
Reinforcement Learning Considering Worst Case and Equality within
Episodes
Toshihiro Matsui
Nagoya Institute of Technology, Gokiso-cho Showa-ku Nagoya 466-8555, Japan
Keywords:
Reinforcement Learning, Path-finding, Equality, Leximin.
Abstract:
Reinforcement learning has been studied as an unsupervised learning framework. The goal of standard rein-
forcement learning methods is to minimize the total cost or reward for the optimal policy. In several practical
situations, equalization of the cost or reward values within an episode may be required. This class of problems
can be considered multi-objective, where each part of an episode has individual costs or rewards that should
be separately considered. In a previous study this concept was applied to search algorithms for shortest path
problems. We investigate how a similar criterion considering the worst-case and equality of the objectives
can be applied to the Q-learning method. Our experimental results demonstrate the effect and influence of the
optimization with the criterion.
1 INTRODUCTION
Reinforcement learning has been studied as an un-
supervised learning framework (Sutton and Barto,
1998). The goal of standard reinforcement learning
methods is to minimize the total cost or reward for the
optimal policy. In several practical situations, equal-
ization of the cost or reward values within an episode
might be required. For example, in mobile robot
navigation or adaptive routing in communication net-
works, the equalization of lifetime or peak load of in-
dividual facilities in a paths might be required. This
class of problems can be considered multi-objective,
where each part of an episode has individual costs or
rewards that should be separately considered. Such
episodes relate to situations where a sequence of an
agent’s behavior should be determined so that its risk
or benefit is equalized in the sequence.
As a criterion for multiple objectives, we use lex-
imin, which is defined as a dictionary order on objec-
tive vectors sorted in ascending order. The maximiza-
tion problem with leximin improves the worst-case
cost and equality among objectives. Previvous studies
show that optimization with leximin can be decom-
posed in the manner of dynamic programming (Mat-
sui et al., 2014; Matsui et al., 2015).
This concept has been applied to search algo-
rithms based on dynamic programming for shortest
path problems with similar criterion (Matsui et al.,
2018). Since the problem resembles reinforcement
learning for minimization problems that optimize se-
quences from a start state to a goal state, a similar
technique can be applied to a part of the reinforce-
ment learning.
We investigate how a similar criterion consider-
ing the worst-case and equality of the objectives can
be applied to the Q-learning method. For this goal,
we extend the criterion to meet the weighted average
operation for different lengths of cost/reward vectors
corresponding to episodes, and consider the require-
ments and limitations of the extended Q-learning. Our
experimental results demonstrate the effect and influ-
ence of the optimization with our criterion.
The remainder of this paper is organized as fol-
lows. In the next section, we describe the prelim-
inary aspects of our study including standard rein-
forcement learning, a criterion that considers multi-
ple objectives and a shortest path problem with this
criterion. Then, we propose a reinforcement learning
method with a similar criterion in Section 3. The pro-
posed approach is experimentally evaluated and dis-
cussed in Sections 4 and 5. Finally, we conclude our
study in Section 6.
2 PRELIMINARY
Below, we describe several properties of reinforce-
ment learning, the leximin criterion for multi-
objective problems, and shortest path problems with
Matsui, T.
Reinforcement Learning Considering Worst Case and Equality within Episodes.
DOI: 10.5220/0009178603350342
In Proceedings of the 12th International Conference on Agents and Artificial Intelligence (ICAART 2020) - Volume 1, pages 335-342
ISBN: 978-989-758-395-7; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
335

a similar criterion quoting definitions and properties
from (Matsui et al., 2018).
2.1 Q Learning
Q-learning is a fundamental reinforcement learning
method that optimizes a policy to determine a se-
quence of states and actions in a state transition
model. It consists of set of states S, set of actions
A, observed reward/cost values for actions, evaluation
values Q(s, a) for each pair of state s ∈ S and action
a ∈ A, and parameters for learning. When action a is
performed in state s, it causes a state transition with
a corresponding reward/cost value based on an envi-
ronment whose optimal policy should be mapped to
Q-values. For the minimization problem, standard Q-
learning is represented as follows
Q(s, a) ← (1 − α)Q(s, a) + α(c + γ min
a
0
Q(s
0
, a
0
)) ,
(1)
where s and a are the current state and action, s
0
and
a
0
are the next state and action, and c is a cost value
for action a in state s. α and γ are the parameters
of the learning and discount rates. With action selec-
tions based on an exploration strategy, Q-values are
iteratively updated and propagated in the manner of
asynchronous dynamic programming.
