
Simultaneous Object Detection and Semantic Segmentation
Niels Ole Salscheider
FZI Research Center for Information Technology, Karlsruhe, Germany
Keywords:
Autonomous Driving, Computer Vision, Deep Learning, Object Detection, Semantic Segmentation.
Abstract:
Both object detection in and semantic segmentation of camera images are important tasks for automated ve-
hicles. Object detection is necessary so that the planning and behavior modules can reason about other road
users. Semantic segmentation provides for example free space information and information about static and
dynamic parts of the environment. There has been a lot of research to solve both tasks using Convolutional
Neural Networks. These approaches give good results but are computationally demanding. In practice, a com-
promise has to be found between detection performance, detection quality and the number of tasks. Otherwise
it is not possible to meet the real-time requirements of automated vehicles. In this work, we propose a neural
network architecture to solve both tasks simultaneously. This architecture was designed to run with around
10 Hz on 1 MP images on current hardware. Our approach achieves a mean IoU of 61.2% for the semantic
segmentation task on the challenging Cityscapes benchmark. It also achieves an average precision of 69.3%
for cars and 67.7% for pedestrians on the moderate difficulty level of the KITTI benchmark.
1 INTRODUCTION
Automated vehicles need a detailed perception of
their environment in order to drive safely. Camera im-
ages contain the most information compared to data
from other sensors like lidar or radar. Automated ve-
hicles are therefore usually equipped with cameras
and try to make use of this information as much as
possible. However, image processing with neural net-
works requires a lot of computing power. In practice
this means that compromises are necessary during the
design of an automated vehicle: It is not possible to
use huge neural networks due to real-time constraints,
even if they are the best-performing ones. It also is
not possible to execute different neural networks for
every imaginable task at the same time.
Two common tasks in environment perception
from camera images are object detection and seman-
tic segmentation. Object detection is a corner stone
of an automated vehicle. The behavior generation
and planning modules need to reason about objects
and their future behavior. Especially other road users
and infrastructure elements like traffic signs and traf-
fic lights are of interest here. This task can be solved
using Convolutional Neural Networks like SSD (Liu
et al., 2016), YOLO (Redmon et al., 2016; Redmon
and Farhadi, 2017; Redmon and Farhadi, 2018) or
Faster R-CNN (Ren et al., 2015).
But also semantic segmentation plays an impor-
tant role in an automated vehicle. It can for exam-
ple be used to validate that the planned trajectory lies
within the drivable area (i. e. on the road surface).
If the information about the road geometry is not
stored in a map, lanes have to be extracted online from
the camera image. Also this task can be solved us-
ing semantic segmentation (Meyer et al., 2018). An-
other application for semantic segmentation is map-
ping and localization: Only static parts of the envi-
ronment should be mapped or compared to an existing
map. The segmentation map can be used to mask all
dynamic parts. Popular examples of neural networks
for semantic segmentation include DeepLab v3 (Chen
et al., 2018) and PSPNet (Zhao et al., 2017).
Both object detection and semantic segmentation
have been extensively researched. While current ap-
proaches do not yet reach human-level performance
they are getting close and their accuracy continues to
increase. They also provide valuable information for
automated vehicles. It is therefore important to run
these two tasks in parallel while satisfying all real-
time constraints.
In this work we present a neural network architec-
ture that solves these tasks jointly. It was designed to
achieve a framerate of around 10 Hz on 1 MP images
on current hardware.
Salscheider, N.
Simultaneous Object Detection and Semantic Segmentation.
DOI: 10.5220/0009142905550561
In Proceedings of the 9th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2020), pages 555-561
ISBN: 978-989-758-397-1; ISSN: 2184-4313
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
555

2 RELATED WORK
There is a lot of research on different approaches to
object detection and semantic segmentation. The fol-
lowing section can only give an overview over the
most important and recent approaches.
Object detection approaches can be separated into
proposal-based ones and proposal-free ones. A well-
known proposal-based approach is Faster R-CNN
(Ren et al., 2015) and its predecessors R-CNN (Gir-
shick et al., 2014) and Fast R-CNN (Girshick, 2015).
These approaches first generate object proposals and
then predict for each proposal if it is an object or not.
Faster R-CNN generates these proposals using a Re-
gion Proposal Network while its predecessors use Se-
lective Search (van de Sande et al., 2011) to do so. In
the case of Faster R-CNN, this Region Proposal Net-
work is a Convolutional Neural Network that takes the
whole image as input. For each proposal, the CNN
features of the proposed Region of Interest are re-
shaped using a pooling layer and then fed into two
heads. One classifies the proposal and decides if it
is an object or not. The other regresses the bounding
box.
