
papagenoX: Generation of Electronics and Logic for Embedded Systems
from Application Software
Tobias Scheipel
a
and Marcel Baunach
b
Institute of Technical Informatics, Graz University of Technology, Graz, Austria
Keywords:
Embedded Systems, Printed Circuit Board, Design Automation, Hardware/Software Co-design, Systems
Engineering, Reconfigurable Logic.
Abstract:
Embedded systems development usually starts with hardware engineering based on specific requirements
of the systems. These requirements are mainly derived from the needs of the not yet developed software
to be executed on the system. This process is predictive and many iterations are thus needed, as new
requirements often arise during the software development period. In the future, the market will demand
more and more sophisticated embedded systems with a much reduced time to market. It will thus be
inevitable that system prototypes and series products will need to be created as fast as possible. To
enable this, we propose a top-down approach termed papagenoX, dealing with the question of “How to
generate all layers X of the embedded systems stack including hardware and reconfigurable logic units
from application software?”. The present work is a work in progress and deals with the definition of
the research questions and several ideas and concepts of how to fundamentally solve them. Hence, it aims
at introducing ideas to create a generator for embedded systems electronics, reconfigurable logic and software.
1 INTRODUCTION
There is currently a common trend in embedded sys-
tems software engineering: code generation. Exam-
ples of this include code generation for Application
Software (ASW) and Basic Software (BSW) from
MATLAB models within automotive Electronic Con-
trol Units (ECUs) (AUTOSAR, 2017), and even Real-
Time Operating Systems (RTOSs) can be ported auto-
matically to other platforms by generating code from
formal models (Gomes and Baunach, 2019). In this
work, we propose a concept going a step further and
generating an entire embedded system with its hard-
ware from software, as illustrated in Fig. 1. Hence,
we formulate the overall research question as “How
can we enable automatic embedded systems genera-
tion from Application Software?”. Hardware in this
case subsumes not only reconfigurable logic in Field
Programmable Gate Arrays (FPGAs), but also elec-
tronics on Printed Circuit Boards (PCBs).
Our newly introduced process, which is primarily
designed for prototyping, will also help to evaluate
the intended ASW changes after deployment to
a
https://orcid.org/0000-0003-0691-6119
b
https://orcid.org/0000-0002-3716-2682
ASW
(impl.)
(A.)
ASW (exec.)
(D.)
PCB
(C.)
FPGA
(B.)
BSW
Figure 1: papagenoX divided into the main parts, shown in
the stack of an embedded system (impl./exec. = implemen-
tation and executable of the ASW).
quantify the consequences on the lower layers and
thus assess their feasibility and cost. This is espe-
cially important to find out if hardware changes in
the system are necessary or if the existing system
is still sufficient to execute the ASW. In addition,
the process is generally designed to drive the use of
reconfigurable logic by seamlessly integrating it into
the development and maintenance process.
136
Scheipel, T. and Baunach, M.
papagenoX: Generation of Electronics and Logic for Embedded Systems from Application Software.
DOI: 10.5220/0009159701360141
In Proceedings of the 9th International Conference on Sensor Networks (SENSORNETS 2020), pages 136-141
ISBN: 978-989-758-403-9; ISSN: 2184-4380
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

The present paper presents the work in progress and is
organized as follows: Section 2 motivates the topic of
embedded systems generation from application soft-
ware. In Section 3, the main idea and the scientific
approach for papagenoX is outlined. In Section 4 all
the envisioned parts of the concept are discussed in
detail and the overall concept is sketched with an ex-
emplary use case in Section 5. The paper concludes
with Section 6, in which the current state, the progress
made and the future work are explained.
2 MOTIVATION
The common process in embedded systems engi-
neering today usually starts with designing the hard-
ware according to requirements defined in natural lan-
guage. Subsequently, based on educated guesses or
best practices, a prototype is assembled, simulated
and tested. After this step, software development on
the prototype can start. As during software devel-
opment, new requirements can arise, this process is
prone to require multiple iterative redesign cycles in
order to result in a suitable hardware solution. In this
context, software development is much more dynamic
and flexible than the new development of hardware
prototypes. As a result, the prototypes are used for
as long as possible in order to avoid the time and ef-
fort involved in hardware redesign. In some cases,
however, the redesign becomes inevitable, resulting in
many different prototype variants with diverse prop-
erties. AS a result the state of the art is what we
call software development following hardware design
(“software follows or adjusts to hardware”).
