
Harmonized Group Mix for ITS
Mirja Nitschke
a
, Christian Roth
b
, Christian Hoyer and Do
˘
gan Kesdo
˘
gan
University of Regensburg, Regensburg, Germany
Keywords:
V2V Communication, Mix, Privacy, k-Anonymity, ITS.
Abstract:
Vehicle-to-Vehicle (V2V) communication is crucial for almost all future applications in the context of smart
traffic, such as autonomous driving. However, while current standards like WAVE provide a technical platform
for communication and management, they lack aspects of privacy for their participants. In this paper, we
introduce a Harmonized Group Mix (HGM), an architecture suited to exchange information in ITS, compatible
with current standards. HGM does not rely on expensive Road-Side-Units (RSUs) or complex organizational
relationships to introduce a trust anchor but is built on the concept of peer-to-peer networks. Hence, our
proposal does not require any changes to current environments and is eventually easy to deploy in the real
world. Our proposed method provides k-anonymity using group signatures and splits trust between multiple
parties. At the same time, the integrity of the system is preserved. We evaluate our approach using the
simulation framework Veins. Our experiments show that HGM is feasible from a performance and privacy
perspective in the given context.
1 INTRODUCTION
In the EU and USA, the potential of Vehicle-to-
Vehicle (V2V) communication has been identified
years ago. With the creation of the CAR 2 CAR Com-
munication Consortium and the Transportation Sys-
tems Committee efforts are being made to standard-
ize communication in this field, crucial for global suc-
cess. Existing standards like WAVE provide a modern
platform for V2V communication allowing real time
communication and thus enabling modern use cases,
such as autonomous driving. Data needed for this
kind of application has to be precise, up-to-date, and
most importantly integer. The exact location of every
user must be known at all times in order to provide a
safe and secure environment. This may conflict with
interests of privacy of participants. For instance, loca-
tion traces are sensitive because they give insight into
a user’s behavior and daily routine. Current standards
treat privacy interest as an orphan, hence, privacy has
become an issue of interest to science and industry.
Our contribution is an architecture extension for
V2V communication that provides anonymous and
yet authenticated broadcast messages by using the
idea of mix technology to harmonize the appearance
of different messages of miscellaneous users. The
a
https://orcid.org/0000-0002-2527-6340
b
https://orcid.org/0000-0002-1668-5441
Harmonized Group Mix (HGM) is designed to be
compatible to current standards. The architecture has
several advantages. First, the organizational structure
is simple, beside the users we only need one other en-
tity. Second, this entity is merely semi-trusted. Third,
we limit cryptographic overhead by only using group
signatures. Fourth, a sender cannot easily be iden-
tified because the collaboration of several tracing au-
thorities is needed to decrypt the group signature, pro-
viding maximum privacy. We follow the classical ap-
proach of the triple bottom line of security “algorithm,
adversary and evaluation”.
The remainder of this paper is organized as fol-
lows. After a review of related work in Section 2, we
discuss the system model in Section 3. We present our
approach Harmonized Group Mix (HGM) to provide
anonymous and yet authenticated broadcast Messages
in the context of the ITS in Section 4. In Section 5
we evaluate the proposed approach and discuss the re-
sults. Section 6 concludes the paper and names possi-
ble extensions of our approach. A list of notation can
be found in Appendix A.
2 RELATED WORK
The topic of privacy in vehicular ad-hoc networks
(VANETs) has been investigated in various works,
152
Nitschke, M., Roth, C., Hoyer, C. and Kesdo
˘
gan, D.
Harmonized Group Mix for ITS.
DOI: 10.5220/0008989101520163
In Proceedings of the 6th International Conference on Information Systems Security and Privacy (ICISSP 2020), pages 152-163
ISBN: 978-989-758-399-5; ISSN: 2184-4356
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

for example, (Papadimitratos et al., 2007) focus on
management of identities and cryptographic keys,
(Sampigethaya et al., 2005) concentrate on the possi-
bility of tracking of broadcast communications. (Ca-
landriello et al., 2007) investigate in their archi-
tecture into pseudonym-based authentication, while
(Khodaei and Papadimitratos, 2015) direct their at-
tention towards Vehicular Public Key Infrastructure.
Other interesting approaches are (Alexiou et al., 2013;
Plossl et al., 2006; Laurendeau and Barbeau, 2007).
(Brecht et al., 2018) propose a security credential
system that uses certificates to balance privacy and
anonmyity. However, they rely on a complex struc-
ture of multiple organizations in contrast to our work.
(Guo et al., 2007) suggest a superficial group sig-
nature based security framework in which the iden-
tity of an individual can be uncovered using only one
other entity. (Verheul, 2016) use short time certifi-
cates where multiple deactivated certificates are given
to a vehicle during a setup phase. Activation can be
then be performed once a central authority dispatches
activation keys for a specific certificate, however, the
vehicle must be connected to the network to receive
the codes. The certificate holder can change the cer-
tificate to sign off messages at a given time to protect
himself against location based attacks.
There is also a great deal of literature on archi-
tectures that enable anonymous V2V communication
(Sun et al., 2007; Hao et al., 2008; Xiaonan et al.,
2007; Sampigethaya et al., 2005; Hu et al., 2011;
Zhang et al., 2010). However most of these papers
rely on Road-Side-Units (RSU), which are either au-
tonomous or controlled by a single trusted third party.
We focus in our work on unlinkability between
messages, as previously mentioned. We try to en-
hance the idea of linking single messages not to a spe-
cific (pseudonymized) entity but to a group of people.
Thus we combine the Mix idea with group signatures
to provide location aware message while not disclos-
ing a specific identity.
3 SYSTEM MODEL
Our system model is compatible with the typical sce-
nario of an Intelligent Transportation System (ITS).
Vehicles (i.e. users u ∈ U) drive along a road network
in different trajectories and eventually pass other ve-
hicles, most of the time quite quickly. Each vehicle
is inseparably equipped with communication devices
called On-Board-Units (OBUs; see (Papadimitratos
et al., 2007)) that enable them to exchange informa-
tion in an authenticated and unforgeable way. It can
be preloaded with cryptographic material.
In typical ITS scenarios, vehicles have to ex-
change information, thus silent periods are not accept-
able and the ability to send messages must be in place
at all times. Messages are broadcasted within the net-
work and can be relayed by all participants U and/or
external (static) entities such as Road-Side-Units. The
set M describes all messages m ∈ M sent.