Proposal-based approaches give good results
but they are usually slower than proposal-free ap-
proaches. One notable example of the latter category
is SSD (Liu et al., 2016). It’s design is based on the
idea of anchor boxes. The output space is discretized
into a fixed set of anchor boxes with different scales
and aspect ratios for each feature map location. The
authors use feature maps with different resolutions to
capture objects of different sizes. During inference,
the network predicts scores for each anchor box that
indicate if the anchor box contains an object of a spe-
cific class. It also gives a regression of the bounding
box offset relative to the anchor box. Finally, non-
maxima suppression is applied to all predicted bound-
ing boxes.
YOLO (Redmon et al., 2016) splits the image into
a grid and performs object detection in each cell. For
each grid cell the network outputs a fixed number of
bounding boxes with class probabilities and bound-
ing box regression. For the successors (Redmon and
Farhadi, 2017; Redmon and Farhadi, 2018), the au-
thors remove the fully connected layers for direct box
regression and replace them by anchor boxes.
Another proposal-free approach is RetinaNet (Lin
et al., 2017). It draws from the ideas of other detec-
tion approaches to build a simple model. The authors
propose a new loss function called Focal Loss that can
deal with the high foreground-background imbalance
without sampling. With this, the comparatively sim-
ple model can achieve state-of-the-art performance.
Pixel-wise semantic segmentation with CNNs be-
came popular when FCN (Long et al., 2015) started
to use fully convolutional networks. SegNet (Badri-
narayanan et al., 2017) then introduced an encoder-
decoder structure to produce high-resolution segmen-
tation maps. Popular examples that achieve state-of-
the-art results include PSPNet (Zhao et al., 2017) and
DeepLab v3 (Chen et al., 2018). Both employ a form
of spatial pyramid pooling to capture context at dif-
ferent scales.
In recent years, multi-task learning has gained
more popularity. Solving multiple tasks at once does
not only reduce the computational demand compared
to solving them sequentially. The different training
objectives can also act as regularizers that make the
model generalize better. The model is encouraged to
learn more generic features that help to solve all tasks
(Baxter, 2000).
There has also been work on joint learning of se-
mantic segmentation and object detection. In (Uhrig
et al., 2016), the authors describe an approach to in-
stance segmentation using multi-task learning. For
each pixel they predict the class label, depth and the
direction to the next instance center using a single
neural network. They then decode the instance masks
from this representation.
Recently, two approaches that are similar to ours
have been published (Teichmann et al., 2018; Sistu
et al., 2019). Both learn segmentation and object de-
tection in a multi-task setting. However, (Teichmann
et al., 2018) only predicts a road segmentation. The
network structure proposed in (Sistu et al., 2019) is
considerably simpler and smaller. As a consequence,
the inference time of their neural network is much
lower but the accuracy is also notably worse.
3 APPROACH
In the following we will first present the design of
