
Integrating golog++ and ROS
for Practical and Portable High-level Control
Maximillian Kirsch, Victor Matar
´
e
a
, Alexander Ferrein
b
and Stefan Schiffer
c
Mobile Autonomous Systems and Cognitive Robotics Institute (MASCOR),
FH Aachen University of Applied Sciences, Eupener Str. 70, 52066 Aachen, Germany
Keywords:
Reasoning about Action and Change, GOLOG, Robot Operating System, ROS.
Abstract:
The field of Cognitive Robotics aims at intelligent decision making of autonomous robots. It has matured over
the last 25 or so years quite a bit. That is, a number of high-level control languages and architectures have
emerged from the field. One concern in this regard is the action language GOLOG. GOLOG has been used in
a rather large number of applications as a high-level control language ranging from intelligent service robots
to soccer robots. For the lower level robot software, the Robot Operating System (ROS) has been around
for more than a decade now and it has developed into the standard middleware for robot applications. ROS
provides a large number of packages for standard tasks in robotics like localisation, navigation, and object
recognition. Interestingly enough, only little work within ROS has gone into the high-level control of robots.
In this paper, we describe our approach to marry the GOLOG action language with ROS. In particular, we
present our architecture on integrating golog++, which is based on the GOLOG dialect Readylog, with the
Robot Operating System. With an example application on the Pepper service robot, we show how primitive
actions can be easily mapped to the ROS ActionLib framework and present our control architecture in detail.
1 INTRODUCTION
In mobile robotics, the recent years have been marked
by notable progress in recognition, manipulation and
planning algorithms. The advent of robotics frame-
works and middlewares has caused a consolidation
of software stacks, with the Robot Operating System
(ROS) emerging as the de-facto standard. The most
noteworthy achievement of ROS is the growth of a
lively community that shares re-usable components
with well-defined interfaces.
The field of high-level control, however, has not
seen the same amount of technical consolidation, over
time leading to a disconnect between the ROS world
and the Cognitive Robotics community. Of the many
existing high-level action and planning languages,
there exists only the ROSPlan package (Cashmore
et al., 2015) in ROS which uses PDDL (McDermott
et al., 1998; McDermott, 2000) as the declarative in-
put language. While having PDDL readily available
is certainly very valuable, we do believe that a purely
planning-based approach is not necessarily the best
a
https://orcid.org/0000-0003-4606-4758
b
https://orcid.org/0000-0002-0643-5422
c
https://orcid.org/0000-0003-1343-7140
choice for every real-world robotics problem. How-
ever, within the ROS ecosystem, the only other op-
tions for high-level control are based on finite au-
tomata (Bohren and Cousins, 2010; Brunner et al.,
2016), which makes them more of a complement to
PDDL than an alternative.
One approach that sits precisely in-between purely
declarative problem description (planning) and im-
perative behavior prescription (like finite automata)
is GOLOG (Levesque et al., 1997; Reiter, 2001). It
allows for combining classical imperative program-
ming constructs with more exotic constructs like
the non-deterministic choice of action and argument.
One feasible architecture is, for example, having a
GOLOG agent play the role of an executive below a
PDDL-based planner. Another option with some di-
alects of GOLOG is to have decision-theoretic plan-
ning integrated in the GOLOG interpreter itself. Dif-
ferent practical applications in robotics have shown
that really any permutation of the three approaches
can be suitable, depending on the domain require-
ments. High-level controllers based on Golog have
been used for various domains such as robotic soc-
cer (Ferrein and Lakemeyer, 2008) or domestic ser-
vice robotics (Schiffer et al., 2012).
692
Kirsch, M., Mataré, V., Ferrein, A. and Schiffer, S.
Integrating golog++ and ROS for Practical and Portable High-level Control.
DOI: 10.5220/0008984406920699
In Proceedings of the 12th International Conference on Agents and Artificial Intelligence (ICAART 2020) - Volume 2, pages 692-699
ISBN: 978-989-758-395-7; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

In this paper, we want to focus on the GOLOG
language family and propose an interface that makes
it a first-class citizen of the ROS world. Since our
golog++-ROS interface aims to do for GOLOG what
ROSPlan does for PDDL, there are some functional
similarities, but also significant differences in non-
functional requirements and the technical realization.
We start with some background, history and mo-
tivation for the development of golog++ in Sec-
tion 2 before we review related approaches in other
high-level languages in Section 3. Next, we give
an overview of the central ideas behind golog++
in Section 4. In Section 5 we describe the interface
between ROS and golog++ both from an abstract
and an implementation-oriented perspective. We con-
clude with a discussion of the results and future work
in Section 6.
