
Tracking Handball Players with the DeepSORT Algorithm
Kristina Host
a
, Marina Ivašić-Kos
b
and Miran Pobar
c
Department of Informatics, University of Rijeka, Rijeka, Croatia
Keywords: Object Detection, YOLO, Sport, Handball, Tracking, DeepSORT.
Abstract: In team sports scenes, such as in handball, it is common to have many players on the field performing different
actions according to the rules of the game. During practice, each player has their own ball, and sequentially
repeats a particular technique in order to adopt it and use it. In this paper, the focus is to detect and track all
players on the handball court, so that the performance of a particular athlete, and the adoption of a particular
technique can be analyzed. This is a very demanding task of multiple object tracking because players move
fast, often change direction, and are often occluded or out of the camera field view. We propose a DeepSort
algorithm for player tracking after the players have been detected with YOLOv3 object detector. The
effectiveness of the proposed methods is evaluated on a custom set of handball scenes using standard multiple
object tracking metrics. Also, common detection problems that have been observed are discussed.
1 INTRODUCTION
Handball, along with football and basketball, is one
of the most represented team sports in Europe. For
that reason, it would be useful to develop a system
that performs a complete analysis of players’
movements and actions. The performance of players
can be greatly enhanced by tracking their movements.
Therefore, object detection and tracking in a sports
environment are rapidly gaining importance.
Just by looking at an image or a video, humans
can instinctively detect and track an object in it and
differentiate between them. Computers, on the other
hand, need human guidance in order to learn to do so
themselves. For that reason, numerous algorithms for
detection and tracking objects have been created.
For the analysis of player activities, a player must
be located concerning its environment and other
players, as well as tracked in time. For detecting the
players, an object detection algorithm such as YOLO
(Redmon & Farhadi, 2018) can be used on each
frame. After having been detected, a player can be
tracked and labeled with a corresponding ID.
Many approaches for object tracking have been
proposed, but lately, due to advances in object
detection, tracking-by-detection has become more
prevalent (Ciaparrone et al., 2019). One of such
a
https://orcid.org/0000-0002-1829-8023
b
https://orcid.org/0000-0002-1940-5089
c
https://orcid.org/0000-0001-5604-2128
algorithms, The Simple Online and Realtime
Tracking (SORT) was proposed by Bewley, Ge, Ott,
Ramos, & Upcroft (2016), which performed
favorably in comparison with other tracking
algorithms such as TDAM(Yang, & Jia, 2016),
MDP(Xiang, Alahi & Savarese, 2015), SMOT (Dicle,
Camps & Sznaier, 2013). An extension of that
algorithm, SORT with deep association metric (Deep
SORT) was proposed in (Wojke, Bewley & Paulus,
2017) and tuned for pedestrian detection. In Burić,
Ivašić-Kos & Pobar (2019), a preliminary qualitative
evaluation of these algorithms on the sports domain
was considered. The DeepSORT achieved the most
stable tracking results, so it is tested here using
different metrics on the task of tracking handball
players.
The paper is organized as follows: in the next
section, the tracking of players is elaborated, and the
Deep SORT algorithm is described. In Section 3, the
experimental setup and the prepared dataset are
presented. The results of the experiment and the
discussion of different problems that were noticed are
given in Section 4, followed by the conclusion and
future research directions in Section 5.
Host, K., Ivaši
´
c-Kos, M. and Pobar, M.
Tracking Handball Players with the DeepSORT Algorithm.
DOI: 10.5220/0009177605930599
In Proceedings of the 9th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2020), pages 593-599
ISBN: 978-989-758-397-1; ISSN: 2184-4313
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
593

2 TRACKING PLAYERS
Handball is played by two teams of seven players,
using hands to pass the ball to each other in order to
score a goal. This causes multiple players to be
involved in the scene at the same time, which makes
it difficult to detect and track them the whole time.
In the handball footages, depending on whether it
is a match or a practice, approximately 14 to 25
players need to be tracked. For that reason, an
algorithm for multiple object tracking (MOT) must be
used (Burić et al. 2019).
In the Deep SORT algorithm, which is used here,
the detections
obtained with an object detector, are
used to steer the tracking process. The goal of the
tracker itself is then to associate the obtained
bounding boxes in different frames together so that
the same unique ID is assigned to those boxes that
contain the same target. To this end, the tracker may
use the information it can obtain from the detected
bounding boxes, e.g. the locations of box centroid,
their dimensions, the relative position from the boxes
in previous frames, or some visual features extracted
from the image.
