
Detection and Recognition of Arrow Traffic Signals using a Two-stage
Neural Network Structure
Tien-Wen Yeh
1
and Huei-Yung Lin
2
1
Department of Electrical Engineering, National Chung Cheng University, Chiayi 621, Taiwan
2
Department of Electrical Engineering and Advanced Institute of Manufacturing with High-tech Innovations
National Chung Cheng University, Chiayi 621, Taiwan
Keywords:
Traffic Light Detection, Traffic Light Recognition, Arrow Traffic Signal.
Abstract:
This paper develops a traffic light detection and recognition system based on convolutional neural networks for
Taiwan road scenes. A two-stage approach is proposed with first detecting the traffic light position, followed
by the light state recognition. It is specifically designed to identify the challenging arrow signal lights in many
urban traffic scenes. In the detection stage, the map information and two cameras with different focal lengths
are used to detect the traffic lights at different distances. In the recognition stage, a new method combining
object detection and classification is proposed to deal with various light state classes in Taiwan road scenes.
Furthermore, an end-to-end network with shared feature maps is implemented to reduce the computation time.
Experiments are carried out on the public LISA dataset and our own dataset collected from two routes with
urban traffic scenes.
1 INTRODUCTION
At present, the advanced driver assistance sys-
tems (ADAS) or autonomous driving vehicles have
achieved fairly good results in simple environments
such as highways and closed parks. To further im-
prove the autonomous driving capability, dealing with
more complex scenarios including the urban roads
need to be addressed. In these cases, it is required to
have the ability to sense the traffic conditions. One of
the important issues is to detect the traffic lights and
understand their states for driving instructions. Al-
though the vehicle positioning by GPS combined with
GIS mapping can provide the rough road junction in-
formation, the exact locations and states of the traffic
lights are not guaranteed to be precisely marked in the
HD maps. Thus, online detection and recognition of
traffic signals are essential for driving assistance or
autonomous vehicles.
Traffic light detection approaches are mainly di-
vided into two categories. One is to make traffic lights
have the capability to communicate with nearby vehi-
cles through the V2I (Vehicle-to-Infrastructure) com-
munication framework (Abboud et al., 2016). The
other is to detect the positions and light states of the
traffic lights by the onboard sensors of the vehicles.
In general, these two approaches have both pros and
cons. However, the former requires the installation
and replacement of basic equipment and infrastruc-
ture, which is usually more expensive compared to
the sensing based methods adopted by individual ve-
hicles.
The traffic light detection and recognition tech-
niques using the onboard sensors of vehicles have
been investigated for many years (Jensen et al., 2016).
Early methods mainly apply computer vision and im-
age processing algorithms to the videos captured by
the in-vehicle camera. In recent years, the learning
based approaches have become more popular because
of the public availability of the large collection of
driving data (Waymo, 2019; Caesar et al., 2019; Ra-
manishka et al., 2018). However, the detection accu-
racy is still not satisfactory due to many disturbance
factors in the outdoor environment. A few issues for
the image-based traffic light detection methods are as
followings.
• Images with hue shift and halo interference due to
other light sources.
• (Partial) occlusion due to other objects or oblique
viewing angles.
• Incomplete light shape due to sensing malfunc-
tion.
• False positives from reflection, billboard, pedes-
322
Yeh, T. and Lin, H.
Detection and Recognition of Arrow Traffic Signals using a Two-stage Neural Network Structure.
DOI: 10.5220/0009345203220330
In Proceedings of the 6th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2020), pages 322-330
ISBN: 978-989-758-419-0
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

trian crossing light, etc.
• Dark light state due to unsynchronized light duty
cycle and camera shutter.
These problems are difficult to solve by computer vi-
sion algorithms one by one. But with the success of
deep learning and the use of convolutional neural net-
works (CNN) for traffic light detection (Weber et al.,
2016), it is expected to have more powerful feature
extraction capability to deal with these issues.
In this work, we present a traffic light detection
system for Taiwan road scenes based on deep neu-
ral networks. There are two technical challenges in
our application scenarios. First, the public datasets
currently available contain traffic lights arranged ver-
tically, which are different from the horizontally ar-
ranged traffic lights we are dealing with. Second,
the arrow signals are very common in Taiwan’s traf-
fic scenes, but most existing works use classifiers to
recognize the circle lights only. These problems lead
to the solution of creating a self-collecting dataset.