2 BACKGROUND
Interfacing to some kind of execution platform is ob-
viously an issue that all high-level agent languages
have to deal with. In the following, we will give an
overview over the most important concepts and the
history of the GOLOG language family. Since we
want to focus on ROS in this paper, we continue with
a short introduction to its most relevant ideas and con-
cepts, in particular those that cater to agent languages.
2.1 The GOLOG Language Family
All GOLOG dialects, including the original one
(Levesque et al., 1997) have in common that they have
a formal semantics based on the Situation Calculus
(McCarthy, 1963; McCarthy and Hayes, 1969). The
Situation Calculus is a second order logical language
with equality which allows for reasoning about ac-
tions and their effects. The world evolves from situa-
tion to situation due to actions, starting in an initial sit-
uation S
0
. Possible world histories are represented by
sequences of actions. Properties of the world which
can change from situation to situation are stored in so-
called fluents, predicates or functions with a situation
term as their last argument. Each action has precon-
ditions and effects that formalize when it is possible
to execute the action and how this action will change
the world with regard to fluents. A basic action theory
(BAT) contains axioms about the initial situation, ac-
tion precondition axioms and successor state axioms
as well as unique names and some additional founda-
tional axioms.
GOLOG combines the declarative approach of the
Situation Calculus with imperative programming, of-
fering constructs such as loop and conditionals known
from imperative programming languages. Many
dialects also support less standard constructs such
as concurrent program execution, nondeterministic
choice or decision-theoretic planning. The purpose
of the nondeterministic constructs is to generate the
search space for a planning operator which can thus
be used not only to search the entire action space,
but to search for an executable parameterization of
a nondeterministic program. Additionally, an agent
must be able to perform both active and passive sens-
ing, i.e. to actively execute an action to acquire new
knowledge about its environment (Lakemeyer, 1999)
(e.g. using sensors), and to passively receive new
knowledge (i.e. react to uncontrollable events like the
press of a button on the robot) (De Giacomo et al.,
1997). Noteworthy about active sensing (i.e. sensing
actions) is that their sensed effect is unknown during
planning—only when the action is actually being ex-
ecuted will the agent’s knowledge be updated. Pas-
sive sensing—a background update of fluents when-
ever a sensor value has changed in the world—is of
course also unplannable by definition, and is usually
modelled by so-called exogenous actions. These are
actions that are beyond the control of the agent, but
update its internal knowledge about the world.
In practical robotics, actions are not normally
completed instantaneously. This is reflected in the
concept of durative actions (Reiter, 1996), which in-
troduces instantaneous actions that mark the begin
and end of an ongoing activity. This also allows the
agent to do other things (e.g. plan) while a physical
action is in progress.
Many different GOLOG dialects have been pro-
posed. CONGOLOG (De Giacomo et al., 1997) im-
plements exogenous actions, interrupts and the abil-
ity execute actions concurrently, and INDIGOLOG
(De Giacomo and Levesque, 1999; De Giacomo
et al., 2009) expands on that allowing for incremen-
tal planning. DTGOLOG (Boutilier et al., 2000) in-
troduces decision-theoretic planning, i.e. the abil-
ity to generate plans that are optimized with re-
gard to some reward function. READYLOG (Ferrein,
2010b; Ferrein and Lakemeyer, 2008) builds upon
that base and integrates features from CCGOLOG and
PGOLOG (Grosskreutz, 2002; Grosskreutz and Lake-
meyer, 2000) to handle actions with uncertain out-
comes and fluents that change continuously.
While most of the GOLOG-related research deals
with language semantics, practical use has shown that
the issue of interfacing with and executing actions
on a real robot is also not entirely trivial. GOLEX
(H
¨
ahnel et al., 1998) is one of the first developments
that identified some important interfacing issues: The
Integrating golog++ and ROS for Practical and Portable High-level Control
693

Level of Abstraction in GOLOG is generally too high
to directly map primitive GOLOG actions to direc-
tives for robot actuators. Execution Monitoring is
needed, since in reality actions can fail for many rea-
sons beyond the control and/or scope of the agent pro-
gram. To enable Sensing and interaction, the lan-
guage semantics actually had to be extended (Lake-
meyer, 1999). It was also determined that some re-
source management system is required “since certain
resources such as motors cannot be shared simultane-
ously”. At that time, GOLEX did not support parallel
actions; so it was not able to react to user inputs, say,
while the robot was travelling.
2.2 The Robot Operating System (ROS)
ROS (Quigley et al., 2009) is an open-source middle-
ware designed for robotic application development.
It offers fundamental concepts and tools to manage
distributed robot applications, as well as ready-to-use
packages for common problems such as localization,
navigation, vision, motion etc.
Its fundamental architecture is a loosely coordi-
nated, network-transparent multi-process system. In-
dividual components are called nodes, and they com-
municate asynchronously by publishing messages un-
der a so-called topic. Topics have a specific message
type and are organized within a namespace. To re-
ceive messages, a node subscribes to a certain topic,
after which it will receive all messages published un-
der that topic. To support synchronous communica-
tion, there are so-called services which employ a re-
quest/response pattern.