2.1 Detection Algorithm - YOLOv3
In order to track an object, it must first be detected.
When it comes to object detection, there are many
algorithms such as Mask R CNN (He, Gkioxari,
Dollár & Girshick, 2017), Faster R CNN (Girshick,
2015), SSD (Liu et al. 2016), YOLO (Redmon,
Divvala, Girshick, & Farhadi, 2016), etc. Following
the results of (Burić, Pobar & Ivašić-Kos 2019), in the
course of which various algorithms were tested,
YOLOv3 (Redmon & Farhadi, 2018) was chosen
because it gave the best results for detecting persons.
Yolo is an algorithm based on a single
Convolutional neural network (CNN) and can detect
objects in real-time. It predicts bounding boxes and
confidence values for grid cells into which an image
or frame is divided. In the cases when an object is
spread across more than one grid cell, the holder of
its prediction will be the center cell.
In this particular research, it was important to
track the handball players. In consequence of that, for
the detection of those players (Burić, Pobar & Ivašić-
Kos 2018), the bounding boxes for the objects
corresponding to the class “person” were taken into
consideration, but only if the confidence for that class
was higher than 70%.
2.2 Tracking Algorithm - DeepSORT
DeepSORT (Wojke et al., 2017) is a tracking-by-
detection algorithm that considers both the bounding
box parameters of the detection results, and the
information about appearance of the tracked objects
to associate the detections in a new frame with
previously tracked objects. It is an online tracking
algorithm. Therefore it only considers information
about the current and previous frames to make
predictions about the current frame without the need
to process the whole video at once.
At the beginning of the footage, i.e., in the first
frame, a unique track ID is assigned to each bounding
box that represents a player and has a confidence
value higher than a set threshold. The Hungarian
algorithm is used to assign the detections in a new
frame to existing tracks so that the assignment cost
function reaches the global minimum.
The cost function involves the spatial
(Mahalanobis) distance 𝑑
of the detected bounding
box from the position predicted according to
previously known position of that object, and a visual
distance 𝑑
that considers the appearance of the
detected object and the history of appearance of the
tracked object. The cost function of assigning a
detected object 𝑗 to a track 𝑖 is given by the
expression:
𝑐
,
=𝜆𝑑
𝑖,
𝑗
+
1−𝜆
𝑑
𝑖,
𝑗
(1)
where λ is a parameter that can be set to determine the
influence of the spatial distance 𝑑
and the visual
distance 𝑑
.
The spatial distance 𝑑
is given by the
expression:
𝑑
𝑖,
𝑗
=𝑑
−𝑦
𝑆
𝑑
−𝑦
(2)
where 𝑦
and 𝑆
represent the mean and the
covariance matrix bounding box observations for the
i-th track, and 𝑑
represents the j-th detected
bounding box.
The visual distance 𝑑
relies on appearance
feature descriptors and is given by the expression:
𝑑
𝑖,
𝑗
=min1−𝑟
𝑟
|𝑟
∈ℛ
, (3)
where 𝑟
is the appearance descriptor extracted from
the part of the image within the j-th detected bounding
box, and ℛ
is the set of last 100 appearance
descriptors 𝑟
associated with the track i.
The 𝑑
measure uses the cosine distance
between the j-th detection and i-th track to select the
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
594

track where visually the most similar detection was
previously found to the current detection.
The appearance descriptors are extracted using a
wide residual neural network comprising two
convolutional layers followed by six residual blocks
that output a 128-element vector. The network was
pre-trained on a person re-identification dataset of
more than a million images of 1261 pedestrians
(Wojke et al., 2017). The feature vectors are
normalized to fit within a unit hypersphere so that the
cosine distance can be used.
New track IDs are generated whenever there are
more detections in a frame than already tracked
players, i.e., when a new player is detected in a frame.
A new track is also created when a detection cannot
be assigned to any track, because the detection is too
far from any track, or not visually similar to any
previous detection. This is controlled by thresholds
that set the maximum 𝑑
and 𝑑
when an
assignment is still possible. A track may be
abandoned if no assignment has been made to it for n
consecutive frames. In that case, a new track ID will
be assigned if the same object re-appears later in the
video.
The appearance information is used in particular
to assist in re-identification and prevent new IDs
generation for objects that have not been tracked for
some time, either because they were under occlusion,
have temporarily left the scene, or were not detected
because of detector error.
