A Reinforcement Learning QoS Negotiation Model for IoT
Middleware
Itorobong S. Udoh and Gerald Kotonya
School of Computing and Communications, Lancaster University, Bailrigg, Lancaster, U.K.
Keywords: QoS, Internet of Things, Negotiation, IoT Services, Reinforcement Learning.
Abstract: A large number of heterogeneous and mobile devices interacting with each other, leading to the execution of
tasks with little human interference, characterizes the Internet of Things (IoT) ecosystem. This interaction
typically occurs in a service-oriented manner facilitated by an IoT middleware. The service provision
paradigm in the IoT dynamic environment requires a negotiation process to resolve Quality of Service (QoS)
contentions between heterogeneous devices with conflicting preferences. This paper proposes a negotiation
model that allows negotiating agents to dynamically adapt their strategies using a model-based reinforcement
learning as the QoS preferences evolve and the negotiation resources changes due to the changes in the
physical world. We use a simulated environment to illustrate the improvements that our proposed negotiation
model brings to the QoS negotiation process in a dynamic IoT environment.
1 INTRODUCTION
The IoT ecosystem emerges from a core of a
heterogeneous mix of several technologies. The
identification, sensing, communication and
middleware technologies form the fundamental
building blocks required to incorporate “intelligence”
into “things” (Patel and Patel, 2016). Several research
initiatives have structured these IoT enabling
technologies into n-layered technology architectures.
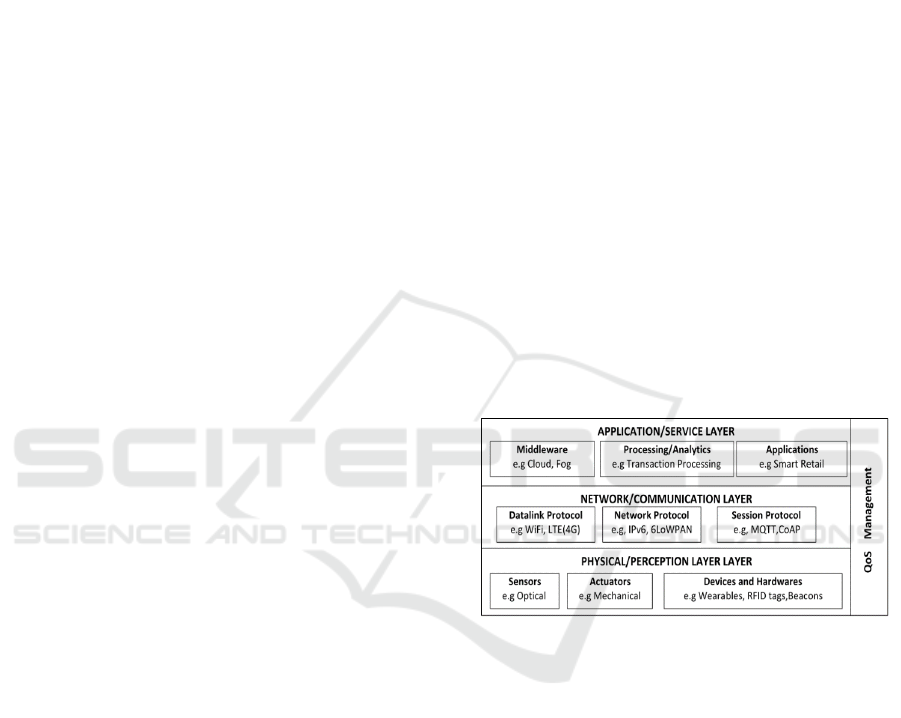
Most of the proposed technology architectural models
add more abstractions to the primary 3-layer
architecture, which consists of the
application/service, communication/network and
perception/physical layers as illustrated in Figure 1.
Alongside these layers, it is important to address
QoS management concerns to avoid situations that
may lead to serious problems especially in IoT
systems that are characterised by stringent QoS needs
such as embedded IoT medical devices and
autonomous vehicle control systems. Beyond these
are many IoT systems for which providing best-effort
QoS may not be adequate for the successful operation
of such systems.
Guaranteeing the QoS requirements demands that
all the layers in the IoT architecture provide both
effective and efficient QoS management strategies
(Duan, Chen and Xing, 2011). A recent survey by
Figure 1: The IoT technology layer.
White, Nallur and Clarke (2017) shows that the
current QoS research initiatives largely focuses on the
perception/physical and communication/network
layers in the IoT architecture with minimal attention
paid to the application/service layer. According to the
authors, the application/service layer accounts for
only 13 per cent of all the published works that
examine the QoS in IoT.
This paper focuses on the QoS in the
application/service layer. Given that the
functionalities of the interconnected devices in IoT
can be provided as a service, this layer provides the
framework that allows these devices to interact with
each other in a service-oriented manner (Thoma,
Meyer, Spenser, Meissner and Braun, 2012). The IoT
middleware, a key technology in this layer provides
both functional services (e.g service abstraction,
Udoh, I. and Kotonya, G.
A Reinforcement Learning QoS Negotiation Model for IoT Middleware.