This fundamental architecture has caused a leap
forward in robotics research by fostering a commu-
nity that can easily exchange software components
with clearly defined interfaces.
2.3 ROS ActionLib
The ROS ActionLib
1
is an execution monitoring in-
terface in the sense of (H
¨
ahnel et al., 1998). Client
and server communicate over action-specific mes-
sages that define a goal,
2
a feedback and a result.
To execute an action with certain arguments, an Ac-
tionClient sends a GoalMessage to a specific Action-
Server. The action server is then responsible for ex-
ecuting the action with the given goal, tracking its
progress (possibly giving feedback), and finally no-
tifying the client if and when the goal has succeeded
1
http://wiki.ros.org/actionlib
2
Note that the term goal here has nothing to do with
the goal concept in the context of a planning system. No
reasoning is involved at this level.
or was aborted, possibly along with some data as a
result. For example, an action server can provide the
action to move the robot from position A to B. The
goal parameters could be the (x, y) coordinates the
robot has to reach. As feedback, the action server
could then, for instance, periodically notify the client
about the current position, or it could simply give an
estimated percentage driven of the planned trajectory.
While the robot is on its way, the state of the goal is
running. A running goal can be canceled, whereupon
the action server stops the execution and the status
of the goal is set to preempted. When the movement
stops, the action server notifies the client with the fi-
nal state (succeeded, preempted or aborted), possibly
along with the final position.
All actions can be started in blocking or non-
blocking mode. In the former case, the action client
simply performs a function call which returns when
the action server is done with execution, or in the lat-
ter case, the function dispatching a goal returns im-
mediately, and the end of action execution is signalled
with a callback.
3 OTHER RELATED WORK
ROSoClingo (Andres et al., 2013; Gebser et al., 2011)
is one example of an action language that leverages
the ROS ActionLib. It interfaces to the ROS Action-
Lib through two topics, one for output (i.e. executing
actions) and one for input (i.e. action feedback/results
and sensing). These two topics have to be subscribed
to by special adapter nodes that translate the ROSo-
Clingo-specific messages into ROS ActionLib goals.
Another noteworthy work is the framework ROS-
Plan (Cashmore et al., 2015) which embeds the ac-
tion language PDDL (Fox and Long, 2011) into the
ROS system. ROSPlan provides an interface to exe-
cute the planned actions of PDDL on a robot running
ROS. Therefore, a dispatcher component holds the in-
formation of the next planned PDDL action to be ex-
ecuted, but it is up to the developer how the planned
action should be executed in ROS. One of the reasons
for this is that ROSPlan integrates several solvers that
can solve a planning problem. A ROSPlan GitHub
software repository demonstrates the execution of the
planned action on a robot platform with the ROS Ac-
tionlib.
The so-called Cognitive Robot Abstract Machine
3
(CRAM) (Beetz et al., 2010) is another agent de-
velopment framework that uses the Actionlib to in-
terface with ROS. It targets robots in everyday (e.g.
3
https://ias.in.tum.de/research/cram
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
694

domestic) environments, with a focus on integrat-
ing common-sense knowledge from multiple sources,
sharing (updated) knowledge between robots and
learning from past experience.
EXPCOG (Eppe et al., 2014) integrates several in-
dependent logic-based action calculi in one frame-
work. Among others, a STRIPS-like planning sys-
tem implemented in SWI-Prolog, an ASP-based on
OCLINGO and a situation calculus-based on GOLOG
and INDIGOLOG. However to our current knowledge
there is no straightforward ROS integration.
The work of (Adam et al., 2017) transforms
declarative expert domain models into PDDL prob-
lems. For this purpose, a Java interface must be im-
plemented for each robot that calls the functions of
the connected middleware. At the time of writing this
paper, there was however no publicly available ROS
integration.
4 THE golog++ FRAMEWORK
Most research about high-level control focuses on
language semantics, while architectural aspects such
as code reusability, portability and maintainability as
well as usability and ergonomics receive less atten-
tion. The golog++ framework offers an alternative
approach over other existing implementations that
takes such aspects into account. It extends previous
work on Golog such as YAGI or golog.lua (Ferrein,
2010a; Ferrein and Steinbauer, 2010; Ferrein et al.,
2012; Ferrein et al., 2016).
The main purpose of golog++ (Matar
´
e et al.,
2018) is to factor the concerns of execution/platform-
interfacing and static semantics out of the runtime se-
mantics. This clear separation of concerns helps to
significantly improve language usability, safety and
maintainability.
