
3D Object Detection from LiDAR Data using Distance Dependent
Feature Extraction
Guus Engels
1 a
, Nerea Aranjuelo
1 b
, Ignacio Arganda-Carreras
2,3,4 c
, Marcos Nieto
1 d
and Oihana Otaegui
1 e
1
Vicomtech Foundation, Basque Research and Technology Alliance (BRTA), Mikeletegi 57, San Sebastian, Spain
2
Basque Country University (UPV/EHU), San Sebastian, Spain
3
Ikerbasque, Basque Foundation for Science, Bilbao, Spain
4
Donostia International Physics Center (DIPC), San Sebastian, Spain
Keywords:
LiDAR, 3D Object Detection, Feature Extraction, Point Cloud.
Abstract:
This paper presents a new approach to 3D object detection that leverages the properties of the data obtained
by a LiDAR sensor. State-of-the-art detectors use neural network architectures based on assumptions valid for
camera images. However, point clouds obtained from LiDAR data are fundamentally different. Most detectors
use shared filter kernels to extract features which do not take into account the range dependent nature of the
point cloud features. To show this, different detectors are trained on two splits of the KITTI dataset: close
range (points up to 25 meters from LiDAR) and long-range. Top view images are generated from point clouds
as input for the networks. Combined results outperform the baseline network trained on the full dataset with a
single backbone. Additional research compares the effect of using different input features when converting the
point cloud to image. The results indicate that the network focuses on the shape and structure of the objects,
rather than exact values of the input. This work proposes an improvement for 3D object detectors by taking
into account the properties of LiDAR point clouds over distance. Results show that training separate networks
for close-range and long-range objects boosts performance for all KITTI benchmark difficulties.
1 INTRODUCTION
”LiDAR is a fool’s errand and anyone relying on Li-
DAR is doomed.” - Elon Musk, CEO of Tesla. The
CEO of Tesla, a company that puts tremendous ef-
fort in the development of autonomous vehicles does
not see value in using the LiDAR sensor, but a vast
number of researchers and companies disagree and
have shown that including LiDAR in their perception
pipeline can be beneficial for advanced scene under-
standing.
LiDAR is an abbreviation for light detection and
ranging. It is a sensor that uses laser light to mea-
sure the distance to objects and their reflectiveness.
It sends out beams of light that diverge over the dis-
tance and reflect if an object is hit. It has proven to be
a
https://orcid.org/0000-0002-4575-4872
b
https://orcid.org/0000-0002-7853-6708
c
https://orcid.org/0000-0003-0229-5722
d
https://orcid.org/0000-0001-9879-0992
e
https://orcid.org/0000-0001-6069-8787
useful for many applications in areas such as archae-
ology and geology. However, there are some down-
sides that prohibit the adoption of widespread use for
autonomous driving. Currently, LiDAR is an expen-
sive, computationally demanding sensor that requires
some revision of the car’s layout. Cameras are a rich
source of information that are very cheap in compar-
ison. Nonetheless, there are situations where cam-
eras struggle and LiDAR can be of significant help.
Driving in low light conditions is challenging for a
camera, but does not make a difference for LiDAR
because it does not depend on external light sources.
Overall, the future of LiDAR and its role in a future
autonomous vehicle is unclear, but it does have very
valuable properties that can play an important role in
autonomous driving and make its research decisive.
For self-driving vehicles it is of the utmost im-
portance to be aware of its surroundings. Therefore,
objects have to be located in the 3D space around
the ego vehicle, which requires using sensors such
as LiDAR to capture the surrounding information.
Research into 3D object detection and LiDAR have
Engels, G., Aranjuelo, N., Arganda-Carreras, I., Nieto, M. and Otaegui, O.
3D Object Detection from LiDAR Data using Distance Dependent Feature Extraction.
DOI: 10.5220/0009330402890300
In Proceedings of the 6th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2020), pages 289-300
ISBN: 978-989-758-419-0
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
289
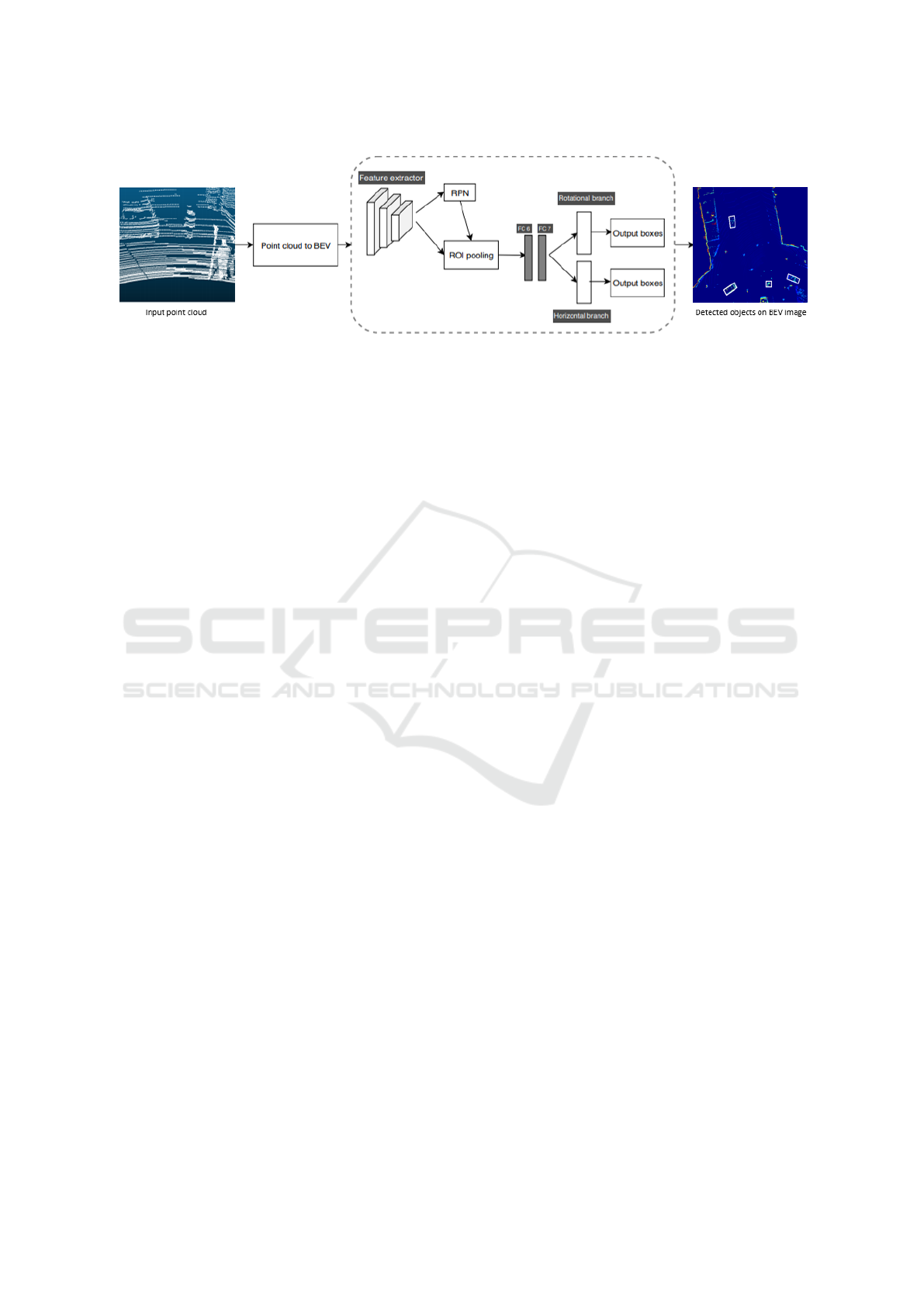
Figure 1: Proposed pipeline for 3D object detection using point clouds as input. In this method, point clouds are converted
to bird’s eye view (BEV) images in the ”point cloud to BEV” stage. The point cloud is compressed to an image according
to one of four configurations explained in the Methods section. The architecture inside the dotted lines is a Faster R-CNN
architecture with an additional rotation branch that makes it possible to output rotated bounding boxes. RPN stands for region
proposal network, which searches for regions of interest for the head-network that tries to classify and regress bounding boxes