3 EXPERIMENT
The goal of the experiment is to test the performance
of the Deep SORT tracker on the handball player
tracking task.
In order to evaluate the tracking results, a dataset
from the handball domain, containing ground truth
tracking annotations had to be prepared first, which is
described below in more detail.
The tracking results were then evaluated using
multiple common object tracking performance
measures. No single performance measure exists that
can uniquely describe the complex behavior of
trackers, so different measures have been designed
for specific applications in mind. Here, the number of
identity switches (ID) (Milan et al., 2016),
identification precision (IDP), identification recall
(IDR) and the identification F1 (IDF1) measures
(Ristani et al., 2016) are used.
An identity switch happens if a ground truth target
is matched to a track 𝑗 and the last known assignment
was to a track 𝑘≠𝑗.
In contrast, the set of IDP, IDR, and IDF1
measures focus on how long a target is correctly
identified, regardless of the number of mismatches.
Identification precision (IDP) is the fraction of
computed detections that are correctly identified in all
frames, while identification recall (IDR) is the
fraction of ground truth detections that are correctly
identified. The IDF1 measure is the ratio of correctly
identified detections over the average number of
ground-truth and computed detections.
Both the number of identity switches and the
IDP/R/F1, measures can be useful for gaining insight
about the performance of the tracker in the handball
domain, however, being able to re-identify a player
after the tracker lost him for a while may be more
important than the number of mismatches. Other
commonly used measures, the multiple objects
tracking precision (MOTP), and the multiple objects
tracking accuracies (MOTA) (Bernardin &
Stiefelhagen, 2008) are also reported here, but since
they heavily award detection performance, they are
less relevant here since the same detector was used to
generate the ground truth detections and the
detections for the tracker.
3.1 Dataset
The dataset contains a subset of high-quality video
recordings of handball practice and matches recorded
indoors during a handball school (Ivasic-Kos &
Pobar, 2018). The recordings were made using a
stationary Nikon D7500 DSLR camera, with a Nikon
18-200mm VR lens, in full HD resolution
(1920x1080) at 60 frames per second. The camera
was positioned on the border of the playing field, on
a tripod at 1.5m height. From the spectators’ point of
view, the height of the camera, which was 10m away
from the border, was at 3.5m.
The participants were young handball players and
their coaches.
To obtain the ground truth annotation data, the
videos were first automatically processed using the
YOLOv3 object detector and the DeepSORT tracker
to bootstrap the annotation process, and then
manually corrected. Since the object detection
already performed satisfactory (Pobar & Ivašić-Kos,
2019), the focus of the work was to evaluate the
tracking performance, i.e. the ability of the tracker to
assign the correct IDs to detections, and not the object
detection performance. For this reason, object
detection errors such as a missed detection of a player
in a frame were not corrected in the ground truth files,
but only incorrect assignments of detections to tracks.
Tracking Handball Players with the DeepSORT Algorithm
595
To facilitate manual correction and annotation, a
custom tool was made using Python and OpenCV.
The tool allows easy swapping of IDs of two
tracks, which is a common tracker error when a player
moves in front of the other. For example, to correct
the error of swapping players, the first player is
selected with the left mouse click, and the second one
with the right and their IDs would be swapped from
that frame forward. An incorrect ID, which often
happens in case of occlusion, or when previously
tracked players re-enter the frame, can also be edited
by right-clicking the bounding box which ID needs
changing. Since a single incorrect ID in a frame
usually corresponds to a wrongly created new track,
it would repeat in the next frames, so correcting a
tracking ID in a frame also changes the ID in the
following frames. Given that the IDs in a frame must
be unique, the program does not allow accidental
duplication of an already existing ID. Furthermore, if
the swapped IDs need to be changed, but the
bounding boxes for both players were not detected at
some time later, the user enters the desired value, and
the corrections of the IDs occur only until both of the
bounding boxes appear again.