Moreover, the data unbalance among multiple classes
due to the lack of sufficient arrow light images fur-
ther complicates the network training. Thus, a new
method by combining the object detector and clas-
sifier for light state recognition is proposed. This
two-stage approach first detects the light position, fol-
lowed by the classification on the types of the arrow
lights. Finally, the traffic light detection network is
integrated to an end-to-end model with feature maps
sharing. Experiments carried out on the public LISA
dataset and our dataset report better results compared
to the previous works.
2 RELATED WORK
2.1 Classical Traffic Light Detection
The early developments of image-based traffic light
detection are mostly based on conventional computer
vision techniques (Fregin et al., 2017a). The input
images are converted to different color spaces, and
various features such as color, shape, edge and gray-
level intensity are used for detection. In the later ma-
chine learning based approaches (Kim et al., 2011),
image features such as HoG or Harr-like operators
are adopted for SVM or AdaBoost classification tech-
niques. There also exist techniques using multiple
sensor inputs. Fregin et al. presented a method
to integrate the depth information obtained using a
stereo camera for traffic light detection (Fregin et al.,
2017b). Alternatively, M
¨
uller et al. presented a dual
camera system to increase the range of traffic light
detection with different focal length settings (M
¨
uller
et al., 2017). They used a long focal length camera to
detect the far away traffic lights, while a wide-angle
lens camera is adopted to detect the close by traffic
lights.
2.2 Traffic Light Detection using CNN
In the past few years, many techniques based on deep
neural networks have been proposed to predict the
positions of traffic lights. DeepTLR (Weber et al.,
2016) and HDTLR (Weber et al., 2018) proposed
by Weber et al. used convolutional neural networks
for the detection and classification of traffic lights.
Sermanet et al. presented an integrated framework,
OverFeat, for classification, localization and detec-
tion (Sermanet et al., 2014). They have shown that
the multi-scale and sliding window approach can be
efficiently implemented in a convolutional network
structure. Recently, general object detection networks
are successfully adopted and specifically modified for
traffic light detection. Behrendt et al. presented a
deep learning approach to deal with the traffic lights
using the YOLO framework (Behrendt et al., 2017;
Redmon et al., 2016). Since the traffic lights might
appear very small in some images, one common ap-
proach is to reduce the stride of the network architec-
tures to preserve the features. M
¨
uller and Dietmayer
adapted the single network SSD approach (Liu et al.,
2016) and emphasized on the small traffic light detec-
tion (M
¨
uller and Dietmayer, 2018). Bach et al. pre-
sented a unified traffic light recognition system which
is also capable of state classification (circle, straight,
left, right) based on the Faster R-CNN structure (Bach
et al., 2018; Ren et al., 2015).
For the traffic light recognition, recent approaches
are divided into two categories. One is to detect the
traffic light, crop the traffic light region, and send it
to a classifier for the light state recognition (Behrendt
et al., 2017). The other approach simultaneously de-
tect the traffic light position and recognize the light
state (M
¨
uller and Dietmayer, 2018; Bach et al., 2018).
When the object location is predicted with a confi-
dence and the bounding box, one more branch is used
to predict the light state. For general traffic light
recognition, except for the recognition of basic circu-
lar lights, it is also required to deal with various kinds
of arrow lights in many countries. In the existing lit-
erature, this issue is only covered by a limited number
of research (Weber et al., 2018; Bach et al., 2018). A
two-stage approach is usually adopted with first the
light color classification, followed by the arrow type
classification.
Detection and Recognition of Arrow Traffic Signals using a Two-stage Neural Network Structure
323

2.3 Map Assisted Traffic Light
Detection
One major drawback of image-based traffic light de-
tection is the false positives caused by the similar fea-
tures in the background. To reduce the incorrect de-
tection, a simple method is to restrict the ROI in the
image for traffic light search. Alternatively, the lo-
cation of the traffic light on the map or from other
input sources can also provide additional information
for more accurate detection. This intends to improve,
rather than replace the image-based methods. In this
map-based traffic light detection approach, the idea
is to utilize the fact that traffic lights are located at
fixed locations in normal conditions. GPS or LiDAR
are commonly used to establish the HD map and an-
notate the traffic light positions in the route (Fairfield
and Urmson, 2011; Hirabayashi et al., 2019). When
the vehicle is driving, the map and localization infor-
mation is used to calculate the traffic light appeared in
a small image region. Moreover, it can also provide
the verification about which traffic light to follow if
there exist more than one at a junction.
3 DATASET
Although several public datasets are available for traf-
fic light detection and evaluation, they are not suitable
for network training for Taiwan road scenes due to the
different appearance. In this work, we cooperate with
Industrial Technology Research Institute (ITRI) and
collect our own dataset for both network training and
performance evaluation.