around these objects. ROI pooling converts different sized regions of interest to a common 7 × 7 so it can be handled by two
fully connected layers called FC6 and FC7. The output of these layers are send to the last branches that predict either rotated
or horizontal bounding boxes with a class label.
gone hand in hand. The most influential dataset for
3D object detection for autonomous applications has
been the KITTI dataset (Geiger et al., 2013). It hosts
leaderboards where different methods are compared.
The growing interest in 3D object detection can be
observed from these leaderboards, where the state of
the art gets replaced quickly by newer architectures.
The best performing network in 2018, Pixor (Yang
et al., 2019a), only just falls in the top 100 as of Octo-
ber 2019. All detectors on the leaderboards, used for
3D object detection are influenced in varying degrees
by 2D detectors. It is obvious that the advances in
2D object detection can be of big help for 3D object
detection. However, 2D object detection is done on
images, a very different data type compared to point
cloud data. The LiDAR beams diverge, which causes
objects placed farther away to be represented with less
points than the exact same object nearby. This is very
different compared to images, where the object be-
comes smaller when it is farther away, but the under-
lying features and its representation are still the same.
The effect of this has not yet received much attention
in the literature.
In this paper, differences between image and point
cloud data are researched. A new pipeline is pro-
posed that learns different feature extractors for ob-
jects that are close by and far away. This is necessary
because features in these two ranges are very differ-
ent, and one shared feature extractor would perform
sub-optimally in both ranges. Furthermore, visualiza-
tion of the changing features over the distance is pro-
vided. Previous works like ZFnet (Zeiler and Fergus,
2013) were not only able to increase performance, but
also showed the importance of understanding how the
network operates. Inspired by this we focus on how
point cloud input data is different from image input
data to have a better understanding of the limitations
of using 2D CNNs on point clouds. In addition we
show how to alter the detection pipeline to exploit
these differences.
To summarize, the contributions of this paper are
the following:
• We provide an analysis into the effects of different
input features on the detection performance.
• We show the influence of the changing represen-
tation over distance and how it affects the under-
lying features of the objects on the car class.
• We propose a new detection pipeline that is able
to learn different feature extractors for close-by
objects and far-away objects.
2 RELATED WORK
3D object detection has been tackled with many dif-
ferent approaches. The first networks were heavily
influenced by 2D detectors. They converted point
clouds to top view images, which made it possible
to use conventional 2D detectors. A variety of input
features and conversion methods were used. Many of
these detectors have been later on improved by adding
more information from other sensors or maps.
Currently, most of the best performing architec-
tures use methods that directly process the point cloud
data (Shi et al., 2019; Yang et al., 2019b). They do
not require handcrafted features or conversion to im-
ages like the previous methods did. As of late, new
datasets have become public and will push the field of
3D object detection further forward.
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
290

2.1 2D CNN Approaches
Many early and current 3D object detectors are ad-
justed 2D object detectors such as Faster R-CNN (Ren
et al., 2015) and YOLO (Redmon et al., 2015). In
particular, ResNet (He et al., 2015) is often used as
backbone network for feature extraction. In order to
detect 3D objects with 2D detectors, point clouds are
compressed to image data. Two common representa-
tions are (i) a front view approach like in LaserNet
(Meyer et al., 2019) and (ii) a bird’s eye view (BEV)
approach where point cloud data are compressed in
the height dimension (Beltr
´
an et al., 2018) . Some
methods only use three input channels to keep the in-
put exactly the same as for 2D detectors. Other meth-
ods use more height channels to save more impor-
tant height information of the point cloud (Yang et al.,
2019a; Chen et al., 2017). Which features are impor-
tant to retain has been researched before but is still an
open research topic. The BEV has proven to be such
a powerful representation that methods using camera
data convert their data to a BEV to perform well on
3D object detection tasks (Wang et al., 2018). How
the conversion from point cloud to BEV is performed
will be explained in the Methods section.
