
Supervised Hardware/Software Partitioning Algorithms for FPGA-based
Applications
Belhedi Wiem and Hannachi Marwa
Department of Research, Altran Technologies, France
Keywords:
Hardware/Software Partitioning, Linear Regression, Logistic Regression, Support Vector Machine (SVM),
Linear Discriminant Analysis (LDA), Deep Neural Network (DNN).
Abstract:
Real time systems require the cooperation of the reconfigurable hardware and the software in order to boost
the application performance in terms of both energy and time. However, the integration of these systems
presents a hardware/software co-design challenges in terms of both time minimization and autonomy; hence,
the importance of hardware/software partitioning algorithms.
Here, we present a selection of artificial intelligence based-approaches that we apply in order to solve the
hardware/software classification task in real-time systems. For this, the used database consists of a collection
of real experiments that were conducted in Altran Technologies. The tested classification algorithms include
Linear Regression model optimized with gradient descent, logistic regression, Support vector machine (SVM),
Linear Discriminant Analysis (LDA), and deep neural network (DNN).
Results show the applicability of these methods and the high accuracy of the task type decision.
1 INTRODUCTION
The rapid evolution of industrial applications poses
a unique challenge requiring high computing perfor-
mance, flexibility, energy efficiency, autonomy, and
real-time processing in order to meet the require-
ments. For this, numerous solutions were proposed to
solve the tradeoff between high computational com-
plexity and time/energy consumption for real-time ap-
plications.
In fact, processors are very efficient in data man-
agement and control, but they are less efficient in
computation and data processing because of their
sequential architecture. On the other hand, hard-
ware solutions such as Field-Programmable Gate Ar-
ray (FPGAs), Application-Specific Integrated Circuit
(ASICs) have a parallel architecture that allows them
to achieve high computing power. However, their per-
formance in the management and data control is out-
performed by the processors. Hence, the cooperation
of these hardware and software solutions in hetero-
geneous systems would boost the application perfor-
mance in terms of both energy and time (Mohamed
et al., 2018)
The heterogeneous nature of this type of systems
makes it possible to use resources adapted to each
type of request. When heavy processing is required,
such as video processing, dedicated hardware blocks
may be used while the processor is used for lighter
tasks. Unlike dedicated hardware blocks, the pro-
cessor has the advantage that it can be programmed
easily, thus making the system scalable. We there-
fore see a rivalry between performance and scalabil-
ity. Indeed, they allow effective treatment of certain
requests while retaining the programmable aspect of
the processor. However, they remain dedicated to
one type of treatment. Heterogeneous systems have
been successfully employed for different tasks includ-
ing real-time locating systems (Alawieh et al., 2015),
video processing (Hoozemans et al., 2019), and for
matrix multiplication, watermarking, filtering, near-
est neighborhood, and AES decryption (Rethinagiri
et al., 2015).
Despite the effectiveness of these systems, they
still require the optimization of several parameters,
such as hardware/software tasks partitioning in order
to minimize time and energy consumption.
In this paper, we propose to apply several ma-
chine learning algorithms in order to optimize Hard-
ware/Software partitioning. The selected algorithms
are the linear regression, logistic regression, support
vector machine (SVM), linear discriminant analysis
(LDA), and the deep neural network (DNN).
The remainder of this paper is organized as fol-
860
Wiem, B. and Marwa, H.
Supervised Hardware/Software Partitioning Algorithms for FPGA-based Applications.
DOI: 10.5220/0009149708600864
In Proceedings of the 12th International Conference on Agents and Artificial Intelligence (ICAART 2020) - Volume 2, pages 860-864
ISBN: 978-989-758-395-7; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

lows. Section 2 introduces the used database, and
overviews and discusses the classification algorithms.
Section 3 presents our preliminary results. Section
4 outlines our conclusions and describes our current
and future work.
2 HARDWARE/SOFTWARE
CLASSIFICATION
2.1 Database
The database is of a collection of experiments on
FPGA tasks that were conducted in Altran Technolo-
gies. As illustrated in Figure 1, it consists of several
tasks with their respective Execution time (ET), En-
ergy, Allocations together with their respective types
(Hardware or Software).
