
New Commercial Representation for Cattle Information Gathering
Jorge Navarro
a
, Isaac Mart
´
ın de Diego
b
, Karen Pr
´
ıncipe-Aguirre and Mar
´
ıa Jes
´
us Algar
c
Data Science Laboratory, Rey Juan Carlos University, C/ Tulip
´
an, s/n, 28933, M
´
ostoles, Spain
Keywords:
Internet of Things, Data Science, Time Series, Cattle Behavior, Representation Information.
Abstract:
As the development of Wireless Sensor Networks improves, new applications of Internet of Things are
emerging in sectors as diverse as military, environmental, health or food. In many of these applications, the
autonomy of the devices is an essential element in order to make reasonable use of them. For the cattle domain,
there is a need for an efficient use of energy by sending few messages that accumulate as much information
as possible. This paper proposes a new strategy for sending summarized information from devices that are
commercially used in cattle to analyze animal behavior. Experiments using 120 different daily time series
related to animal behavior have been performed. The obtained results show that the proposed strategy highly
improves the current operation mode of the equipment.
1 INTRODUCTION
Given the rapid growth that Internet of Things
(IoT) has experienced over recent years through
the development of Wireless Sensor Networks
(WSNs), there is a clear interest from society
in the development of technologies that favor the
communication between people and devices (Tan and
Wang, 2010). This communication allows to control
at any time certain processes that may be key for
some sectors such as military, environmental, health
or home applications among others (Akyildiz et al.,
2002).
Within the wide range of sensors available for
different IoT applications, accelerometers have been
widely used for activity recognition purposes (Ravi
et al., 2005; Brezmes et al., 2009). In the livestock
industry, accelerometers have allowed to record
information about animal status in a myriad of studies
(Martiskainen et al., 2009; Diosdado et al., 2015).
In addition, for processes in which devices are
hardly accessible, it is of crucial importance to
provide long-term autonomies to users of the system
(Duarte-Melo and Liu, 2002). Consequently, there
must be a compromise between the amount of data
sent by WSNs and the expected battery life of
the devices used to gather information within the
system. Animal monitoring in extensive livestock
a
https://orcid.org/0000-0001-9698-3213
b
https://orcid.org/0000-0001-5197-2932
c
https://orcid.org/0000-0002-7539-8522
farming is a clear example of this type of systems.
The more information gathered and sent, the more
energy consumption from wireless devices. However,
reducing the amount of data sent in order to improve
the life of the devices may result in situations in which
the information collected does not faithfully reflect
animal behavior.
Hence, there is a need to design information
submissions as efficient as possible, collecting data
that gather the maximum possible knowledge about
animal behavior in each submission. More accurate
representations of animal behavior could improve
real-time problems detection, speed up the reaction
of farmers and reduce the number of potential animal
losses or health issues.
This need is one of the main goals sought by the
Digitanimal project (Digitanimal, 2019). Digitanimal
commercializes several IoT-based devices and
services specially designed to gather and analyze
information about animal behavior in extensive
raising. With the combination of these devices and
services, Digitanimal offers their customers a system
for monitoring animal welfare that can be translated
into an increase in the productivity.
The development of these services and devices
is carried out in collaboration with multiple research
centers and experimental farms within European
projects such as CattleChain (CattleChain, 2019).
As a result of this collaboration, Digitanimal
receives information related to events of interest
that have happened to monitored animals, such
526
Navarro, J., Martín de Diego, I., Príncipe-Aguirre, K. and Algar, M.
New Commercial Representation for Cattle Information Gathering.
DOI: 10.5220/0008978405260534
In Proceedings of the 9th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2020), pages 526-534
ISBN: 978-989-758-397-1; ISSN: 2184-4313
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
as calvings or heats, through the commercialized
devices. The combination of these sources of
information, collaborations and devices, has allowed
the publication of different studies in the area of IoT
and WSNs (Navarro et al., 2019; P
´
erez et al., 2019).
In this work a dimensionality reduction technique
and a distance function are combined to analyze
accuracy in the representation of time series. The
major goal is to improve the quality of cattle
information gathering with WSNs.
The remainder of this paper is organized as
follows. Section 2 presents a review of studies
and different techniques used for representation and
comparison of longitudinal data related to animal
behavior as well as a detailed description of the
problem to be solved. In Sections 3 and 4 a new
strategy is proposed for data gathering and evaluated
achieving promising performance improvements. The
results obtained are analyzed and discussed in Section
5. Finally, Section 6 presents the main conclusions of
the study.
2 RELATED WORK
2.1 Background
The analysis of longitudinal data has been a growing
research area during the last years. The wide variety
of sectors in which time series analysis is necessary
has resulted in a large amount of new techniques for
time series representation such as Discrete Fourier
Transformation (Faloutsos et al., 1994), Discrete
Cosine Transformation (Korn et al., 1997) or Discrete
Wavelet Transformation (Chan and Fu, 1999).
The Symbolic Aggregate aproXimation (SAX)
(Lin et al., 2003) is a time series representation
widely used by the community (Lkhagva et al., 2006;
Notaristefano et al., 2013). SAX is a dimensionality
reduction technique that allows the transformation of
numerical time series into a group of symbols or
letters, reducing its size and discretizing its values.