2.2 Multimodal Approaches
A modern autonomous vehicle will have more than
just a LiDAR sensor. This is why many methods use
a multimodal approach that combines LiDAR with
camera sensors (Chen et al., 2017; Liang et al., 2019;
Ku et al., 2018; Qi et al., 2017). Other methods fuse
the data at different stages in the network. MTMS
(Liang et al., 2019) uses an earlier fusion method,
whereas M3VD (Chen et al., 2017) uses a deep fu-
sion method. Besides different sensors, map infor-
mation can also be employed to improve performance
(Yang et al., 2018a). Some approaches track objects
over frames (Luo et al., 2018; Weng and Kitani, 2019)
which boosts performance, especially for objects with
only a small number of LiDAR points and partially
occluded objects in a sequence.
2.3 Detection Directly on the Point
Cloud
A major shift in 3D object detection came when net-
works started to extract features directly from the
point cloud data. Voxelnet (Zhou and Tuzel, 2017)
introduced the VFE layer, which computed 3D fea-
tures from a set of points in the point cloud and stores
the extracted value in a voxel, containing the value
of a volume in 3D space, similar to what a pixel
does for 2D space. A second influential network that
works directly with the point cloud data is PointNet
(Qi et al., 2016). It processes directly on the un-
ordered point cloud and is invariant to transforma-
tions, such as translations and rotations. These two
methods are the foundation of many architectures in
the top 50 on the KITTI leaderboards. Pointpillars
(Lang et al., 2018) uses PointNet to extract features
and then transform it to a BEV representation to apply
a detector with a FPN inspired backbone (Lin et al.,
2016). Other networks use this approach and focus on
the orientation (Yan et al., 2018) or try bottom up an-
chor generation (Shi et al., 2018; Yang et al., 2018c).
2.4 Datasets
The KITTI dataset (Geiger et al., 2013) has been one
of the most widely used datasets for 3D object detec-
tion for autonomous driving so far. It is a large scale
dataset that contains annotations in the front camera
field of view for camera and LiDAR data. There
are three main classes, namely, cars, pedestrians and
cyclists. However, the car class contains more than
half of all objects (Geiger et al., 2013). As of late,
many new datasets have emerged. Most notable are
NuScenes (Caesar et al., 2019) and the H3D dataset,
of Honda (Patil et al., 2019). They are much larger
datasets, 360 degrees annotated and contain 1 million
and 1.4 million bounding boxes (respectively) com-
pared to 200k annotations in KITTI. The NuScenes
dataset was created with a 32-channel LiDAR, in
comparison to the KITTI and H3D dataset which
were both created with a 64-channel LiDAR. Sen-
sors with more channels are able to produce denser,
more complete 3D maps. The beam divergence will
be larger when there are less channels and will make
it more difficult to detect objects far away.
3 METHODS
In order to apply 3D object detection on LiDAR and
perform the different tests mentioned in the Introduc-
tion, a 3D object detection algorithm is implemented
according to the structure in Figure 1. The point cloud
is converted to images, which can then be used by
a Faster R-CNN detection network. This network is
used to evaluate the effect of different input features
on the performance and to create an architecture that
uses different kernel weights for different regions of
the LiDAR point cloud.
3D Object Detection from LiDAR Data using Distance Dependent Feature Extraction
291

3.1 Network
3.1.1 Architecture
The architecture of the full baseline network is dis-
played in Figure 1. The full architecture has a point
cloud as input and outputs horizontal and rotational
bounding boxes. A Faster R-CNN (Ren et al., 2015)
with a rotation regression branch in the head network
is used. The backbone network is ResNet-50 (He
et al., 2015) of which only the first three blocks are
used for the RPN network. Faster R-CNN is designed
for camera images where objects can have all kinds of
shapes. In a BEV image of LiDAR data all objects are
relatively small in comparison. To make sure that the
feature map is not downsampled in size too quickly,
the stride of the first ResNet block is adjusted from 2
to 1. This causes the output feature map to be four
times as big, which means that less spatial informa-
tion is lost. The object size in a BEV image is di-
rectly proportional to the physical size of that object.
This allows for tailoring the anchor boxes exactly to
the object size to serve as good priors. When cars are
rotated these anchor boxes will not fit accurately to
the objects. To account for this, different orientations
of the anchor boxes are considered similarly to (Yang
et al., 2018b; Simon et al., 2019). In total, sixteen dif-
ferent orientations in the anchor boxes are used. The
head network is slightly different from Faster-RCNN
because it contains an additional rotation head (Jiang
et al., 2017). Region proposals from the RPN network
and the output feature map of the RPN network are the
inputs of the head network. Region of interest pooling
(ROI) outputs 7 × 7 × 1024 feature maps for each ob-
ject proposal that are fed to two fully connected lay-
ers with 1024 parameters. These layers output four
bounding box variables for non rotated objects, more
specifically, the center of the box coordinates (x, y)
and the dimensions (h, w). The rotated boxes have an
additional parameter, θ, for the rotation angle of the
bounding box. Each box has a class confidence score.
The class with the highest score is the most likely for
this bounding box and it is used as output.
3.1.2 Point Cloud to BEV Image
Feature extractors such as ResNet are designed for
RGB images. Using this exact architecture requires
reshaping the point cloud input to a three channel im-
age. A common approach consists of compressing
the point cloud into a BEV image where the height
dimension is represented by three channels. Which
information to keep remains an open problem. In the
past, it was shown that the reflectiveness, or inten-
sity value, did not contribute much when there was
Figure 2: Point cloud conversion to bird’s eye view (BEV)
representation. This research uses four different possi-
ble configurations that are visualized in the bottom dotted
block. In the complete pipeline only one of these will be
used for each test.
maximum height information available (Beltr
´
an et al.,
2018). Pixor (Yang et al., 2019a) and MV3D (Chen
et al., 2017) use multiple height maps to retain more
height information. Instead of only storing 3 chan-
nels, as it would be the case in a regular 2D detec-
tor, they have an architecture that can handle inputs
of more than 3 channels. To test the effect of dif-
ferent features, the inputs are pre-processed in four
different input configurations. For all methods there
are some shared steps. Firstly, a 3D space of 0m
to 70m in longitudinal range, −35m to 35m in lat-
eral range and −1.73m to 1.27m in the height dimen-
sion is defined. The LiDAR in the KITTI setup is
located 1.73m off the ground, so −1.73m is where
the road is. All points that fall outside of this box
are not taken into account. For three of the four meth-
ods, 700 ×700×3 pixel images are considered, which
means that every 0.1 × 0.1 × 3m cube represents one
pixel. The last method uses more channels and is of
size 700 × 700 × 9. The exact specifications of the
channels are as follows:
Max Height Voxels: the cube can be divided in three
voxels with each 0.1m × 0.1m × 1m dimensions. The
first channel will have the height value of the highest
point from −1.73m to −0.73m range. The second
channel will have the highest value from −0.73m to
0.23m and the third one from 0.23m to 1.23m. An ad-
vantage of this method is that automatically a form of
ground removal takes place. The points very close to
the road are often not of much importance for the ob-
jects on the road. In addition, the highest points of an
object are in many cases what distinguishes them, and
therefore often the most important feature (Beltr
´
an
et al., 2018).