Each user u is uniquely identifiable via his ve-
hicle ID id(obu) which is inextricably linked to his
OBU. The OBU is responsible for signing off mes-
sages, thus allowing each m to be traced back to u
via id(obu). The information in general is arbitrary,
but is always enriched with a timestamp and a GPS
location due to the nature of an ITS. Since every mes-
sage is traceable to a specific location it is obvious
that such messages are a threat for a participant’s pri-
vacy. A trajectory of several messages traceable to
a single user provides information about a user’s be-
havior and is thus a sensitive asset that needs to be
protected. Therefore, each participant has an interest
in hiding their true identity in combination with the
originating messages.
3.1 Group Signatures
A feasible approach to provide anonymity is the us-
age of group signatures, which were first presented in
(Chaum and Van Heyst, 1991) and were extended by
(Chen and Pedersen, 1995; Boneh et al., 2004; Lin
et al., 2007; Camenisch, 1997). Group signatures al-
low members of a group to sign messages on behalf
of the entire group. They are verifiable with a single
public verification key associated to the group as a
whole. Afterwards, nobody can identify the origina-
tor of that signature or link signed messages of the
same originator, except for a tracer authority hold-
ing a special opening key. A second role, called
group leader, distributes signing keys along all mem-
bers. Furthermore, next to anonymity and traceabil-
ity, group signatures provide non-frameability and un-
forgeability, essential building blocks for a vehicular
communication protocol. In particular, we select a
scheme providing the following functionality:
• Users may join a group after it has been created
(dynamic groups).
• A group leader must not be the only tracer (two
authorities).
• The ability to identify the originator of a message
has to be split across multiple entities (distributed
tracers).
• No central key distributing agency or any other
similar trusted third party.
Harmonized Group Mix for ITS
153

• CCA-full-anonymous (Fischlin, 2005) properties
against insider attacks since every vehicle can be
a potential attacker.
• Very short signatures due to limited packet size
(around 1024 byte) while providing enough space
left for payload.
Such a protocol can be realized using the group signa-
ture scheme by (Bl
¨
omer et al., 2016) which is based
on work from (Boneh et al., 2004) and extends it
to provide distributed traceability. Furthermore, we
adapt (Delerabl
´
ee and Pointcheval, 2006) to feature
dynamic groups.
3.2 Mix
A viable approach to anonymize the communication
between two users is the Mix Network introduced in
(Chaum, 1981). Presented simply, a Mix is a chain of
nodes that a message has to pass from a user to its des-
tination. A Mix collects several messages from dif-
ferent people which have been multi-layer encrypted
by the originator using known asymmetric keys of all
Mix nodes in the chain. Then each Mix node de-
crypts the respective layer of the message using its
private key and thus changes the message’s appear-
ance. It now issues all messages in changed order and
the next Mix node performs the same operation un-
til the message reaches its destination. Thereby an
eavesdropper can not link incoming to outgoing mes-
sages in the system due to changes in shape and or-
der. We pick up this idea, by harmonizing the ap-
pearance of several messages from different users by
using group signature encryption. Because the users
act themselves as mix, see Figure 1, nobody sees the
incoming messages and the mix does not have to col-
lect various messages. Instead an attacker can only
link a message to a group of users and not to a single
user.
3.3 Attacker
All participants are considered to be honest-but-
curious, i.e. they respect each protocol step but want
to gain more knowledge about others. Given that, the
attacker in our system is typically anyone who can
actively interact with the system like replaying mes-
sages. Thus we require CCA full-anonymity. As a
consequence each user is able to collect messages dis-
tributed in the system and store them in a message log
ˆ
M . The attacker’s main goal is to link multiple mes-
sages m to a user u, however a user may use different
pseudonyms π at the same time to craft messages m.
In the end, the attacker can then use the log of col-
lected messages
ˆ
M and his knowledge about his own
behavior along with π and to build a full location tra-
jectory of a user u.
For our setup, we assume that the attacker knows
all system parameters. This results in an even more
severe threat to stress our algorithm. He starts his at-
tack to link messages to user and derive information
about that participant’s driven path. However, as men-
tioned, it is very resource intensive for an attacker to
gain access to multiple OBUs, hence, we assume that
he is unable to control a big part of the network. We
do not focus on approaches to validate a message’s
content (i.e. the substance) in this work. One can, for
example, rely on (Chen et al., 2011) for that. How-
ever, we provide a method to reveal the originator of
a message.
3.4 WAVE
This section presents a brief derivation of re-
quirements for our approach on the basis of the
IEEE 802.11p standard and the IEEE 1609 extension.
Together they are collectively called WAVE (Wire-
less Access for Vehicular Environments) (IEEE 1609
Working Group, 2017). In order to exchange infor-
mation, participants form a WAVE Basic Service Set
(WBSS, c.f. IEEE 1609.3) for the organization of our
anonymity groups (see (Uzcategui et al., 2009)).
The IEEE 1609.4 standard features multichannel
operation over WAVE PHY and MAC layers. It pro-
vides a control channel (CCH) and 6 service channels
(SCH) usable by different applications. Each chan-
nel has different characteristics regarding maximum
transmit power or frequency depending on the appli-
cation requirements. Depending on the speed of a
vehicle, packet loss and bandwidth may vary (Bilgin
and Gungor, 2013). Due to its safety-critical property,
the control channel is best suited for stable and longer
range communication in the urban context (Gr
¨
afling
et al., 2010). Thus, we derive the following require-
ments: communication exchange on SCHs should be
minimal and must be completed while vehicles are in
close range. The protocol shall be as efficient and ro-
bust as possible.
4 HARMONIZED GROUP MIX
We now introduce Harmonized Group Mix (HGM)
for ITS. Our approach combines ideas from Mixes
to change the shape of a message, i.e. harmonizing
them, with group signatures to dynamically build new
Mix groups.
ICISSP 2020 - 6th International Conference on Information Systems Security and Privacy
154

User
Group
User
Group
Group
Figure 1: White- and Blackbox view on the Mix groups
each producing harmonized messages unlinkable to the
originator. Because every user operates his own Mix node
the group does not need to communicate after exchanging
the group keys.
User
Group Leader
Tracer
LEA
Key-
Directory
User-
List
Blame-
List
User
Group
Figure 2: A organizational overview of HGM’s entities and
roles.
4.1 High Level Overview
HGM only relies on two basic entities to balance
anonymity and integrity and is therefore significantly
less complex than other approaches. Next to all users,
a semi trusted third party called Law Enforcement
Agency (LEA), managing a userlist containing U, is
present. Figure 2 illustrates all entities and relation-
ships. Each user can own multiple roles in the system.
In general, there is no need to attach personally
identifiable information to a message or restrict any
access to it at all. However, in real world scenarios
it is likely that dishonest users try to attack the sys-
tem by e.g. flooding it with bogus information. This
is in particular true for the open nature of V2V archi-
tectures where dishonest users are eventually present.
