., 2015;
Hermans et al., 2017; Kumar et al., 2019). The lat-
ter considers three images, an anchor x
n
, one positive
and one negative sample, as (x
n
, x
+
n
, x
−
n
). The triplet
loss for an input triplet is positive when the following
constraint is violated:
f (x
n
) − f (x
+
n
)
2
≥
f (x
n
) − f (x
−
n
)
2
− a, (2)
where α is a pre-defined margin determining the ex-
tend up to which the triplet constraint is violated. The
triplet loss is then defined as follows:
L( f | x
n
, x
+
n
, x
−
n
) =
max(
f (x
n
) − f (x
+
n
)
2
−
f (x
n
) − f (x
−
n
)
2
+ a, 0)
(3)
In the next step, we train a fully connected
network for vehicle viewpoint classification. Triplet
coarse embeddings encode viewpoint information. As
such, the fully connected network is attached on top
of the coarse DenseNet-121 one. Likewise, no further
convolutional operations are required for neither the
training nor the inference phase. The classifier con-
sists of a 256-nodes fully connected layer, followed
by a REctified Linear Unit (ReLU) and the output
one. The viewpoint classifier is denoted as:
v : R
d
→ {back, f ront}, (4)
Thereafter, in the same fashion with the coarse
DenseNet-121, the fine f
w
one is trained with the
triplet loss to operate on windshields, projecting them
on a d-dimensional space which retains their se-
mantic similarities. Assuming an image x
n
, we omit
the detection part and denote fine embeddings as
f
w
(x
n
). Fine distances are meaningful only for same-
viewpoint vehicle images. Assuming a query image q
and a set of gallery images G = {g
1
, g
2
, ..., g
n
}, coarse
and fine distances are – for simplicity – denoted as
d(q, g
i
) and d
w
(q, g
i
). We introduce a reranking rule
as follows; If a pair (q, g
i
) does not share the same
viewpoint, we retain their initial baseline distance as
per the the coarse model. Otherwise, we swift their
distance through a weighted average of coarse and
fine distances. The reranking equation is formulated
as:
d
0
(q, g
i
)
=
λd(q, g
i
) + (1 − λ)d
w
(q, g
i
), v(q)
=
v(g
i
)
d(q, g
i
), otherwise
(5)
The optimal hyper-parameter λ is determined as
the scalar that maximizes performance on the valida-
tion set. Our proposed reranking scheme results in
a two-fold improvement, as illustrated in Figure 2.
When both query and its same-identity expected
match (reappearance) are captured from the same
viewpoint, combined coarse and fine features lead
essentially to more accurate vehicle re-identification.
Distracting gallery vehicles of same viewpoint, color
and model will be pushed further away due to the dis-
similarity of their windshields whereas for the same
reason, the expected image will be pulled closer to
the query. When query and its reappearance are
captured from different viewpoints, distracting same-
view gallery vehicles are pushed further away; simul-
taneously, the expected same-identity one preserves
its baseline distance from the query. Accordingly, it is
more likely to be retrieved.
4 EXPERIMENTAL SETUP
4.1 Dataset
VehicleID (Liu et al., 2016) is one of the largest and
most popular vehicle datasets. It contains 221763 im-
ages of 26267 vehicles (8.7 images/ID) split equally
on the vehicle identity-level to form the train and test
sets consisting of 13164 (110178 images) and 13103
(111585 images) identities respectively. As most real-
world re-id datasets, VehicleID is captured by cam-
eras initially installed for plate verification. Subse-
quently, vehicles appear in two viewpoints, frontal
and backside. In contrast to others, VehicleID is not
yet saturated.
The 13103 identities form three different testing
splits of 800, 1600 and 2400 identities (not all 13103
ones are used) specified by the evaluation protocol.
For each of the splits, the gallery set is formulated
with one image per identity. The rest of the images are
allocated to the corresponding query set. The amount
of images in the query and gallery sets for each of the
splits is shown in Table 1. Query sizes in the table are
slightly different than the ones reported in the original
paper, as the version of the dataset employed for this
work is corrected for fake license plates.