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
292

Figure 3: Representation of four cars at different ranges detected with a 64 channel LiDAR. The green arrow indicates the
vertical distance between four adjacent points and the red arrow indicates the horizontal distance between four adjacent points.
The distance of four points instead of the distance between adjacent points is used for visualization purposes.
Table 1: Statistics of the 4 cars, ordered from left to right.
Car number 1 2 3 4
distance [m] 7.6 16.0 24.4 43.0
vert spacing [cm] 4 9 13 22
hor spacing [cm] 2 5 8 13
amount of points 1797 627 226 25
Binary: for every voxel it is checked if there is at
least one LiDAR point present. If this is the case, this
channel gets the value 100, if not it gets the value 0.
The value 100 is chosen instead of 1 to make sure the
values have the same order of magnitude as the pre-
trained Imagenet (Deng et al., 2009) weigths. This
approach is an important indicator of how the network
handles the specific point cloud values. Consequently,
it is a baseline test to see if other features add value.
Multichannel Max Height Voxels: the input of only
three channels might not be enough since it means
that many of the original point cloud information is
lost. Using more height will provide the network with
more of the original information and should improve
the scores as was done in (Chen et al., 2017; Yang
et al., 2019a). Nine height maps are used as input to
the ResNet backbone instead of the three maps used
in the max height approach. To make sure that this
input is compatible with the ResNet feature extractor,
the pre-trained weights are duplicated three times and
stacked.
Height Intensity Density: instead of picking a subset
of the points from the point cloud, it is also possible
to compute features that could be interesting and feed
them to the network. This configuration has been used
in Birdnet (Beltr
´
an et al., 2018) before.
A visualization of how all the features are ex-
tracted is displayed in Figure 2. This stage represents
what happens in the ”Pointcloud to BEV” block in
Figure 1.
3.2 Loss Function
Faster R-CNN is a two-stage detector for which the
total loss is a combination of the losses of the individ-
ual stages. The losses of the first stage are similar to
the original Faster R-CNN paper, but do not have the
logarithmic scaling factors. There are regression tar-
gets that describe the absolute difference between the
ground truth and the network prediction for the center
points (x, y) and the dimensions (h, w) of the object:
∆x
c
= x
c
− x
ct
(1)
∆y
c
= y
c
− y
ct
(2)
∆h = h − h
t
(3)
∆w = w − w
t
(4)
where x
c
,y
c
,h, w are predictions from the network
and x
ct
,y
ct
,h
t
,w
t
are the ground truth targets which
the network aims to predict. The classification loss is
a softmax cross-entropy between the background and
foreground classes. Together they form the RPN loss.
The horizontal branch of the head network uses
the exact same regression targets, but should now con-
sider multiple, instead of just background and fore-
ground classes. In this research, only the car class is
considered so it turns out to be the same as for the
RPN case. The rotational branch of the head network
has an additional regression loss for the rotation as
show in Figure 1. This loss is the absolute difference
between the predicted and ground truth angle in de-
grees:
∆θ = θ − θ
t
(5)
3D Object Detection from LiDAR Data using Distance Dependent Feature Extraction
293

It is important to note that by introducing rotation
it becomes possible to describe the exact same rotated
bounding box in multiple ways. Consider a bound-
ing box defined by x
c
, y
c
, h, w, and θ. If the values
of h and w are swapped and 90 degrees are added to
the angle θ, the same bounding box can be described.
This has to be avoided since a loss larger than zero
would be possible, even though the predict bounding
box fits perfectly. This is avoided by making sure that
the width is always larger than the height. If this is
not the case the height and width are swapped and
90 degrees are added to the rotation to force unique
bounding box configurations.
Once all regression targets are calculated smooth
L1 loss is used according to the following equation:
L1(x) =
(
0.5x
2
σ if |x| <
0.5
σ
|x| −
0.5
σ
otherwise
(6)
where σ is a tuning hyperparameter, σ = 3 for the
RPN network and σ = 1 for the head network are
used, which is in line with Faster R-CNN implemen-
tation (Ren et al., 2015).
Combining the classification and regression losses
for all branches results in six total losses. A classifi-
cation and regression loss for the RPN, horizontal and
rotational branch. All losses use smooth L1 loss to
calculate the total loss value according to the follow-
ing equation:
Loss = L
rpn,reg
+ L
rpn,class
+ L
head
h
,reg
+ L
head
h
,class
+ L
head
r
,reg
+ L
head
r
,class
(7)
where L
rpn,reg
is the regression loss of the RPN,
L
rpn,class
is the classification loss of the RPN,
L
head
h
,reg
is the regression loss of the horizontal head
network, L
head
h
,class
is the classification loss of the
horizontal head network, L
head
r
,reg
is the regression
loss of the rotational head network and L
head
r
,class
is
the classification loss of the rotational head network.
3.3 The Difference of LiDAR Data
The density and distance between points change over
distance in the point clouds. Deep learning architec-
tures are often designed with images in mind where
this is not the case. The section shows how features
change in the LiDAR data and how the network archi-
tecture can be adjusted to account for this.
3.3.1 LiDAR Features
An important reason why convolutional neural net-
works are able to work well with relatively few pa-
rameters compared to classic neural networks, is be-
cause of parameter sharing. It leverages the idea that
Figure 4: BEV representation of two cars in the same KITTI
frame. The left car is located at 20 meters from the LiDAR
and the right car is located 53 meters from the LiDAR. It can
be seen that the amount of points decreases over distance
and gaps start appearing between adjacent pixels.
important features are the same across the whole im-
age and a single filter can be used at every position
(Goodfellow et al., 2016). This is a valid assump-
tion for rectilinear images but not for LiDAR data.