our proposed neural network. In the next sub-section
we will give the training details. The code that was
used to perform the experiments in this work will be
available as open source software soon
1
.
3.1 Network Design
In this work we propose a network structure for simul-
taneous semantic segmentation and object detection.
The backbone of our model is based on ResNet-38
(Wu et al., 2016). The structure of the backbone is
1
https://github.com/fzi-forschungszentrum-informatik/
NNAD
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
556
Input image
Conv. (7x7, 64 channels, stride 2)
ReLu
Batch Normalization
ResNet mod. (64 channels)
Maxpooling (2x2)
ResNet mod. (64 channels)
ResNet mod. (64 channels)
ResNet mod. (128 channels)
Maxpooling (2x2)
ResNet mod. (128 channels)
ResNet mod. (128 channels)
ResNet mod. (128 channels)
ResNet mod. (256 channels, 2x dilation)
ResNet mod. (256 channels, 2x dilation)
ResNet mod. (256 channels, 2x dilation)
ResNet mod. (512 channels, 4x dilation)
ResNet mod. (512 channels, 8x dilation)
ResNet mod. (512 channels, 4x dilation)
Backbone output
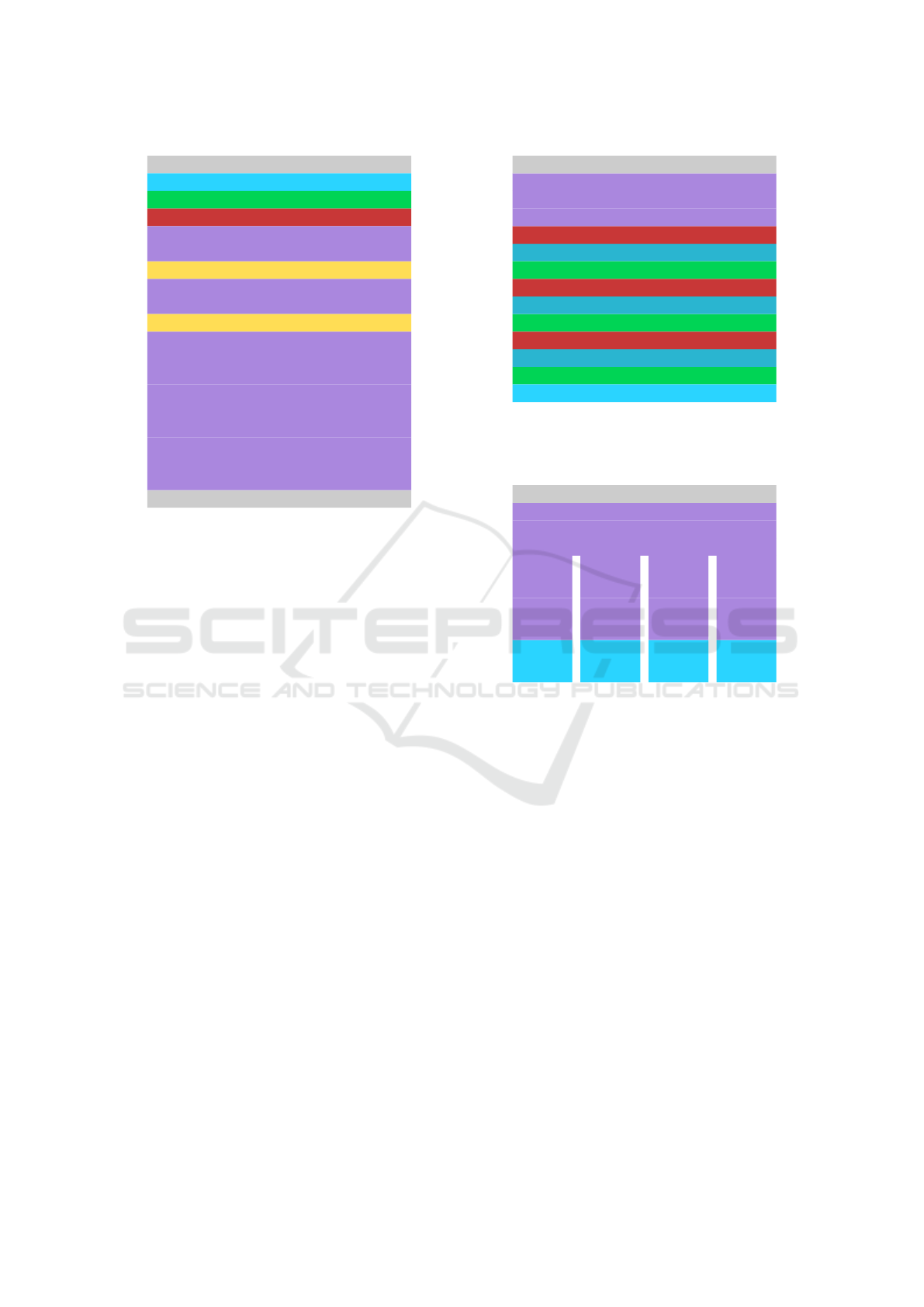
Figure 1: Structure of the proposed backbone for simul-
taneous semantic segmentation and object detection. The
ResNet modules have the same structure that is proposed in
(He et al., 2016) but use depthwise separable convolutions
to reduce the computational demand.
visualized in Figure 1. The ResNet modules have the
same structure that is proposed in (He et al., 2016).
But like Xception (Chollet, 2017), we use depthwise
separable convolutions to reduce the computational
demand.
The path for semantic segmentation has a convolu-
tional encoder-decoder structure. In the first layers of
the encoder, the data tensor is sampled down by a fac-
tor of 8: The first convolution has a stride of two and
there are two maxpooling layers that both downsam-
ple by a factor of two. This reduction of resolution
is necessary to decrease the computational demand of
the network. But after this reduction we use dilated
convolutions as proposed in (Chen et al., 2017). This
increases the receptive field of the convolutions while
preserving spatial details and while keeping the num-
ber of learnable parameters constant.
The output of the backbone is then fed into mul-
tiple network heads. One head is the semantic seg-
mentation head. It is visualized in Figure 2. After
three more ResNet modules the data tensor is upsam-
pled again so that the final segmentation map has the
same resolution as the input image. This is done us-
ing three transposed convolutions that each learn to
upsample by a factor of 2. An alternative would be
to upsample by a factor of 8 with just one transposed
convolution. But this way we can gradually reduce
the number of channels while increasing the spatial
Transposed Conv. (2x upsample, 128 channels)
ReLu
Batch Normalization
ResNet mod. (512 channels)
ResNet mod. (512 channels)
ResNet mod. (512 channels)
ReLu
Batch Normalization
ReLu
Batch Normalization
Conv. (1x1)
Transposed Conv. (2x upsample, 64 channels)
Transposed Conv. (2x upsample, 32 channels)
Backbone output
Figure 2: Structure of the network head for semantic seg-
mentation. The data tensor is upsampled by a factor of 8 to
compensate the downsampling in the backbone.