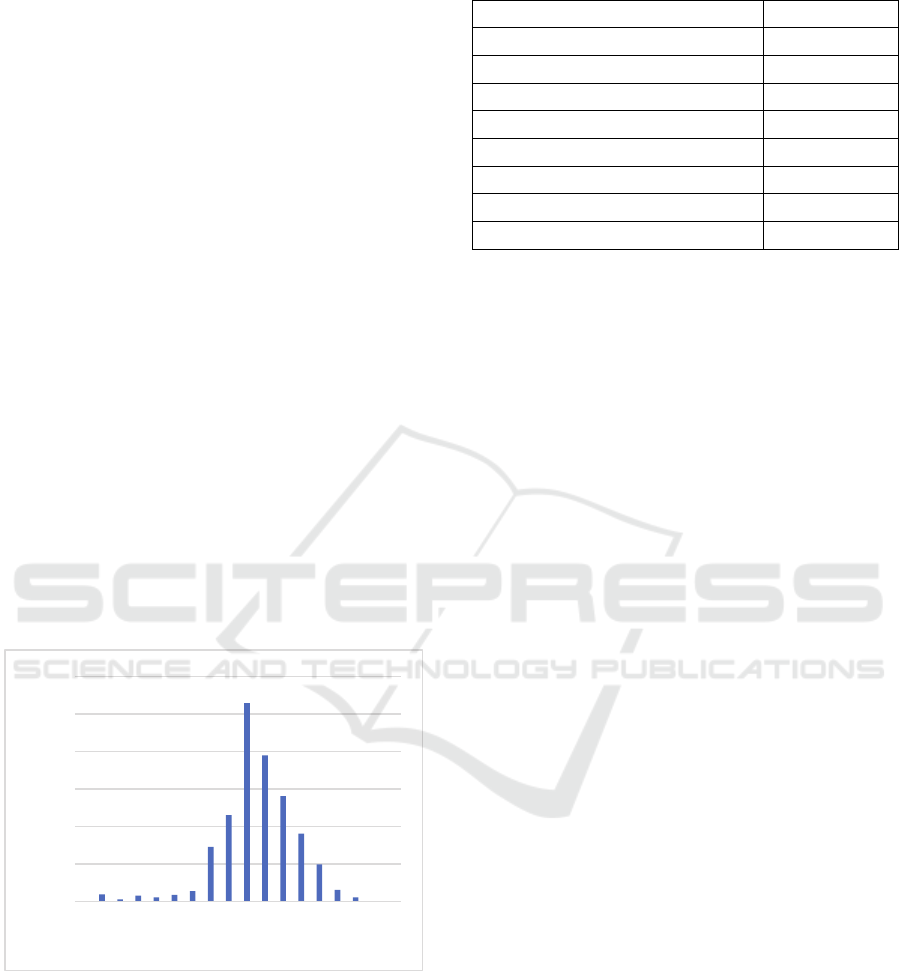
The total duration of the annotated dataset is 6min
and 18s. The Fig. 1 shows the distribution of the
number of detected players on each frame in the
tested videos. Most frames in the video contained 10-
11 players.
Figure 1: Histogram of the number of players per frame.
4 RESULTS AND DISCUSSION
The quantitative evaluation results are presented in
Table 1.
Table 1: Quantitative evaluation results.
Measure Value
#tracks in the ground truth 279
#tracks 1554
Identity switches 1483
IDF1 24.7%
IDP 24.7%
IDR 24.7%
MOTA 99.3%
MOTP 99%
The results show that for each player that should
be tracked, the identity switches caused the creation
of, on average, 5-6 additional tracks by the Deep
SORT algorithm, so there are 5 times more tracks
than in ground-truth data. Due to the relatively large
number of players in the video, frequently changed
positions, and occlusion, a large number of identity
switchers are present (1483). Also, the number of
players simultaneously present in the frame obviously
affects the tracking performance so that the players
can be correctly identified for 24,7% of the time,
according to the IDF1 measure. Player identifications
that are correctly identified in frames (IDP) are
balanced to identification recall (IDR).
Measures MOTA and MOTP show high accuracy
and precision results of 99% but are not relevant here
since the same detector was used to generate the
ground truth detections and the detections for the
tracker.
Tracking mistakes can be attributed to several
factors. As in all tracking-by-detection algorithms,
the accuracy of tracking is greatly influenced by the
accuracy of the object detector. If a player is
inaccurately detected, the tracking will be inaccurate
as well. For example, false positives of the detector,
i.e. the bounding boxes that are detected where there
are no objects to detect, can confuse the tracker to
assign an ID to that box that would otherwise have
been assigned to a correct detection.
In other cases, the false positive will produce
spurious object IDs with short track durations. In
Figure 2, the left shows an example of detecting a
player where there is not one, and assigning the ID
with the value 31 to it. Furthermore, when the players
are at a significant distance, the detector may not
recognize them, and in such cases they cannot be
tracked. In Figure 2, the middle shows an example of
a player not being detected due to the distance from
the camera. Another problem regarding the detector
is the occlusion, e.g. when a player is covered by
another player or by the goal frame.