The representation of an object is different 5m from
the sensor compared to 20m from the sensor. The
amount of points reduces and the distance between
different points increases. Figure 3 shows how the
representation of a car changes over distance. The
amount of points drastically decreases, for an object
of the same class and similar size, while the distance
between points increases.
The sparsity and divergence of the beams over
time can also be observed in BEV images. Figure 4
shows the gaps that appear in the side of a car. This
is not because there is not part of the car at that pixel
but because the beams have diverged so far that it is
simply not possible to cover all pixels with the beams.
The farther away from the LiDAR, the larger the gaps.
Note that these gaps in longitudinal and lateral dimen-
sion are much smaller compared to the divergence in
the height dimension. The rapid divergence in the
height dimension makes it difficult to detect objects
that only cover a small area such as pedestrians. The
green arrow in Figure 3 represents the height dimen-
sion and shows a bigger distance than the red arrow
which relates to the longitudinal and lateral dimen-
sions. This is confirmed by looking at the specifica-
tions of the LiDAR used for the KITTI dataset, which
state that the angular resolution in longitudinal and
lateral range is 0.09 degrees and the vertical reso-
lution is 0.4 degrees (LiDAR, ). The fourth car in
Figure 3 is barely distinguishable at a distance of 43
meters. The BEV range is 70 by 70 meters so con-
sidering that range, 43 meters is not even near the
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
294
edge of where cars should be detected for the KITTI
evaluation. The difficulties for far-away objects in the
KITTI dataset were quite recently addressed by Wang
et al. (Wang et al., 2019). They used adaptive lay-
ers to enhance the performance on distant objects and
were able to improve SECOND (Yan et al., 2018) and
VoxelNet (Zhou and Tuzel, 2017) with roughly 1.5%
average precision for easy, moderate and hard cate-
gories. While the idea here is similar, our work does
not need an adversarial approach.
3.3.2 Combined Network
With the knowledge that features are not consistent
over the range of the point cloud, the network can be
adjusted accordingly. Multiple instances of the base-
line network are used and trained on different subsets
of the training data. The first network is only trained
on the objects that are close by, while an identical
second network is trained on objects far away. The
results of the separate regions are combined and then
compared to a baseline network that is trained on the
full range. To decide if objects should fall in the cate-
gory ”close by” or ”far away” a distance threshold has
to be established. From figure 5 it can be seen that a
radial distance from the LiDAR sensor is used.
For the inside range, the point cloud is converted
to a BEV image in the same manner as before, but
now all the pixel values outside this threshold range
are set to zero. This is done similarly for the outside
range but the inside set of pixels is set to zero as dis-
played in Figure 5. The point cloud is converted to
two BEV images. Each one contains part of the point
cloud and part of the objects. If the distance to the
center of an object is smaller than the threshold range
it belongs to the inside network and if it is larger it
belongs to the outside network.
When objects are excluded based on their center,
it could happen that objects are partially cut out of
the image and fed to the network. This should not
occur since it will devalue the training data. To avoid
this, an overlap region is introduced. This region is of
the point cloud is used both for the inside and outside
range networks.
4 IMPLEMENTATION DETAILS
4.1 Network Settings
All tests are done on a Faster R-CNN network with
a rotational branch inspired by (Xue, 2018). A learn-
ing rate of 0.0003 with decay steps at 190k and 230k
with a decay factor of 3 for both steps is applied. The
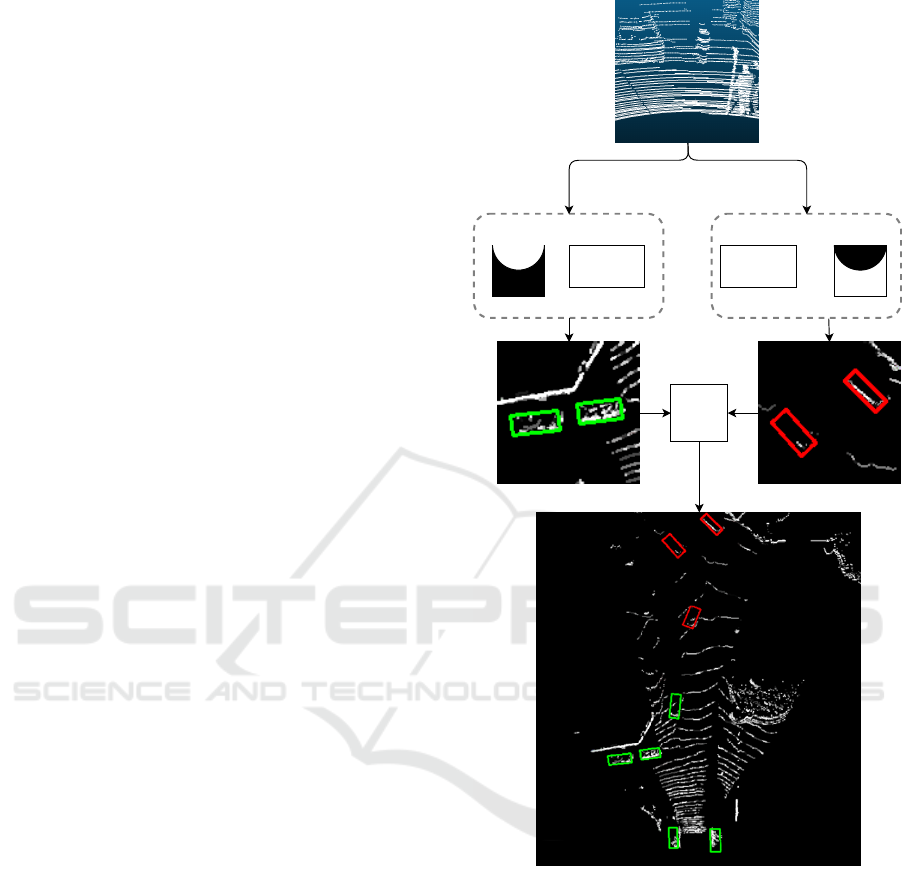
Inside range
network
Outside range
network
Combine
outputs
Figure 5: Pipeline of the combined network architecture.