ResNet mod. (512 channels)
ResNet mod. (512 channels)
ResNet mod. (512 channels)
Conv.
(1x1)
ResNet
(128 ch.)
ResNet
(128 ch.)
Conv.
(1x1)
ResNet
(128 ch.)
ResNet
(128 ch.)
Conv.
(1x1)
ResNet
(512 ch.)
ResNet
(512 ch.)
Conv.
(1x1)
ResNet
(128 ch.)
ResNet
(128 ch.)
Backbone output
Figure 3: Structure of the network head for object detection.
The different outputs are an objectness score, a class score,
bounding box parameters regression and a feature embed-
ding per anchor box.
resolution. The final convolution layer then reduces
the number of channels to the number of classes. Dur-
ing training, a softmax function is applied to its output
and it is trained using cross-entropy loss.
The second head of our proposed model is the
object detection head. It also takes the output of
the backbone as input and applies three more shared
ResNet modules. The output of the last shared ResNet
module is fed into four sub-networks of identical
structure but with a different number of channels.
Each consists of two more ResNet blocks and a final
convolutional layer to adjust the number of channels
for the final task.
The first sub-network solves a binary classifica-
tion problem. It predicts whether the corresponding
anchor box contains a relevant object or not. During
training, a softmax function is applied to its output.
Like RetinaNet (Lin et al., 2017) we use Focal Loss
to train this output. We chose α = 1.0 and γ = 2.0 as
Simultaneous Object Detection and Semantic Segmentation
557

Table 1: The parameters of our anchor boxes. At each lo-
cation of the feature map we generate anchor boxes for all
possible combinations of box ratio and box area.
Anchor box 0.25, 0.5, 1.0, 2.0, 4.0
ratios (w/h)
Anchor box 32, 48, 64, 96, 128, 192,
areas (in pixel) 256, 384, 512, 768, 1024,
1536, 2048, 3072, 4096,
6144, 8192, 12288, 16384,
24576, 32768, 49152, 65536,
98304, 131072, 196608,
262144, 393216, 524288
parameters.
The second sub-network also solves a classifica-
tion problem. For all anchor boxes that contain a rel-
evant object it predicts its class. Like for the semantic
segmentation head, a softmax function is applied to
its output and it is trained using cross-entropy loss for
all active anchor boxes.
The third sub-network gives the regression output
of the bounding box parameters. These parameters
are the same as in R-CNN (Girshick et al., 2014). The
parameters for the used anchor boxes can be found in
Table 1. We generate anchor boxes at each location of
the feature map for all possible combinations of box
ratio and box area. Since we only downsample by a
factor of 8 in the encoder to preserve spatial details
for the semantic segmentation task we do not have
low-resolution feature maps. In contrast to RetinaNet
(Lin et al., 2017) we therefore only predict objects on
one feature map. In order to still be able to detect
objects of different sizes, we generate more anchor
boxes with different scales. We train the output with
smooth L1 loss for all active anchor boxes.
The fourth sub-network is optional. If desired it
can be used to learn a feature embedding for each de-
tected object. We include it here because it is use-
ful for some applications and we will use it in future
work. The feature embedding is trained using con-
trastive loss (Hadsell et al., 2006) for all active anchor
boxes. Since we train the network on single images
and not sequences all training examples come from
one image. We use all anchor boxes that correspond
to the same object as positive examples and all that
correspond to other objects as negative examples.
3.2 Training Procedure
We train our model on the Cityscapes dataset (Cordts
et al., 2016). It contains 5 000 finely annotated and
20 000 coarsely annotated training images. In order
to train the object detection head we extract bounding
boxes from the available instance labels. We do this
by taking the minimum and maximum of the x- and
y-coordinates of the instance polygons.
Our model is trained with the Adam optimizer
(Kingma and Ba, 2014). Like (Zhao et al., 2017), we
use a polynomial decay learning rate schedule of the
following form:
lr(iter) = base lr ·
iter
max iter
0.9
We use a batch size of 8 and a base learning rate of
0.001 and run the training for 300 000 iterations.
We use the approach proposed in (Kendall et al.,
2017) to weight the different losses of the multiple
tasks. However, we had to introduce soft limits to
make sure that the weights do not become too large or
too small. Our final weighting formula therefore is:
loss
weighted,i
= exp(−s
i
) · loss
original,i
+ s
+ 1.5 · (1
R
+
(s
u,i
) · s
u,i
−1
R
−
(s
l,i
) · s
l,i
)
with s
l,i
= s
i
+ 10, s
u,i
= s
i
− 5
Here, s
i
are learnable parameters and 1(·) is the in-
dicator function. We reduced the learning rate for all
s
i
by a factor of 0.001 compared to all other weights.