Table 1: Test set splits on the VehicleID dataset.
Number of images Small Medium Large
Query size 5693 11777 17377
Gallery size 800 1600 2400
4.2 Evaluation Metrics
Following the evaluation protocol, we compute the
Cumulative Matching Characteristic (CMC) curve
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
520

Query
Same-ID
Misclassified
Distractor
d1
d3
d2
d1'
d2'
Misclassified
Distractor
Query
Same-ID
d1
d2
d1'
d2'
d3
d3'
Same-View Reappearance Scenario
Different-ViewReappearanceScenario
Figure 2: Schematic representation of the proposed C2F-TriRe reranking mechanism. On the right-hand side, our scheme
can accurately match identical stickers on the frontal windshields of both query and its reappearance (same-ID), pulling them
closer. On the left-hand side, dissimilar windshields push distractors further away; the expected same-ID image retains its
initial distance and is thus the correct match after reranking.
along with the respective Top-1 and Top-5 match rates
(accuracy). CMC@k (at rank k) is defined as follows:
CMC@k =
∑
Q
q=1
gt(q, k)
Q
(6)
where gt(q, k) is an indicator function returning 1
when the ground-truth match for query q belongs in
the first k ranks, 0 otherwise. Q denotes the total
number of queries. Top-1 and Top-5 match rates are
equivalent to CMC@1 and CMC@5 respectively. To
account for query-gallery splitting variability, results
are averaged over 20 replications for all experiments
performed.
5 EXPERIMENTS AND RESULTS
All experiments are performed with PyTorch
1.1.0 (Paszke et al., 2017) utilizing two Tesla K80
GPUs and an Intel Xeon E5-265ov3 @2.30GHz
processor.
5.1 Softmax-learnt Ranking
Similarly to Zhu et al. (Zhu et al., 2019), we imple-
ment a baseline approach, optimizing DenseNet-121
with the softmax loss function. Softmax guides train-
ing towards learning features upon which the feature
space is separated into sub-spaces wherein each class
belongs (decision areas). Learning the convolutional
weights simultaneously with the decision boundaries
results in similar identities being clustered closer to-
gether and dissimilar ones further apart. Upon infer-
ence we rank images based on the L2 distances of the
extracted embeddings.
The training setup is similar to Zhu et al., ex-
cept for the validation strategy. Instead of the
classification-based validation approach “Leave-One-
Image-Out” (L-O-O), we resort to the “Leave-N-
Identities-Out” (L-N-IDs-O). Out of the total 13164
identities in the training set, we randomly allocate
12052 for actual training and the rest 1112 for vali-
dation. Likewise, we measure Top-1 and Top-5 ac-
curacy on the validation identities after each training
epoch. For training, softmax loss is augmented with
an L2 regularization term set at 0.001. Batch size is
set to 128, that is, 32 positive and 32 negative im-
age pairs. Images are resized to 224x224, augmented
by horizontal mirroring and random rotations within
the ranges of [-3 °, 0°] and [0°, 3°]. The network
is trained for 80 epochs. The optimizer employed is
Stochastic Gradient Descent (SGD) with a momen-
tum of 0.9. Learning rate starts from 0.01 and is mul-
tiplied by 0.1 on epochs 45 and 70.
Results of softmax-trained models are depicted in
Table 2. Shifting to the Leave-N-Identities-Out val-
idation strategy, we observe an 1.5-6% and 8-10%
increase on Top-1 and Top-5 accuracy respectively,
compared to match rates reported by Zhu et al.. An
appropriate validation strategy is essential to guide
softmax optimization towards learning embeddings
for re-id. Likewise, a decent baseline is achieved.
A Triplet-learnt Coarse-to-Fine Reranking for Vehicle Re-identification
521

Table 2: Performance evaluation of softmax-trained DenseNet-121 models under different validation setups.