For size reduction, SAX relies on the use of
Piecewise Aggregate Approximation (PAA) (Keogh
et al., 2001) which normalizes, i.e., transform to
mean zero and standard deviation one, and splits
time series into equi-length sections computing the
average value of each one. Once PAA is applied, SAX
discretizes values of the PAA result by mapping the
averages computed to some predefined equiprobable
levels. These levels are identified with symbols
and calculated through different breakpoints, as seen
in Table 1, that produce equal-sized areas under a
Gaussian curve. This can be done thanks to the
Table 1: Breakpoints (γ) in a Gaussian distribution. From 4
to 8 equiprobable levels (α).
γ
α
4 5 6 7 8
γ
1
-0.67 -0.84 -0.97 -1.07 -1.15
γ
2
0 -0.25 -0.43 -0.57 -0.67
γ
3
0.67 0.25 0 -0.18 -0.32
γ
4
—— 0.84 0.43 0.18 0
γ
5
—— —— 0.97 0.57 0.32
γ
6
—— —— —— 1.07 0.67
γ
7
—— —— —— —— 1.15
fact that normalized time series have a Gaussian
distribution (Larsen et al., 1986). SAX offers multiple
advantages against other time series representation
techniques such as dimensionality reduction or lower
bounding of the true distance between the represented
and the original time series (Lin et al., 2003).
Besides time series representation, measuring
distances between time series has also been of
relevance for the scientific community. Thus,
different similarity metrics and distances have been
proposed like Euclidean distance (Faloutsos et al.,
1994), Dynamic Time Warping (Berndt and Clifford,
1994), Longest Common Subsequence (Vlachos
et al., 2002) or Edit Distance with Real Penalty (Chen
and Ng, 2004).
2.2 Problem Description
Digitanimal commercializes several IoT devices
specially designed to analyze animal behavior. This
work is based on the use of two kind of these devices:
Digitanimal’s core product and a prototype developed
for research purposes. The main aim of the presented
work is to improve the quality of the information sent
by the commercial product through the data gathered
with the research prototype.
The core product of Digitanimal is a collar (see
Figure 1) equipped with a GPS system, a surface
temperature sensor and a 3-axis accelerometer. This
device, placed on the neck of the animal, sends a
message with information captured by its sensors to
the servers of the company, at a fixed time rate of 30
minutes.
The message sending is realized through an IoT-
based communication technology, Sigfox (Sigfox,
2019). This technology introduces important
restrictions regarding the amount of information to
be sent: 12 bytes per message at most and no more
than 140 messages per day or a message every 11
minutes. Currently, the 12 bytes are distributed in the
New Commercial Representation for Cattle Information Gathering
527

Figure 1: Digitanimal collar placed on an animal.
following way: 42 bits for GPS coordinates, 6 bits
for temperature and 48 bits for accelerometer data (16
bits per axis).
A time rate of 30 minutes allows to ensure that
collars have a battery life for over a year without
the need of replacement. This is one of the main
competitive advantages of Digitanimal and, thus,
this study has not contemplated the possibility of
reducing this rate. Besides, Digitanimal considers 30
minutes as an appropriate time rate for monitoring
animal behavior through one-off GPS and surface
temperature measurements. For this reason, the way
GPS and temperature sensors information is sent has
neither been part of this study.
The gathering of accelerometer information is
carried out differently than the GPS and surface
temperature. Several measurements are taken in a
time window of 30 seconds for each of its axis instead
of just one measurement. Then, average (AVG),
standard deviation (SD) and maximum excursion
(EX) variables are computed from the recorded
measurements. Hence, is essential to increase the
amount of information captured by the accelerometer
within the 30 minutes between each sent message,
taking into account that Digitanimal considers the
AVG variable of greater importance than SD or EX.
On the other hand, the prototype developed
by Digitanimal is a continuous measurement (CM)
device similar to the commercial one. The main
difference between them is that the CM device
only incorporates the accelerometer and it records
information in another way. Every 5 seconds, this
device stores the current position of the accelerometer
in a memory card that is recovered once the data
collection is completed. This device is placed on the
neck of the animal and uses the same green casing as
the commercial one.
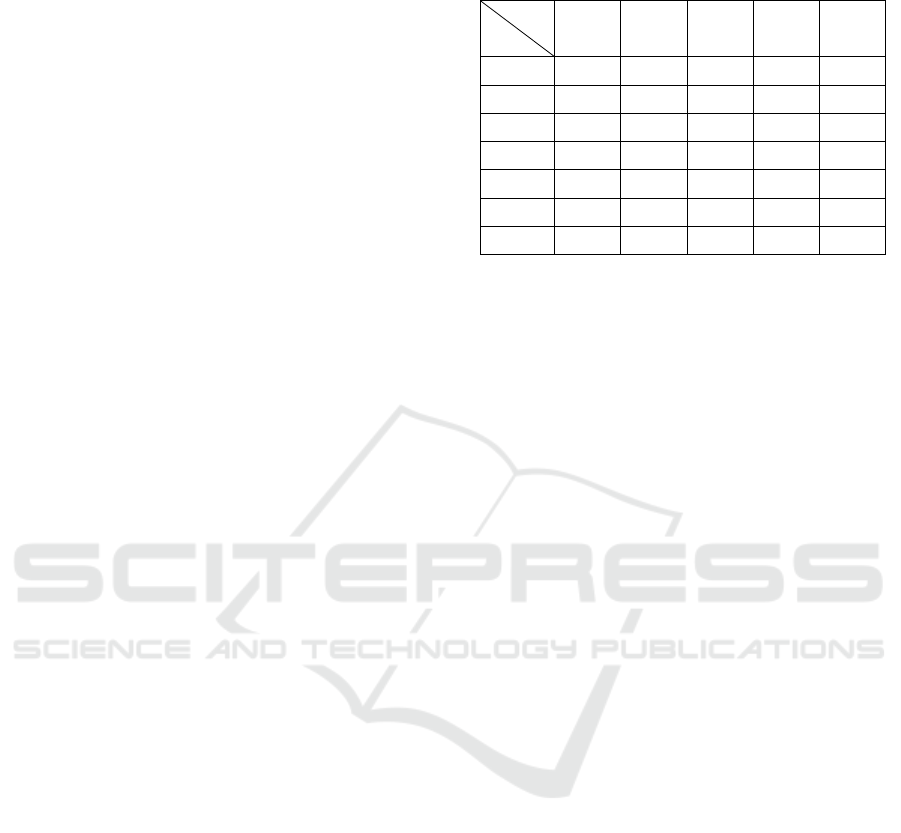
Figure 2 shows a representation of the scarce
amount of data captured by commercial devices every
(a) 24 hours of animal activity.