Online search algorithms, including the Learning
Real-time A* algorithm (Barto et al., 1995), that per-
form asynchronous dynamic programming for short-
est path problems are a base of reinforcement learning
algorithms. The algorithms are also designed to per-
form exploration and exploitation to learn the optimal
shortest path on a graph. Here, an agent repeats tours
from a start vertex to a goal vertex of the graph with
learning and exploration rules.
2.2 Criteria Considering Worst-case
and Equality
Since we focus on a class of multi-objective optimiza-
tion problems, we describe several related concepts
below.
Definition 1 (Multi-objective optimization problem).
A multi-objective optimization problem is defined with
hX, D, Fi. X is a set of variables, D is a set of domains
of variables, and F is a set of objective functions.
Variable x
i
∈ X takes value from finite and discrete set
D
i
∈ D. For set of variables X
i
⊆ X, function f
i
∈ F
is defined as f
i
(x
i,1
, · ·· , x
i,k
) : D
i,1
× ··· × D
i,k
→ N,
where x
i,1
, · ·· , x
i,k
∈ X
i
. f
i
(x
i,1
, · ·· , x
i,k
) is simply de-
noted by f
i
(X
i
). The goal of the problem is to simulta-
neously optimize the objective functions under a cri-
terion.
A combination of the values of the objective func-
tions is represented as an objective vector.
Definition 2 (Objective vector). Objective vector v
is defined as [v
1
, · ·· , v
K
]. For assignment A to the
variables in X
j
, v
j
is defined as v
j
= f
j
(A
↓X
j
).
Since the goal cannot be achieved because of
trade-offs between the objectives in general cases, a
Pareto optimal solution is selected based on several
criteria (Sen, 1997; Marler and Arora, 2004).
Leximin is defined as the dictionary order on ob-
jective vectors whose values are sorted in ascending
order (Bouveret and Lema
ˆ
ıtre, 2009; Greco and Scar-
cello, 2013; Matsui et al., 2014; Matsui et al., 2015).
Definition 3 (Sorted-objective vector). The values of
sorted-objective vector v are sorted in ascending or-
der.
Definition 4 (Leximin). Let v = [v
1
, · ·· , v
K
] and v
0
=
[v
0
1
, · ·· , v
0
K
] denote the sorted-objective vectors whose
length is K. The order relation, denoted with ≺
leximin
,
is defined as follows: v ≺
leximin
v
0
if and only if
∃t, ∀t
0
< t, v
t
0
= v
0
t
0
∧ v
t
< v
0
t
.
Since leximin is a criterion that repeats the com-
parison between the minimum values in the vectors,
it improves the worst-case values. This maximiza-
tion also relatively improves the fairness and ensures
Pareto optimality.
The addition of two sorted-objective vectors is de-
fined with concatenation and resorting.
Definition 5 (Addition of sorted-objective vec-
tors). Let v and v
0
denote vectors [v
1
, · ·· , v
K
] and
[v
0
1
, · ·· , v
0
K
0
], respectively. The addition of two vectors,
v ⊕ v
0
, is represented as v
00
= [v
00
1
, · ··v
00
K+K
0
], where v
00
consists of all the values in v and v
0
. In addition, the
values in v
00
are sorted in ascending order.
For the addition of sorted-objective vectors, the
following invariance exists that enables dynamic pro-
gramming to solve optimization problems with the
leximin (Matsui et al., 2014).
Proposition 1 (Invariance of leximin on addition).
Let v and v
0
denote sorted-objective vectors of the
same length. In addition, v
00
denotes another sorted-
objective vector. If v ≺
leximin
v
0
, then v ⊕ v
00
≺
leximin
v
0
⊕ v
00
.
Sorted objective vectors and related operations
can be performed with a representation of a sorted his-
togram or a run-length encoding that is a vector of the
sorted pairs of an objective value and the count of the
value (Matsui et al., 2014; Matsui et al., 2015).
To evaluate the inequality among different-size
populations, we employ the Theil index, a well-
known measurement of inequality.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
336

Definition 6 (Theil index). For n objectives, Theil in-
dex T is defined as
T =
1
n
∑
i
v
i
¯v
log
v
i
¯v
(2)
where v
i
is the income or cost value of an objective
and ¯v is the mean utility value for all the objectives.
The Theil index takes a value in [0, log n]. When
all utilities or cost values are identical, the Theil index
value is zero.
2.3 Application to Shortest Path
Problems
The concept of leximin has been applied to shortest
path problems (Matsui et al., 2018). The original
problem is a minimization problem for the total cost
values of edges in paths on a graph. In the previous
work, the criterion was replaced by a criterion simi-
lar to leximin to improve the worst-case cost values
and fairness among edges. Since shortest path prob-
lems are minimization problems, the maximization
on leximin is replaced by the minimization of similar
criteria called leximax with sorted-objective vectors
whose value ordering is inverted.