These changes were necessary to keep the network
from diverging. One reason for this is that we do not
train bounding boxes for the coarsely annotated data.
If a lot of these training images are selected succes-
sively s
i
will be pushed to zero because the bounding
box loss is zero.
3.3 Bounding Box Target Generation
During training the target output of the neural network
for the bounding boxes is generated from the ground
truth bounding box list. Our procedure for this is as
follows: We initialize all anchor boxes as being “in-
active” (i. e. not corresponding to an object). Then
for each ground truth bounding box we calculate the
intersection over union with all anchor boxes. If the
IoU value is higher than 0.5 we set the anchor box to
being “active” and assign the class and regression pa-
rameters. If the IoU value is between 0.4 and 0.5 we
set the anchor box to “don’t care”. This ensures that
we do not get high losses and oscillating behavior for
anchor boxes right at the threshold.
There are a few corner cases that we also take
into account: If parts of the anchor box are outside
of the image but it contains an object we set it to
“don’t care”. We do this to avoid conflicting objec-
tives for the box regression task. If a ground truth
bounding box was not assigned to any anchor box (be-
cause there is none with an IoU higher than 0.5) but
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
558
?
?
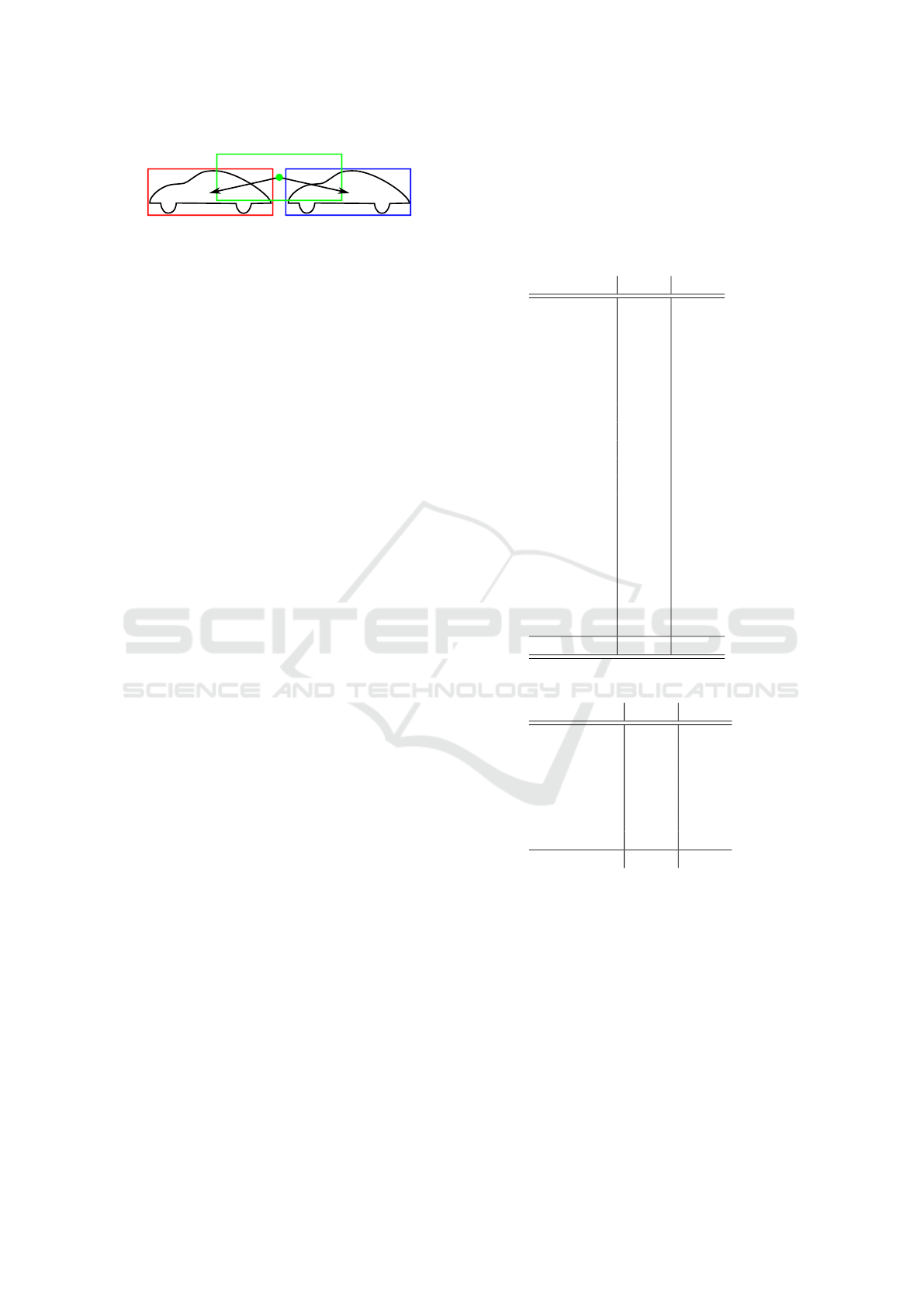
Figure 4: The green anchor box has high overlap with two
objects and would be “active” for both. Since both would
compete in the training objective for the box regression tar-
get the learned displacement would average out. There-
fore the decoded box would not align with any of the true
bounding boxes (red and blue) but would be in the middle.