Figure 1 shows the two commuter routes for data
collection. One route is from the ITRI campus to
Hsinchu High Speed Railway Station, and the other
is from National Chung Cheng University to Chiayi
High Speed Railway Station. These routes contain the
driving distances of 16 km and 39 km, and the record-
ing time of 40 minutes and 50 minutes, respectively.
Two cameras with the focal length of 3.5 mm and 12
mm are mounted below the rear view mirror of a ve-
hicle for image acquisition. The image sequences are
captured at 36 fps with the resolution of 2048 × 1536.
The LiDAR data are also recorded (by Velodyne Ul-
tra Puck VLP-32C) and used for the segmentation of
rough traffic light regions in the images.
The first route is recorded three times, and the
second route is recorded once. We sample 5 images
per second for processing, labeling the position of the
traffic light and the class of the light state. The labeled
data contain 26,868 image frames and 29,963 traffic
lights. Only the traffic lights with clear light states are
(a) Route 1: From ITRI to THSR Hsinchu station.
(b) Route 2: From CCU to THSR Chiayi station.
Figure 1: The routes for collecting data to create our own
dataset. Route 1 is from ITRI to THSR Hsinchu Station,
and Route 2 is from CCU to THSR Chiayi Station. The
distances are 16 km and 39 km, respectively.
labeled, and there are totally 14 classes of light state
combination in the dataset.
As shown in Figure 2, the traffic lights in LISA
dataset (Jensen et al., 2016) are arranged vertically,
which is very different from the ones arranged hori-
zontally in Taiwan. Furthermore, the available light
states are also different. Only a single light can be
displayed at a time in LISA dataset (see Figure 2(b)),
but there exist many combinations with various types
of arrow lights in the Taiwan road scenes (see Figure
2(d)). Figure 3 shows our dataset collected using the
cameras with 3.5 mm lens (in blue color) and 12 mm
lens (in orange color) in terms of the cropped traf-
fic light image size and the number of traffic lights in
different classes. The dataset contains much more cir-
cular lights, but only a limited number of arrow lights.
For the traffic light ROI size, LISA dataset mainly
consists of the image regions in the range of 15 – 30
pixels. In our dataset, the images captured with 3.5
mm and 12 mm lenses have the traffic light regions
in the ranges of 10 – 20 pixels and 15 – 50 pixels,
respectively.
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
324

(a) The traffic scene in LISA dataset.
(b) The traffic lights in LISA dataset.
(c) The images captured with our 3.5/12 mm lens cam-
eras.
(d) Examples of traffic lights collected in our dataset.
Figure 2: The traffic light images in the LISA dataset and
our dataset captured using the cameras with 3.5mm and
12mm lenses.
4 APPROACH
This work integrates the map information for traf-
fic light detection and recognition. We use the pre-
established HD map with the traffic light annotation
which contains ID, position, horizontal and vertical
angles. The position between the vehicle and traffic
lights can be determined by the LiDAR data and HD
map during driving. This information is used to crop
the image for a rough traffic light position. Due to
the characteristics of the LiDAR data and the regis-
tration with images, it is not possible to identify the
traffic lights accurately. The cropped ROI is then fed
to the neural networks for precise location detection
and light state recognition.
(a) Traffic light size vs. number.
(b) Traffic light class vs. number.
Figure 3: The statistics of our dataset in terms of the traffic
light size and class. The blue and orange colors indicate the
numbers from 3.5 mm and 12 mm lenses, respectively.
The proposed traffic light detection and recogni-
tion technique is a two-stage approach, with the first
stage for the traffic light detection and the second
stage for the light state recognition. In the first stage,
several popular object detection networks including
Faster R-CNN, SSD, YOLO have been tested. In
the traffic light detection application, the computa-
tion load is one of the major concerns. YOLOv3
(Redmon and Farhadi, 2018) provides the best ac-
curacy vs. processing time trade-off in the experi-
ments, and is adopted for our detection framework.
In the second stage, we propose a new method which
combines the object detection and classification. The
light states are detected by YOLOv3-tiny (Redmon
and Farhadi, 2018) and classified to four classes: Red-
Circle, YellowCircle, GreenCircle and Arrow, fol-
lowed by the classification of Arrows into LeftArrow,
StraightArrow and RightArrow using LeNet (LeCun
et al., 1998). As an example, if there is a Red-Left-
Right light state, YOLOv3-tiny will detect one Red-
Circle and two Arrows, and LeNet will recognize the
two Arrows as LeftArrow and RightArrow. The final
traffic light state is then provided by combining the
results of two networks.