Validation Strategy Small Subset Medium Subset Large Subset
Method Implementation Top-1 Top-5 Top-1 Top-5 Top-1 Top-5
L-O-O (Zhu et al., 2019) 66.10 77.87 67.39 75.49 63.07 72.57
L-N-IDs-O Ours 72.26 89.25 68.57 84.09 65.11 80.44
5.2 Triplet-Learnt Coarse-to-Fine
Reranking Scheme
5.2.1 Coarse Triplet Learning
While softmax preserves inter-class distances to re-
tain efficacy of decision boundaries, the triplet loss
learns inter-class differences and intra-class similari-
ties simultaneously. Accordingly, triplet-learnt vehi-
cle embeddings are more representative for re-id as
intra-class variance is further minimized. The coarse
proposed network is a DenseNet-121 trained with
the triplet loss. To address triplet optimization lim-
itations, we construct the triplets “within-the-batch”.
Therefore, we resort to the batch-all (BA) (Hermans
et al., 2017) batch-sampling strategy as it hardly de-
pends on the choice of the margin α (see Eq. 3).
The experimental setup for triplet optimization is
described as follows. For each update, we sample
P identities comprising of K images each, compos-
ing a batch of PK images. Out of these, we con-
struct all possible PK(PK-K)(K-1) triplets and retain
the ones that violate the triplet constraint, that is, the
ones that yield non-zero loss values. Batch size is set
to 72 (P=12, K=4) and the margin α is set at either
0.3 or 0.7. Following common practices in the litera-
ture (Hermans et al., 2017; Kumar et al., 2019), Adam
is used as the optimizer, further augmented with an
L2 regularization term fixed at 0.001. The learning
rate is set to 0.0002 and is multiplied by 0.85 every
30 epochs for 300 in total. One epoch is one pass
over all the identities (but not all images) and both
our validation and data augmentation frameworks are
identical to our classification approach described in
subsection 5.1.
Results are shown in Table 3. Top-1 and Top-5 ac-
curacy for DenseNet-121 initialized on ImageNet and
trained with a 0.3 margin is 76.68% and 94.70% re-
spectively on the small subset, that is, a minor upsurge
compared to the 0.7 margin. Deviations on the larger
subsets are of similar magnitude.
Compared to softmax, the triplet-trained coarse
DenseNet-121 leads to higher results. Metric learn-
ing of parameters f propagates more meaningful gra-
dients for the re-identification task. Accordingly,
triplet-learnt vehicle embeddings are robust, that is,
they accommodate the viewpoint-caused variability
and are thus semantically more representative.
5.2.2 Viewpoint Classification
Conditional to our coarse network, we show that
viewpoint classification can be reliably performed
with only minor mistakes. Therefore, we design a
feed-forward fully connected network to classify ve-
hicle images in two classes, namely, front and back-
side view.
We annotate viewpoints on 5600 randomly se-
lected vehicle images. The train, validation and test
sets consist of 3250, 950 and 1400 images respec-
tively. A fully connected network is attached on our
coarse triplet network. The learning rate is set to 0
for the latter and 0.01 for the former. Accordingly,
only the newly-introduced fully connected weights
are learnt. For all experiments, the learning rate is
multiplied by 0.9, every 30 epochs, for 150 in to-
tal. Four experiments are performed, connecting the
triplet embedding layer (1024) with a pre-last layer
entailing 32, 128, 256 or 512 nodes followed by a
RELU and a two-nodes output layer followed by a
Sigmoid activation. A last sub-experiment is per-
formed connecting directly the embedding with the
output layer. The optimization objective loss mini-
mized is the softmax.
The results for our viewpoint classification model
are illustrated in Table 4. A network with 256 hidden
nodes is the best-performing fully connected compo-
nent. Respective accuracy on the test set is 98.34%.
Architectures with less connections yield inferior re-
sults. Therefore, viewpoint classification can be accu-
rately performed and error propagation into the C2F-
TriRe scheme is minimized.
5.2.3 Windshield Detection
A Faster R-CNN (Ren et al., 2015) object detector is
trained to extract windshields from images of vehi-
cles. Regarding windshield detection, two classes are
of interest, windshield or not (background). Faster
R-CNN bears a ResNet-51 backbone network and is
pre-trained on the COCO dataset (Lin et al., 2014).