Definition 7 (Descending sorted-objective vector).
The values of a descending sorted-objective vector
are sorted in descending order.
Definition 8 (Leximax). Let v = [v
1
, · ·· , v
K
] and
v
0
= [v
0
1
, · ·· , v
0
K
] denote descending objective vectors
whose lengths are K. The order relation, denoted with
≺
leximax
, is defined as follows. v ≺
leximax
v
0
if and only
if ∃t, ∀t
0
< t, v
t
0
= v
0
t
0
∧ v
t
< v
0
t
.
The addition of two descending sorted-objective
vectors is defined similarly to the leximin.
In route optimization problems, the paths and
corresponding sorted-objective vectors with different
lengths must be compared. For this comparison, lexi-
max is extended to variable-length leximax, vleximax.
Definition 9 (Vleximax). Let v = [v
1
, · ·· , v
K
] and
v
0
= [v
0
1
, · ·· , v
0
K
0
] denote descending sorted-objective
vectors whose lengths are K and K
0
, respectively. For
K = K
0
, ≺
vleximax
is the same as ≺
leximax
. In other
cases, zero values are appended to one of the vectors
so that both vectors have the same number of values.
Then, the vectors are compared based on ≺
leximax
.
This comparison is intuitively based on two mod-
ified vectors that have the same sufficient length by
padding blanks with zeros. Such padding values can
be omitted in actual computation. Moreover, the vec-
tor can be represented with a histogram or a run-
length encoding with sorted objective values when the
cost values are a relatively small set of discrete values.
Addition and comparison of the vectors are also per-
formed on the histograms.
With vleximax, path-finding methods based on
dynamic programming including the Dijkstra algo-
rithm and the A* algorithm (Hart and Raphael, 1968;
Hart and Raphael, 1972; Russell and Norvig, 2003)
have been naturally extended. On the other hand, it
has been shown that the extension of the Learning
Real-time A* algorithm (Barto et al., 1995) is not
straightforward, and a heuristic approach to mitigate
the problem has been proposed (Matsui et al., 2018).
3 APPLYING
LEXIMIN/LEXIMAX TO
Q-LEARNING
We investigated the lexmin/leximax criterion with Q-
learning. The Q-learning can be considered an exten-
sion of the Learning Real-time A* algorithm, the cri-
terion is similarly applied. Below, we address several
issues in the case of reinforcement learning.
Similar to the distance values of the shortest path
problems with vleximax, we focus on the class of re-
inforcement learning problems where the cost or re-
ward values take a few discrete values. We mainly
address minimization problems where cost values are
defined for each state. Moreover, we assume that
there are a start state and a goal state that ensure
an optimal episode from the start state to the goal
state. Since one of our goals is the equalization of
cost/reward values within episodes, an agent learns
the policy based on complete observation.
3.1 Representation of Sorted-objective
Vector
For shortest path problems with vleximax, differ-
ent lengths of sorted-objective vectors are employed.
In actual implementation, the sorted-objective vec-
tor can be represented as a histogram or run-length
encoded data to reduce its size and computational
cost. However, with Q-learning, there is the issue
of weighted average among the different lengths of
sorted-objective vectors. The original representation
of the different lengths of vectors cannot be employed
to average any two vectors. Therefore, only the his-
togram representation can be extended to aggregate
two vectors with the weight values. As a result, the
definition of the histograms must be modified so that
they take real values. While such a representation is
not a histogram, we call it a real-valued histogram.
Reinforcement Learning Considering Worst Case and Equality within Episodes
337

Definition 10 (Real-valued histogram and opera-
tions). A real-valued histogram is an extended rep-
resentation of a histogram of discrete values, where
a count value for a discrete value to be counted can
take a real value. Addition v
00
= v ⊕ v
0
of two real-
valued histograms v and v
0
is defined as: v
00
i
= v
i
+ v
0
i
for each i
th
value of the real-valued histograms. Addi-
tion v
00
= i + v
0
of a discrete value i and a real-valued
histogram v
0
that contains the count of i is defined
as: v
00
i
= v
0
i
+ 1 and v
00
j
= v
0
j
for each j
th
value, where
i 6= j. Product v
00
= wv
0
of a real value w and a real-
valued histogram v
0
is defined as: v
00
i
= w · v
0
i
for each
i
th
value.
The comparison of vleximax with histogram rep-
resentation can be defined for the count values sim-
ilarly to the case of integer count values. With the
above operations, the weighted average v
00
= wv ⊕
(1−w)v of two real-valued histograms is represented.