This approach is expected to mitigate the unbal-
anced data problem. Furthermore, it is also flexible
in that detecting less common light states can be per-
formed with a slight modification to LeNet and pre-
diction classes.
Detection and Recognition of Arrow Traffic Signals using a Two-stage Neural Network Structure
325
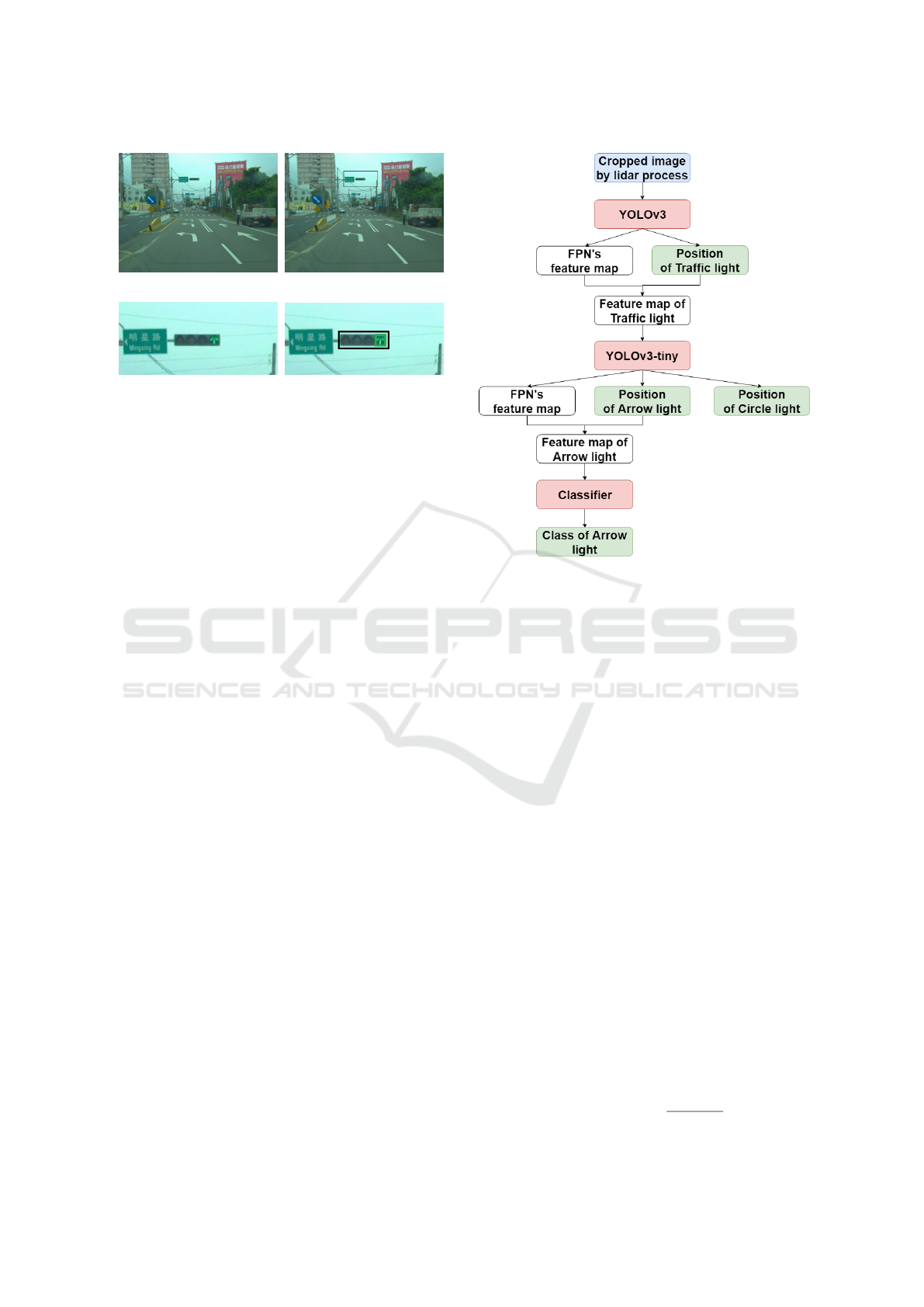
(a) Input image. (b) LiDAR processing result.
(c) The network input. (d) The network output.
Figure 4: The results of traffic light detection combining
image and LiDAR data in the experiments.