Figure 1: Database Architecture.
In the Task type (Tt), the value ”1” denotes that
the task is mapped as hardware, and ”0” denotes that
the task is software.
2.2 Linear Regression Model Optimized
with Gradient Descent
In this paper, we admit that the task type (Tt) can
be modeled as a linear function of the execution time
(ET), the energy (E), and the allocation (A) as:
y = α
1
x
1
+ α
2
x
2
+ α
3
x
3
+ b (1)
where x
1
is the execution time (ET), x
2
is the energy
(E), x
3
is the allocations (A), y is the task type (Tt),
α
1
, α
2
, α
3
are the mixing coefficients, and b is the in-
tercept. While training the regression model, it calcu-
lates the cost function which measures the Root Mean
Squared error between the predicted task type ¯y and
true one. The model targets, therefore, to minimize
the cost function defined as:
RMSE =
1
N
N
∑
i=1
( ¯y
i
− y
i
)
2
(2)
In order to minimize the cost function, the best coeffi-
cient must be found. For this, initial values of have to
be set randomly and then the model iteratively update
these values in order to minimize the cost function
until it reaches the minimum. The best values will be
then employed to predict the task type in the most ac-
curate manner it can. To do so, the gradient descent
algorithm is employed. This latter consists of a com-
monly used optimization function that adjusts weights
according to the cost error (Ruder, 2016) as:
d
dα
1
=
2
M
∑
M
i=1
−x
1i
(y
i
(α
1
x
1i
+ α
2
x
2i
+ α
3
x
3i
+ b))
d
dα
2
=
2
M
∑
M
i=1
−x
2i
(y
i
− (α
1
x
1i
+ α
2
x
2i
+ α
3
x
3i
+ b))
d
dα
3
=
2
M
∑
M
i=1
−x
3i
(y
i
− (α
1
x
1i
+ α
2
x
2i
+ α
3
x
3i
+ b))
d
db
=
2
M
∑
M
i=1
−(y
i
− (α
1
x
1i
+ α
2
x
2i
+ α
3
x
3i
+ b))
(3)
2.3 Logistic Regression
Logistic regression is the statistical technique used to
predict the relationship between inputs, that can be ei-
ther continuous or categorical, and predicts the prob-
ability that an observation falls into one of two cate-
gories (Maxwell, 2015). The logistic regression is an
extension of linear regression for classification prob-
lems. In fact, it models the probabilities for classifi-
cation problems with two possible outcomes.
The interpretation of the weights in logistic regression
differs from the interpretation of the weights in linear
regression, since the outcome in logistic regression is
a probability between 0 and 1. Hence, the weighted
sum is transformed by a logistic function to a proba-
bility.
Mathematically, logistic regression estimates a
multiple linear regression function defined as:
log(
P
i
1 − P
i
) = α
1
x
1
+ α
2
x
2
+ α
3
x
3
(4)
where
P
i
= P
r
(y = 1|x = x
i
) (5)
2.4 Linear Discriminant Analysis
(LDA)
The Linear Discriminant Analysis (LDA) aims to find
linear combinations of features that characterize or
separate two or more classes (Antuvan and Masia,
2019). In fact, it projects a dataset onto a lower-
dimensional sub-space with good class separability in
order to reduce computational costs and to avoid over-
fitting.
Hence the first step of the LDA algorithm is to cal-
culate the separability between different classes. This
latter is the distance between the mean of different
classes defined as:
S
b
=
g
∑
i=1
N
i
( ¯x
i
− ¯x
i
)( ¯x
i
− ¯x
i
)
T
(6)
Supervised Hardware/Software Partitioning Algorithms for FPGA-based Applications
861

where x is a sample (i.e., row) and g is the total num-
ber of samples within a given class.