We avoid this problem by setting these problematic anchor
boxes to “inactive” during training.
there is an anchor box with IoU higher than 0.4 we as-
sign it to this. This helps to also detect small objects
that fall between the grid. In case an anchor box can
be assigned to multiple ground truth bounding boxes
we choose the one with the highest IoU. But if the
absolute difference between the highest and the sec-
ond highest IoU value is less than 0.2 and both are
higher than 0.4 we set the anchor box to “inactive”.
This helps to ensure that objects are clearly separated.
We found that otherwise the regression output is just
the average of the displacements for all overlapping
objects. This means that the decoded bounding box
ends up being between the adjacent objects. It then is
too far away from all of them to be suppressed by the
non-maxima suppression. The problem is illustrated
in Figure 4.
4 EVALUATION
We train and evaluate our proposed neural network ar-
chitecture on the Cityscapes benchmark (Cordts et al.,
2016). The results for the semantic segmentation task
can be found in Table 2.
We evaluate the performance of our bounding box
detector for the “car” and “pedestrian” classes with
the official evaluation tool of the KITTI benchmark
(Geiger et al., 2012). The results can be found in Fig-
ure 5. Since we train the model with the Cityscapes
dataset we also want to evaluate on this dataset. It
however lacks annotations for the level of truncation
and occlusion. We therefore ignore these values dur-
ing the evaluation, making the task harder. But since
the images from the Cityscapes dataset have a higher
resolution than the ones from the KITTI dataset we
adjusted the size limits for the evaluation difficulty
levels. Here, we require a minimum width and height
of 10 for the “hard” difficulty level, 50 for the “mod-
erate” difficulty level and 100 for the “easy” difficulty
level. Because of these differences the results are
not comparable with the ones achieved on the KITTI
Table 2: Results of the semantic segmentation on the
Cityscapes validation dataset. The results have been com-
puted with the official evaluation script. The IoU metric is
the intersection-over-union metric used by PASCAL VOC
(Everingham et al., 2015). The iIoU metric is computed by
weighting each pixel with the ratio of the average instance
size and the size of the ground truth instance size.
Class IoU iIoU
road 0.963 -
sidewalk 0.736 -
building 0.868 -
wall 0.347 -
fence 0.385 -
pole 0.459 -
traffic light 0.498 -
traffic sign 0.625 -
vegetation 0.886 -
terrain 0.517 -
sky 0.905 -
person 0.711 0.518
rider 0.456 0.310
car 0.903 0.809
truck 0.381 0.212
bus 0.614 0.381
train 0.347 0.176
motorcycle 0.350 0.261
bicycle 0.653 0.462
Average 0.612 0.395
(a) Per-class results.
Category IoU iIoU
flat 0.977 -
construction 0.872 -
object 0.530 -
nature 0.887 -
sky 0.905 -
human 0.721 0.543
vehicle 0.881 0.774
Average 0.825 0.658
(b) Per-category results.
dataset. But we hope that these are useful values that
can be used in future work for comparisons on the
Cityscapes dataset.
Especially the “car” class has many examples with
high occlusion levels in the Cityscapes dataset. This
explains the low recall in the “hard” difficulty level
for this class.
We also evaluate the object detection performance
on the KITTI dataset. Herw we follow the official
definitions of the difficulty levels from KITTI. The
results can be found in Figure 6. We randomly select
5 930 images from the KITTI training dataset to form
Simultaneous Object Detection and Semantic Segmentation
559
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
Precision
Recall
Car
Easy
Moderate
Hard
(a) Car class.
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
Precision
Recall
Pedestrian
Easy
Moderate
Hard
(b) Pedestrian class.