(b) Commercial data recording.
Figure 2: Commercial information gathering in a 30
minutes time window.
time window of 30 minutes. In Figure 2a, animal
movement in the Z axis over 24 hours is represented
in blue. In Figure 2b, a time window of 30 minutes
is enlarged for displaying through red lines the time
while the accelerometer reads the status of the device.
Therefore, the previous 29 minutes and 30 seconds
animal behavior cannot be analyzed, being this issue
the major cause of this study.
Therefore, the main goal of this study is to
improve the quality of the information collected
by the accelerometers of Digitanimal commercial
devices respecting the constraints imposed by Sigfox
technology and the expected battery life. For this
purpose, a new strategy is defined to represent the
time series obtained from CM devices with the
highest possible accuracy.
3 METHODOLOGY
In order to achieve the improvement in the
representation of accelerometer time series sought in
this study, a solution based in SAX is proposed and
evaluated against the current operation mode of the
devices. In this section, the proposed as well as the
commercial solutions are explained in detail.
The main idea behind the evaluation of all
the solutions is based on the assumption that data
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
528
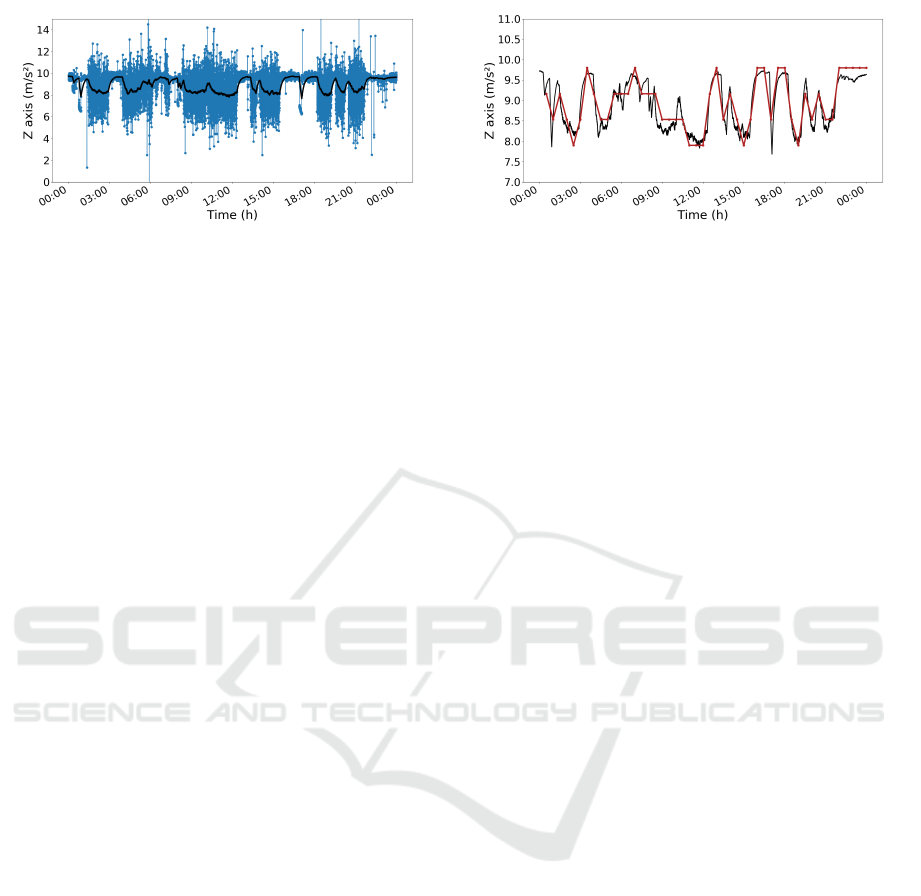
Figure 3: Application of exponential smoothing to the
continuous measurement signal.
collected through CM devices is a close enough
approximation to the real animal behavior. However,
prior to applying any solution to the CM data, it is
necessary to reduce its noise.
Figure 3 shows the application of an exponential
smoothing to the raw CM signal. The transformed
signal is represented through the black curve while
the blue one is the raw data.
3.1 Commercial Solution
With the current commercial solution (CS), the device
turns on automatically every 30 minutes and reads its
status through its sensors. Firstly, the GPS position
and surface temperature are stored to be included
in the final message. Then, the accelerometer
takes several measurements of its position during a
time window of 30 seconds at a time rate of 100
milliseconds.