The latter consists of 81 different classes (80 or back-
ground) of instances. The detector is now fine-tuned
to learn the two classes.
The experimental setup is the following. The
81-nodes classification layer is substituted by a two-
nodes one. The regression layer is retained as such.
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
522

Table 3: Performance evaluation of triplet-trained DenseNet-121 models under different margins.
Training Details Small Subset Medium Subset Large Subset
Loss Margin Top-1 Top-5 Top-1 Top-5 Top-1 Top-5
Triplet α = 0.7 75.93 93.12 71.03 89.94 66.92 86.98
Triplet α = 0.3 76.68 94.52 71.76 90.97 67.78 87.45
Table 4: Fully connected networks performance on view-
point classification. Validation column refers to the accu-
racy value evaluated on the validation set upon convergence.
Training Details Validation Test
Connections Accuracy
(1024, 2) 77.06 75.13
(1024, 32, 2) 97.58 97.35
(1024, 128, 2) 97.91 97.90
(1024, 256, 2) 98.24 98.34
(1024, 512, 2) 98.24 98.19
To fine-tune the detector on learning windshields, we
annotate 700 images, 500 for training and 200 for val-
idation. The bounding boxes are manually drawn so
as to encompass the whole windshields. The detector
is trained for 50 epochs with a batch size of 4. Op-
timizer used is SGD with a learning rate, a momen-
tum and an L2-penalty of 0.005, 0.9 and 0.0005 re-
spectively. In accordance with the latest detection re-
search we adopt the COCO evaluation metrics. Model
weights are saved upon the highest noted AP@IoU of
0.75 on the validation set.
Observed validation statistics converge in 10
epochs, as, first, the detector is pre-trained on a larger
and challenging dataset and second, due to the small
amount of our manually annotated windshields. Val-
ues for AP@IoU of 0.5 and 0.75 are 0.99 and 0.97.
Qualitative evaluation of bounding boxes yields no
detection errors on inspected images. Boxes pre-
dicted on unseen vehicles encompass the whole wind-
shields, identically to our annotations. Faster R-CNN
is clearly able to detect windshields, regardless of
scale, location and vehicle type.
5.2.4 Fine Triplet Learning
Similarly to the coarse triplet network, we optimize a
fine DenseNet-121 to learn semantic similarities be-
tween windshields. We infer windshields and view-
points over the VehicleID training set to construct a
custom “windshields” dataset. Then, we group wind-
shield images based on vehicle identity and inferred
viewpoint. Each new windshield identity contains all
images of a vehicle identity sharing the same view-
point. Accordingly, a vehicle identity which con-
tained 16 images out of which 10 were front and
6 were backside-viewed, now yields two new wind-
shield identities. We retain only identities with five
images or more. The windshields dataset consists of
7362 identities (74658 images) used for training and
another 691 (6462 images) for validation.
We train the fine triplet DenseNet-121 under the
following setup. Windshields are resized to mean
height and width (62×152). We resort to the same
BA sampling strategy, using a batch size (P*K, with
various combinations of P. K, of 140 and margins α of
0.2 and 0.5. One pass over the training dataset loops,
again, over all windshield classes. We retain random
rotations, but we do not flip images horizontally, as
discriminative spatial features are subject to be con-
founded. Optimizer is again Adam, with a learning
rate and an L2-penalty of 0.0001 and 0.001. The for-
mer is multiplied with 0.9 every 30 for 240 epochs in
total. Identically to the coarse network, weights are
now saved upon highest validation Top-1 accuracy on
matching windshields.
Results for the fine triplet DenseNet-121 on our
custom validation set are illustrated in Table 5. A
0.5 margin performs slightly higher. Choice of
P,K does not severely impact learning of windshield
(dis)similarities. The model optimized with a 0.5
margin over batches of P=17 identities and K=8 im-
ages each is utilized as the fine-grained feature extrac-
tion component of the proposed method.
Table 5: Triplet fine DenseNet-121 performance on match-
ing windshields. Validation columns refer to Top-1 and
Top-5 match rates observed on the custom validation set
upon convergence.