0%
5%
10%
15%
20%
25%
30%
1 3 5 7 9 11 13 15 17
Percent of Frames
Number of Players
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
596

An example of that is shown in Figure 2, right,
where a player was not detected because she was
occluded by another player with the ID 5.
Figure 2: Example of false-positive detection (left), missed
detection (middle) and missed detection due to occlusion
(right).
Partial occlusion can also make re-identification
based on appearance more difficult as it can change
the seeming appearance of a player. In these cases,
the player will be recognized as a new player and
assigned a new ID, which means that the previous
data about tracking will not be accessible. Figure 3
shows one such example in three consecutive frames.
On the left, there are three players with the IDs 5,7,
and 15 in the frame, in the middle the player with the
ID 7 is occluded and not detected, and on the right the
tracker didn’t re-identify the player with the ID 7, but
it assigned to it a new ID with the value 22.
Figure 3: The problem of re-identification after occlusion.
The small scale of some objects in the distance
can also be a problem. Although the detector can
detect a player in the distance, a different ID may be
assigned by the tracker in subsequent frames due to
the similarity between the clothes of the player and
the background, which makes it difficult for the
tracker to recognize that the player is the same as in
the previous frames. Figure 4 shows an example of
that situation, where the distant player with ID 11 is
being detected and tracked, but when it comes to the
background with similar color, the tracker recognizes
it as a new player.
Figure 4: Identity switch due to small scale and similar
colors.
Players entering and exiting the frame pose
similar problems like occlusion. When a player has
left the frame at one moment and returns after some
time, the tracker often assigns him a new ID. In some
cases, this has been overcome thanks to the
information of appearance, but in others the issue is
still present. Moreover, when a player exits a frame,
and a different player enters, the previous player’s ID
is often assigned to the new player, when in fact a new
ID should be assigned. Another example is when one
player is leaving the frame, and the second one is
situated on the edge of the frame. In this case when
the first player leaves the second one takes its ID.
The IDs can also be swapped between two
similarly dressed players, between whom the tracker
does not differentiate, or when their movements
coincide.
Figure 5 shows two problems of ID swapping due
to exiting the frame and occlusions. The player with
ID 9 exits the frame (Fig. 5 left), while at the same
time the player with ID 3 occupies his position and
his ID value (Fig. 5 right). On the same frame, a third
player who was not previously detected on the left
frame due to occlusion, takes the ID of second player
(becames 3), which is probably due to the same color
of clothes and similar position on the frame. The
coach and the player with ID 10 are well detected on
both frames, although large occlusions exist. A player
with ID 5 (Fig. 5 left) has left the frame and his ID is
correctly excluded from the frame on the right (Fig. 5
right).
Tracking Handball Players with the DeepSORT Algorithm
597

Figure 5: Identity switches due to exiting the frame.
5 CONCLUSIONS
This paper deals with the tracking of young handball
players during handball practice. The goal was to
detect and track all players on the handball court so
that the performance of a particular athlete and the
adoption of a particular technique can be analyzed.
This is a very demanding task of multiple object
tracking since players move fast, often change
direction, and are very often occluded and out of the
camera field view. For detection of player the
YOLOv3 detector was used and DeepSORT
algorithm for player tracking. The results were
evaluated on custom dataset that contains handball
videos with marked player ID-s. The performances of
the algorithm were tested according to common
multiple object tracking measures: IDF1, IDP, IDR,
MOTA, MOTP. The results of MOTA and MOTP are
excellent but not relevant because the same detector
was used for ground truth detections and in tracking.
Due to the relatively large number of players on the
field that are often occluded, and the demanding
scenario, players were correctly identified 24.7% of
the time, according to the IDF1 measure.
A detailed analysis of the results showed that the
scale of an object, occlusion, swapping IDs, and the
similar color of the players’ clothes with the
background, many times appear as problems. Those
issues are challenging even for people familiar with
players and the rule of the game, so in the future, we
will consider different methods to focus monitoring
only on players who are active, perform a given
action, or are carriers of the game.
Also, we will consider defining an appropriate
multiplayer tracking metric that would appropriately
evaluate those elements of athlete tracking that are
relevant to the task of monitoring and analyzing
athlete activity, and performing a particular action.