The runtime semantics can be implemented in dif-
ferent ways, e.g. by embedding an existing GOLOG
interpreter. With the ReadylogSemantics, golog++
supports both active and passive sensing, decision-
theoretic planning and concurrency. Furthermore
golog++ offers some unique features that are not
found in other GOLOG dialects:
• Code model: The C++ object model that forms
the core of golog++ supports all features re-
quired for an integrated development environ-
ment, i.e. full code introspection with reference
resolution.
• Type safety: Everything has a type, and inconsis-
tent use of types generates a specific error mes-
sage. Compound key-value types and list types
can be freely defined and nested.
symbol domain objects = {
stop_sign, bottle, traffic_light
}
symbol domain position = {
left, middle, right
}
string fluent sought_object() {
initially: () = null;
}
number fluent found_position() {
initially: () = null;
}
action dialog(string question) {
senses: sought_object()
}
action detect_position(symbol obj) {
senses: found_position()
}
action say(string say_str) {}
Figure 1: Exemplary BAT (defines a world and available
actions).
procedure main() {
dialog("What shall I search?");
if (sought_object() != null) {
start(say("Give me a second."));
detect_position(sought_object());
if (found_position() != null) {
say("The " + sought_object() + " is at the "
+ found_position() + " position.");
say("Thanks for your attention");
}
else
say("Sorry, I couldn’t find the "
+ sought_object());
}
else
say("Sorry, I didn’t understand.");
}
Figure 2: Exemplary imperative procedure that implements
a simple behaviour on top of the BAT in fig. 1. Some details
(like animations) are left out for conciseness.
• Syntax checking: golog++ comes with its own
syntax and a special parser, so the syntax is strict,
specific, and errors are pinpointed precisely.
In golog++, when a programmer defines an action
A(x), it is implicitly a durative action. That means
that in terms of classical GOLOG, A(x) actually de-
fines a primitive action start
A
(x) that begins some
activity, and another primitive action end
A
(x) that
waits for it to end.
The golog++ example program shown in Fig-
ures 1 & 2 demonstrates the use of durative actions
and active/passive sensing actions. The scenario can
be seen in Figure 3: The robot Pepper (Pandey and
Gelin, 2018) is standing in front of a table with a traf-
fic light, a bottle and a stop sign on it. Spectators can
swap the objects’ positions around, and then ask Pep-
per for the position of either one. This example does
not leverage golog++’s planning capabilities, but it
does serve to show that a simple AI demo application
can be written up with minimal effort.
In the next section, we will outline the underly-
ing infrastructure that enables this kind of high-level
behaviour development.
Integrating golog++ and ROS for Practical and Portable High-level Control
695

Figure 3: Interactive demo with Pepper at an event. Top:
Pepper listens to a spectator who names an object that Pep-
per should look for. Bottom: Pepper looks for the object on
the table and points out its position.
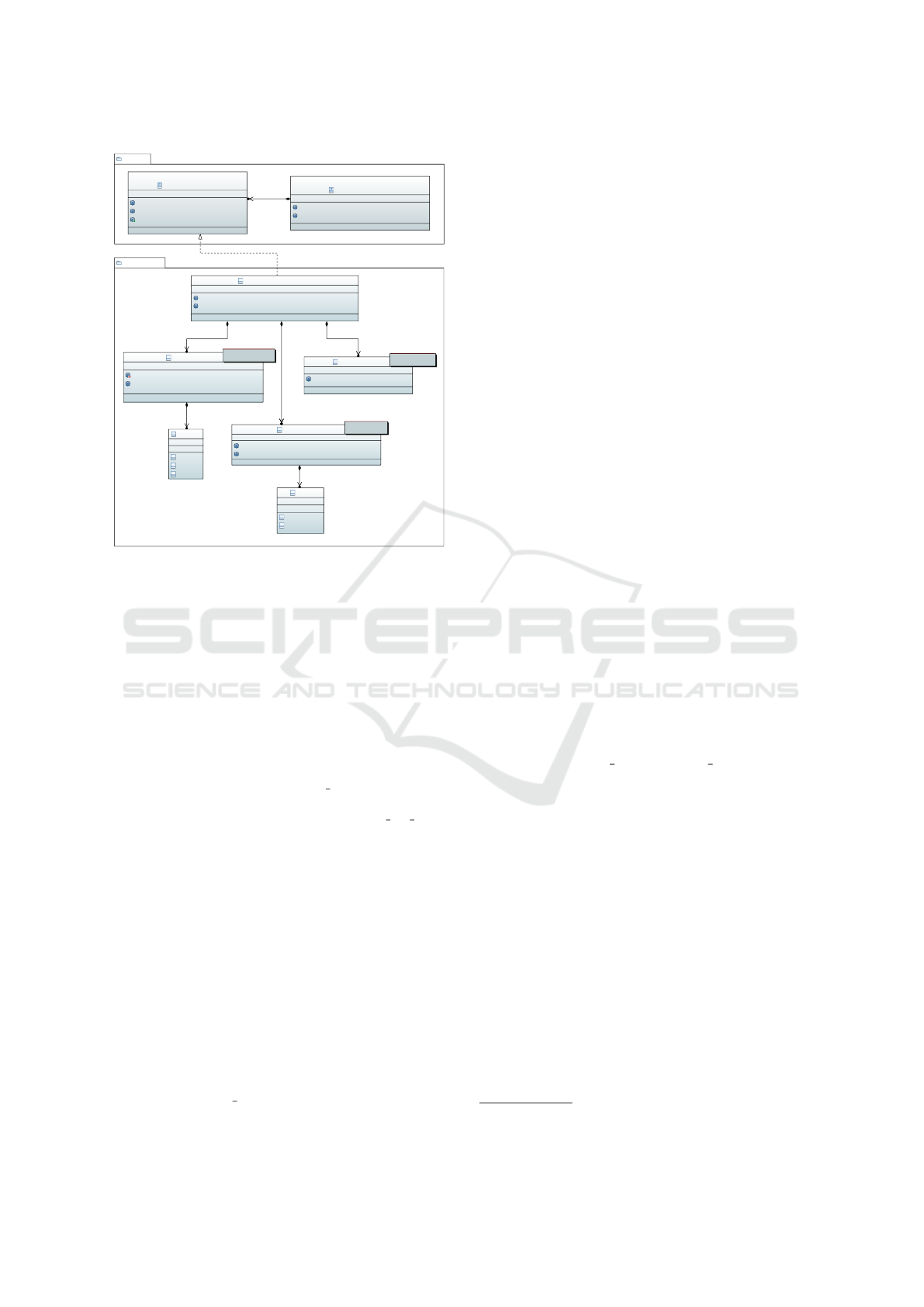
5 INTEGRATING golog++ AND
ROS
Since golog++ is designed to work with different
platforms, the PlatformBackend is an abstract inter-
face that requires a platform-specific implementation.