Training Details Validation
Margin P×K Top-1 Top-5
α = 0.2 20×7 90.47 95.61
α = 0.5 17×8 90.91 96.03
α = 0.2 35×4 90.32 95.57
α = 0.5 35×4 90.87 95.79
5.2.5 Coarse-to-Fine Reranking
Prior to evaluating our coarse-to-fine reranking
scheme, the hyper-parameter λ is chosen based on
Top-1 match rate on the L-N-IDs-O validation set
(1112 vehicle identities). Therefore, we evaluate
coarse and fine features over the latter and re-rank
gallery candidates conditional to inferred viewpoints
(see Eq. 5) for each λ. We perform additional experi-
ments for the parameter k - referring to the number of
the nearest (as per the coarse ranking) vehicles to be
reranked for each query.
A Triplet-learnt Coarse-to-Fine Reranking for Vehicle Re-identification
523
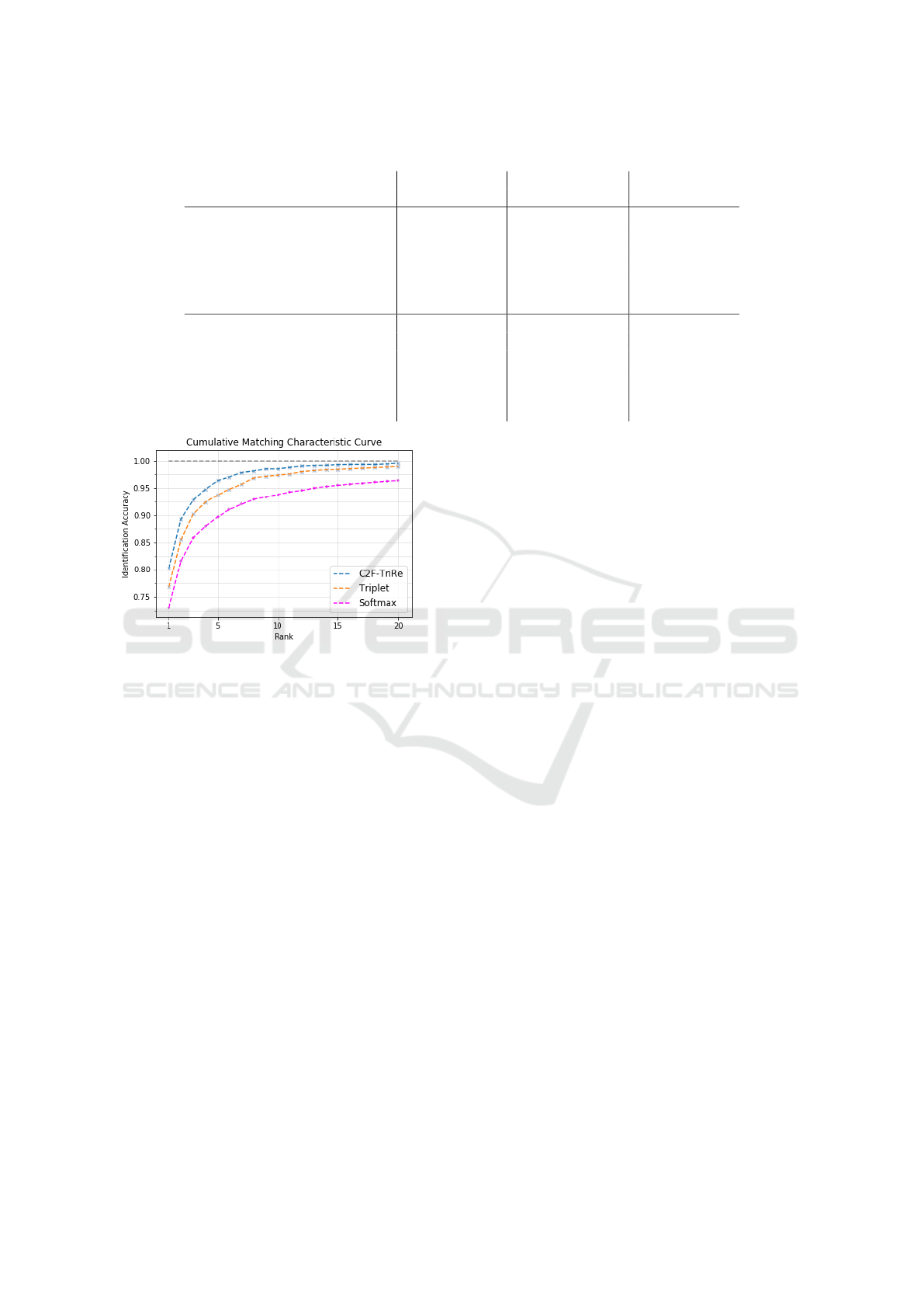
Table 6: Comparative results of the proposed C2F-TriRe versus baselines and various related works on the VehicleID dataset.