Inside and outside range network only consider the white
part of the visualized range next to them. These networks
have the exact same configuration and are in line with Fig-
ure 1. The outputs of both networks are combined to form
the final output.
dataset, which contains 7481 samples, is split in train-
ing, validation and testing in a 50/25/25 fashion. For
all networks, multiple checkpoints were evaluated and
the one with the best score on the validation set was
picked. The best scores occurred often between 200k
and 250k steps which means that the network were
trained for roughly 50 to 60 epochs. All networks are
trained on a single Nvidia Tesla V100 GPU. Anchors
of 45 × 20 pixels are used to detect cars which is in
line with the average car size.
3D Object Detection from LiDAR Data using Distance Dependent Feature Extraction
295

The network is optimized using stochastic gradi-
ent descent with momentum of 0.9. Weight decay
of 0.0001 is used to prevent overfitting. All weights
of the ResNet backbone are pre-trained on ImageNet
(Deng et al., 2009). The underlying data is quite
different from the LiDAR data but we observed fast
convergence for the network. A batch size of 1 is
used with batch normalization applied with a decay
factor of 0.997. Batch normalization is applied but
not trained, the values from the pre-trained ImageNet
weights are used for the batch normalization layer.
Smooth L1 loss is used with thresholds of 3 and 1
for the RPN and head network respectively. The loss
weights for the different components are found em-
pirically. It is important to note that only one class
is considered during training, which makes classifi-
cation easier. Most errors occurred in the box calcu-
lation so the regression loss is twice as high as the
classification loss for both RPN and head network
branches.
4.2 Data Pre-processing
Point clouds are converted to one of the four config-
urations described in the Methods section, displayed
in Figure 2. Every pixel corresponds to 0.1 × 0.1 me-
ter space in the point cloud. All tests are done on the
KITTI dataset where only the field of view (FOV) of
the front camera is annotated. All pixel values out-
side this FOV are set to zero which results in a region
of black pixels. Some objects that lay on the border
are sometimes still annotated. To generalize this sit-
uation for all images, only objects that are annotated
and have at least 50% of the surface in the FOV are
taken into account. No augmentations are used for the
final models because they did not improve the perfor-
mance of the network.
4.3 Combined Network
The combined network uses the exact same settings
described in the previous sections, but applied to dif-
ferent range. One network is trained on data close to
the LiDAR while the another network is trained on
data far away from the LiDAR. The final output is
their combined output for the respective regions. For
the inside range network only boxes with the center
closer than 25m to the LiDAR are taken into account.
With a 5m overlap region between 25m and 30m, to
make sure no labeled objects are cut in half. For the
network that trains on objects that are far away, a 30m
boundary is used where the 25 − 30m region is the
overlap region mentioned before. Figure 5 shows how
the images are combined. The choice of the threshold
Table 2: Results of different input feature configurations.
Features Easy Moderate Hard
max height 79.5 73.1 66.6
height, intensity, density 79.2 73.1 67.0
binary 79.4 72.9 66.4
multichannel height vox. 76.0 65.8 65.0
for a particular dataset affects the results of the net-
work. We found that 25m was a good threshold since
both regions still contain enough training samples.
For inference a more straight forward division is
used. The KITTI evaluation considers a range of
[−35m, 35m] laterally and [0m, 70m] longitudinally.
We simply divided this region in half to get a close
by and far away range where we evaluate the baseline
and combined network on. All objects in the top half
of the image bounded by [−35m, 35m] laterally and
[0m, 35m] longitudinally will be detected by the in-
side network. The outside network detects objects in
a space bounded by [−35m, 35m] laterally and [35m,
70m]. The results of both networks are then merged
together. The full pipeline is displayed in Figure 5.
5 RESULTS
All results are based on the KITTI benchmark which
calculates average precision (AP) scores for three
different categories, respectively easy, moderate and
hard. AP is an often used object detection metric. In
KITTI, 41 equally spaced recall points are used where
the precision at each point is calculated. Precision is
evaluated at different recall points and combined ac-
cording to the following equation:
AP
kitti
=
1
41
Z
1
0
p(r)dr (8)
where r is a set of 41 values linearly spaced be-
tween [0, 1] where each value is a specific recall value.
The integral of all recall values divided by 41 is the
AP score.
Different true positive thresholds are considered.
The official KITTI has a 70% intersection over union
(IoU) threshold for the car class but we also report
scores for 50% overlap as many other works analyse.
70% percent is quite challenging to achieve with ro-
tational bounding boxes around objects that are often
occluded or contain few points.
5.1 Feature Analysis
Multiple different input features and their impact on
results are tested next. In the methods section, the
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
296

Table 3: Baseline network compared to the combined network for 50% and 70% IoU threshold. The average precision for the
0-70 meter range is the weighted mean average precision of the 0-35 range and the 35-70 range. The reason for this is that the
confidence scores of the combined network do not match. The confidence scores of the objects far away are too high because
that network has never seen objects close by. This difference in confidence score between the two networks influences the AP
calculations, so a mean average precision of the two ranges is used.
0-35m range 35-70m range 0-70m range
Method (Threshold) Easy Moderate Hard Easy Moderate Hard Easy Moderate Hard
Baseline (0.7) 78.8 82.0 75.4 - 43.7 37.0 78.5 73.0 66.9
Combined Network (0.7) 81.5 83.4 76.5 - 46.5 42.0 81.2 74.7 68.9
Difference 2.7 1.4 1.1 - 2.8 5.0 2.7 1.7 2.0
Baseline (0.5) 89.3 89.7 89.2 - 60.9 53.0 89.0 82.9 81.2
Combined Network (0.5) 89.8 89.9 89.5 - 75.1 67.7 89.5 86.4 84.7
Difference 0.5 0.2 0.3 - 14.2 14.7 0.5 3.5 3.5
considered four different input configurations are ex-
plained. Table 2 shows the results on the KITTI
benchmark for the different pre-processing meth-
ods displayed in Figure 2. It can be seen that the
first three methods, maximum heights, binary and
height/intensity/density only differ by a small mar-
gin. Only the approach where 9 channels are used
performs significantly worse.