Its job is to map the durative actions, exogenous and
sensing actions in a golog++ program onto a cer-
tain robot platform. Figure 4 gives an overview which
functions the RosPlatformBackend has to implement.
As the names suggests, the function execute activity
is called when the agent decides to begin some ac-
tivity, and preempt activity is called when the agent
wants to cancel a currently ongoing activity. The
function update activity is already implemented in the
PlatformBackend and must be called by the RosPlat-
formBackend to set the state finish, fail or preempted,
and to (possibly) pass a sensing result when a running
activity terminates.
In the following, we describe how the require-
ments of executing actions concurrently and active/-
passive sensing can be satisfied with the ActionLib
stack and ROS core functionality.
Action Execution. Obviously, the action concept
of the ROS ActionLib is quite similar to that of
golog++. As described in Section 2.3, the action
server can finish in the states succeeded, aborted and
preempted.
The RosPlatformBackend implements the exe-
cute activity method simply by dispatching a goal to
the appropriate action server in non-blocking mode.
When the action is done, the callback then calls up-
date activity, informing golog++ of the action’s
success/failure. This ultimately allows the agent to
execute the primitive action end
A
(x) and to decide
whether/which effect has to be applied.
Another ROS concept that maps easily to
golog++ actions is executing ROS service calls. A
service call could be to e.g. enable face tracking on
the Pepper platform (cf. Fig. 3). Since service calls
are synchronous by nature, they have to be started in
an own thread, so that they don’t block the execu-
tion of the golog++ agent program. The thread then
waits until the service reply has been received, and
calls update activity with finish or fail depending on
whether the service call was successful or not.
Active Sensing. As described in Section 2.3, both
an action server and a service call can return a spe-
cific result. The RosPlatformBackend translates the
result into a golog++ Value and passes it to the
update activity function as a sensing result, together
with the outcoming action state. So active sensing
is realized like a normal golog++ action with the
only difference that the action server (or service) has
to provide a result in addition to the success/failure
outcome.
Exogenous Actions. Exogenous actions are event-
based by nature, which precisely matches the core
message-passing architecture of ROS. Thus imple-
menting an exogenous action comes down to simply
subscribing to a topic where a message is published
when the desired event occurs. The message is then
converted into an ExogEvent object to be handled by
the golog++ event loop.
5.1 Design of the
ROSPLATFORMBACKEND
One problem we did not mention so far is the fact that
all ROS message types are realized as generated C++
headers with a strict typing discipline. Since every
ActionLib action uses specific messages for the com-
munication between ActionServer and ActionClient,
both have to be either hand-written or generated in
C++. Currently, the ROS ActionLib can generate Ac-
tionClients, but it does so without making use of in-
heritance, so there is no abstraction that would allow
handling an ActionClient in a generic manner.