After that, the distance between the mean and
sample of each class, also called the within class vari-
ance, is calculated as:
S
w
=
g
∑
i=1
(N
i
− 1)S
i
=
g
∑
i=1
N
i
∑
j=1
( ¯x
i, j
− ¯x
i
)( ¯x
i, j
− ¯x
i
)
T
(7)
Then the lower dimensional space P
LDA
is con-
structed so that the between class variance is maxi-
mized and the within class variance is minimized. Let
P be the lower dimensional space projection, the P
LDA
is determined as:
P
LDA
= argmax
P
P
T
S
b
P
P
T
S
w
P
(8)
2.5 Support Vector Machine (SVM)
For a number N of features, support vector machine
(SVM) algorithm aims to find a hyperplane in an N-
dimensional space that distinctly classifies the data
(Gola et al., 2019). In fact, given a labeled training
data, SVM outputs an optimal hyperplane that cate-
gorizes new examples (Maxwell, 2015). In fact, it can
be summed up as an optimization problem depending
only on the multipliers α
i
:
max
α
L
D
(α) =
N
∑
i=1
α
i
−
1
2
N
∑
i=1
N
∑
i
0
=1
α
i
α
i
0
, y
i
y
i
0
,
h
x
i
, x
i
0
i
s.t α
i
≥ 0 ∀i
and
N
∑
i=1
α
i
y
i
= 0
(9)
x
i
and y
i
are respectively the input and output observa-
tions,
h
x
i
, x
i
0
i
is the inner product of the observations
i and i
0
, α
i
are the ponderation coefficients that define
the support points.
2.6 Deep Neural Network (DNN)
As indicated in the DNN architecture illustrated in
Figure 2 the DNN model consists of four layers, two
of which are hidden layers. In the input layer, three
variables are set as independent inputs, including the
execution time (TE), the energy (E), and the alloca-
tion (A), while the task type label is set as the output
(Hw/Sw decision). Hence, the values of the three-
neurons of the input layer are passed through two hid-
den layers that have multiple neurons with activation
function in all neurons. The final output layer, which
indicates of the task type, has one neuron.
In the proposed architecture, the Relu function is used
as the activation function in all layers except in the
last layer (output layer) where the Sigmoid function
is used in order to map the output to the [0, 1] (Nie
et al., 2019).
Firstly, the input data should be vectorized and fed
into the network. A series of matrix operations is op-
erated on the input data layer by layer through the
two hidden layers. Each input sample is multiplied by
weights and added to bias that are updated after every
epoch. Finally, the activation functions are applied to
the result (Agostinelli et al., 2014).
Figure 2: DNN Architecture.
3 RESULTS AND DISCUSSION
In this work, the point is to describe what qualities
in a partitioning task contributes to decide whether it
is hardware or software. In other words: If the task
is, for instance, of a certain execution time, energy
and allocations, there probability that a certain task is
a hardware. In order to quantify the probability of a
task regarding software or hardware, several classifi-
cation approaches were used. Performance results are
reported in terms of training and test accuracy as well
as minimum mean-square error (MMSE) defined as
(Wiem et al., 2018):
MMSE =
1
N
N
∑
i=1
( ¯y(k) − y(k)) (10)
The comparative results are shown in Tables 1 and 2.
The predicted classes were compared with the true
ones for the training set of 70% randomly chosen
data from the dataset. The remaining data constitute
the test set. The training is conducted through 100
epochs, where an epoch corresponds to a learning on
all the data. In this work, the number of epochs was
chosen to satisfy the trade-off between the estimation
accuracy and the training time. To test and evaluate
the network, the test set was used ( population of 30%
of the whole database).