These 300 measurements are used to compute the
AVG, SD and EX variables of the signal within those
30 seconds after applying a low-pass filter. Finally,
all these values are sent in a message to the servers
of the company using the following distribution of
bits per variable: 6 bits for AVG, 6 bits for SD and
4 bits for EX. As only one measurement is sent per
message, each amount of bits can be used to codify
the information in different possible values following
the relation stated in Equation 1.
Possiblevalues = 2
Number o f bits
(1)
Therefore, this bits distribution means that each
variable (AVG, SD and EX) is discretized in 64, 64
and 16 different possible values, respectively. These
values are computed in an equidistant way within a
range from -2g to 2g, being g the gravity acceleration.
Figure 4 shows the AVG variable of a commercial
signal constructed from the smoothed CM signal. The
red curve represents the commercial one while the
smoothed CM signal is represented in black color.
Each value of the commercial signal is computed
Figure 4: Commercial signal representation for 24 hours.
through the average value of measurements within a
time window of 30 seconds. Therefore, each one of
these values is the average of 6 CM values.
3.2 Proposed Solution
The proposed solution, SAX solution (SS), is
an approach based in the representation technique
explained in Section 2. This solution takes into
account the constraints introduced by Sigfox in order
to define different possible parameter combinations
of number of levels and equi-length sections for
each variable maintaining the current bit distribution
adopted by Digitanimal. For each combination of
parameters, the amount of available bits will limit
the possible number of levels and sections. Besides
this limitation in the amount of bits per axis and
variable, this study does not consider combinations of
two levels as they reduce excessively the information
sent.
Hence, this solution independently determines
different parameter combinations for the
representation of the AVG, the SD and the EX
variables. As a result, 18 different possible
combinations of levels and sections for each axis are
evaluated. In this work, α and β stand for the levels
and sections of the SS representation. Table 2 shows
some of the final possible combinations considered
(for a full view of these combinations see Appendix).
Once defined all the possible combinations, the
first step of the solution is the determination of the α
levels. Then, two different approaches are considered
for their computation: equiprobable and equidistance
levels. The normalization of the smoothed CM signal
is required for the division in equiprobable levels. On
the contrary, equidistance levels are computed in the
same way as in the CS.
In the next step, β values are computed within
time windows of 30 minutes. These values are
computed through the mean, standard deviation or
maximum excursion depending on the variable to be
constructed. Then, each β value is mapped to α
New Commercial Representation for Cattle Information Gathering
529
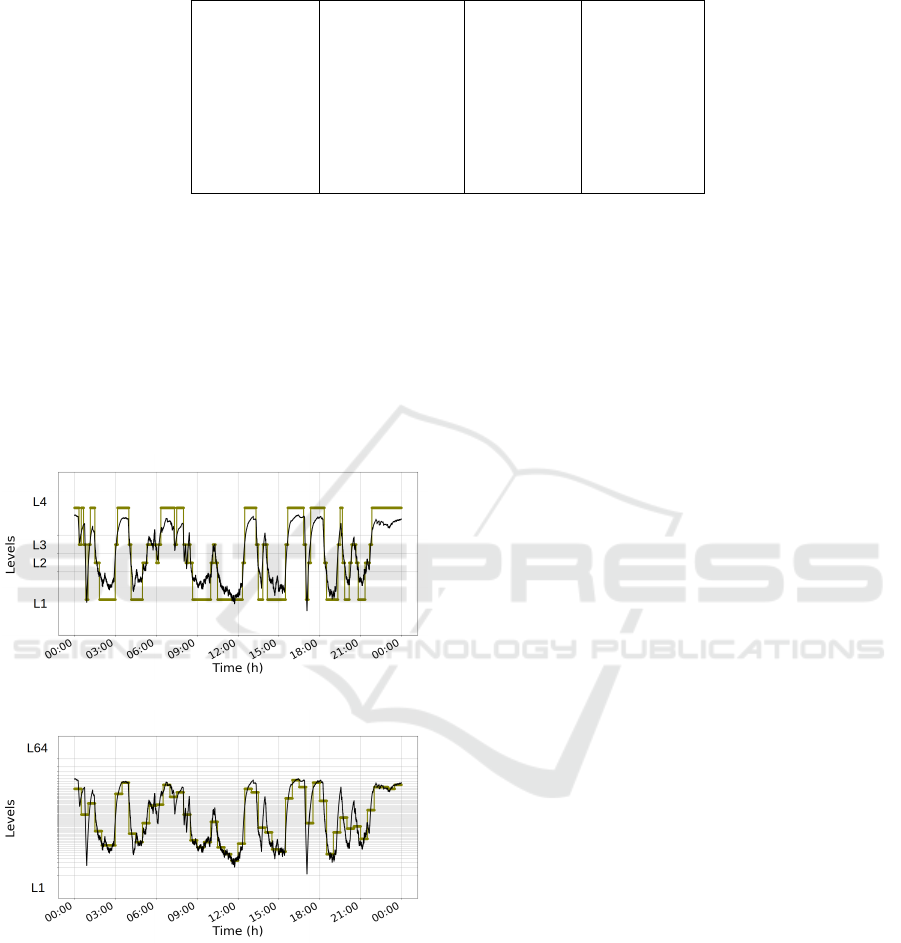
Table 2: SAX Solution (SS) combinations of levels (α) and sections (β) for average (AVG), standard deviation (SD) and
maximum excursion (EX) variables.