Method Small Subset Medium Subset Large Subset
Top-1 Top-5 Top-1 Top-5 Top-1 Top-5
QD-DLF(Zhu et al., 2019) 72.3 92.5 70.6 88.9 69.0 88.3
C2F-Rank(Guo et al., 2018) 61.1 81.7 56.2 76.2 51.4 72.2
XG-6 (Zhao et al., 2019) 76.1 92.0 73.1 88.1 71.2 84.4
RAM (Liu et al., 2018) 75.2 91.5 72.3 87.0 67.7 84.5
GS-TRE (Bai et al., 2018) 75.9 84.2 74.8 83.6 74.0 82.7
Triplet BS (Kumar et al., 2019) 78.8 96.2 73.4 92.6 69.3 89.4
Softmax Ranking 72.26 89.25 68.57 84.09 65.11 80.44
Triplet Ranking (Coarse) 76.68 94.52 71.76 90.97 67.78 87.45
C2F-TriRe (k=10) 79.63 95.82 76.06 93.03 70.44 88.62
C2F-TriRe (k=20) 79.51 95.70 75.64 93.11 71.57 89.94
C2F-TriRe (k=30) 79.87 95.78 75.82 93.08 71.77 90.01
C2F-TriRe (k=50) 80.28 96.34 76.09 93.13 72.23 90.08
Figure 3: CMC curve of C2F-TriRe versus triplet-learnt
(coarse) and softmax-learnt ranking on the small VehicleID
subset.
Results of our C2F-TriRe scheme are depicted in
Table 6. The CMC curve is shown in Figure 3. The
optimal hyper parameter λ was found to be 0.85. C2F-
TriRe outperforms the triplet (coarse) and softmax
models by Top-1 and Top-5 margins of 3-4.5% and
8-9% respectively on the small VehicleID subset. The
margin is consistent over all test sets of VehicleID for
both match rates. Moreover, we show that, with a
negligible accuracy trade-off one can minimize com-
putational time by restricting windshield detections
and evaluations to only 10 (k-closest as per the coarse
ranking) for each query. The additional computa-
tional cost of C2F-TriRe more than the coarse em-
bedding is negligible when k is much smaller than the
gallery set (e.g. k = 10, n = 2400). Note that, due
to sampling variability, match-rates are not necessar-
ily monotonically increasing with k on the small and
medium subsets. Compared to the top-performing ap-
proaches, C2F-TriRe notes the highest performance
on all subsets and ranks of the VehicleID dataset, ex-
cept for Top-1 on the large version, where GS-TRE
reports an 1.8% higher match rate. Regarding Top-
5 rates, C2F-TriRe outperforms GS-TRE by a mar-
gin of 12%, 10% and 7%, on the small, medium and
large subsets, respectively. Furthermore, the proposed
method achieves an 1.5-3% upsurge on Top-1 match
rate compared to Triplet BS.
6 CONCLUSION
In this paper, we propose C2F-TriRe, a novel coarse-
to-fine reranking scheme for vehicle re-identification.