Thus, countermeasures to exclude such users from
a system are needed; potential threats are discussed
later on in section 4.4.
HGM uses separation of duties to isolate a user’s
activity from his identity. Messages are not directly
linkable to a user u or his respective pseudonym π
i
but to arbitrary groups g
i
∈ G. A group is managed
by another user (called group leader l(g
i
) = π
x
with
π
x
being the group leader’s pseudonym) who is re-
sponsible for creating groups or adding new members
while preventing the need for a trusted third party. All
messages from a group are harmonized, i.e. identifi-
able information to a user is obfuscated. Hence, every
member of a group may be the originator of a message
making it hard for an adversary to gain any additional
information about a user. To further distribute power
this obfuscation can only be removed if the majority
𝑔
1
𝑔
3
𝑔
2
𝜋
1
𝑡
1
𝑡
2
𝑡
3
𝑡
4
𝑡
5
𝑡
6
𝑡
7
𝑡
0
𝜋
2
𝜋
3
Join
Join
Lazy
Join
Pseudonym lifetime
Δ𝑡
𝐺,𝑣
Δ𝑡
𝐺,𝑖
Δ𝑡
𝐺,𝑐
Figure 3: Process flow of HGM. A user holds multiple
pseudonyms π which he uses to participate in different
groups g. Each message (rectangle, circle, plus) is only
linkable to a group but not the pseudonym. A user can se-
lect a pseudonym to join multiple groups at once even his
own enhancing anonymity.
of a user group (called tracers) agrees. After sending
a message, it is impossible for an receiver to tell the
originator of a message since all messages have been
mixed within the group. Messages are crafted locally
in a user’s domain using their private group key (see
Figure 1) because only the local vehicle is assumed to
be fully trusted.
In contrast to existing approaches, no silent peri-
ods are needed when changing from one π to another
since a user holds multiple πs and is always member
in multiple groups. Figure 3 shows an except of the
lifetime of a single user u. He can use every π ∈ Π
during its pseudonym lifetime to join groups at any
time as long as they are accepting new users (up to
∆t
G,i
after creation). He can then randomly use each
joined group to craft messages breaking up a poten-
tial location trajectory. Groups also have a specific
lifetime of ∆t
G,v
to ensure that expired or blocked
pseudonyms are not able to send messages anymore.
As a consequence messages from such groups are dis-
carded upon reception. A new group can be formed at
any time but has to be completed within ∆t
G,c
.
4.2 Roles
Our approach uses different entities to separate
knowledge and control. Communication between
these different entities should be minimized, not only
because of the performance aspect but also because of
anonymity.
Law Enforcement Agency (LEA): Managed, for in-
stance, by the government, LEA keeps track of all
U and acts as a doorkeeper. She is a semi-trusted
party since all users trust authenticated entities from
her. LEA is not considered and needed to be fully
trusted, since she can only detect that users want to
participate, but is unable to gain any knowledge about
their activity. This is important since this entity rep-
Harmonized Group Mix for ITS
155

resents a global attacker in the honest-but-curious at-
tacker model. For example, the LEA is interested in
the GPS trajectory of a specific OBU – something
HGM targets to protect against.
Participant: A user becomes a participant when
he has an entitled OBU allowing him to interact with
the system. It is the most basic role in our system.
Participants can use multiple signed pseudonyms π
to enroll in dynamically created anonymity groups.
Only participants in a group can create messages. A
user’s permission to be a participant is controlled by
LEA.
Group Leader: Since anonymity in our system is
achieved by organizing multiple and unique partici-
pants in groups, there has to be a managing entity
called group leader. A group leader is responsible
for managing groups including key distribution, al-
though, he is not needed during crunch time. Further-
more, the group leader does not gain any additional
knowledge about his group participants except know-
ing which pseudonym has joined with what role. He
is unable to tell if different signed pseudonyms point
to the same id(obu).
Tracer: Because any group member can create
valid messages on the behalf of his anonymity group,
the whole group is to blame in the case of, for ex-
ample, forged messages. Therefore the system allows
to reveal the real identity of the originator. We split
the ability to map m → π between multiple, randomly
chosen group members, called tracers. A specific per-
centage of these tracers has to work together to reveal
a message originator. Thus, they are accountable for
the integrity of the whole group including their own
messages.
4.3 Protocol
We now present an in depth look into the protocol.
Communication between users is done via V2V com-
munication channels (e.g. WAVE) while information
between LEA is exchanged and directory lookups are
performed out-of-band, for instance via LTE support-
ing higher ranges and bandwidth. In Figures 4 to 6 we
denote out-of-band communication using - before the
entity.
Notation. c, d denote a public private key pair
used supporting encryption+decryption and sign-
ing+verifying. A group g of n members is denoted as
u
1
, . . . , u
n
∈ g where g holds a subset U
g
of all users
U and all groups G. |U
g
| defines the number of mem-
bers in that group. As mentioned in Section 3.1, we
use group signatures by (Bl
¨
omer et al., 2016) with the
stated extension. For the sake of simplicity, we do not
list all parameters of that group signature scheme but
only name additions needed for HGM. If stated, X and
Y always denote parameters for the group signature
scheme.
4.3.1 Initialization of the System
HGM provides anonymity i.a. through pseudonyms.
These pseudonyms are derived from a users id(obu)
in a reversible way to protect integrity. However, un-
veiling those shall only be possible by LEA. Request-
ing pseudonyms may be upstreamed so that problems
with unreliabe long-range communication can be mit-
igated.
To request an authenticated pseudonym, a user
sends a PSEUDOSIGNREQUEST(4) to LEA using
a user generated signing payload 4 = {id(obu) k
{0, 1}
k
}
c
LEA
, zk with k random bits. LEA is then re-
sponsible for signing the 4 and thus confirming the
rightful participation of the user. LEA responds with
a PSEUDOSIGNSUCCESS({4, ts}
d
LEA
) using the in-
put from the PSEUDOSIGNREQUEST. We call the
payload of that response π created at timestamp ts.
However, LEA also can reject a signing request if the
user’s vehicle ID is not in the user list or blacklisted
due to several reasons. In that case a PSEUDOSIGN-
DENIAL is sent and the user is unable to participate.
Since our system uses the WAVE protocol, each
message is broadcasted, therefore such πs are easily
interceptable. Thus, a user must prove his rightful
possession of that pseudonym. This is done by per-
forming a zero knowledge proof of knowledge when
showing π to other users. Public parameters zk are
therefore included.