Combination AV G
α
AV G
β
SD
α
SD
β
EX
α
EX
β
SS
13
64 1 4 3 4 2
SS
14
64 1 4 3 16 1
SS
15
64 1 8 2 4 2
SS
16
64 1 8 2 16 1
SS
17
64 1 64 1 4 2
SS
18
64 1 64 1 16 1
levels giving shape to the transformed signal. The
defined procedure is applied using every possible
combination specified in Table 4 as parameters.
Figure 5 serves as an example of the application
of two possible combinations of this procedure to the
CM data for representing the AVG variable. Black
curves represent the smoothed CM signal, while
the green ones are the transformed signal for the
combinations of 4 levels and 3 sections and 64 levels
and 1 section.
(a) α: 4 | β: 3
(b) α: 64 | β: 1
Figure 5: SAX solution applied to two of the possible level
and section combinations.
4 EXPERIMENTAL RESULTS
In order to select the best representation for cattle
information gathering, data from 8 different animals
was captured for 15 days in a row. Hence, a total of
120 different CM daily time series are reconstructed
using each one of the solutions proposed and
compared with the original signal in order to select
the optimal solution.
Next, the strategy for the performance
measurement, different related problems and the
final results achieved, are presented.
4.1 Performance Evaluation
For the sake of comparison, each solution is evaluated
following the same performance evaluation method.
The CM signal, splited in time windows of 30
minutes, is used as the reference signal. Thus, the
accuracy of each representation is determined through
its Euclidean distance to the reference signal. For
that matter, as values of the reconstructed signals are
based on some predefined levels, each point of the
CM signal is compared with the middle point of the
corresponding level. Notice that, the CM devices
capture data in time rates of 5 seconds. Thus, every
CM time series contains 48 time windows of 30
minutes made up of 360 points.
To illustrate this process, Figure 6 presents an
example of the error calculation for a 30 minutes
time window between the SS combination of 4 levels
and 3 sections, and the CM signal. For visualization
purposes, the number of points represented for the
CM signal have been reduced to just a 10% of the
original amount. Therefore, just 36 points from
the original 360 has been represented, 12 points per
section. In this case, the error is calculated as the sum
of the Euclidean distances between the CM points and
the SS levels.
The estimation of the representation error implies
two different problems. First, the definition of a
reference signal to evaluate the reconstruction of SD
and EX for each solution. Next, the determination of
the middle point for the first and last levels, in the
proposed representations.
Notice that, in order to evaluate the accuracy of the
AVG variable reconstruction, the original CM values
can be directly used as reference signal. However,
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
530

Figure 6: Error calculation within 30 minutes time intervals.
CM signal in black, SS representation in green.
when dealing with SD and EX, new time series are
necessary to compute the Euclidean distance. In this
work, we propose to generate these time series as
follows: SD and EX references are computed per time
windows of 10 minutes from the original CM signal.
Thus, final signals of 3 points each 30 minutes (that is
144 points per time series), are used in the evaluation.
The problem of determining the middle point of
first and last levels arise because these levels cover
from −∞ to the first breakpoint and from the last
breakpoint to +∞. Therefore, choosing their middle
points is not a straightforward decision. To illustrate
the proposed procedure, Figure 7 explains how these
middle points are selected for a SS combination of 4
levels. The 3 breakpoints needed to define the 4 levels
are represented by vertical lines over the Gaussian
distribution. These breakpoints correspond to the first
(Q1) , second (median, Q2) and third (Q3) quartiles
of the Gaussian distribution. Notice that the second
middle point (mp
2
) is related to Q1 and Q2, and it is
calculated as follows:
mp
2
=
1
2
(Q2 − Q1) (2)
In the same way, the third middle point (mp
3
) is
related to the second and third quartiles:
mp
3
=
1
2
(Q3 − Q2) (3)
First (mp
1
) and fourth (mp
4
) middle points are
related to Q1, Q3 and the interquartile range (IQR)
defined as the difference between Q3 and Q1. Thus,
given a boxplot, the middle points for first and last
levels are the midpoint between the box and whiskers
given that further values can be considered outliers.
The lower whisker is defined by Q1 − 1.5IQR. Then,
the middle point of the first level is obtained as
follows:
mp
1
= Q1 −
Q1 − (Q1 − 1.5IQR)
2
= Q1 −
3
4
IQR
(4)
Figure 7: Middle point selection for extreme levels.
In the same way, the upper whisker is defined by
Q3 + 1.5IQR. Thus, the middle point of the last level
is obtained as follows:
mp
4
= Q3 +
(Q3 + 1.5IQR) − Q3
2
= Q3 +
3
4
IQR
(5)
4.2 Final Results
Once the procedure for error calculation has been
defined, the final results are computed through the
average error for each one of the 120 available time
series. As the AVG is fixed for the cattle domain
experts as the most relevant variable, a weighted
average is used for the global error calculation. The
final error per time series representation is computed
using weights proposed by domain experts as follows:
error = 0.4 · ε
avg
+ 0.3 · ε
sd
+ 0.3 · ε
ex
(6)
Table 3 presents the error results (per axis) for the
six best SS solutions and for the CS representation
(see the Appendix for a complete table with all the
results). The best overall results are obtained for the
combination SAX
15
(see Table 4 in the Appendix for
the definition of this combination). Regarding the CS
solution, error reductions of 31%, 68% and 31% are
achieved for x, y and z axis, respectively, when the
proposed best solution is used.