The introduced method involves a triplet coarse net-
work operating on whole-vehicle images, a fully
connected one for viewpoint classification, a wind-
shield detector and one triplet fine network oper-
ating on the windshield area. The whole-image
features are extracted with the coarse DenseNet-
121; they are utilized for the baseline ranking be-
fore inputted for viewpoint classification. Condi-
tional to the viewpoint, a fine DenseNet-121 is then
used to extract windshield features. Upon infer-
ence, a different-viewpoint query-gallery pair retains
its coarse, baseline distance whereas same-viewpoint
ones are reranked.
The proposed C2F-TriRe exploits metric learn-
ing advances to incorporate personalized vehicle in-
formation into a robust vehicle re-id system. Our
C2F-TriRe scheme outperforms both baselines and
related works. We show that, extending end-to-end
deep learning architectures to a coarse-to-fine vision
system leads to increased vehicle re-id performance.
Moreover, restricting reranking to a small number k,
– referring to the coarsely-ranked nearest neighbors
– reduces dramatically computational expenses with
only a minor performance trade-off. Future work
could include generalization to other viewpoints, such
the side view.
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
524

ACKNOWLEDGEMENTS
Portions of the research in this paper use the Vehi-
cleID dataset collected under the sponsor of the Na-
tional Natural Science Foundation of China.
REFERENCES
Bai, Y., Lou, Y., Gao, F., Wang, S., Wu, Y., and Duan, L.-Y.
(2018). Group-sensitive triplet embedding for vehicle
reidentification. IEEE Transactions on Multimedia,
20(9):2385–2399.
Guo, H., Zhao, C., Liu, Z., Wang, J., and Lu, H. (2018).
Learning coarse-to-fine structured feature embedding
for vehicle re-identification. In Thirty-Second AAAI
Conference on Artificial Intelligence.
Hermans, A., Beyer, L., and Leibe, B. (2017). In defense
of the triplet loss for person re-identification. arXiv
preprint arXiv:1703.07737.
Huang, G., Liu, Z., Van Der Maaten, L., and Weinberger,
K. Q. (2017). Densely connected convolutional net-
works. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 4700–
4708.
Kumar, R., Weill, E., Aghdasi, F., and Sriram, P. (2019).
Vehicle re-identification: an efficient baseline using
triplet embedding. arXiv preprint arXiv:1901.01015.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Euro-
pean conference on computer vision, pages 740–755.
Springer.
Liu, H., Tian, Y., Yang, Y., Pang, L., and Huang, T. (2016).
Deep relative distance learning: Tell the difference be-
tween similar vehicles. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 2167–2175.
Liu, X., Zhang, S., Huang, Q., and Gao, W. (2018). Ram: a
region-aware deep model for vehicle re-identification.
In 2018 IEEE International Conference on Multime-
dia and Expo (ICME), pages 1–6. IEEE.
Paszke, A., Gross, S., Chintala, S., Chanan, G., Yang, E.,
DeVito, Z., Lin, Z., Desmaison, A., Antiga, L., and
Lerer, A. (2017). Automatic differentiation in pytorch.
In NIPS-W.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Advances in neural information
processing systems, pages 91–99.
Schroff, F., Kalenichenko, D., and Philbin, J. (2015).
Facenet: A unified embedding for face recognition
and clustering. In Proceedings of the IEEE conference
on computer vision and pattern recognition, pages
815–823.
Zhao, Y., Shen, C., Wang, H., and Chen, S. (2019). Struc-
tural analysis of attributes for vehicle re-identification
and retrieval. IEEE Transactions on Intelligent Trans-
portation Systems.
Zheng, L., Yang, Y., and Hauptmann, A. G. (2016). Per-
son re-identification: Past, present and future. arXiv
preprint arXiv:1610.02984.
Zhu, J., Zeng, H., Huang, J., Liao, S., Lei, Z., Cai, C.,
and Zheng, L. (2019). Vehicle re-identification us-
ing quadruple directional deep learning features. IEEE
Transactions on Intelligent Transportation Systems.
A Triplet-learnt Coarse-to-Fine Reranking for Vehicle Re-identification
525