In the classification process, we observed that al-
most all the learning models grouped tasks under cer-
tain characteristics. For example, tasks that possess
high execution time and high energy in one group
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
862
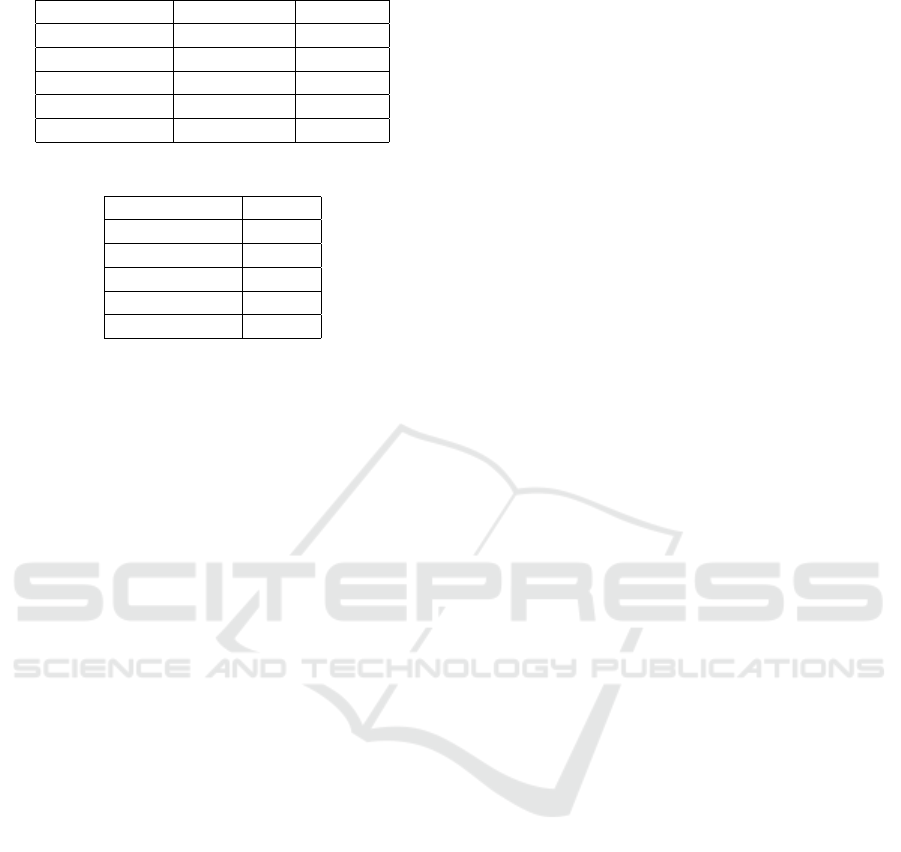
Table 1: Training/Test accuracies.
Classification Method Training accuracy Test accuracy
LR 0.53 0.52
BR 0.87 0.60
LDA 0.93 0.40
SVM 0.87 0.80
DNN 0.86 0.80
Table 2: Classification results in terms of MMSE.
Classification Method MMSE
LR 0.3404
BR 0.6324
LDA 0.7745
SVM 0.3638
DNN 0.4472
(hardware tasks). The observation on the classi-
fication results favors SVM learning algorithm for
classification problems since the correctness percent-
age is high compared to the competitive algorithms.
Though, the differences are not much.
The results reported in Tables 1 and 2, therefore,
prove the success of these approaches recognize task
type through the implicit relationships between input
and output variables. From these results, both DNN
and SVM are the most successful approaches to pre-
dict the task type with the highest accuracy and with-
out complex procedure.
4 CONCLUSION AND FUTURE
WORK
In this paper, we investigated the feasibility of su-
pervised learning algorithms for hardware/software
partitioning. Experiments were conducted using a
database that were collected from real tasks within
Altran technologies.
In fact, In general, this paper talks about classifi-
cation of functions in terms of their implementation
through hardware or software to raise the efficiency
of the system in terms of time and energy consump-
tion for FPGA-based Applications. Basically, it in-
troduces hardware/software partitioning algorithms in
order to solve the classification task in real-time sys-
tems. Such a system consists of 6 parts. First , the
database where we contain several tasks with 3 pa-
rameters, Energy, Allocations, Execution time and all
together with their types. Second, Linear Regression
model as the task type is represented linearly with the
three database parameters each multiplied by coeffi-
cient. This model aims to minimize the cost by find-
ing the best proper coefficient value for each parame-
ter. Third, Logistic Regression, where it differs from
the linear regression model as the calculation of the
weight based on the probability that falls into one of
two categories. Mainly, it is the statistical technique
that used to predict the relationship between inputs.