Figure 8 shows an example of this improvement
for one of the 120 time series. It can be seen that the
SAX solution fits the original CM signal. In addition,
it is possible to detect situations when the CS solution
underfit the CM signal. For instance, at time 10 : 30.
In general, the CS solution seems more sensitive to
abrupt changes in the original signal, than the SAX
solution.
New Commercial Representation for Cattle Information Gathering
531
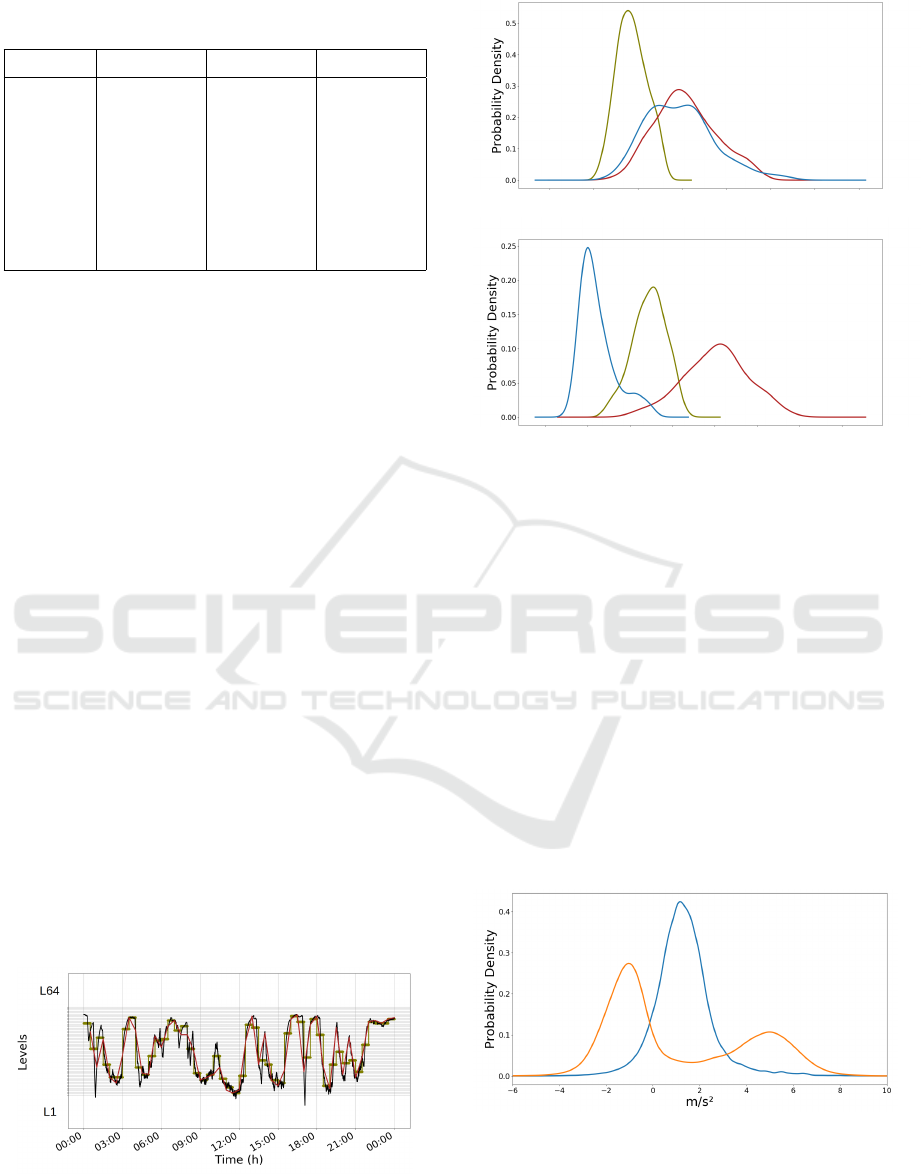
Table 3: Average and standard deviation error rates per axis
for best solutions.
Solution ¯x
error
¯y
error
¯z
error
CS 3.99±0.52 8.72±1.50 3.56±0.41
SS
13
2.79±0.27 2.88±0.85 2.51±0.26
SS
14
3.15±0.34 3.12±0.92 2.79±0.33
SS
15
2.75±0.27 2.82±0.86 2.45±0.27
SS
16
3.11±0.34 3.06±0.93 2.74±0.34
SS
17
2.79±0.28 2.84±0.86 2.48±0.28
SS
18
3.15±0.35 3.09±0.93 2.77±0.36
5 DISCUSSION
The proposed solution for the representation of
cattle information is a valuable alternative to the
current operation mode of devices and, thus, an
improvement in the quality of cattle information
gathering. However, further analysis has been done
revealing that there is still room for improvement.
Figure 9 shows the Probability Density Functions
(PDF) of the errors computed for the AVG variable
in axis X and Y. For the first case (X axis), the best
combination (lower errors) is the combination of 64
levels and 1 section for equidistant levels. For the Y
axis, the best combination is the combination of 64
levels and 1 section for equiprobable levels.
This issue is explained through Figure 10. The
blue curve represents the PDF of the measurements
recorded by one of the devices during the 15 days
of the experiment in the X axis, while the orange
one represents the measurements recorded in the
Y axis. Notice that the X axis presents an uni-
modal distribution, that is, a unique type of behavior
is detected. However, the Y axis shows a bi-
modal distribution, that is, two type of behaviors
are presented. This fact is the main reason why
the equiprobable distribution of levels represents in
a more accurate way the animal behavior.