That is why, as shown in Figure 4, the Action-
Manager, ExogManager and ServiceManager classes
exist, and why they must all be template classes.
Their template argument is the action/service type for
the ActionManager and ServiceManager respectively,
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
696
gologpp
«Interface»
ExecutionContext
+ exog_queue_push( in e: ExogEvent)
+ run( in program: Block)
«Interface»
PlatformBackend
+ execute_activity( in a: Activity)
+ preempt_activity( in a: Activity)
+ update_activity( in a: Activity)
gologpp_ros
ActionT
ResultT
StateT
GoalT
ServiceManager
+ make_request( in a: Activity): RequestT
+ convert( in r: ResponseT): Value
SrvT: Class
ExogManager
+ convert( in r: MsgT): Value
MsgT: Class
ActionManager
- make_goal( in a: Activity): GoalT
+ convert( in r: ResultT): Value
ActionT: Class
SrvT
RequestT
ResponseT
RosPlatformBackend
+ execute_activity( in a: Activity)
+ preempt_activity( in a: Activity)
+
+
1
1
+
+
1
*
+
+ service
1
0..1
+
+
1
*
+
+ goal
1
0..1
+
+
1
*
Figure 4: A UML class diagram that shows the most im-
portant properties of the golog++ PlatformBackend and
some implementation details of the RosPlatformBackend.
template<>
darknet::obj_detectionGoal
ActionManager <
darknet::obj_detectionAction
>::make_goal(const gpp::Activity &a)
{
darknet::obj_detectionGoal goal;
goal.obj_to_detect = std::string(
a.mapped_arg_value("obj"));
return goal;
}
Figure 5: Specialization of the make goal method, which
assigns the argument of an activity to a goal member for the
action server. The string argument to the mapped arg value
method specifies the name of the golog++ action’s pa-
rameter, which can optionally be remapped from within the
golog++ code (hence the method’s name).
and the plain message type of the subscribed topic for
the ExogManager. With this design, we are able to
keep almost all of the glue code generic and lever-
age the code generation of the C++ template system
to significantly reduce the amount of work that needs
to be done to make a specific ROS action, service or
topic accessible to golog++.
The only thing that remains to be written specifi-
cally for an action/service/topic is the actual mapping
of data fields. As an example, consider the specializa-
tion of if the make goal method in Figure 5. It sim-
ply maps the arguments of a golog++ action onto a
goal for the DarkNet
4
ActionServer that does the ob-
ject recognition used in Figures 1 and 2. The rest is
taken care of by generic template code that is instan-
tiated by the C++ compiler when it sees this special-
ization. If/when an outcome from the action server
should be delivered as a sensing result, that is han-
dled by another template specialization which trans-
lates that specific result type to a golog++ value.
6 DISCUSSION & OUTLOOK
The most obvious benchmark to compare the
golog++ RosPlatformBackend to is the ROSPlan
PDDL interface. ROSPlan interfaces to the outer
world by publishing generic ActionDispatch mes-
sages that have to be received by another ROS node
which then somehow implements the desired be-
haviour. Most commonly, that is done by executing
some ActionLib action, just as in golog++. Unlike
in golog++, in ROSPlan the programmer also has
the freedom to not use ActionLib and write a free-
form ROS node that can do anything. This freedom
however can also be viewed as a lack of interface
rigidity, and it comes with the cost of large amounts
of boilerplate code. Having such a fundamentally un-
restricted behaviour node also significantly increases
the risk of programmer errors, especially when con-
sidering that it requires high-level developers to read
into low-level ROS concepts.
In contrast, the golog++ RosPlatformBackend
defines an extremely rigid interface for the platform
integrator to implement. The behaviour required
of the convert, make goal and make request method
templates is completely specified by their respective
input and output types (cf. Fig. 5). Most importantly,
a golog++ platform integrator needs only to be pro-
ficient in C++, no further knowledge about ROS con-
cepts (or even golog++ concepts for that matter)
is required except what can be gleaned immediately
from the types in the method’s signature. Should
action-specific quirks be required at other points in
the control flow, the RosPlatformBackend also sup-
ports that by deriving from the ActionManager, Ex-
ogManager or ServiceManager class templates.
The difference between the two approaches also
becomes apparent in the number of lines of code that
are required to e.g. make a MoveBase action avail-
able. In golog++ that amounts to ∼12 LoC to trans-
late action arguments into a MoveBaseAction goal. In
ROSPlan, an entire ROSNode needs to be written for
the same job, which weighs in around 50 LoC, most
4
https://github.com/pjreddie/darknet
Integrating golog++ and ROS for Practical and Portable High-level Control
697

of which deals with managing the node itself as well
as ActionClient objects, callbacks and other accesso-
rial data structures which are hidden from the user in
golog++.