Proposition 2 (Weighted average of real-valued his-
tograms). A weighted average of two real-valued his-
tograms is an intermediate real-valued histogram of
the two real-valued histograms in the ordering of
vleximax.
Proof. The weighed average of two real-valued his-
tograms has weighted average values that are sepa-
rately aggregated for count values corresponding to
discrete values to be counted. Therefore, a count
value of each discrete value to be counted is between
the count values of the same discrete value in the
two real-valued histograms. Since vleximax com-
pares count values from the maximum discrete val-
ues, the aggregated real-valued histogram is between
two real-valued histograms in the ordering of vlexi-
max.
The above weighted average is actually a statis-
tical aggregation of populations regarding individual
discrete cost values. Other types of aggregation of
vectors can be available if such aggregation opera-
tions satisfy a similar property.
With the operators for real-valued histograms is
the Q-learning is represented as follows:
Q(s, a) ←(1 − α)Q(s, a)⊕
α(c + γ min
vleximax
a
0
Q(s
0
, a
0
)) ,
(3)
where Q-values are replaced by real-valued his-
tograms Q(s, a). We call these Q-histograms.
For maximization problems, the rule can basically
be replaced with rewards and a maximization operator
on ‘vleximin’ that compares real-valued histograms
whose discrete values are sorted in ascending order.
However, an applicable class of maximization prob-
lems can differ from those of minimization problems
similar to the cases of the original Q-learning.
3.2 Parameters for Learning and
Exploration/Exploitation
Although the settings of parameters for learning
and exploration/exploitation resemble the original Q-
learning with summation, part of settings affects the
case of real-valued histograms and vleximax. The
learning rate α can be set to an arbitrary value for de-
terministic state transition cases, while the values less
than one might cause a significant delay of the con-
vergence for real-valued histograms. The settings are
related to classes of problems as shown in the follow-
ing sections.
In the case of Q-learning for minimizing prob-
lems that are similar to shortest path problems, the
discount rate γ should be set to one because the Q-
values/histograms are aggregated to capture the costs
for a whole episode. Therefore, the limitation of fu-
ture information will decrease the accuracy of policies
in both cases with the original summation values and
the real-valued histograms.
Appropriate exploitation and exploration strate-
gies and parameters such as the epsilon-greedy
method can be used.
3.3 Acyclic State Transition Cases
Here, we consider simple cases where the state tran-
sition is acyclic and deterministic. A state transi-
tion space of this class of problems can be repre-
sented with a directed acyclic graph whose vertexes
and edges represent states and actions. In addition,
we address the case where there are a start sate and a
goal state such that there are paths between two states.
Since an episode consists of a sequence of differ-
ent state-action pairs, the propagation of Q-learning
from the goal state to the start state is eventually
achieved. Therefore, the Q-learning is correctly
works with vleximax.
Like vleximax, both minimization and maximiza-
tion problems can be learned with Q-learning meth-
ods with summation and vleximax/vleximin criteria.
In this case, the initial Q-values/histograms can be set
with arbitrary values including zero, while it might
affect the convergence of the Q-values/histograms.
3.4 Cyclic State Transition Cases
Next, we consider the cases where state transition can
be cyclic. We also address the case where there are
a start sate and a goal state such that there are paths
between two states. Although the original Q-learning
with summation is applicable without modifications,
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
338

the case of Q-histograms and vleximax requires a few
considerations.
With the Learning Real-time A* algorithm for
shortest path problems, minimization with vleximax
is problematic because it is driven with lower-bound
cost values and emphasizes cyclic paths that resemble
negative cycles (Matsui et al., 2018). This contrasts
with the minimization with the summation that cor-
rectly works with both upper and lower bound cost
values. Q-learning has the similar issue.
A simple way to perform the learning based on
upper bound cost values is to set the initial values of
the Q-histograms at a sufficiently large upper bound
value similar to the Dijkstra method. Namely, the
count values of the Q-histograms are set to a suffi-
ciently large value considering the convergence time
of the Q-histograms. Since this is not a complete way,
the correct propagation of learning from the goal state
must be assured by the setting of parameters and ex-
plorations.
With algorithms such as the Learning Real-time
A* algorithm, both of learning and exploration rules
are driven based on the lower-bound cost values.
Therefore, the learning has been modified to episode-
based learning with a heuristic exploration strat-
egy. On the other hand, the Q-learning is basically
performed with random-walk-based exploration and
there might be opportunities to find the goal state. The
random walk based algorithm can be available for rel-
atively small problems, while the length of explored
episodes might be significantly longer.