Figure 8: Current and proposed solutions performance
comparison. Black curve represents the original CM signal,
while the red one is the CS and the green one is the SAX
15
combination.
(a) X axis.
(b) Y axis.
Figure 9: Probability density functions for error rates in
AVG. Red represents the errors for the CS, while green
and blue are the combinations of 64 levels and 1 section
for equidistant and equiprobable levels, respectively.
As in any Data Science project, the proposed
methodology and the obtained results has been
presented and explained to the experts of the domain.
Digitanimal experts’ opinion is that the animal
position with a fewer density seen in Figure 10 for
the Y axis can be associated to grazing animals.
These insights, as others related to different patterns
in animal behavior, can be used to new definitions
of equiprobable and equidistance levels. Some
animal movements could be explained in a more
accurate way if these levels are validated by experts
considering abnormal behavior situations.
Figure 10: PDF of the X and Y axis, recorded by one of the
devices during the 15 days of the experiment.
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
532

6 CONCLUSIONS
In this work, a novel strategy based in SAX is
proposed to improve the representation of cattle
information gathering through WSNs. As the study
has been promoted within the Digitanimal project,
different insights and requirements from the company
has been considered to define the solution.
The proposed approach is based on the SAX
representation technique. Different combinations
for the parameters of the SAX representation have
been evaluated, and compared with the current
company solution, through a common procedure for
the estimation of the error. Major improvements have
been achieved.
Besides, the present study is the first step towards
the development of higher quality services for the
company. A better accuracy in the representation
of animal behavior could improve real-time problem
detection such as animal calvings or heats.
Next steps and future work will imply different
tasks related to the validation of these results, using
more animals and more days, and development of
new possible strategies. In order to verify the
results achieved in this work, devices programmed
with the proposed solution will be used in future
studies. This task should be done in collaboration
with the company and experimental farms that
allow the new stage of information gathering. On
the other hand, devise of new strategies can be
done expanding the study by introducing different
amount of bits per axis and variables, by using
different representation techniques or even by using
alternative levels definitions. In this way, the Trend
Segmentation Algorithm (Siordia et al., 2011), the
Trend Feature Symbolic Aggregate approXimation
(Yu et al., 2019) or the Fast Low-cost Online
Semantic Segmentation (Gharghabi et al., 2019)
could be considered.
ACKNOWLEDGEMENTS
Research supported by grants from Madrid
Autonomous Community (Ref: IND2018/TIC-
9665) and European Union’s H2020 Research and
Innovation Program, through the IoF2020 project
(H2020-IoT-2016) under subgrant agreement no.
2282300206-UC010. Special thanks to MISC
International S.L.
REFERENCES
Akyildiz, I. F., Su, W., Sankarasubramaniam, Y., and
Cayirci, E. (2002). Wireless sensor networks: a
survey. Computer networks, 38(4):393–422.
Berndt, D. J. and Clifford, J. (1994). Using dynamic time
warping to find patterns in time series. In KDD
workshop, volume 10, pages 359–370. Seattle, WA.
Brezmes, T., Gorricho, J.-L., and Cotrina, J. (2009).
Activity recognition from accelerometer data on a
mobile phone. In International Work-Conference on
Artificial Neural Networks, pages 796–799. Springer.
CattleChain (2019). Cattlechain, 2019. https://www.
cattlechain.eu/.
Chan, K.-P. and Fu, A. W.-C. (1999). Efficient time
series matching by wavelets. In Proceedings 15th
International Conference on Data Engineering (Cat.
No. 99CB36337), pages 126–133. IEEE.
Chen, L. and Ng, R. (2004). On the marriage of lp-norms
and edit distance. In Proceedings of the Thirtieth
international conference on Very large data bases-
Volume 30, pages 792–803. VLDB Endowment.
Digitanimal (2019). Digitanimal, 2019. https://www.
digitanimal.com/.
Diosdado, J. A. V., Barker, Z. E., Hodges, H. R.,
Amory, J. R., Croft, D. P., Bell, N. J., and Codling,
E. A. (2015). Classification of behaviour in housed
dairy cows using an accelerometer-based activity
monitoring system. Animal Biotelemetry, 3(1):15.
Duarte-Melo, E. J. and Liu, M. (2002). Analysis of energy
consumption and lifetime of heterogeneous wireless
sensor networks. In Global Telecommunications
Conference, 2002. GLOBECOM’02. IEEE, volume 1,
pages 21–25. IEEE.
Faloutsos, C., Ranganathan, M., and Manolopoulos, Y.
(1994). Fast subsequence matching in time-series
databases, volume 23. ACM.
Gharghabi, S., Yeh, C.-C. M., Ding, Y., Ding, W., Hibbing,
P., LaMunion, S., Kaplan, A., Crouter, S. E., and
Keogh, E. (2019). Domain agnostic online semantic
segmentation for multi-dimensional time series. Data
mining and knowledge discovery, 33(1):96–130.
Keogh, E., Chakrabarti, K., Pazzani, M., and Mehrotra, S.
(2001). Dimensionality reduction for fast similarity
search in large time series databases. Knowledge and
information Systems, 3(3):263–286.
Korn, F., Jagadish, H. V., and Faloutsos, C. (1997).
Efficiently supporting ad hoc queries in large datasets
of time sequences. In Acm Sigmod Record, volume 26,
pages 289–300. ACM.
Larsen, R. J., Marx, M. L., et al. (1986). An introduction to
mathematical statistics and its applications, volume 2.