Overall the networks seem to learn more the struc-
ture of the objects and not the absolute values stored
in the channels. This does not come as a complete
surprise since a ResNet feature extractor with batch
normalization is used. The information of the abso-
lute values is ”lost” quite quickly in the network be-
cause of the normalization. The filters in the first lay-
ers search more for derivative-based features such as
edges and corners. From that perspective, the differ-
ences are not so big. With that being said, the input
values are still important for the performance of the
network. Solely using intensity has a much worse
performance than only using the max height value
(Beltr
´
an et al., 2018). Another factor could be the pre-
trained weights. That allows for fast training results
but may limit the overall performance of the network.
This could be a problem especially for the network
with nine channel inputs.
These results highlight a limitation of 2D detec-
tors processing on point clouds and a possible reason
for the gap between them and methods directly us-
ing the point cloud. For LiDAR data these absolute
values are of big importance, since they can give in-
formation about classes directly. An object is very
unlikely to be a car if the highest values are only 1
meter high even though the top view almost perfectly
corresponds. It is possible that methods that use the
point cloud directly are able to leverage this infor-
mation more than 2D detectors. These networks also
use batch normalization but are able to compute more
complete features that help boost their scores. Rely-
ing too heavily on these input values could be danger-
ous when considering different classes, noise, sensor
movement, etc. With the rise of new datasets, it will
hopefully become clear how robust these methods are.
5.2 Range Analysis
Table 3 shows the results of the baseline network and
the combined network on a 70% IoU threshold and a
50% threshold. Easy category is not considered for
35-70m range analysis, due to the lack of significant
amount of cars. The combined network outperforms
the baseline network for all categories. The inside and
outside networks are trained on subsets of the total
data and are still able to perform better than the base-
line network. Not sharing the weights results in a bet-
ter performing network, because objects in different
ranges do not have to share the same feature extrac-
tors.
The results of 50% IoU compared to the ones with
70% show that even if the networks are able to detect
the cars, in many cases the precision of the bound-
ing boxes hurts the results significantly. Cars that are
closer to the LiDAR contain more points and regress-
ing their boxes is easier in these situations. If only a
50% threshold is used, the evaluation is more forgiv-
ing for errors in rotation because they have the largest
influence on the overlap. For the 35-70m range the
improvements of the combined network are remark-
able. It seems that the difference in features over the
distance hurts the ability to detect objects, when the
model is trained with full range data. The same hap-
pens with the ability to detect the orientation of the
objects accurately. In automated driving this is impor-
tant since the orientation is key for further processing
steps such as estimating heading angles and applying
tracking.
Figure 6 shows qualitative results of the combined
network. The green boxes are from the inside network
and the red boxes from the outside network. The BEV
image is adjusted for better visualization by smooth-
3D Object Detection from LiDAR Data using Distance Dependent Feature Extraction
297

Figure 6: Detection results on KITTI validation set. The upper row in each image is the BEV representation with the detected
cars. The other are the camera images corresponding to those BEVs. Green boxes are estimated by the inside network and
red boxes by the outside network.
ing the images and maximizing the input values. In
the left image, it can be appreciated that the closest
bounding box to the LiDAR is a correct detection, al-
though almost all of the pixels that represent the car
are black. The algorithm is able to detect it correctly
based on the small corner that is still present. The
right figure shows how the network performs all over
the range.
6 DISCUSSION
A 3D object detection algorithm is implemented and
trained on the KITTI dataset, that outperforms many
recent BEV based networks (Simon et al., 2019;
Beltr
´
an et al., 2018; Meyer et al., 2019) and gets simi-
lar results to other networks (Yang et al., 2019a; Chen
et al., 2017). This paper shows how convolutional
neural networks used for natural images are based on
assumptions that do not transfer well to point cloud
data. This concept can be used to increase the perfor-
mance of many networks on the KITTI benchmark
whether they are processing BEV images or point
clouds directly as was also shown by (Wang et al.,
2019). Furthermore it looks into the advantages and
limitations of BEV approaches. The main advantage
is robustness since it does not rely on the specific val-
ues of the object, but mostly on the shape. This could
also be thought as a limitation since these specific val-
ues could be directly used for classification in LiDAR
data. However, these values can vary between LiDAR
models and are more sensitive to possible noise. Data
quantity that needs to be processed is another thing to
take into account, as only an image needs to be pro-
cessed instead of an entire point cloud.
7 CONCLUSIONS
This work provides insights in how LiDAR data dif-
fers from natural images, which features are impor-
tant for detecting cars and how a neural network ar-
chitecture for 3D object detection can be adjusted to
take into account the changing object features over the
distance. The first tests check the effect of different
handcrafted input features on the performance. Point
clouds are converted to BEV images that are fed to a
two stage detector. Different input configurations do
not vary much in performance which can be attributed
to the fact that the filters look for features such as
edges and do not rely as much on the exact values
in the BEV. These exact values are of more relevance
for LiDAR data compared to camera images because
they can be linked directly to certain classes. This
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
298

is different from approaches that use the raw point
clouds directly as input and might explain why they
perform overall better on the KITTI benchmark. Nev-
ertheless, relying on those values may be a problem
when dealing with sensor noise or model differences.
With the rise of new datasets, it will hopefully become
clear how robust these methods are compared to BEV
based approaches.
In addition, this work visualizes how the distance
to the sensor influences the objects representation in
the point cloud. Most convolutional neural network
rely on the assumption that features are consistent
over the full range of the image. This allows for one
filter to be used to extract features from the entire fea-
ture map. For LiDAR data this is not the case which
is shown by analyzing point clouds and objects at var-
ious distances. This observation is used to change the
detection pipeline and have a separate detector for ob-
jects in the 0-35 meter range and another detector for
objects in the 35-70 meter range. These changes lead
to improvements, most notably of 2.7% AP on the 0-
35 meter range for easy category and 5.0% AP on the
35-70 meter range for hard category, using a 70% IoU
threshold.
REFERENCES
Beltr
´
an, J., Guindel, C., Moreno, F. M., Cruzado, D.,
Garc
´
ıa, F., and de la Escalera, A. (2018). Birdnet: a
3d object detection framework from lidar information.
CoRR, abs/1805.01195.