Class
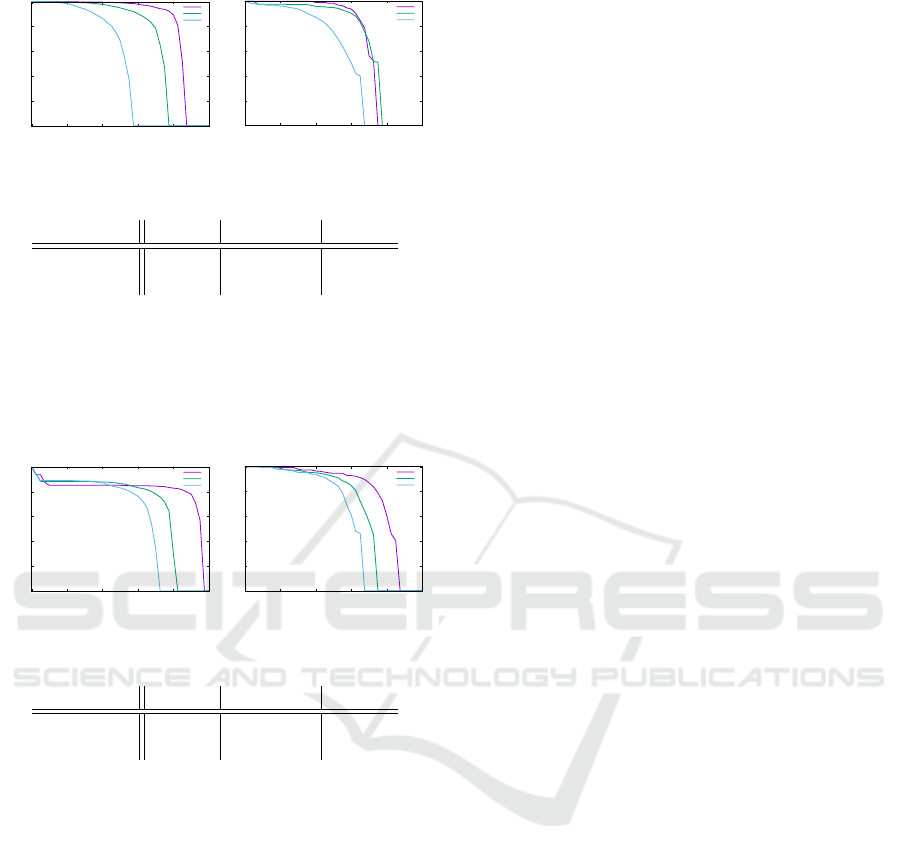
Easy Moderate Hard
Car 84.5% 72.3% 50.9%
Pedestrian 70.9% 70.8% 56.5%
(c) Average Precision values.
Figure 5: Results of the object detection on the Cityscapes
validation dataset. It uses the KITTI evaluation tool but with
an adjusted definition of the difficulty levels that is better
suited for Cityscapes.
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
Precision
Recall
Car
Easy
Moderate
Hard
(a) Car class.
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
Precision
Recall
Pedestrian
Easy
Moderate
Hard
(b) Pedestrian class.
Class Easy Moderate Hard
Car 82.1% 69.3% 60.2%
Pedestrian 79.5% 67.7% 60.1%
(c) Average Precision values.
Figure 6: Results of the object detection on the KITTI vali-
dation dataset. Here we follow the official definition of the
difficulty levels.
a validation dataset. Then we mix the remaining im-
ages with the Cityscapes training images and fine-tun
our model with that. One problem is that the gener-
ated bounding box labels from the Cityscapes dataset
and the labels from the KITTI dataset are not consis-
tent: While the generated bounding boxes cover only
the visible parts of each object the labels from the
KITTI dataset cover the projection of the whole ob-
ject. This explains the drop in precision for the “car”
class even for detection thresholds with low recall.
It also means that we observe lower recall at detec-
tion thresholds with low precision. Another issue is
that the images from the KITTI dataset have a lower
resolution while we tuned our model for the notably
higher resolution of the Cityscapes dataset. These re-
sults are therefore not directly comparable with a de-
tector that is only trained on the KITTI dataset. They
however give a lower bound for the expected perfor-
mance.
Our proposed architecture does not reach the level
of accuracy that is achieved by the best-performing
approaches on the Cityscapes and KITTI leader-
boards at the time of writing. It however gives good
accuracy while meeting the desired computation time
constraints. The inference time of the proposed con-
volutional neural network for images at the desired
resolution of 1 MP is 102 ms on an Nvidia Titan V
GPU. We measured this time using TensorFlow 1.13
and Nvidia TensorRT 5.1.2.2 RC at a precision of
16 bit.
5 CONCLUSION AND OUTLOOK
We demonstrate that two important vision tasks for
automated vehicles (semantic segmentation and ob-
ject detection) can be learned jointly by a single CNN.
We present a suitable neural network architecture for
this which takes the needs of both tasks into account.
It does not achieve the level of accuracy that the
the best-performing models offer today. However, it
gives good accuracy while meeting the run-time con-
straints of the application: Our approach achieves the
design goal of a framerate of 10 Hz on 1 MP images.
We currently use the presented approach in our re-
search vehicle. The semantic segmentation gives in-
formation about the static and dynamic parts of the
world. This information is useful for mapping where
we only want to map the static parts. It can also be
used for mapless driving or freespace validation. The
object detections are fused with detections from other
sensors and then used by the behavior and trajectory
planning modules.