4.3.2 Managing Groups
Each participant can become a group leader once it is
necessary. There are two different strategies when a
member decides to offer a new group for other partic-
ipants. A user may enter an area where he can admit-
tedly connect to others but none of these users within
reach intents to be a group leader. As a consequence,
the new user decides to open his own group according
to our protocol. In order to prevent situations where
not enough groups are available, a user decides with
probability ζ to open a new group.
HGM requires a setup phase for new groups ac-
cording to the group signature scheme’s step Setup
(Bl
¨
omer et al., 2016), however, no central key creat-
ing instance is used but specific steps are distributed.
We separate the sign ability from the trace ability ac-
cording to our constraints. Since this process requires
all participants to be able to communicate and ex-
change information, data size and number of commu-
ICISSP 2020 - 6th International Conference on Information Systems Security and Privacy
156

Group Leader
Other users -LEA
-Key-Directory
GROUPPUBLISHPARAMS
GROUPCREATE
GROUPCREATEINTENTION
Initial phaseInitial phase
Advertising new group and wait for users
GROUPTRACERINVITATION
GROUPTRACERKEYINFORM
GROUPTRACERINVITATION
GROUPTRACERKEYINFORM
Tracer phaseTracer phase
Collectively create trace key
INVITEGROUP
GROUPUPDATEPARAMS
Figure 4: Sequence of GROUPCREATE.
nication is minimized. The setup phase has two steps
(cf. Figure 4) but has to be completed within ∆t
G,c
seconds.
Firstly, the group leader signals, during the ini-
tial phase, to create a new group g
k
by updating
GROUPPUBLISHPARAMS the central key directory
with required information of his group ((id(g
k
),ts, X )
with ts being the creating timestamp) followed
by a GROUPCREATE broadcast, where he invites
users to join his group. Hence, he broadcasts
a GROUPCREATE(π, id(g
k
), SCH RC, ts
exp
) message
on the Control Channel (using an unused π ∈ Π and
a group id id(g
k
) ≡ H (π k {0, 1}
k
). In our scheme,
each group is organized in a WBSS (Wave Basic Ser-
vice Set) using one of the multiple channels (the se-
lected one is SCH RC) to minimize packet collisions
across different groups. At least θ
P
users need to state
their intention to join (GROUPCREATEINTENTION).
Otherwise the group setup phase may fail due to a
timeout. This is a precaution because during the setup
phase no user is able to send any payload messages
(using this group) and is only passively waiting for
response from l(g
k
).
Assuming θ
P
members are found, the group leader
starts the tracer phase by selecting θ
T
− 1 < θ
P
users using a direct message GROUPTRACERINVI-
TATION. Hopefully, θ
T
− 1 members respond with
GROUPTRACERKEYINFORM providing each infor-
mation about their secret key part sk
0,...,θ
T
−1
, the
group leader requests the remaining tracer part sk
l
from LEA as well. She always responds. Eventually,
the group leader can generate the verification key V K
and the public key PK (see (Bl
¨
omer et al., 2016)).
The setup is now complete and the group is ready
to accept members (U
g
k
=
/
0), broadcasting INVITE-
GROUP(π, id(g
k
)) for ∆t
G,i
seconds. At the same
time, he deposits the membership list, public group
key and verification key in an online directory for oth-
ers to download once they want to verify a signature
(GROUPUPDATEPARAMS).
4.3.3 Joining an Existing Group
A participant u
i
uses one π
j
∈ Π
u
i
to join a group g
k
(equals Join from (Bl
¨
omer et al., 2016) with the ex-
tension of (Delerabl
´
ee and Pointcheval, 2006)). In
order to find a group he observes the Control Chan-
nel for INVITEGROUP messages sent by l(g
k
), af-
terwards he checks the key directory, which it can
cache locally, for all required information. (cf. Fig-
ure 5) Once a user finds such a message indicat-
ing that a group leader accepts new members, a
user ask in a two way phase to join the group us-
ing GROUPSETUPJOIN1,2(π
j
, X , id(g
k
)). A success-
ful join finishes once the group leader answers with
a GROUPSETUPACCEPT1,2(id(g
k
), Y ) and executes
U
g
k
← u
i
.
A group leader is not able to tell if two distinct
pseudonyms point to the same user. Therefore, a
group leader only checks the received pseudonym π
j
for a correct signature from the LEA. He also uses
π’s included timestamp ts to enforce particular join-
ing constrains.
Harmonized Group Mix for ITS
157

Group Leader Participant -Key-Directory
INVITEGROUP
GETGROUPPARAMETER
RECEIVEGROUPPARAMETER
GROUPSETUPJOIN1
GROUPSETUPACCEPT1
GROUPSETUPJOIN2
GROUPSETUPACCEPT2
Join phaseJoin phase
Advertising group and wait for users
Figure 5: Sequence of GROUPJOIN.
4.3.4 Sending Messages
A user u
i
can send messages at any given time, but
usually every ∆t
M,b
seconds, as long as u
i
∈ U
g
k
(equals Sign from (Bl
¨
omer et al., 2016)). They then
send messages on behalf of that group. Consequently,
if a user wants to send some payload , he uses
his private part of the group key to craft a message
m = (,ts, id(g
k
), σ). σ is the signature of the mes-
sage m. To save space, H (σ) is the message ID. Also,
id(g
k
) is included in the message. This fulfills two
purposes. Firstly, a user receiving a message can vali-
date the signature by just acquiring the group’s public
key from the online directory and then use this key to
verify the signature. Secondly, id(g
k
) is used for the
blame process explained in the next section.
By design, a user should be a member of differ-
ent groups at the same time. Therefore he can send
messages using any of his private group keys. This
allows him to become untraceable by interrupting any
message trajectories. As a note, any other identifying
information (e.g. MAC address) must be changed.
Messages are relayed by other members receiving
them. However, they always verify a message’s signa-
ture first
1
(using SignatureVerify from (Bl
¨
omer et al.,
2016)) before they resend the message without chang-
ing it. Furthermore, users do not relay messages if the
payload’s geographical location is too far away from
the user’s current position. This is done to reduce load
on the network. Also, messages are discarded if they
are too old.
4.3.5 Blaming a Message
Our system allows users to send any payload (includ-
ing sensitive GPS-coordinates) without revealing the
1
Required information can be looked up in the key di-
rectory and be cached locally.
identity, yet all messages are authenticated making
HGM an integer system. Keeping that state is done
by a deliberate backdoor. A user who suspects a mes-
sage m from group g
k
can start a blame process (cf.
Figure 6) which potentially reveal m’s originator (i.e.
find m → π). This can only be done with the sup-
port of the tracers of the message’s group. LEA itself
is unable to find out any more information about the
message conforming our requirements. We recall a
message m = (, ts, id(g
k
), σ) holds all the required
information, and in particular the group ID id(g
k
).