Fourth, Linear Discriminant Analysis (LDA), where it
aims to characterize or separate different classes that
share linear features in order to optimize the compu-
tations. Fifth, Support Vector Machine (SVM), as it
used to classify the data by finding a hyperplane in an
N-dimensional space where N is the number of fea-
tures. Finally, the last part of this paper is Deep Neu-
ral Network (DNN). DNN consists of 4 layers where
2 are hidden. The inputs of the trained DNN are the
three database parameters and the output is the item
type. Each layer have number of neurons with acti-
vation function. After applying these algorithms on
real experimentations on FPGA and CPU, we found
that they are efficient especially DNN and SVN algo-
rithms where they were more accurate in classifying
task type.
Hence, we prove the applicability of these meth-
ods and the high accuracy of the task type decision.
The tested models were trained offline based on
the collected data from real experimentations on
FPGA and CPU. The evaluation results show the ef-
fectiveness of AI in solving the partitioning prob-
lem. For real-time applications, it is important for the
tested methods to have a good generalization ability
so that they can still work effectively when the con-
ditions of online deployment could not be satisfied in
the training stage (Mohammad and Hannachi, 2019) ,
(Mohamed, 2019). Hence, motivated by the promis-
ing results, future work may address the unsupervised
learning for a hardware/software partitioning in order
to achieve a fully autonomous real-time system.
REFERENCES
Agostinelli, F., Hoffman, M., Sadowski, P., and Baldi, P.
(2014). Learning activation functions to improve deep
neural networks. arXiv preprint arXiv:1412.6830.
Alawieh, M., Kasparek, M., Franke, N., and Hupfer, J.
(2015). A high performance fpga-gpu-cpu platform
for a real-time locating system. In 2015 23rd Eu-
ropean Signal Processing Conference (EUSIPCO),
pages 1576–1580. IEEE.
Antuvan, C. W. and Masia, L. (2019). An lda-based
approach for real-time simultaneous classification of
movements using surface electromyography. IEEE
Transactions on Neural Systems and Rehabilitation
Engineering, 27(3):552–561.
Gola, J., Webel, J., Britz, D., Guitar, A., Staudt, T., Winter,
M., and M
¨
ucklich, F. (2019). Objective microstructure
classification by support vector machine (svm) using
Supervised Hardware/Software Partitioning Algorithms for FPGA-based Applications
863

a combination of morphological parameters and tex-
tural features for low carbon steels. Computational
Materials Science, 160:186–196.
Hoozemans, J., van Straten, J., Viitanen, T., Tervo, A.,
Kadlec, J., and Al-Ars, Z. (2019). Almarvi execution
platform: Heterogeneous video processing soc plat-
form on fpga. Journal of signal processing systems,
91(1):61–73.
Maxwell, R. (2015). The Routledge companion to labor and
media. Routledge.
Mohamed, K. (2019). Model order reduction method
for large-scale rc interconnect and implementation
of adaptive digital pi controller. IEEE Transac-
tions on Very Large Scale Integration (VLSI) Systems,
27(10):2447–2458.
Mohamed, K., Mehdi, A., and Abdelkader, M. (2018).
Lyapunov-global-lanczos algorithm for model order
reduction & adaptive pi controller of large scale elec-
trical systems. Scientia Iranica, 25(3):1616–1628.
Mohammad, N. and Hannachi, M. (2019). Optimized place-
ment approach on reconfigurable fpga. In Interna-
tional Journal of Modeling and Optimization 9.
Nie, X., Cao, J., and Fei, S. (2019). Multistability and
instability of competitive neural networks with non-
monotonic piecewise linear activation functions. Non-
linear Analysis: Real World Applications, 45:799–
821.
Rethinagiri, S. K., Palomar, O., Moreno, J. A., Unsal, O.,
and Cristal, A. (2015). Trigeneous platforms for en-
ergy efficient computing of hpc applications. In 2015
IEEE 22nd International Conference on High Perfor-
mance Computing (HiPC), pages 264–274. IEEE.
Ruder, S. (2016). An overview of gradient de-
scent optimization algorithms. arXiv preprint
arXiv:1609.04747.
Wiem, B., Mowlaee, P., Aicha, B., et al. (2018). Unsuper-
vised single channel speech separation based on opti-
mized subspace separation. Speech Communication,
96:93–101.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
864