4.1 Detection Network
4.1.1 Network Architecture
The proposed detection and classification technique
consists of three cascaded network structures. It takes
more time to train and inference if all three networks
are independent. Thus, in the implementation, they
are integrated to a single end-to-end network with
shared feature maps. Better detection and classifica-
tion results are obtained, and the speed of network
training and inference is also improved. The unified
network architecture is shown in Figure 5. Because
the subnets share the same feature map, the architec-
ture of the second and third subnets have changed.
Feature extraction of the network is removed, which
leaves only the prediction part. The subnet inputs are
also changed from images to the feature maps coming
from the FPN of the previous subnet.
4.1.2 Loss Function and ROI
The loss of the unified network is the error summation
of the three subnets. It is expected that the network
can back-propagate based on the overall task error.
We use the original loss functions for YOLOv3 and
YOLOv3-tiny, and the cross entropy loss for LeNet.
The network training of the second and third subnets
is not based on the detection results of the previous
subnet, but directly from the groundtruth. This is
due to the initial training of each subnet is not good
enough to accurately identify the traffic lights or light
states. Only when inferencing for evaluation, the net-
work runs based on the detection results of the previ-
ous subnets.
Figure 5: The flowchart of the proposed network architec-
ture. The subnet inputs are the shared feature maps from the
FPN (feature pyramid network).
4.1.3 Training Image and Data Augmentation
Our detection network is based on the cropped im-
age, so the training data are also cropped to simulate
the LiDAR processing, as shown in Figure 6. Each
traffic light image is cropped 3 times, and the traf-
fic light positions are randomly shown in the cropped
image. The dataset mainly contains six classes: Red,
Yellow, Green, Straight and StraightRight. Thus, data
augmentation is carried out to generate more training
data by rotating the Arrow light images (see Figures
6(d) and 6(e)).
5 EXPERIMENTS
5.1 Evaluation Criteria
We adopt three indicators for the evaluation of ma-
chine learning models: precision, recall, and F1-
score.
• Precision: The ability to classify negative sam-
ples. If the precision is higher, the ability to clas-
sify negative samples is stronger, i.e.,
Precision =
T P
T P + FP
(1)
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
326
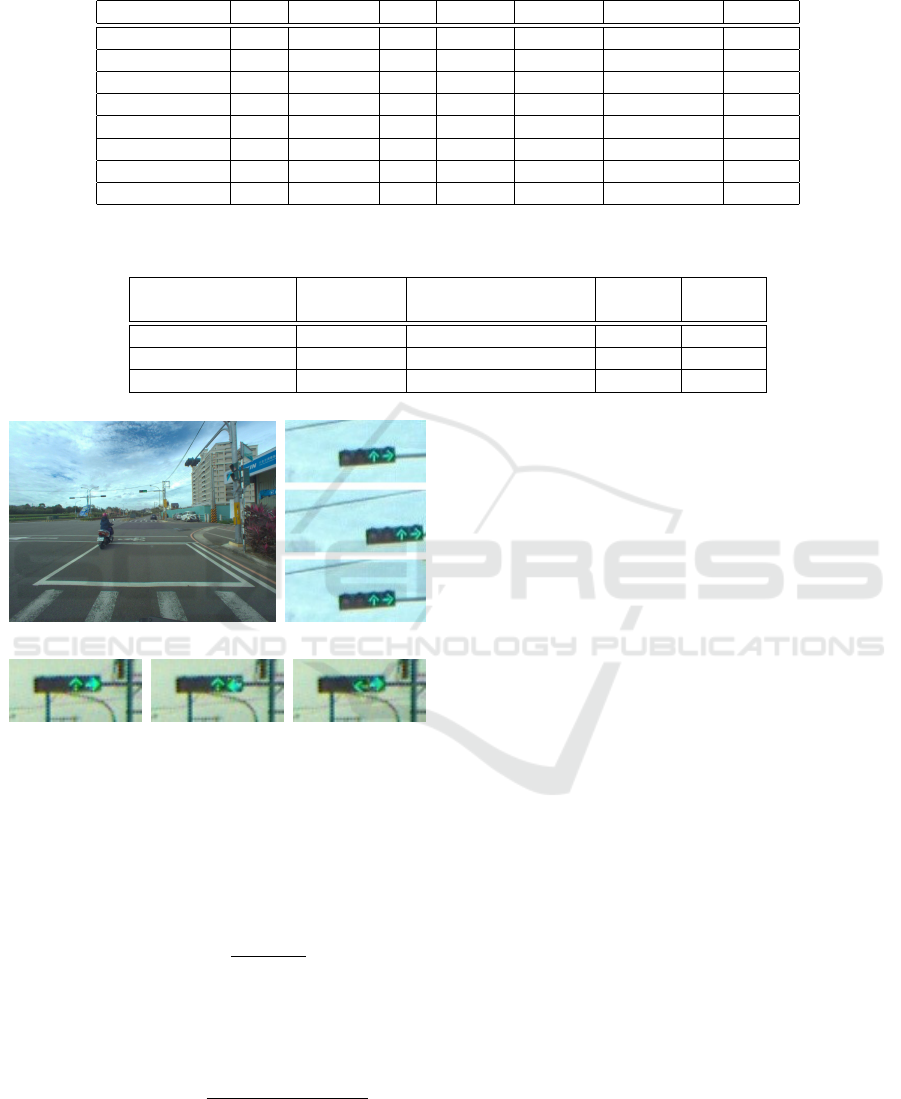
Table 1: The LISA daytime dataset test result (mAP using IoU 0.5). The results of columns 1, 2, 3 are from (Jensen et al.,
2016). The results of columns 4, 5, 6, 7 are from (Li et al., 2018).