With our contribution, we intend to invert the pro-
cess of embedded systems design towards “hardware
follows software”, introduced in detail in the follow-
ing Section 3.
3 SCIENTIFIC APPROACH
WITHIN papagenoX
In order to tackle the problems that arise as described
above, we intend to derive the requirements of a
system under development directly from previously
implemented application code in order to automati-
cally generate suitable and optimized lower layers.
As application code does not explicitly specify dis-
crete components but only functional requirements
(FRs), the analysis shall also consider additional non-
functional requirement (NFR) (e.g., communication
load, data retention time).
We have given our concept the name papagenoX,
an abbreviation for Prototyping APplication-based
with Automatic GENeration Of X, where X is for the
name of the corresponding layer (cf. Fig. 1).
The following structure is proposed to achieve the
envisioned goal: The process starts with ASW de-
velopment (implementation), followed by a thorough
analysis of all its FRs and NFRs. Based on this anal-
ysis, and a library of available hardware and soft-
ware modules, a configuration or selection space can
be opened over all these components, modules, and
possible interconnections. As this selection space can
still contain system configurations not suitable for the
objective (e.g., due to the unavailability of compo-
nents), further filtering towards special design deci-
sions must be applied. This yields several potential
configurations composed from different components
that can be optimized again in order to achieve the
best system that is suitable for all requirements. Of
course, optimization and selection metrics are also
based on FRs and NFRs (e.g., cost, size, energy
consumption, Electromagnetic Compatibility (EMC)
characteristics). This process is applied to all three
layers depicted in Fig. 1 in different extent and is ex-
plained in the following sections.
In this work, we additionally envision the use of
FPGAs or System on Programmable Chips (SoPCs)
to build hardware acceleration units by synthesizing
complex algorithms in logic (proper interfacing
included) to add further adaptability.
The fundamental paradigm shift towards “hard-
ware follows software” is mandatory to enable the ut-
most flexibility when designing future embedded sys-
tems. Since we understand established development
methods as being there for a reason, we will also re-
search methods to quantify the suitability of previ-
ously generated hardware configurations after soft-
ware changes, including possible necessary system
modification proposals.
4 ENVISIONED PARTS OF
papagenoX
The toolchain of the papagenoX concept will con-
tain a number of powerful features that facilitate au-
tomatic systems generation. This set of tools can be
divided into four main parts, being (A.) ASW analy-
sis, (B.) BSW generation, (C.) FPGA generation, and
(D.) PCB generation. All those parts are depicted in
Fig. 1 and are discussed in detail below. This work
presents solely the ideas of from a work in progress
concept and only few new findings at this stage.
papagenoX: Generation of Electronics and Logic for Embedded Systems from Application Software
137

4.1 ASW Analysis
Starting from the analysis of applications, the re-
search question to deal with is “Which information
needs to be included in ASW including NFRs to allow
the creation a embedded system?”. This means that
the requirements of the software to the system must be
extracted and forwarded to the next parts. Since the
ASW to be analyzed does not have to be a stand-alone
executable, the executable part must also be extracted
(cf. dotted arrows in Fig. 1).
The requirements analysis derives a selection
space by using constraint solving and design
space exploration strategies (Saxena and Karsai,
2011)(Nethercote et al., 2007) and logical expression
matching. This selection space contains multiple pos-
sible overall structures of the entire embedded sys-
tem:
• suitable computing platform module(s) and
• other hardware components/modules alongside
their interconnections
• BSW modules and drivers for hardware modules
Furthermore, this step also performs a pre-selection
of algorithms within the code, which are best suited
for mapping to reconfigurable logic (FPGAs) in part
(C.).
The results of the requirements analysis is for-
warded to the following parts.
4.2 BSW Generation
The next part deals with BSW generation and the
question on “How can we derive the needed BSW
features from ASW?”. To deal with this question,
we base our approach on our own RTOS, MCS-
martOS (Martins Gomes et al., 2017), as it can
be used with different computing platforms (e.g.,
MSP430 (Texas Instruments, ), RISC-V (Chen and
Patterson, 2016)). This operating system must in-
clude a generic driver management concept enriched
with non-functional properties to allow modular com-
position of hardware modules including resource
sharing mechanisms. Furthermore, such a manage-
ment concept enables optimization towards different
functional and non-functional requirements (e.g., se-
lectable resource management strategies or schedul-
ing algorithms). The output of this part is a BSW tai-
lored to the ASW’s needs.