Prentice-Hall Englewood Cliffs, NJ.
Lin, J., Keogh, E., Lonardi, S., and Chiu, B. (2003).
A symbolic representation of time series, with
implications for streaming algorithms. In Proceedings
of the 8th ACM SIGMOD workshop on Research
issues in data mining and knowledge discovery, pages
2–11. ACM.
New Commercial Representation for Cattle Information Gathering
533
Lkhagva, B., Suzuki, Y., and Kawagoe, K. (2006).
Extended sax: Extension of symbolic aggregate
approximation for financial time series data
representation. DEWS2006 4A-i8, 7.
Martiskainen, P., J
¨
arvinen, M., Sk
¨
on, J.-P., Tiirikainen,
J., Kolehmainen, M., and Mononen, J. (2009).
Cow behaviour pattern recognition using a three-
dimensional accelerometer and support vector
machines. Applied animal behaviour science,
119(1-2):32–38.
Navarro, J., Diego, I. M. d., Fern
´
andez-Isabel, A.,
and Ortega, F. (2019). Fusion of gps and
accelerometer information for anomalous trajectories
detection. In Proceedings of the 2019 the 5th
International Conference on e-Society, e-Learning
and e-Technologies, pages 52–57. ACM.
Notaristefano, A., Chicco, G., and Piglione, F. (2013). Data
size reduction with symbolic aggregate approximation
for electrical load pattern grouping. IET Generation,
Transmission & Distribution, 7(2):108–117.
P
´
erez, P. C., Ortega, F., Garc
´
ıa, J. N., and Diego, I. M. d.
(2019). Combining machine learning and symbolic
representation of time series for classification of
behavioural patterns. In Proceedings of the 2019 the
5th International Conference on e-Society, e-Learning
and e-Technologies, pages 93–97. ACM.
Ravi, N., Dandekar, N., Mysore, P., and Littman, M. L.
(2005). Activity recognition from accelerometer data.
In Aaai, volume 5, pages 1541–1546.
Sigfox (2019). Sigfox, 2019. https://www.sigfox.com/.
Siordia, O. S., de Diego, I. M., Conde, C., and
Cabello, E. (2011). Combining traffic safety
knowledge for driving risk detection. In 2011
14th International IEEE Conference on Intelligent
Transportation Systems (ITSC), pages 564–569.
IEEE.
Tan, L. and Wang, N. (2010). Future internet: The internet
of things. In 2010 3rd international conference
on advanced computer theory and engineering
(ICACTE), volume 5, pages V5–376. IEEE.
Vlachos, M., Kollios, G., and Gunopulos, D. (2002).
Discovering similar multidimensional trajectories. In
Proceedings 18th international conference on data
engineering, pages 673–684. IEEE.
Yu, Y., Zhu, Y., Wan, D., Zhao, Q., and Liu, H. (2019).
A novel trend symbolic aggregate approximation for
time series. arXiv preprint arXiv:1905.00421.
APPENDIX
Table 4: SAX Solution (SS) combinations of levels (α) and
sections (β) for AVG, SD and EX variables.
Comb. AV G
α
AV G
β
SD
α
SD
β
EX
α
EX
β
SS
1
4 3 4 3 4 2
SS
2
4 3 4 3 16 1
SS
3
4 3 8 2 4 2
SS
4
4 3 8 2 16 1
SS
5
4 3 64 1 4 2
SS
6
4 3 64 1 16 1
SS
7
8 2 4 3 4 2
SS
8
8 2 4 3 16 1
SS
9
8 2 8 2 4 2
SS
10
8 2 8 2 16 1
SS
11
8 2 64 1 4 2
SS
12
8 2 64 1 16 1
SS
13
64 1 4 3 4 2
SS
14
64 1 4 3 16 1
SS
15
64 1 8 2 4 2
SS
16
64 1 8 2 16 1
SS
17
64 1 64 1 4 2
SS
18
64 1 64 1 16 1
Table 5: Average and standard deviation error rates per axis.
Solution ¯x
error
¯y
error
¯z
error
CS 4.00±0.52 8.72±1.50 3.56±0.41
SS
1
61.34±8.53 4.06±0.37 6.85±2.78
SS
2
61.70±8.52 4.31±0.40 7.13±2.79
SS
3
61.31±8.53 4.01±0.37 6.80±2.78
SS
4
61.67±8.52 4.25±0.41 7.08±2.80
SS
5
61.35±8.53 4.03±0.37 6.82±2.79
SS
6
61.71±8.52 4.27±0.41 7.11±2.81
SS
7
14.55±3.33 4.27±1.12 6.84±2.76
SS
8
14.91±3.34 4.52±1.14 7.12±2.77
SS
9
14.51±3.34 4.22±1.12 6.79±2.76
SS
10
14.87±3.34 4.46±1.14 7.07±2.78
SS
11
14.55±3.34 4.24±1.13 6.81±2.77
SS
12
14.91±3.34 4.48±1.15 7.10±2.78
SS
13
2.79±0.27 2.88±0.85 2.51±0.26
SS
14
3.15±0.34 3.12±0.92 2.79±0.33
SS
15
2.75±0.27 2.82±0.86 2.45±0.27
SS
16
3.11±0.34 3.06±0.93 2.74±0.34
SS
17
2.79±0.28 2.84±0.86 2.48±0.28
SS
18
3.15±0.35 3.09±0.93 2.77±0.36
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
534