Method Stop StopLeft Go GoLeft Warning WarningLeft All
Color detector 0.04
Spot detector 0.0004
ACF detector 0.36
Faster R-CNN 0.14 0.01 0.19 0.001 0.09
SLD 0.08 0.10 0.09
ACF 0.63 0.13 0.40 0.37 0.38
Multi-detector 0.72 0.28 0.52 0.40 0.48
Ours 0.70 0.40 0.88 0.71 0.52 0.24 0.66
Table 2: The results obtained using our dataset. Three network structures are compared and one with data augmentation. The
table shows the mAP and the computation time.
Network YOLOv3 + YOLOv3 + Unified Unified
AlexNet YOLOv3-tiny+LeNet network network
Data augmentation 7 7 7 3
mAP 0.36 0.55 0.57 0.67
Speed (ms) 31 52 40 40
(a) (b)
(c) (d) (e)
Figure 6: Examples of the training images. (a) Original
image, (b) cropped with LiDAR data, (c) training image,
(d) data augmented 1, (e) data augmented 2.
• Recall: The ability to classify positive samples. If
the recall is higher, the ability to classify positive
samples is stronger, i.e.,
Recall =
T P
T P + FN
(2)
• F1-Score: A combination of precision and recall.
If the F1-Score is higher, the classifier is more ro-
bust, i.e.,
F1 − Score =
2 · Precision · Recall
Precision + Recall
(3)
Two indicators are used to evaluate the object de-
tection results: the precision-recall curve (PR curve)
and the mean average precision (mAP).
• PR curve: Different thresholds have different pre-
cision and recall. The precision-recall curve is
given by drawing all the precision and recall. The
trend of this curve represents the quality of a clas-
sifier.
• AP (average precision): It represents the area un-
der the PR curve (AUC), which indicates the ro-
bustness of a classifier. If the area is larger, the
classifier is stronger.
• mAP: AP only represents one class, but the mod-
els often detect many classes. So mAP is used to
represent the average AP of all classes.
5.2 Training and Testing on LISA
Dataset
For the performance comparison with other tech-
niques, the LISA daytime dataset is used for training
and testing. As shown in Table 1, the conventional
detectors do not provide good results due to the com-
plex scenes in the dataset. The low accuracy results
obtained from Faster R-CNN are mainly due to the
small traffic light regions, and it is difficult to detect
after the layer-by-layer convolution (Li et al., 2018).
The proposed method has achieved the best results as
shown in the last row, which include the circular lights
and arrow lights.
5.3 Training and Testing on Our
Dataset
In Table 2, we compare the accuracy and compu-
tation speed of different network structures on our
Detection and Recognition of Arrow Traffic Signals using a Two-stage Neural Network Structure
327

(a) mAP vs. traffic light size (b) Traffic light size vs. distance. (c) mAP vs. distance.
Figure 7: The relationship among the mAP, the traffic light size in the image, and the distance of the traffic light in our dataset.
Table 3: The mAP of each stage of the network.
Detection State Type
Class Traffic Light Red Yellow Green Arrow Left Left Left
mAP 0.97 0.93 0.90 0.64 0.91 0.87 0.98 0.97
Table 4: The mAP for each class.