4.3 FPGA Generation
Parallel to the previous part, the FPGA genera-
tion starts based on the ASW analysis. Here, the
question “How can we extract application specific
logic and automatically map it to FPGAs?” is ad-
dressed. As software functions are commonly exe-
cuted on Microcontroller Units (MCUs), our contri-
bution aims at hosting application-specific logic com-
ponents on FPGA platforms, exemplarily depicted as
filled squares connected to a soft core MCU in the
FPGA module in Fig. 2.
The ASW analysis must discover mapping can-
didate software functions (via, e.g., heuristics) in or-
der to enable this functionality within our generator.
Research is on deciding which functions should be
transferred from software to hardware and how to
generate or interface them with respect to FRs and
NFRs of the ASW (e.g., by transforming a function
call to on-chip I/O operations). We will also inves-
tigate suitable ASW design patterns and program-
ming paradigms to facilitate this process. There-
fore, the entire concept is supported by research on
the creation of a flexible soft-core MCU architecture
for hosting application-specific logic (based on e.g.,
mosartMCU (Mauroner and Baunach, 2018), RISC-
V (Waterman et al., 2016)). The goal is to work on
consistent development processes, where all system
functions and algorithms are still developed in soft-
ware, but then automatically mapped to on-chip ex-
tensions during compilation and synthesis and inter-
faced accordingly. We are also working on partial
reconfiguration support at runtime to achieve more
hardware flexibility and simplified adaptation. In the
expectation of more dynamic software updates, we
must also consider modifications to the soft-core ar-
chitecture. This is also important because modifiable
hardware will be available in the future, but there is
hardly any runtime support for it.
MCU
FPGA
soft
core
PCB
I/O
I/O
Figure 2: Hosting application-specific logic within an em-
bedded system.
4.4 PCB Generation
The part dealing with the lowest layer in the embed-
ded systems stack is sketched in this section. The
SENSORNETS 2020 - 9th International Conference on Sensor Networks
138

attempt is made to answer the questions “What in-
formation is needed to automatically generate PCBs
from ASW?” and “How can this information be used
to generate a PCB prototype matching all ASW re-
quirements?”. These questions can be answered in
two sub-parts by utilizing dedicated hardware mod-
ules as abstractions. The generated board is either a
motherboard, where these modules can be plugged in,
or a single PCB in which all the necessary electrical
components are integrated.
The first of the two sub-parts deals with the trans-
lation of constraints to a selection space of possible
system configurations. This is an abstract process and
does not deal with any electrical properties yet. To
do so, enriched module definitions must be created.
Our definitions are based on generic JSON (ECMA
International, 2017) descriptions including not only
their functional, but also their non-functional proper-
ties. This approach allows for possible systems con-
figurations to be established and a set of suitable con-
figurations can be filtered out by the toolchain. The
result is an intermediate system definition. This is be-
cause the electrical feasibility of the connections be-
tween the modules has not yet been considered, and
no dedicated PCB has been generated yet.
In this second sub-part, the interconnection on
electrical level is being dealt with. As stated
in (Scheipel and Baunach, 2019), this sub-part uses an
interconnected intermediate system definition to con-
vert it into a PCB. Several different inputs are neces-
sary for this:
• hardware module definition files and their corre-
sponding design block schematics and board lay-
outs,
• all necessary interface definitions to adequatly in-
terconnect the previously defined hardware mod-
ules, and
• one dedicated system definition file which repre-
sents the overall structure of the embedded system
(cf. first sub-part).
With these input files, schematics and board plans
can be generated. In the first step, the output of our
approach is based on the EAGLE (Autodesk, Inc., )
XML format.
5 USE CASE EXAMPLE
An idea to create an embedded system shall be de-
rived from the need of observing or controlling some
specific (physical) process. In our case, it starts with
the need of “measuring distances for further process-
ing in a car”. This requirements definition in natural
language spans a selection space of a great number
of components and software possibilities for imple-
menting our system. As the engineer knows that there
is a need to “measure distance” (I.) and send the dis-
tance values to be “further processed in a car” (II.),
application software development for the use case can
start by using generic Application Programming In-
terfaces (APIs):
1: [...]
2: read_distance(&distance,
SensorType.Automotive);
3: send_data(&rec, &distance,
CommType.Automotive);
4: [...]