ACKNOWLEDGMENTS
This research was fully supported by the Croatian
Science Foundation under the project IP-2016-06-
8345 “Automatic recognition of actions and activities
in multimedia content from the sports domain”
(RAASS) and by the University of Rijeka under the
project number uniri-drustv-18-222.
REFERENCES
Bernardin, K., & Stiefelhagen, R. (2008). Evaluating
multiple object tracking performance: the CLEAR
MOT metrics. Journal on Image and Video Processing,
2008, 1.
Bewley, A., Ge, Z., Ott, L., Ramos, F., & Upcroft, B. (2016,
September). Simple online and realtime tracking. In
2016 IEEE International Conference on Image
Processing (ICIP) (pp. 3464-3468). IEEE.
Burić, M., Ivašić-Kos, M. & Pobar, M. (2019) (in press)
Player Tracking in Sports Videos. In 19th IEEE
International Conference on Computer and
Information Technology (CIT 2019)
Burić, M., Pobar, M., & Ivašić-Kos, M. (2019, January).
Adapting YOLO network for ball and player detection.
In Proceedings of the 8th International Conference on
Pattern Recognition Applications and Methods
(ICPRAM 2019) (pp. 845-851).
Burić, M., Pobar, M., & Ivašić-Kos, M. (2018, January).
Ball detection using YOLO and Mask R-CNN. In 2018
International Conference on Computational Science
and Computational Intelligence (CSCI).
Ciaparrone, G., Sánchez, F. L., Tabik, S., Troiano, L.,
Tagliaferri, R., & Herrera, F. (2019). Deep Learning in
Video Multi-Object Tracking: A Survey. arXiv preprint
arXiv:1907.12740.
Dicle, C., Camps, O. I., & Sznaier, M. (2013). The way they
move: Tracking multiple targets with similar
appearance. In Proceedings of the IEEE international
conference on computer vision (pp. 2304-2311).
Girshick, R. (2015). Fast r-CNN. In Proceedings of the
IEEE international conference on computer vision (pp.
1440-1448).
He, K., Gkioxari, G., Dollár, P., & Girshick, R. (2017).
Mask r-CNN. In Proceedings of the IEEE international
conference on computer vision (pp. 2961-2969).
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C. Y., & Berg, A. C. (2016, October). SSD: Single
shot multibox detector. In European conference on
computer vision (pp. 21-37). Springer, Cham.
Ivasic-Kos, M., Pobar, M. (2018). “Building a labeled
dataset for recognition of handball actions using mask
R-CNN and STIPS,” in 7th IEEE European Workshop
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
598

on Visual Information Processing (EUVIP), Tampere,
Finland, pp. 1-6
Milan, A., Leal-Taixé, L., Reid, I., Roth, S., & Schindler,
K. (2016). MOT16: A benchmark for multi-object
tracking. arXiv preprint arXiv:1603.00831.
Pobar, M., & Ivašić-Kos, M. (2019, March). Detection of
the leading player in handball scenes using Mask R-
CNN and STIPS. In Eleventh International Conference
on Machine Vision (ICMV 2018) (Vol. 11041, p.
110411V). International Society for Optics and
Photonics.
Redmon, J., Divvala, S., Girshick, R., & Farhadi, A. (2016).
You only look once: Unified, real-time object detection.
In Proceedings of the IEEE conference on computer
vision and pattern recognition (pp. 779-788).
Redmon, J., & Farhadi, A. (2018). Yolov3: An incremental
improvement. arXiv preprint arXiv:1804.02767.
Ristani, E., Solera, F., Zou, R., Cucchiara, R., & Tomasi, C.
(2016, October). Performance measures and a data set
for multi-target, multi-camera tracking. In European
Conference on Computer Vision (pp. 17-35). Springer,
Cham.
Wojke, N., Bewley, A., & Paulus, D. (2017, September).
Simple online and realtime tracking with a deep
association metric. In 2017 IEEE International
Conference on Image Processing (ICIP) (pp. 3645-
3649). IEEE.
Xiang, Y., Alahi, A., & Savarese, S. (2015). Learning to
track: Online multi-object tracking by decision making.
In Proceedings of the IEEE international conference on
computer vision (pp. 4705-4713).
Yang, M., & Jia, Y. (2016). Temporal dynamic appearance
modeling for online multi-person tracking. Computer
Vision and Image Understanding, 153, 16-28.
Tracking Handball Players with the DeepSORT Algorithm
599