Blaming one m requires a valid π. Any user
owning π
b
sends a MESSAGEBLAMEREQ(m, π
b
) to
LEA. She validates the blame request by extracting
the id(obu)
b
from the pseudonym π
b
using her private
key d
LEA
. LEA keeps a record of all blame request for
each id(obu)
b
to prevent abusive use of blaming. A
unsuccessful blame request (i.e. a blame request de-
nied by tracers) increases id(obu)
b
’s penalty score on
the userlist.
LEA posts a valid MESSAGEBLAMEREVEAL(m)
to a blame list. For maximum transparency, a
blockchain based list can be used. Every tracer
has subscribed to that list and listens for changes
(MESSAGEBLAMEUPDATE). If a new entry is added,
each tracer first checks if he was tracer for that spe-
cific group using the id(g
k
) field. If so, he decides on
its own if he wants to use his part of the tracer key to
reveal his part of the user’s real identity (ShareOpen
from (Bl
¨
omer et al., 2016)). The process has to be
completed within ∆t
G,b
, otherwise fails.
• MESSAGEBLAMEACCEPT: A tracer also doubts
that the message’s payload is true because, e.g.
he has seen otherwise or he tries to compromise a
user.
• MESSAGEBLAMEDENIAL: A confirmation of the
payload ultimately leads to this behavior of a
tracer, but it is also possible that an adverse tracer
ICISSP 2020 - 6th International Conference on Information Systems Security and Privacy
158

-LEA
Participant
All Tracers -Blamelist
-Userlist
MESSAGEBLAMEREQ
MESSAGEBLAMEREVEAL
MESSAGEBLAMEUPDATE
List updateList update
MESSAGEBLAMEACCEPT or
MESSAGEBLAMEDENIAL
VotingVoting
MESSAGEBLAMEFINISH
Figure 6: Sequence of MESSAGEBLAME.
is shielding the originator.
Since we are in a highly dynamic network it may oc-
cur that a proportion of former tracers leaves the net-
work or does not answer the blame request. There-
fore, HGM does not require all θ
T
tracers to accept
an blame request. Instead only λ ∗ θ
T
< θ
P
tracers
need to accept an request. This is sufficient to reveal
the real identity (i.e. the π used in that group) of the
message originator. Once, λ percent of T (g
k
) coop-
erated to reveal the π, LEA can perform ShareVer-
ify in combination with ShareCombine from (Bl
¨
omer
et al., 2016) and then extract the id(obu) and add a
penalty point to it which may lead to putting it on
the blacklist if a penalty point threshold is exceeded
(MESSAGEBLAMEFINISH).
4.4 Security & Anonymity
LEA is responsible for authenticating the
pseudonyms of the specific users. Only she can
match different pseudonyms to single users. Thus,
she is able to limit the amount of pseudonyms a
user can have at the same time and is essential for
the protection against sybil attacks. She sends a
PSEUDOSIGNDENIAL once a user already exceeds
the limit of valid pseudonyms allowed at a particular
time. A pseudonym is considered valid as long it is
not expired. LEA is unable to tell if a pseudonym is
in active use, therefore each π given to a user counts
towards a limit θ
π
.
HGM is build on the idea that people hold multiple
pseudonyms at once which sounds counterintuitive at
first. Table 1 discusses how HGM protects against
multiple attacks.
It is also important to consider the ratio of θ
T
and
θ
P
, i.e. the minimum number of tracers and users
during group setup phase (and in particular GROUP-
TRACERKEYNEGOTIATION). If θ
T
= θ
P
then the
group leader is forced to select every member of the
group as a tracer resulting in predictability to become
a tracer. An adversary user may circle the group
leader with all of his θ
π
pseudonyms knowing that he
will later hold θ
π
parts of the tracer key. Therefore, it
is recommended to set θ
T
θ
P
.
5 EVALUATION
We now evaluate HGM using a state-of-the-art
vehicular network simulation framework called
Veins (Sommer et al., 2011). Veins has support for
IEEE 802.11p and WAVE module. In the following
sections, we will describe the setup and parametriza-
tion of our simulation model. We then present our
results and show that HGM is feasible from a privacy
and performance perspective.
An urban area around the city of Regensburg,
Germany (about 5 km
2
in size) was extracted from
OpenStreetMap and prepared using netconvert,
randomTrips, and polyconvert for SUMO (Kra-
jzewicz et al., 2012) and Veins. The chosen area in-
cludes all the different aspects of an urban area. To
present realistic results, we use SimpleObstacleShad-
owing included in Veins to simulate radio interference
due to obstacles. For the sake of simplicity, we dis-
abled WAVE channel switching in our simulation, al-
though, HGM is designed to work with different chan-
nels.
A number of parameters influence the system.
Relevant parameters for simulation and evaluation are
θ
π
= 3, θ
P
= 5, θ
T
= 3, ρ
U,b
= 0, ρ
G,o
= 0, ρ
G, j
= 1,
∆t
G,c
= 20 s, ∆t
G,v
= 80 s, ∆t
G,i
= 60 s, and ∆t
M,b
= 1 s.
Harmonized Group Mix for ITS
159

Table 1: List of security threats and how HGM protects against them.
Role
Participant Group Leader Tracer
Attack
Alter
σ prevents to change or
ts. Pointing to another group
by changing id(g) points to
other group key.
Forging any key parameters to track
an individual during group join is eas-
ily detectable by a user via the public
group key directory which shows the
same attributes for each group.
Altering any MESSAGE-
BLAMEREQ is not possible
since these requests are
always initiated by LEA.
Suppress
No effect since messages are
relayed by all participants
(cf. Mesh networks).
Group creation or join fails automati-
cally once a timeout is exceeded.
Not responding to a blame
MESSAGEBLAMEREQ is
implicitly a MESSAGE-
BLAMEDENIAL.
Replay
Intended since each message
is unique via its H (σ) and
HGM uses relaying tech-
niques.
Using another user’s π to join another
group is not possible because of a zero
knowledge proof. Resending key pa-
rameters during create or join is im-
possible since recipient may not know
the respective secrets.
Each tracer only has
one vote (either MES-
SAGEBLAMEACCEPT or
MESSAGEBLAMEDENIAL),
successive responses may be
discarded.
Inject
Blame of bogus messages
will eventually remove them.
Group leader can violate θ
P
and/or
θ
T
. He can either track a user by per-
forming an n − 1 attack or create a
group without LEA as a tracer or any
other independent tracers. As a conse-
quence each blame request will even-
tually fail. Such a rogue group can
be easily identified by LEA with the
group leader being ultimately respon-
sible for it.