Class Close Red Yellow Green Left Straight Right
mAP 0.43 0.78 0.79 0.76 No data 0.55 No data
Class Red Red Straight Straight Left Red Straight
Left Right Left Right Right Left Left
Right Right
mAP 0.55 0.45 0.64 0.87 0.84 No data 0.69
dataset. The first one uses YOLOv3 to detect the traf-
fic lights and AlexNet (Krizhevsky et al., 2012) to
classify the light states. The second method is the
‘YOLOv3+YOLOv3-tiny+LeNet’ combination pro-
posed in this work, but with three independent net-
works. The last one is the unified network structure
containing the integration of the three subnets. All
networks are trained and tested on the same dataset.
As shown in the table, the mAPs of the proposed
methods are better than ‘YOLOv3+AlexNet’ at the
cost of more computation time. Comparing the first
two network structures, the one with LeNet for arrow
light classification has a better mAP but requires more
computation time. For the proposed methods, the uni-
fied network (the last two columns in the table) has
an improvement in mAP compared to the one without
integration (the second column in the table). Further-
more, the computation speed is also faster due to the
use of shared feature maps.
5.4 Comparison on Different Distance
The images taken from different distances contain the
traffic lights with different ROI sizes. This will appar-
ently affect the detection and recognition results. In
the experiments, the cameras with 3.5 mm and 12 mm
lenses are used for image acquisition. Figures 7(a),
7(b) and 7(c) show the mAP of different traffic light
ROI size (height in pixel), the size of traffic lights at
different distance, and the mAP of different distance,
respectively. In Figures 7(a) and 7(b), the traffic lights
taken by 12 mm lens are larger than taken by 3.5 mm
lens. It is reasonable that larger traffic lights provide
better detection results. Figure 7(c) shows the detec-
tion results for 12 mm lens are better than 3.5 mm for
all distances. However, the short focal lens camera
can still be used to cover the close range scenes. As
shown in Figures 7(b) and 7(c), the traffic lights at the
distance between 0 to 15 m can only be captured by
the 3.5 mm lens due to the field of view of the cam-
eras.
5.5 Detection Results in Each Stage
Our approach consists of three stages for traffic light
detection, initial light state classification, and arrow
type recognition. Table 3 shows the mAPs for each
stage with light state and arrow type classification.
The mAPs of the state and type are calculated based
on the detection from the previous subnet. It shows
that larger errors mainly appear in the second subnet,
and the mAP of the Green class is the lowest. This
is because the arrow light is similar to the green light
for a far away distance. Table 4 shows the mAPs of all
classes. The classes with sufficient training data have
higher mAPs as expected. However, for the classes
with insufficient samples, data augmentation is not
able to improve the accuracy for all classes.
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
328

6 CONCLUSION
This paper presents a traffic light detection and recog-
nition system based on convolutional neural networks
for Taiwan road scenes. A two-stage approach is pro-
posed with first detecting the traffic light position, fol-
lowed by the light state recognition. It is specifically
designed to handle the arrow signal lights. In the traf-
fic light detection stage, the map information is used
to facilitate the detection by restricting the ROI. Two
cameras with different focal lengths are used to cap-
ture the near and far scenes. In the recognition stage,
a method combining the object detection and clas-
sification is presented. It is used to cope with the
problem of multiple light state classes in many urban
traffic scenes. The proposed end-to-end unified net-
work with shared feature maps has greatly reduced
the training and inference computation. The experi-
ments carried out using LISA dataset and our dataset
have demonstrated the effectiveness of the proposed
technique.
ACKNOWLEDGMENTS
The support of this work in part by the Ministry
of Science and Technology of Taiwan under Grant
MOST 106-2221-E-194-004 and the Advanced In-
stitute of Manufacturing with High-tech Innovations
(AIM-HI) from The Featured Areas Research Cen-
ter Program within the framework of the Higher Ed-
ucation Sprout Project by the Ministry of Education
(MOE) in Taiwan is gratefully acknowledged.
REFERENCES
Abboud, K., Omar, H. A., and Zhuang, W. (2016). Inter-
working of dsrc and cellular network technologies for
v2x communications: A survey. IEEE Transactions
on Vehicular Technology, 65:9457–9470.
Bach, M., Stumper, D., and Dietmayer, K. C. J. (2018).
Deep convolutional traffic light recognition for auto-
mated driving. 2018 21st International Conference on
Intelligent Transportation Systems (ITSC), pages 851–
858.
Behrendt, K., Novak, L., and Botros, R. (2017). A deep
learning approach to traffic lights: Detection, track-
ing, and classification. 2017 IEEE International Con-
ference on Robotics and Automation (ICRA), pages
1370–1377.