We will focus on further reducing the run-time of
our object detection head without losing accuracy. In
future work we will present a tracking approach for
road users that is based on this work.
REFERENCES
Badrinarayanan, V., Kendall, A., and Cipolla, R. (2017).
SegNet: A Deep Convolutional Encoder-Decoder Ar-
chitecture for Image Segmentation. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence.
Baxter, J. (2000). A Model of Inductive Bias Learning.
Journal of Artificial Intelligence Research.
Chen, L.-C., Papandreou, G., Schroff, F., and Adam, H.
(2017). Rethinking Atrous Convolution for Semantic
Image Segmentation.
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
560

Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., and
Adam, H. (2018). Encoder-Decoder with Atrous Sep-
arable Convolution for Semantic Image Segmentation.
In Proceedings of the European Conference on Com-
puter Vision (ECCV).
Chollet, F. (2017). Xception: Deep Learning with Depth-
wise Separable Convolutions. In Proceedings of the
IEEE Conference on Computer Vision and Pattern
Recognition.
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The Cityscapes Dataset for Semantic Ur-
ban Scene Understanding. In Proc. of the IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR).
Everingham, M., Eslami, S. A., Van Gool, L., Williams,
C. K., Winn, J., and Zisserman, A. (2015). The Pas-
cal Visual Object Classes Challenge: A Retrospective.
International Journal of Computer Vision.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for Autonomous Driving? The KITTI Vision Bench-
mark Suite. In Conference on Computer Vision and
Pattern Recognition (CVPR).
Girshick, R. (2015). Fast R-CNN. In Proceedings of the
IEEE Conference on Computer Vision and Pattern
Recognition.
Girshick, R., Donahue, J., Darrell, T., and Malik, J. (2014).
Rich feature hierarchies for accurate object detection
and semantic segmentation. In Proceedings of the
IEEE Conference on Computer Vision and Pattern
Recognition.
Hadsell, R., Chopra, S., and LeCun, Y. (2006). Dimension-
ality Reduction by Learning an Invariant Mapping. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Identity
Mappings in Deep Residual Networks. In European
Conference on Computer Vision.
Kendall, A., Gal, Y., and Cipolla, R. (2017). Multi-
Task Learning Using Uncertainty to Weigh Losses for
Scene Geometry and Semantics. CoRR.
Kingma, D. P. and Ba, J. (2014). Adam: A Method for
Stochastic Optimization.
Lin, T.-Y., Goyal, P., Girshick, R. B., He, K., and Doll
´
ar,
P. (2017). Focal Loss for Dense Object Detection. In
ICCV. IEEE Computer Society.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016). SSD: Single Shot
MultiBox Detector. In European Conference on Com-
puterVision.
Long, J., Shelhamer, E., and Darrell, T. (2015). Fully Con-
volutional Networks for Semantic Segmentation. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition.
Meyer, A., Salscheider, N. O., Orzechowski, P., and Stiller,
C. (2018). Deep Semantic Lane Segmentation for
Mapless Driving.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You Only Look Once: Unified, Real-Time
Object Detection. In Proceedings of the IEEE Confer-
ence on Computer Vision and Pattern Recognition.
Redmon, J. and Farhadi, A. (2017). YOLO9000: Better,
Faster, Stronger. In Proceedings of the IEEE Confer-
ence on Computer Vision and Pattern Recognition.
Redmon, J. and Farhadi, A. (2018). YOLOv3: An Incre-
mental Improvement.
Ren, S., He, K., Girshick, R. B., and Sun, J. (2015). Faster
R-CNN: Towards Real-Time Object Detection with
Region Proposal Networks. CoRR.
Sistu, G., Leang, I., and Yogamani, S. (2019). Real-time
Joint Object Detection and Semantic Segmentation
Network for Automated Driving.
Teichmann, M., Weber, M., Zoellner, M., Cipolla, R., and
Urtasun, R. (2018). MultiNet: Real-time Joint Seman-
tic Reasoning for Autonomous Driving. In 2018 IEEE
Intelligent Vehicles Symposium (IV).
Uhrig, J., Cordts, M., Franke, U., and Brox, T.
(2016). Pixel-Level Encoding and Depth Layering for
Instance-Level Semantic Labeling. In GCPR.
van de Sande, K. E. A., Uijlings, J. R. R., Gevers, T., and
Smeulders, A. W. M. (2011). Segmentation as Selec-
tive Search for Object Recognition. In ICCV.
Wu, Z., Shen, C., and van den Hengel, A. (2016). Wider
or Deeper: Revisiting the ResNet Model for Visual
Recognition.
Zhao, H., Shi, J., Qi, X., Wang, X., and Jia, J. (2017). Pyra-
mid Scene Parsing Network. In CVPR. IEEE Com-
puter Society.
Simultaneous Object Detection and Semantic Segmentation
561