Sending either MESSAGE-
BLAMEACCEPT or MES-
SAGEBLAMEDENIAL with-
out a proper MESSAGE-
BLAMEREQ has no effect.
If not otherwise stated, the defaults are used. To
ensure that enough vehicles are in the simulation, a
warm-up period of 10 min is preceded. Key statistics
are tracked after the warm-up period for a duration of
another 10 min. Every second a vehicle spawns and
drives along a random path. To ensure the accuracy
of the results, every parameter configuration is run at
least five times and afterwards the mean of the results
is calculated.
5.1 Privacy
We measure privacy using two metrics mentioned
by (Wagner and Eckhoff, 2018). Of interest is the
anonymity set size, which describes ”the set of users
that the adversary cannot distinguish from u” (Wag-
ner and Eckhoff, 2018). Furthermore, the size of un-
certainty region illustrates “the minimal size of the
region R
U
to which an adversary can narrow down
the position of a target user u” (Wagner and Eckhoff,
2018).
In theory, the anonymity set size is at least θ
P
.
Therefore, it would be wise to choose θ
P
as big as
possible. However, from a performance perspective,
the upper bound of θ
P
is limited since larger groups
are more unlikely to be successfully created. Thus,
our algorithm allows subsequent group joins, subse-
quently increasing the anonymity set size. The simu-
lation helps to balance these conflicting interests. To
extract feasible values, we track the sender of a pay-
load message (called safety beacons in the simulation)
and his group affiliation. On that, we derive the ra-
tio of messages sent by a user in comparison to all
messages sent by the affiliated group called multitude
of messages. Also, we count the average number of
users within each group (|U
g
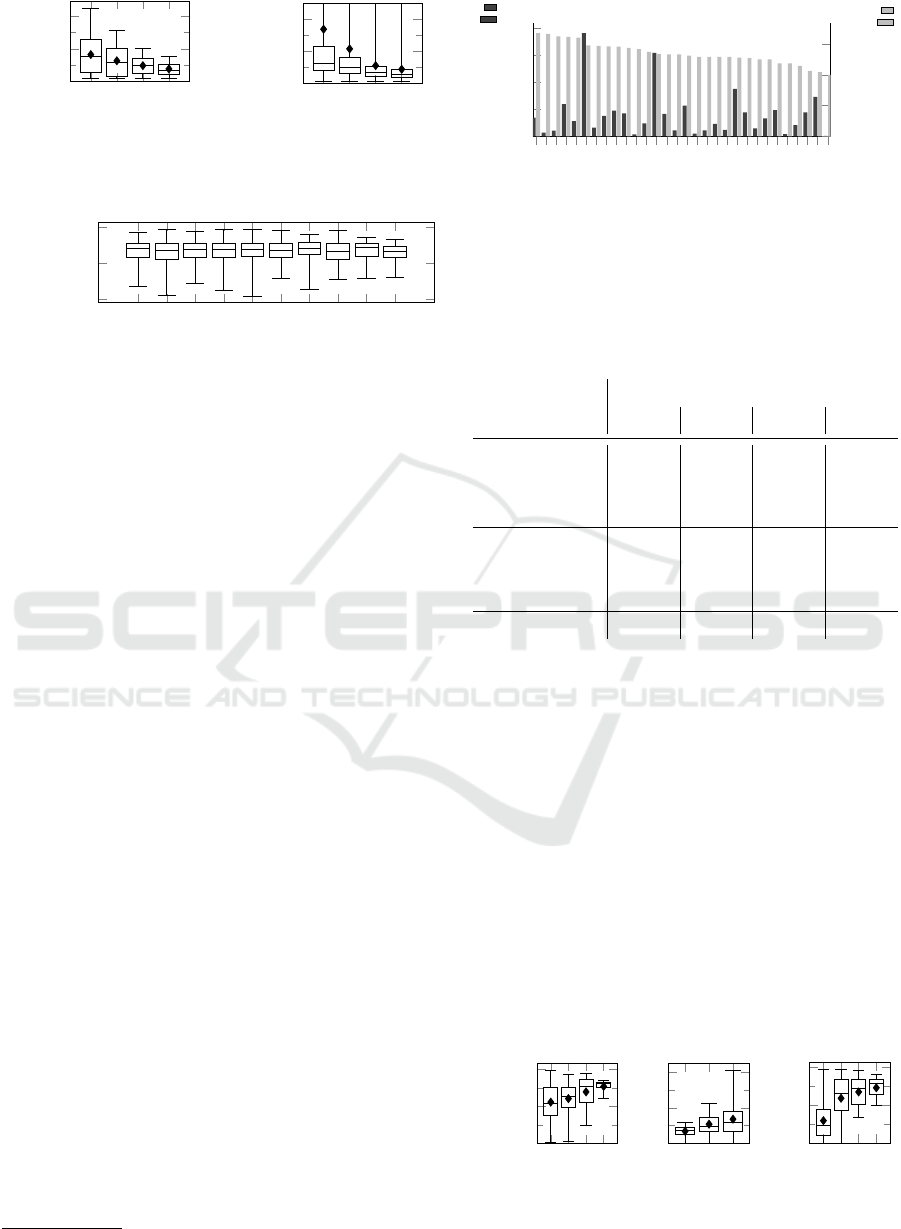
|). As Figure 7 illus-
trates, there is a direct correlation between ∆t
M,b
and
these parameters indicating that low values for ∆t
M,b
are to prefer.
To gain insight into the size of uncertainty region,
we collect payload messages sent by users U
g
i
of
a group g
i
. With the help of the Gauss’s area for-
mula, we calculate the region span of U
g
i
which sent
a safety beacon message at the same time. However,
this yields just the minimum of the uncertainty region
because not all u ∈ U
g
i
may have send a safety bea-
ICISSP 2020 - 6th International Conference on Information Systems Security and Privacy
160
1 2 3 4
0
10
20
∆t
M,b
[sec]
|U
g
| [#]
1 2 3 4
0
20
40
∆t
M,b
[sec]
multitude
of m
Figure 7: Anonymity set size defined by the user who send
a safety beacon message under the same group ID.
3 4 5 6
7
8 9 10 11 12
10
0
10
3
10
6
θ
P
[#]
uncertainty
region [m
2
]
Figure 8: Boxplot of the uncertainty region.
con message using that specific group g
i
. Figure 8
shows that we can choose θ
P
small because the uncer-
tainty region stays more or less constant with a de-
crease of θ
P
.