This piece of pseudo-code written by the engi-
neer to meet the requirements in language specifies
these requirements in more detail, narrowing down
the list of components to be considered. In line 2,
distance data is read from an automotive-grade sensor
(requirement I.; technology need not be specified in
detail). Subsequently, it is sent to the recipient rec
over some automotive in-car communication technol-
ogy (requirement II.; again, not specified in detail) in
line 3. These abstract requirements could also be lists
of requirements for further specification.
The next few lines try to give an impression on
how papagenoX tackles the automatic system gener-
ation. Part (A.) has already started with the use of
certain APIs and is carried out first (cf. Fig. 1). It se-
lects a suitable BSW with drivers and services for part
(B.), and selects hardware components for part (D.).
In the analysis part (A.), the requirements are
examined more closely in order to obtain a better
overview of the actual needs of the ASW. The analysis
goes hand in hand with the other parts of the concept.
Subsequently in (B.), the BSW containing an Op-
erating System (OS) is assembled, including all APIs
and necessary drivers to use the hardware components
selected in part (D.). A tailored version of MCS-
martOS with a generic driver platform is utilized for
this reason. The set of features to enable this func-
tionality is currently under development.
In part (D.), from the set of all possible hard-
ware components and modules several possible sys-
tem configurations can arise. To simplify the explana-
tion of our use case, the PCB generation part then se-
lects a system containing: a ultra-sonic sensor of type
HC-SR04 (Cytron Technologies, 2013) for require-
ment (I.), and a CAN (International Organization for
Standardization, 2015) transceiver with a controller
for requirement (II)., both connected to a MSP430
LaunchPad™ (Texas Instruments, 2017) as a comput-
ing platform.
Finally, the requirement “measuring distances for
papagenoX: Generation of Electronics and Logic for Embedded Systems from Application Software
139
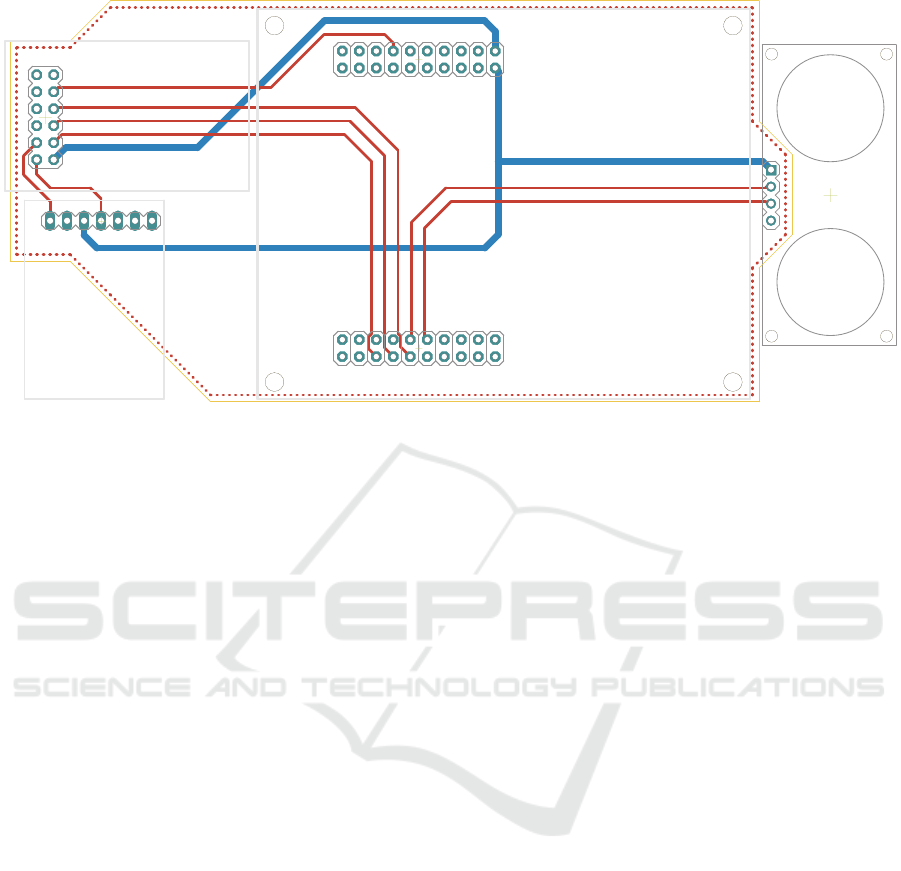
1
12
1
7
MSP430 LaunchPad
CAN Transceiver
CAN Controller
ULTRASONIC-HC-SR04
Figure 3: The generated PCB with module placeholders of the explained use case for measuring distances in a car.
further processing in a car” and two lines of code cre-
ate the embedded system depicted in Fig. 3.