In the case of cyclic state transition, the defini-
tion of the maximization problem is not straightfor-
ward for the real-valued histogram and vleximax. Al-
though minimization problems with summation sim-
ilar to path-finding problems can be relatively eas-
ily replaced by maximization problems with potential
fields where only the goal states have rewards, this
differs from our aim of equalizing cost/reward values
in an episode.
3.5 Stochastic Cases
When the state transition is stochastic, the solution
quality of an episode generally decreases. Since min-
imization with vleximax aims the equalization of fu-
ture cost/reward values, the noise is serious. In this
case, the weighted average of Q-histograms might
confuse the learning, since it separately aggregate the
count of each discrete cost value.
Therefore, in relatively noisy environments, the
aggregated Q-histograms cannot adequately empha-
size the probabilistically best episode. In such
cases the minimization with vleximax tends toward
1 2 3
4 5 6
7 8 9
1 2 3
4 5 6
7 8 9
DAG CYC
Figure 1: Problems (3 × 3).
nonsense and the original Q-learning with summa-
tion reduces both the maximum and summation of
cost/reward values. While the limitation is substan-
tial for our problem settings, the Q-learning still work
if the result of statistic aggregation can hold the
episodes in environments with little noise.
3.6 Properties of Solution Method
Since the proposed approach inherits a major part
form the shortest path finding with vleximax shown
in (Matsui et al., 2018), it can be optimal as vleximax
in the case of deterministic and acyclic state transi-
tion. The correctness depends on an exploration and
the learning ratio that ensure the propagation of learn-
ing from the goal state to the start state. Similar prop-
erty holds in the case case of minimization problems
with deterministic and cyclic state transition.
The weighted average of the real-valued his-
togram is reasonable in the meaning that it is an in-
termediate real-valued histogram of the original ones.
While it converges to (near) optimal histogram in de-
terministic transition cases with appropriate explo-
ration and learning, in stochastic transition cases, a
weighted average of individual count values might be
inaccurate.
The computational and memory cost for the ad-
dition, weighted average and vleximax of real-valued
histograms is greater than those of scalar cost values.
However, it linearly grows with the number of dis-
crete cost values to be counted. Therefore, it is ap-
plicable to histograms with relatively small range of
discrete cost values.
4 EVALUATION
4.1 Problem Settings
We experimentally evaluated the proposed method
with fundamental benchmark problems based on the
w × h lattice directed graphs shown in Figure 1. Ver-
texes and edges of the graphs represent states and
transitions corresponding to actions.
Reinforcement Learning Considering Worst Case and Equality within Episodes
339

The following two types of state transition models
are employed.
• DAG: State transitions are acyclic. To increase
different episodes, diagonal-directed edges are
added.
• CYC: State transitions are cyclic.
As the initial value of Q-values/histograms, we em-
ployed 100 for both DAG and CYC. In addition, two
cases of transitions are considered:
• DET: State transitions are deterministic. There-
fore, an action and a state transition exactly corre-
spond to a directed edge.
• NDT: State transitions are non-deterministic.
Each action a is successfully performed with
probability p
a
. In this case, the state transition
is the same as DET. Otherwise, a state transition
corresponding to one of the other actions is ran-
domly performed with uniform distribution. We
randomly set p
a
of action a from [p
⊥
, 1] with uni-
form distribution.
We set the start state and goal state to the left-top
and right-bottom states. Each state except the start
state gives a cost value. The cost value of each edge
was randomly set from the integer values in [1, c
>
]
based on uniform distribution, where c
>
was 5 or 10.
We performed minimization methods with the fol-
lowing two criteria.
• SUM: Minimization of summation for scalar cost
values.
• LXM: Minimization with vleximax for real-
valued histograms of cost values.
We varied learning rate α and discount rate γ. To
eliminate the influence of heuristic exploration, ran-
dom walk was performed for learning. As the ex-
ploitation of learned Q tables, episodes that perform a
sequence consisting of each best action in each state
were evaluated. In the case of NDT, 100 episodes
were averaged for evaluation.
Each episode was performed for at most 2000
steps. In each trial, at most 1,000,000 episodes were
performed. For each setting of problems results over
ten instances were averaged. The experiment was per-
formed on a computer with a Core i7-3930K CPU
(3.20 GHz), 16-GB memory, Linux 2.6.32, and g++
(GCC) 4.4.7.