Caesar, H., Bankiti, V., Lang, A. H., Vora, S., Li-
ong, V. E., Xu, Q., Krishnan, A., Pan, Y., Baldan,
G., and Beijbom, O. (2019). nuscenes: A multi-
modal dataset for autonomous driving. arXiv preprint
arXiv:1903.11027.
Fairfield, N. and Urmson, C. (2011). Traffic light mapping
and detection. 2011 IEEE International Conference
on Robotics and Automation, pages 5421–5426.
Fregin, A., M
¨
uller, J. M., and Dietmayer, K. C. J. (2017a).
Feature detectors for traffic light recognition. 2017
IEEE 20th International Conference on Intelligent
Transportation Systems (ITSC), pages 339–346.
Fregin, A., M
¨
uller, J. M., and Dietmayer, K. C. J. (2017b).
Three ways of using stereo vision for traffic light
recognition. 2017 IEEE Intelligent Vehicles Sympo-
sium (IV), pages 430–436.
Hirabayashi, M., Sujiwo, A., Monrroy, A., Kato, S., and
Edahiro, M. (2019). Traffic light recognition us-
ing high-definition map features. Robotics and Au-
tonomous Systems, 111:62–72.
Jensen, M. B., Philipsen, M. P., Møgelmose, A., Moeslund,
T. B., and Trivedi, M. M. (2016). Vision for look-
ing at traffic lights: Issues, survey, and perspectives.
IEEE Transactions on Intelligent Transportation Sys-
tems, 17:1800–1815.
Kim, H.-K., Park, J. H., and Jung, H.-Y. (2011). Effective
traffic lights recognition method for real time driving
assistance systemin the daytime.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. Commun. ACM, 60:84–90.
LeCun, Y., Bottou, L., Bengio, Y., Haffner, P., et al. (1998).
Gradient-based learning applied to document recogni-
tion. Proceedings of the IEEE, 86(11):2278–2324.
Li, X., Ma, H., Wang, X., and Zhang, X. (2018). Traffic
light recognition for complex scene with fusion detec-
tions. IEEE Transactions on Intelligent Transporta-
tion Systems, 19:199–208.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S. E.,
Fu, C.-Y., and Berg, A. C. (2016). Ssd: Single shot
multibox detector. In ECCV.
M
¨
uller, J. M. and Dietmayer, K. C. J. (2018). Detecting
traffic lights by single shot detection. 2018 21st In-
ternational Conference on Intelligent Transportation
Systems (ITSC), pages 266–273.
M
¨
uller, J. M., Fregin, A., and Dietmayer, K. C. J. (2017).
Multi-camera system for traffic light detection: About
camera setup and mapping of detections. 2017 IEEE
20th International Conference on Intelligent Trans-
portation Systems (ITSC), pages 165–172.
Ramanishka, V., Chen, Y.-T., Misu, T., and Saenko, K.
(2018). Toward driving scene understanding: A
dataset for learning driver behavior and causal reason-
ing. In Conference on Computer Vision and Pattern
Recognition.
Redmon, J., Divvala, S. K., Girshick, R. B., and Farhadi, A.
(2016). You only look once: Unified, real-time object
detection. 2016 IEEE Conference on Computer Vision
and Pattern Recognition (CVPR), pages 779–788.
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. CoRR, abs/1804.02767.
Ren, S., He, K., Girshick, R. B., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 39:1137–1149.
Detection and Recognition of Arrow Traffic Signals using a Two-stage Neural Network Structure
329

Sermanet, P., Eigen, D., Zhang, X., Mathieu, M., Fer-
gus, R., and LeCun, Y. (2014). Overfeat: Integrated
recognition, localization and detection using convolu-
tional networks. In Bengio, Y. and LeCun, Y., editors,
2nd International Conference on Learning Represen-
tations, ICLR 2014, Banff, AB, Canada, April 14-16,
2014, Conference Track Proceedings.
Waymo (2019). Waymo open dataset: An autonomous driv-
ing dataset.
Weber, M., Huber, M., and Z
¨
ollner, J. M. (2018). Hdtlr: A
cnn based hierarchical detector for traffic lights. 2018
21st International Conference on Intelligent Trans-
portation Systems (ITSC), pages 255–260.
Weber, M., Wolf, P., and Z
¨
ollner, J. M. (2016). Deeptlr: A
single deep convolutional network for detection and
classification of traffic lights. 2016 IEEE Intelligent
Vehicles Symposium (IV), pages 342–348.
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
330