Practical tests on the Pepper platform (Fig. 3)
have shown that golog++ in combination with ROS
yields an easy-to-use and robust high-level agent ar-
chitecture. Since Pepper is a platform directly tar-
geted at human-robot interaction, implemented tasks
revolved around social robotics. That is, Pepper acts
as a simple tour guide in the rooms of the MAS-
COR Institute, or demonstrates simple speech-based
human-robot interaction and neural network-based
object recognition at science fairs and other events.
golog++’s concise syntax and interpreted nature
turned out to be very helpful in such scenarios by
making it easy to adapt a demo application on the
spot, e.g. to address questions from the audience.
Preliminary user studies have also shown that,
given some rudimentary documentation and exam-
ple code, users with varying backgrounds in robotics
and computer science were able to interface their first
new action to the golog++ RosPlatformBackend in
about one hour. Subsequent action interfaces were
then done within mere minutes.
In the future, we plan on releasing golog++ with
the RosPlatformBackend as a ROS package to make
it as accessible as possible. The next development
step will be to hook into the ROS message generation
infrastructure to completely automate the process of
interfacing a ROS action to golog++ so that no ad-
ditional C++ coding will be necessary.
We are also following the development of ROS2
and will consider a port as soon as important function-
alities like the ActionLib are sufficiently developed.
ACKNOWLEDGEMENTS
This work was supported by the German Na-
tional Science Foundation (DFG) under grant number
FE 1077/4-1
REFERENCES
Adam, K., Butting, A., Kautz, O., Rumpe, B., and Wort-
mann, A. (2017). Executing robot task models in dy-
namic environments. In Proceedings of the 3rd In-
ternational Workshop on Executable Modeling (EXE)
held at ACM/IEEE 20th International Conference on
Model Driven Engineering Languages and Systems
(MODELS), pages 95–101.
Andres, B., Obermeier, P., Sabuncu, O., Schaub, T., and
Rajaratnam, D. (2013). ROSoClingo: A ROS package
for ASP-based robot control. CoRR, abs/1307.7398.
Beetz, M., M
¨
osenlechner, L., and Tenorth, M. (2010).
CRAM A Cognitive Robot Abstract Machine for
everyday manipulation in human environments. In
2010 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems, pages 1012–1017.
Bohren, J. and Cousins, S. (2010). The smach high-level
executive [ros news]. IEEE Robotics & Automation
Magazine, 17(4):18–20.
Boutilier, C., Reiter, R., Soutchanski, M., Thrun, S., et al.
(2000). Decision-theoretic, high-level agent program-
ming in the situation calculus. AAAI/IAAI, 2000:355–
362.
Brunner, S. G., Steinmetz, F., Belder, R., and D
¨
omel, A.
(2016). Rafcon: A graphical tool for engineering com-
plex, robotic tasks. In 2016 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS),
pages 3283–3290. IEEE.
Cashmore, M., Fox, M., Long, D., Magazzeni, D., Ridder,
B., Carreraa, A., Palomeras, N., Hurt
´
os, N., and Car-
rerasa, M. (2015). ROSPlan: Planning in the Robot
Operating System. In Proceedings of the Twenty-Fifth
International Conference on International Conference
on Automated Planning and Scheduling, ICAPS’15,
pages 333–341. AAAI Press.
De Giacomo, G., Lesp
´
erance, Y., and Levesque, H. J.
(1997). Reasoning about concurrent execution, priori-
tized interrupts, and exogenous actions in the situation
calculus. In IJCAI, volume 97, pages 1221–1226.
De Giacomo, G., Lesp
´
erance, Y., Levesque, H. J., and Sar-
dina, S. (2009). Indigolog: A high-level programming
language for embedded reasoning agents. In Multi-
Agent Programming, pages 31–72. Springer.
De Giacomo, G. and Levesque, H. J. (1999). An incremen-
tal interpreter for high-level programs with sensing. In
Logical foundations for cognitive agents, pages 86–
102. Springer.
Eppe, M., Bhatt, M., Suchan, J., and Tietzen, B. (2014).
ExpCog: Experiments in commonsense cognitive
robotics. In Proceeding of the 9th International Work-
shop on Cognitive Robotics (CogRob) held at the Eu-
ropean Conference on Artificial Intelligence (ECAI
2014).
Ferrein, A. (2010a). golog.lua: Towards a non-prolog
implementation of GOLOG for embedded systems.
In Hoffmann, G., editor, Proceedings of the AAAI
Spring Symposium on Embedded Reasoning, (SS-10-
04), pages 20–28. AAAI Press.
Ferrein, A. (2010b). Robot controllers for highly dy-
namic environments with real-time constraints. KI -
K
¨
unstliche Intelligenz, 24(2):175–178.