4.2 Results
Table 1 shows the results of DAG, DET, 10 × 10 grid,
c
>
= 10, and γ = 1. Here, the statistic length of
objective vector that is calculated from a real-valued
Table 1: DAG, DET, 10 × 10, c
>
= 10, γ = 1.
alg. α len. sum. max. theil
SUM 0.25 10.5 37.3 8.1 0.191
0.5 10.8 37.3 8 0.189
1 10.8 37.3 8 0.189
LXM 0.25 11.4 44.7 7.4 0.128
0.5 11.5 41.3 7.3 0.142
1 11.6 42.2 7.3 0.135
Table 2: DAG, DET, 10 × 10, c
>
= 10, γ = 0.5.
alg. α len. sum. max. theil
SUM 0.25 13.6 44.8 8 0.204
0.5 13.6 44.8 8 0.204
1 13.6 44.8 8 0.204
LXM 0.25 15.1 58.4 7.4 0.127
0.5 15.9 60.4 7.3 0.121
1 16 60.1 7.3 0.120
Table 3: DAG, DET, 20 × 20, c
>
= 10, γ = 1.
alg. α len. sum. max. theil
SUM 0.25 23.6 73.8 8.5 0.216
0.5 23.8 73.8 8.6 0.212
1 23.8 73.8 8.6 0.212
LXM 0.25 22.3 100.1 8.2 0.151
0.5 24.8 82.8 7.3 0.151
1 25.7 84.3 7.1 0.149
Table 4: DAG, DET, 10 × 10, c
>
= 5, γ = 1.
alg. α len. sum. max. theil
SUM 0.25 10.4 21.1 4.3 0.143
0.5 10.7 21.1 4.2 0.137
1 10.7 21.1 4.2 0.137
LXM 0.25 11.2 22.4 4 0.117
0.5 10.8 22.7 4 0.112
1 11.2 22.4 4 0.117
histogram (len.), the total cost (sum.), the maximum
cost (max.), the Theil index (theil) are evaluated. On
average, SUM decreased the total cost value, while
LXM decreased the maximum cost and the Theil in-
dex. Due to a trade off, the length and the summation
in LXM are grater than SUM. While different learn-
ing rates affected the convergence, the results resem-
ble in this problem setting.
Table 2 shows the results of DAG, DET, 10 × 10
grid, c
>
= 10, and γ = 0.5. In this case, the accuracy
of both SUM and LXM decreased as compared to that
of γ = 1, since the problem resembles shortest path
problems as mentioned in Section 3.2. Table 3 shows
the results of DAG, DET, 20 × 20 grid, c
>
= 10, and
γ = 1. The results resemble the case of 10 × 10 prob-
lems, while the cost values and the length of policies
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
340
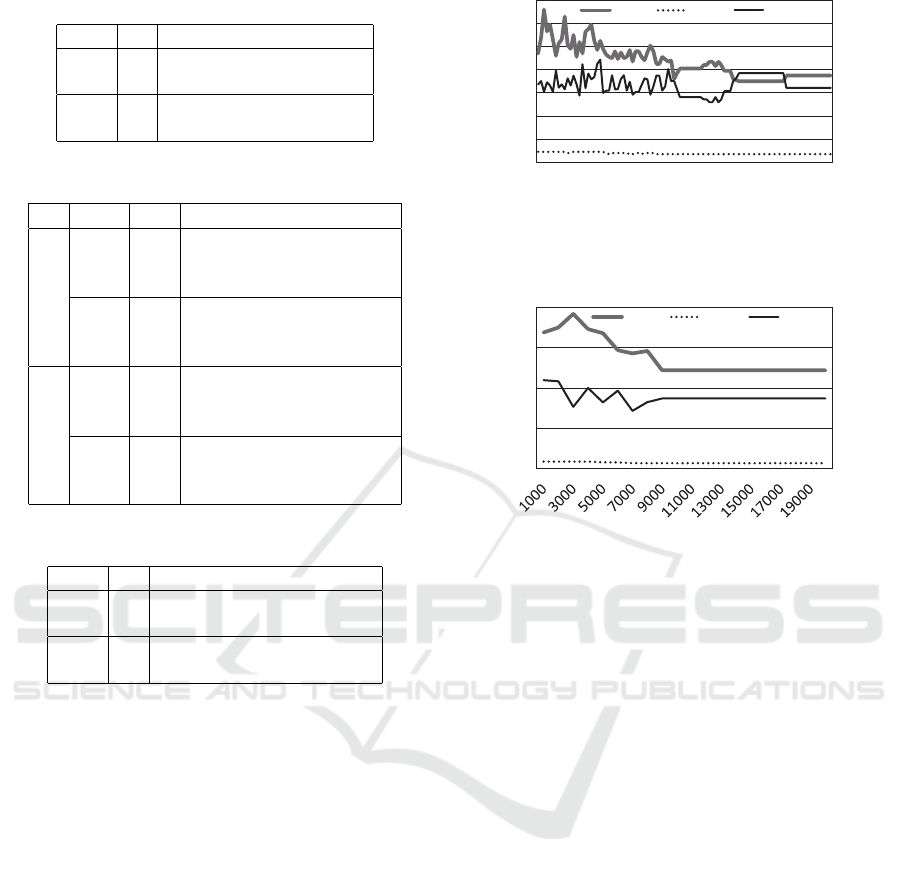
Table 5: CYC, DET, 5 × 5, c
>
= 10, γ = 1.