6 CONCLUSION AND FUTURE
WORK
In the course of this work we presented a novel ap-
proach on how to generate an entire embedded system
when only having application code at hand. All the
ideas presented are from our current work in progress.
As our approach aims at inverting the state-of-the-art
process of embedded systems design from “software
follows hardware” to “hardware follows software”,
this opens up new questions in the context of soft-
ware analysis, and hardware, logic and software gen-
eration.
Since this is a work in progress, not all of its
parts have yet been implemented. To date, hardware
generation on PCB-level is already implemented and
partially published, but there is room for improve-
ment throughout the concept. Future steps include
the improvement of constraint matching mechanisms
for hardware module selection, the improvement of
the requirements analysis and the entirety of the re-
configurable logic generation part. Also, the BSW
layer must be constantly improved in order to meet
the future demands on the concept. As papagenoX is
generic and module based, it can be easily adopted to
different domains in the future. Lowering of the mod-
ule granularity to, e.g., electrical components level
(resistors, capacitors, integrated circuits, and so on)
is possible. The next steps in this work are to finish
the PCB generation alongside the ASW analysis for
FRs and NFRs.
REFERENCES
Autodesk, Inc. EAGLE. [retrieved: Nov, 2019].
AUTOSAR (2017). Classic platform release 4.3.1.
Chen, T. and Patterson, D. A. (2016). RISC-V Geneology.
Technical Report UCB/EECS-2016-6, EECS Depart-
ment, University of California, Berkeley.
Cytron Technologies (2013). HC-SR04 User’s Manual.
ECMA International (2017). ECMA-404: The JSON Data
Interchange Syntax, 2 edition.
Gomes, R. M. and Baunach, M. (2019). Code generation
from formal models for automatic rtos portability. In
2019 IEEE/ACM International Symposium on Code
Generation and Optimization (CGO), pages 271–272.
International Organization for Standardization (2015). ISO
11898: Road vehicles – Controller area network
(CAN) , 2 edition.
Martins Gomes, R., Baunach, M., Malenko, M.,
Batista Ribeiro, L., and Mauroner, F. (2017). A Co-
Designed RTOS and MCU Concept for Dynamically
Composed Embedded Systems. In Proc. of the 13th
Workshop on Operating Systems Platforms for Em-
bedded Real-Time Applications, pages 41–46.
Mauroner, F. and Baunach, M. (2018). mosartMCU: Multi-
Core Operating-System-Aware Real-Time Microcon-
troller. In Proc. of the 7th Mediterranean Conference
on Embedded Computing, pages 1–4.
Nethercote, N., Stuckey, P. J., Becket, R., Brand, S., Duck,
G. J., and Tack, G. (2007). MiniZinc: Towards a Stan-
dard CP Modelling Language. In Bessi
`
ere, C., edi-
tor, Principles and Practice of Constraint Program-
SENSORNETS 2020 - 9th International Conference on Sensor Networks
140

ming – CP 2007, pages 529–543, Berlin, Heidelberg.
Springer Berlin Heidelberg.
Saxena, T. and Karsai, G. (2011). A meta-framework for
design space exploration. In 2011 18th IEEE Interna-
tional Conference and Workshops on Engineering of
Computer-Based Systems, pages 71–80.
Scheipel, T. and Baunach, M. (2019). papagenoPCB:
An Automated Printed Circuit Board Generation Ap-
proach for Embedded Systems Prototyping. In ICONS
2019 - The Fourteenth International Conference on
Systems, pages 20–25.
Texas Instruments. MSP430 ultra-low-power sensing and
measurement MCUs.
Texas Instruments (2017). MSP430F5529 LaunchPad™
Development Kit (MSP--EXP430F5529LP).
Waterman, A., Lee, Y., Patterson, D. A., and Asanovic, K.
(2016). The RISC-V Instruction Set Manual, Vol-
ume I: User-Level ISA, Version 2.1. Technical Report
UCB/EECS-2016-118, EECS Department, University
of California, Berkeley.
papagenoX: Generation of Electronics and Logic for Embedded Systems from Application Software
141