Ferrein, A. and Lakemeyer, G. (2008). Logic-based robot
control in highly dynamic domains. Robotics and Au-
tonomous Systems, 56(11):980–991.
Ferrein, A., Maier, C., M
¨
uhlbacher, C., Niemueller, T.,
Steinbauer, G., and Vassos, S. (2016). Controlling lo-
gistics robots with the action-based language YAGI.
In International Conference on Intelligent Robotics
and Applications, pages 525–537. Springer.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
698

Ferrein, A. and Steinbauer, G. (2010). On the way to
high-level programming for resource-limited embed-
ded systems with GOLOG. In International Confer-
ence on Simulation, Modeling, and Programming for
Autonomous Robots, pages 229–240. Springer.
Ferrein, A., Steinbauer, G., and Vassos, S. (2012). Action-
based imperative programming with YAGI. In Work-
shops at the Twenty-Sixth AAAI Conference on Artifi-
cial Intelligence.
Fox, M. and Long, D. (2011). PDDL2.1: an extension
to PDDL for expressing temporal planning domains.
CoRR, abs/1106.4561.
Gebser, M., Grote, T., Kaminski, R., and Schaub, T. (2011).
Reactive answer set programming. In LPNMR, vol-
ume 6645 of Lecture Notes in Computer Science,
pages 54–66. Springer.
Grosskreutz, H. (2002). Towards more realistic logic-based
robot controllers in the GOLOG framework. PhD the-
sis, Bibliothek der RWTH Aachen.
Grosskreutz, H. and Lakemeyer, G. (2000). Turning high-
level plans into robot programs in uncertain domains.
In ECAI, pages 548–552.
H
¨
ahnel, D., Burgard, W., and Lakemeyer, G. (1998).
GOLEX: Bridging the gap between logic (GOLOG)
and a real robot. In Herzog, O. and G
¨
unter, A., editors,
KI-98: Advances in Artificial Intelligence, volume
1504 of Lecture Notes in Computer Science, pages
165–176. Springer Berlin Heidelberg.
Lakemeyer, G. (1999). On sensing and off-line interpret-
ing in golog. In Logical Foundations for Cognitive
Agents, pages 173–189. Springer.
Levesque, H. J., Reiter, R., Lesp
´
erance, Y., Lin, F., and
Scherl, R. B. (1997). GOLOG: A logic programming
language for dynamic domains. Journal of Logic Pro-
gramming, 31(1–3):59–84.
Matar
´
e, V., Schiffer, S., and Ferrein, A. (2018). golog++:
An integrative system design. In Proceedings
of the 11th Cognitive Robotics Workshop 2018
(CogRob@KR 2018), co-located with 16th Interna-
tional Conference on Principles of Knowledge Rep-
resentation and Reasoning, pages 29–36.
McCarthy, J. (1963). Situations, actions, and causal laws.
Technical Report Memo 2, AI Lab, Stanford Univer-
sity, California, USA. Published in Semantic Informa-
tion Processing, ed. Marvin Minsky. Cambridge, MA:
The MIT Press, 1968.
McCarthy, J. and Hayes, P. J. (1969). Some philosophi-
cal problems from the standpoint of artificial intelli-
gence. In Meltzer, B. and Michie, D., editors, Machine
Intelligence 4, pages 463–502. Edinburgh University
Press. reprinted in McC90.
McDermott, D., Ghallab, M., Howe, A., Knoblock, C.,
Ram, A., Veloso, M., Weld, D., and Wilkins, D.
(1998). PDDL – the planning domain definition lan-
guage.
McDermott, D. M. (2000). The 1998 ai planning systems
competition. AI magazine, 21(2):35–35.
Pandey, A. K. and Gelin, R. (2018). A mass-produced
sociable humanoid robot: Pepper: The first machine
of its kind. IEEE Robotics Automation Magazine,
25(3):40–48.
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T.,
Leibs, J., Wheeler, R., and Ng, A. Y. (2009). ROS: an
open-source robot operating system. In ICRA work-
shop on open source software, volume 3, page 5.
Kobe, Japan.
Reiter, R. (1996). Natural actions, concurrency and contin-
uous time in the situation calculus. In Proceedings
of the Fifth International Conference on Principles
of Knowledge Representation and Reasoning, KR’96,
pages 2–13, San Francisco, CA, USA. Morgan Kauf-
mann Publishers Inc.
Reiter, R. (2001). Knowledge in Action. Logical Founda-
tions for Specifying and Implementing Dynamical Sys-
tems. MIT Press, Cambridge, Massachusetts.
Schiffer, S., Ferrein, A., and Lakemeyer, G. (2012). CAE-
SAR: An intelligent domestic service robot. Intelligent
Service Robotics, 5:259–273.
Integrating golog++ and ROS for Practical and Portable High-level Control
699