alg. α len. sum. max. theil
SUM 0.5 8 29 8.2 0.227
1 8 29 8.2 0.227
LXM 0.5 8 30.1 7.8 0.198
1 8 30.1 7.8 0.198
Table 6: DAG, NDT, 10 × 10, c
>
= 10, γ = 1.
p
⊥
alg. α len. sum. max. theil
0.7 SUM 0.25 11.7 44.8 8.62 0.202
0.5 11.6 45.8 8.52 0.189
1 12.6 51.3 8.69 0.189
LXM 0.25 13.9 67.3 8.81 0.146
0.5 13.9 67.8 8.92 0.155
1 13.5 57.6 8.70 0.149
0.9 SUM 0.25 11.0 40.0 8.28 0.187
0.5 10.8 39.9 8.10 0.195
1 11.7 44.2 8.25 0.181
LXM 0.25 14.0 68.4 8.75 0.157
0.5 14.3 71.0 8.82 0.143
1 12.6 48.0 7.99 0.146
Table 7: CYC, NDT, p
⊥
= 0.95, 5 × 5, c
>
= 10, γ = 1.
alg. α len. sum. max. theil
SUM 0.5 8.2 30.2 8.142 0.215
1 31.8 166.1 8.137 0.230
LXM
1 8.5 32.5 7.846 0.200
are relatively large for both methods. As shown in
Table 4, where the range of cost values is [1, 5], the
narrow range of cost values decreases the opportuni-
ties of differences between SUM and LXM.
Table 5 shows the results of CYC, DET, 5×5 grid,
c
>
= 10, and γ = 1. Here, we had to set the ini-
tial value of Q-histograms to an upper bound value of
100, since the initial value of zero results in incorrect
cyclic episodes in the case of LXM, as mentioned in
Section 3.4. Indeed, with zero initial values, resulting
episodes emphasized incorrect cyclic paths. With the
appropriate upper-bound values, the results resemble
for the cases of DAG. In the cyclic case, the conver-
gence of LXM takes a number of episodes with the
learning rates less than one, while it converged in rel-
atively smaller number of episodes with the learning
rate of one even in 20 × 20 problems.
Table 6 shows the results of DAG, NDT, 10 × 10
grid, c
>
= 10, and γ = 1. In the cases of non-
deterministic state transitions, the accuracy of vlex-
imax significantly decreased. As shown in the case
of p
⊥
= 0.7, with high randomness of state transi-
tion, LXM cannot overcome SUM in any metrics ex-
0
0.1
0.2
0.3
0.4
0
20
40
60
80
100
120
140
1000
8000
15000
22000
29000
36000
43000
50000
57000
64000
71000
78000
85000
92000
99000
theil
cost
Episode
sum. max. theil
Figure 2: DAG, DET, 20 × 20, c
>
= 10, α = 0.5, γ = 1,
LXM.
0
0.1
0.2
0.3
0.4
0
50
100
150
200
theil
cost
Episode
sum. max. theil
Figure 3: CYC, DET, 20 × 20, c
>
= 10, α = 0.5, γ = 1,
LXM.
cept the Theil index. Since this is a substantial is-
sue of problem definition, use of vleximax should be
determined considering the opportunities of the real-
valued histograms capturing information within each
episode. We found that LXM with the learning rate
of one is better in these cases as shown in the case of
p
⊥
= 0.9. This reveals the difficulty in the statistic
aggregation of objective vectors. Table 7 shows the
cases of CYC, NDT, p
⊥
= 0.95, 5 × 5, c
>
= 10, and
γ = 1. Although the convergence of LXM was severe
in most problem instances, the converged results re-
semble the cases of DAG and NDT.
Figures 2 and 3 show examples of anytime curves
of learning for LXM in DET. The optimal policies
are iteratively evaluated based on learned Q tables.
The accuracy gradually improved with the progress
of learning.
The averaged computational times including
statistic operations for evaluation were 0.936 and
1.645 seconds for SUM and LXM in a DAG, 20 × 20
grid setting and 100,000 episodes. For the CYC,
20 × 20 grid, it took 39.782 and 74.359 seconds. The
above time of LXM for CYC contains the anytime
evaluation in the worst-case of cyclic episodes up to
2000 steps.