Caesar, H., Bankiti, V., Lang, A. H., Vora, S., Li-
ong, V. E., Xu, Q., Krishnan, A., Pan, Y., Baldan,
G., and Beijbom, O. (2019). nuscenes: A multi-
modal dataset for autonomous driving. arXiv preprint
arXiv:1903.11027.
Chen, X., Ma, H., Wan, J., Li, B., and Xia, T. (2017). Multi-
view 3d object detection network for autonomous
driving. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
1907–1915.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). ImageNet: A Large-Scale Hierarchical
Image Database. In CVPR09.
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013).
Vision meets robotics: The kitti dataset. International
Journal of Robotics Research (IJRR).
Goodfellow, I., Bengio, Y., and Courville, A. (2016). Deep
Learning. The MIT Press.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Deep
residual learning for image recognition. CoRR,
abs/1512.03385.
Jiang, Y., Zhu, X., Wang, X., Yang, S., Li, W., Wang, H.,
Fu, P., and Luo, Z. (2017). R2CNN: rotational re-
gion CNN for orientation robust scene text detection.
CoRR, abs/1706.09579.
Ku, J., Mozifian, M., Lee, J., Harakeh, A., and Waslander,
S. (2018). Joint 3d proposal generation and object de-
tection from view aggregation. IROS.
Lang, A. H., Vora, S., Caesar, H., Zhou, L., Yang, J.,
and Beijbom, O. (2018). Pointpillars: Fast en-
coders for object detection from point clouds. CoRR,
abs/1812.05784.
Liang, M., Yang, B., Chen, Y., Hu, R., and Urtasun, R.
(2019). Multi-task multi-sensor fusion for 3d object
detection. In The IEEE Conference on Computer Vi-
sion and Pattern Recognition (CVPR).
LiDAR, V. Hdl-64 users manual.
Lin, T., Doll
´
ar, P., Girshick, R. B., He, K., Hariharan, B.,
and Belongie, S. J. (2016). Feature pyramid networks
for object detection. CoRR, abs/1612.03144.
Luo, W., Yang, B., and Urtasun, R. (2018). Fast and furious:
Real time end-to-end 3d detection, tracking and mo-
tion forecasting with a single convolutional net. 2018
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 3569–3577.
Meyer, G. P., Laddha, A., Kee, E., Vallespi-Gonzalez, C.,
and Wellington, C. K. (2019). Lasernet: An efficient
probabilistic 3d object detector for autonomous driv-
ing. CoRR, abs/1903.08701.
Patil, A., Malla, S., Gang, H., and Chen, Y. (2019). The
H3D dataset for full-surround 3d multi-object detec-
tion and tracking in crowded urban scenes. CoRR,
abs/1903.01568.
Qi, C. R., Liu, W., Wu, C., Su, H., and Guibas, L. J. (2017).
Frustum pointnets for 3d object detection from RGB-
D data. CoRR, abs/1711.08488.
Qi, C. R., Su, H., Mo, K., and Guibas, L. J. (2016). Pointnet:
Deep learning on point sets for 3d classification and
segmentation. CoRR, abs/1612.00593.
Redmon, J., Divvala, S. K., Girshick, R. B., and Farhadi, A.
(2015). You only look once: Unified, real-time object
detection. CoRR, abs/1506.02640.
Ren, S., He, K., Girshick, R. B., and Sun, J. (2015). Faster
R-CNN: towards real-time object detection with re-
gion proposal networks. CoRR, abs/1506.01497.
Shi, S., Wang, X., and Li, H. (2018). Pointrcnn: 3d object
proposal generation and detection from point cloud.
CoRR, abs/1812.04244.
Shi, S., Wang, Z., Wang, X., and Li, H. (2019). Part-aˆ
2 net: 3d part-aware and aggregation neural network
for object detection from point cloud. arXiv preprint
arXiv:1907.03670.
Simon, M., Amende, K., Kraus, A., Honer, J., S
¨
amann,
T., Kaulbersch, H., Milz, S., and Gross, H.
(2019). Complexer-yolo: Real-time 3d object detec-
tion and tracking on semantic point clouds. CoRR,
abs/1904.07537.
Wang, Y., Chao, W., Garg, D., Hariharan, B., Campbell,
M., and Weinberger, K. Q. (2018). Pseudo-lidar
from visual depth estimation: Bridging the gap in
3d object detection for autonomous driving. CoRR,
abs/1812.07179.
Wang, Z., Ding, S., Li, Y., Zhao, M., Roychowdhury, S.,
Wallin, A., Sapiro, G., and Qiu, Q. (2019). Range
adaptation for 3d object detection in lidar.
3D Object Detection from LiDAR Data using Distance Dependent Feature Extraction
299

Weng, X. and Kitani, K. (2019). A baseline for 3d multi-
object tracking. CoRR, abs/1907.03961.
Xue, Y. (2018). Faster r2cnn.
Yan, Y., Mao, Y., and Li, B. (2018). Second: Sparsely em-
bedded convolutional detection. Sensors, 18:3337.
Yang, B., Liang, M., and Urtasun, R. (2018a). Hdnet: Ex-
ploiting hd maps for 3d object detection. In CoRL.
Yang, B., Luo, W., and Urtasun, R. (2019a). PIXOR: real-
time 3d object detection from point clouds. CoRR,
abs/1902.06326.
Yang, X., Fu, K., Sun, H., Yang, J., Guo, Z., Yan, M.,
Zhang, T., and Sun, X. (2018b). R2CNN++: multi-
dimensional attention based rotation invariant detector
with robust anchor strategy. CoRR, abs/1811.07126.
Yang, Z., Sun, Y., Liu, S., Shen, X., and Jia, J. (2018c).
Ipod: Intensive point-based object detector for point
cloud. arXiv preprint arXiv:1812.05276.
Yang, Z., Sun, Y., Liu, S., Shen, X., and Jia, J. (2019b). Std:
Sparse-to-dense 3d object detector for point cloud. In
Proceedings of the IEEE International Conference on
Computer Vision, pages 1951–1960.
Zeiler, M. D. and Fergus, R. (2013). Visualizing
and understanding convolutional networks. CoRR,
abs/1311.2901.
Zhou, Y. and Tuzel, O. (2017). Voxelnet: End-to-end learn-
ing for point cloud based 3d object detection. CoRR,
abs/1711.06396.
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
300