Figure 9 plots the influence of parameters ∆t
G,c
,
∆t
G,i
, and ∆t
G,v
, on the percentage of the time
2
a user
is able to sent messages on behalf of a group and the
uncertainty region. We can see that there is no cor-
relation between the uncertainty region and the per-
centage of active time. To determine the parameters
which have an impact on the uncertainty region, we
calculated the correlation coefficient between all rele-
vant parameters in our simulation and the uncertainty
region. We reason that none of the considered param-
eters have a nonambiguous effect on the uncertainty
region. The movement of vehicles may have a more
significant impact than the presented parameters.
5.2 Performance
To depict the overhead of HGM, we list in Table 2
the distribution of messages types in relation to ∆t
M,b
.
Most received messages are payload messages. With
bigger ∆t
M,b
decreases their percentage because the
group setup phases take more time and the users can
send fewer payload messages.
Figure 10 shows the time for group creation ∆t in
relation to different parameters. It shows that increas-
ing ∆t
M,b
∆t
G,c
, or θ
P
also increases ∆t. However, this
does not come as a surprise, since for instance search-
ing for more members depends on the density of cars
which was constant during our simulation.
Figure 11 illustrates HGM’s robustness because
even when 90% of the vehicles in the simulation are
2
In relation to the user’s overall simulation lifetime.
30, 10, 120
60, 10, 120
60, 30, 60
60, 10, 60
30, 10, 90
60, 10, 90
60, 30, 90
30, 30, 90
60, 60, 90
15, 10, 120
60, 60, 60
15, 120, 120
30, 120, 120
60, 10, 45
60, 30, 30
60, 30, 45
60, 30, 120
60, 60, 120
30, 60, 120
30, 10, 60
60, 10, 30
15, 60, 120
15, 60, 90
30, 30, 120
15, 30, 120
30, 60, 90
30, 30, 60
60, 120, 120
15, 30, 60
15, 10, 90
0
2
4
6
8
·10
4
Parameter setting
region size [m
2
]
0
0.2
0.4
0.6
active time [%]
Figure 9: The influence of ∆t
G,c
, ∆t
G,i
, ∆t
G,v
on the per-
centage of the users active group time, and the uncertainty
region in m
2
.
Table 2: Distribution of messages types in relation to ∆t
M,b
.
∆t
M,b
1 [%] 2 [%] 3 [%] 4 [%]
received
payload 39.28 50.87 43.18 29.26
broadcast 43.97 34.73 37.76 45.19
direct 0.99 0.87 0.71 0.49
send
payload 3.70 3.57 2.32 1.04
broadcast 1.26 0.97 0.99 0.99
direct 4.09 4.50 6.98 10.34
LEA 6.71 4.49 8.05 12.68
blocked, groups with θ
P
= 5 are created and on aver-
age at least 5 participants send a message under the
same id(g).
6 CONCLUSION AND FUTURE
WORK
In this paper we presented a privacy enhanced ap-
proach for V2V communication which can be used
with current standards like WAVE. HGM uses a state-
of-the-art group signature scheme feasible for the
tight requirements of ITSs. It only relies on a semi-
trusted entity called LEA and apart from that, is fully
1 2 3 4
0
10
20
∆t
M,b
[sec]
∆t [sec]
15 30 60
0
25
50
∆t
G,c
[sec]
3 6 9 12
0
10
20
θ
P
[#]
Figure 10: Time for group creation ∆t is correlated to mul-
tiple parameters.
Harmonized Group Mix for ITS
161

0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
0
10
20
ρ
U,b
|U
g
| [#]
Figure 11: The anonymity set size in dependence of the
probability of blocked users.
decentralized. We tackle to balance both require-
ments, privacy and integrity.
Our evaluation was done with Veins showing that
HGM improves the privacy of users by hiding them
along with other members in regions with uniform
probability. Among other things, the results also show
that our approach is robust in terms of dishonest par-
ticipants who suppress messages. We also show that
the overhead related to HGM is acceptable.
In future work we would like to extend our anal-
ysis to a more realistic scenario such as (Codeca
et al., 2016). We want to increase performance using
WAVE’s channel switching in the simulation. In addi-
tion, we want to strengthen our attacker by including
external knowledge such as derived user behavior and
analyze tracers.
ACKNOWLEDGEMENTS
This research was partly funded by the German Fed-
eral Ministry of Education and Research (BMBF)
with grant number: 16KIS0367K.
REFERENCES
Alexiou, N., Lagan
`
a, M., Gisdakis, S., Khodaei, M., and
Papadimitratos, P. (2013). VeSPA. In Proceedings
of the 2nd ACM workshop on Hot topics on wireless
network security and privacy - HotWiSec ’13, page 19,
New York, New York, USA. ACM Press.
Bilgin, B. E. and Gungor, V. C. (2013). Performance
Comparison of IEEE 802.11p and IEEE 802.11b for
Vehicle-to-Vehicle Communications in Highway, Ru-
ral, and Urban Areas. International Journal of Vehic-
ular Technology, 2013:1–10.
Bl
¨
omer, J., Juhnke, J., and L
¨
oken, N. (2016). Short group
signatures with distributed traceability. In Mathemat-
ical Aspects of Computer and Information Sciences.
MACIS 2015. Lecture Notes in Computer Science, vol-
ume 9582, pages 166–180. Springer, Cham.
Boneh, D., Boyen, X., and Shacham, H. (2004). Short
group signatures. In Franklin, M., editor, Advances
in Cryptology – CRYPTO 2004, pages 41–55, Berlin,
Heidelberg. Springer Berlin Heidelberg.
Brecht, B., Therriault, D., Weimerskirch, A., Whyte, W.,
Kumar, V., Hehn, T., and Goudy, R. (2018). A secu-
rity credential management system for V2X commu-
nications. CoRR, abs/1802.05323.
Calandriello, G., Papadimitratos, P., Hubaux, J.-P., and
Lioy, A. (2007). Efficient and robust pseudonymous
authentication in VANET. In Proceedings of the
Fourth ACM International Workshop on Vehicular Ad
Hoc Networks, VANET ’07, pages 19–28, New York,
NY, USA. ACM.
Camenisch, J. (1997). Efficient and generalized group
signatures. In Advances in Cryptology – EURO-
CRYPT ’97. EUROCRYPT 1997. Lecture Notes in
Computer Science, volume 1233, pages 465–479.
Springer, Berlin, Heidelberg.
Chaum, D. and Van Heyst, E. (1991). Group signatures.
In Advances in Cryptology — EUROCRYPT ’91. EU-
ROCRYPT 1991. Lecture Notes in Computer Science,
volume 547 LNCS, pages 257–265. Springer, Berlin,
Heidelberg.
Chaum, D. L. (1981). Untraceable electronic mail, return
addresses, and digital pseudonyms. Communications
of the ACM, 24(2):84–90.