Reinforcement Learning Considering Worst Case and Equality within Episodes
341

5 DISCUSSION
Since the proposed approach resembles an extension
of shortest path problems, it can be applied to the
class of similar problems in the context of reinforce-
ment learning including the case of positive rewards
on acyclic state transition. In the other cases based on
a potential field, more consideration is necessary to
model such problems.
A shown in (Matsui, 2019), applying the idea
of leximin/leximax to optimization of joint policies
among multiple agents so that the equality of indi-
vidual agents is improved is difficult because the ag-
gregation of sorted-objective vectors cannot be well
decomposed in a direction of episodes. On the other
hand, the class of problems in this study is relatively
better, since the decomposition of a real-valued his-
togram is based on dynamic programming. However,
more investigations are necessary to discuss whether
this approach can appropriately fit some class of mul-
tiagent or multi-objective problems.
Vleximax is based on the assumption that predic-
tion of future optimal episodes is possible. Therefore,
it cannot be employed in highly stochastic problems.
On the other hand, where statistically optimal policy
can be calculated with real-valued histograms, there
may be opportunities to improve policies with vlexi-
max.
We employed a simple definition of the weighted
average of real-valued histograms with scalar weight
values. It may be possibile to use weight vectors to
emphasize part of the discrete cost values. In addition,
other aggregation operators that differently generate
a histogram from the original two histograms could
affect solution quality.
6 CONCLUSIONS
We investigated applying a leximin based criterion to
the Q-learning method to consider the worst-case and
equality among individual cost/reward values in an
episode. The experimental results show that the crite-
rion is effective in several cases of problems, while
more considerations are necessary to employ it to
other problem classes.
Our future work will include, improvement of the
proposed method, and investigations applying the cri-
terion to part of the practical multi-objective and mul-
tiagent problems.
ACKNOWLEDGEMENTS
This work was supported in part by JSPS KAKENHI
Grant Number JP19K12117 and Tatematsu Zaidan.
REFERENCES
Barto, A. G., Bradtke, S. J., and Singh, S. P. (1995). Learn-
ing to act using real-time dynamic programming. Ar-
tificial Intelligence, 72(1-2):81–138.
Bouveret, S. and Lema
ˆ
ıtre, M. (2009). Computing leximin-
optimal solutions in constraint networks. Artificial In-
telligence, 173(2):343–364.
Greco, G. and Scarcello, F. (2013). Constraint satisfac-
tion and fair multi-objective optimization problems:
Foundations, complexity, and islands of tractability.
In Proc. 23rd International Joint Conference on Arti-
ficial Intelligence, pages 545–551.
Hart, P., N. N. and Raphael, B. (1968). A formal basis
for the heuristic determination of minimum cost paths.
IEEE Trans. Syst. Science and Cybernetics, 4(2):100–
107.
Hart, P., N. N. and Raphael, B. (1972). Correction to ’a for-
mal basis for the heuristic determination of minimum-
cost paths’. SIGART Newsletter, (37):28–29.
Marler, R. T. and Arora, J. S. (2004). Survey of
multi-objective optimization methods for engineer-
ing. Structural and Multidisciplinary Optimization,
26:369–395.
Matsui, T. (2019). A study of joint policies considering bot-
tlenecks and fairness. In 11th International Confer-
ence on Agents and Artificial Intelligence, volume 1,
pages 80–90.
Matsui, T., Silaghi, M., Hirayama, K., Yokoo, M., and Mat-
suo, H. (2014). Leximin multiple objective optimiza-
tion for preferences of agents. In 17th International
Conference on Principles and Practice of Multi-Agent
Systems, pages 423–438.
Matsui, T., Silaghi, M., Hirayama, K., Yokoo, M., and Mat-
suo, H. (2018). Study of route optimization consider-
ing bottlenecks and fairness among partial paths. In
10th International Conference on Agents and Artifi-
cial Intelligence, pages 37–47.
Matsui, T., Silaghi, M., Okimoto, T., Hirayama, K., Yokoo,
M., and Matsuo, H. (2015). Leximin asymmetric mul-
tiple objective DCOP on factor graph. In 18th In-
ternational Conference on Principles and Practice of
Multi-Agent Systems, pages 134–151.
Russell, S. and Norvig, P. (2003). Artificial Intelligence: A
Modern Approach (2nd Edition). Prentice Hall.
Sen, A. K. (1997). Choice, Welfare and Measurement. Har-
vard University Press.
Sutton, R. S. and Barto, A. G. (1998). Reinforcement learn-
ing : an introduction. MIT Press.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
342