Chen, L., Ng, S.-L., and Wang, G. (2011). Threshold anony-
mous announcement in vanets. IEEE Journal on Se-
lected Areas in Communications, 29:605–615.
Chen, L. and Pedersen, T. P. (1995). New group signature
schemes. In De Santis, A., editor, Advances in Cryp-
tology – EUROCRYPT’94, pages 171–181. Springer,
Berlin, Heidelberg.
Codeca, L., Frank, R., and Engel, T. (2016). Luxembourg
SUMO Traffic (LuST) Scenario: 24 hours of mobility
for vehicular networking research. In IEEE Vehicular
Networking Conference, VNC, volume 2016-January,
pages 1–8. IEEE Computer Society.
Delerabl
´
ee, C. and Pointcheval, D. (2006). Dynamic Fully
Anonymous Short Group Signatures. In VIETCRYPT
2006, pages 193–210.
Fischlin, M. (2005). Communication-Efficient Non-
interactive Proofs of Knowledge with Online Extrac-
tors. In Shoup, V., editor, Advances in Cryptology –
CRYPTO 2005, pages 152–168. Springer Berlin Hei-
delberg.
Gr
¨
afling, S., M
¨
ah
¨
onen, P., and Riihij
¨
arvi, J. (2010). Per-
formance evaluation of IEEE 1609 WAVE and IEEE
802.11p for vehicular communications. In ICUFN
2010 - 2nd International Conference on Ubiquitous
and Future Networks, pages 344–348.
Guo, J., Baugh, J. P., and Wang, S. (2007). A group sig-
nature based secure and privacy-preserving vehicu-
lar communication framework. In 2007 Mobile Net-
working for Vehicular Environments, pages 103–108.
IEEE.
Hao, Y., Cheng, Y., and Ren, K. (2008). Distributed key
management with protection against RSU compro-
mise in group signature based VANETs. In GLOBE-
COM - IEEE Global Telecommunications Conference,
pages 4951–4955. IEEE.
Hu, W., Xue, K., Hong, P., and Wu, C. (2011). Atcs:
A novel anonymous and traceable communication
scheme for vehicular Ad hoc networks. International
Journal of Network Security, 13(2):71–78.
ICISSP 2020 - 6th International Conference on Information Systems Security and Privacy
162

IEEE 1609 Working Group (2017). IEEE Guide for Wire-
less Access in Vehicular Environments (WAVE) - Ar-
chitecture. IEEE Std 1609.0-2013, pages 1–78.
Khodaei, M. and Papadimitratos, P. (2015). The Key to In-
telligent Transportation: Identity and Credential Man-
agement in Vehicular Communication Systems. IEEE
Vehicular Technology Magazine, 10(4):63–69.
Krajzewicz, D., Erdmann, J., Behrisch, M., and Bieker,
L. (2012). Recent Development and Applications of
SUMO - Simulation of Urban MObility. International
Journal On Advances in Systems and Measurements,
5(3&4):128–138.
Laurendeau, C. and Barbeau, M. (2007). Secure Anony-
mous Broadcasting in Vehicular Networks. In 32nd
IEEE Conference on Local Computer Networks (LCN
2007), pages 661–668. IEEE.
Lin, X., Sun, X., Ho, P. H., and Shen, X. (2007). GSIS:
A secure and privacy-preserving protocol for vehicu-
lar communications. IEEE Transactions on Vehicular
Technology, 56(6 I):3442–3456.
Papadimitratos, P., Buttyan, L., Hubaux, J.-P., Kargl, F.,
Kung, A., and Raya, M. (2007). Architecture for Se-
cure and Private Vehicular Communications. In 2007
7th International Conference on ITS Telecommunica-
tions, pages 1–6. IEEE.
Plossl, K., Nowey, T., and Mletzko, C. (2006). Towards a
security architecture for vehicular ad hoc networks. In
First International Conference on Availability, Relia-
bility and Security (ARES’06), pages 8 pp.–381. IEEE.
Sampigethaya, K., Huang, L., Li, M., Poovendran, Radha
Matsuura, K., and Sezaki, K. (2005). CARAVAN:
Providing location privacy for VANET. Embedded Se-
curity in Cars, pages 1–15.
Sommer, C., German, R., and Dressler, F. (2011). Bidirec-
tionally Coupled Network and Road Traffic Simula-
tion for Improved IVC Analysis. IEEE Transactions
on Mobile Computing, 10(1):3–15.
Sun, J., Zhang, C., and Fang, Y. (2007). An ID-based frame-
work achieving privacy and non-repudiation in vehic-
ular ad hoc networks. In Proceedings - IEEE Mili-
tary Communications Conference MILCOM, pages 1–
7. IEEE.
Uzcategui, R. A., De Sucre, A. J., and Acosta-Marum, G.
(2009). Wave: A tutorial. IEEE Communications
Magazine, 47(5):126–133.
Verheul, E. R. (2016). Activate later certificates for v2x -
combining its efficiency with privacy. IACR Cryptol-
ogy ePrint Archive, 2016:1158.
Wagner, I. and Eckhoff, D. (2018). Technical Privacy Met-
rics. ACM Computing Surveys, 51(3):1–38.
Xiaonan, L., Zhiyi, F., and Lijun, S. (2007). Securing ve-
hicular ad hoc networks. In Ning, P. and Du, W., edi-
tors, 2007 2nd International Conference on Pervasive
Computing and Applications, ICPCA’07, volume 15,
pages 424–429. IOS Press.
Zhang, L., Wu, Q., Solanas, A., and Domingo-Ferrer, J.
(2010). A scalable robust authentication protocol for
secure vehicular communications. IEEE Transactions
on Vehicular Technology, 59(4):1606–1617.
APPENDIX
A Notation
u Known user in the system
U Set of all users
g Existing group in the system
G Set of all groups with id(g)
U
g
Users in group g
l Group leader
t Tracer
T Set of tracers
π Pseudonym signed by LEA
Π Set of all signed pseudonyms
H Hash function
m Message
M Set of all messages
σ Signature of a message m
zk Public parameters of a zero knowledge proof
θ
T
Minimum number of tracers
θ
P
Minimum number of group users
θ
π
Maximum number of concurrent pseudonyms
of a single user
λ Proportion of tracers needed to reveal
k Length of randomness
α Percentage of dishonest users in the system
∆t
G,c
Group creation time
∆t
G,v
Group valid time
∆t
G,i
Group invition time
∆t
G,b
Blame duration time
∆t
M,b
Message safety beacon time interval
ρ
G,o
Probability of opening a group
ρ
G, j
Probability of joining a group
ρ
U,b
Probability of beeing blocked
Harmonized Group Mix for ITS
163