DOI: 10.5220/0009350102050212
In Proceedings of the 5th International Conference on Internet of Things, Big Data and Security (IoTBDS 2020), pages 205-212
ISBN: 978-989-758-426-8
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
205

discovery, composition and semantic
interoperability) and non-functional support (e.g QoS
negotiation and monitoring) (Razzaque, Milojevic-
Jevric, Palade and Clarke, 2015).
QoS has been identified as a pivotal element that
must be considered in IoT middleware in order to
provide useful IoT services to end-user applications
and actuators in critical IoT infrastructures. As IoT
becomes increasingly dynamic, due to the changes in
the physical world, there have been growing concerns
about the best way to ensure QoS. As service
consumers with varied QoS requirements (e.g hard
QoS and soft QoS) interact with service providers
with different QoS policy-driven behaviours (e.g
energy conscious and resource-conscious), in a
dynamic environment (e.g high resources and low
resources), it is important to provide a mechanism
that allows service providers and consumers with
different QoS requirements and expectations to reach
a mutually agreeable QoS resolution.
This paper presents a QoS negotiation model that
uses reinforcement learning to reach a QoS agreement
in an IoT dynamic environment. Considering the
importance of QoS negotiation in IoT middleware,
this paper presents related works in Section II,
followed by the description of the negotiation
environment, main assumptions and components of
the QoS model. Section IV models the QoS
negotiation process and section V provides details of
the reinforcement learning-based QoS solution.
While Section VI describes the experimental setup
and the evaluation of the simulation results, section
VII summarizes the paper and discusses future
research directions.
2 RELATED WORKS
Negotiation is becoming an increasingly popular
mechanism in maintaining QoS in IoT. Current
negotiation approaches use software agents for the
formation of Service Level Agreement (SLA)
between service consumer and providers in IoT (Bala
and Chishti, 2017). SLA-based negotiation is an
important mechanism to manage the variety of
requirements that characterise the IoT environment.
Ghumman, Schill and Lassig (2016) designed a flip-
flop negotiation strategy using the concession
extrapolation and 3D utility for generation of SLA.
The proposed model is useful in applications where
time is a critical resource during negotiation as an
agreement is reached quickly. However, this
approach is characterised with a low social
welfare(the sum of the utility gained by each agent)
as each negotiating participant reduces their utility
until the contention is resolved. Zheng, Martin,
Brohman and Xu (2014) used game theory to resolve
QoS contention between IoT devices and
applications. This approach demonstrates a good
balance between success rate and social welfare.
However, it ignores the changes that may occur in the
negotiating environment as it only considers the
negotiating participant's action.
Alanezi and Mishra (2018) allowed negotiating
parties to define their privacy requirements. while this
QoS solution satisfies the privacy requirements of the
negotiating participants, it is difficult for the
negotiation model to be used in multi-parameter
scenarios. Li and Clarke (2019) designed a QoS
model that integrates a mixed negotiation strategy
with the WS-Agreement Negotiation protocol for IoT
service providers and consumers with intersected
negotiation space. The authors considered the
domain-specific properties of IoT services in their
approach. However, in a multi-attribute negotiation
scenario, the adopted negotiation model increases the
overhead time.
Several QoS negotiation mechanisms have been
proposed for web service-oriented systems such as
the works of Zulkerine and Martin (2011) and Al-
Aaidroos, Jailani and Mukhtar, (2011). However, due
to several differences between web services and IoT
services, web service negotiation methods may not
be able to address the idiosyncrasies of IoT. For
instance, resource-constrained and mobile devices
provide IoT services, while stationary data-centres
with immense computing capabilities usually host
traditional web services. Thus, QoS parameters in
web service systems are relatively stable and are not
affected by changes that might occur in the real
world, unlike the IoT ecosystem that is highly
dynamic and characterised with uncertainties.
Given the dynamism of the negotiating
environment of IoT, we proposed a QoS negotiation
model that uses reinforcement learning and software
agents to generate SLA. The idea of using
reinforcement learning for QoS negotiation has been
explored in the telecommunication domain. For
example, Pouyllau and Carofiglio (2013) used
reinforcement learning to find a QoS guaranteed path
in a network that satisfies the QoS requirements and
maximizes the long term goals. While their focus is
on a network federation environment, our approach is
directed towards the IoT middleware. Using
reinforcement learning, our approach allows agents to
learn how to negotiate by choosing the appropriate
negotiating strategy at each stage of the negotiation
process based on the changes observed in the
IoTBDS 2020 - 5th International Conference on Internet of Things, Big Data and Security
206

negotiation environment and the agent’s opponent
offer. This approach tends to lead to a negotiation
process in which an agreement is found before the
deadline and offers a better balance between success
rate and social welfare compared to other existing
approaches.
3 QoS NEGOTIATION IN IoT
MIDDLEWARE
The primary goal of this paper is to design a
negotiation model that addresses the QoS contention
in a dynamic environment. In order to do this, It is
important we describe the environment in the
middleware which the negotiation process takes
place. The negotiation environment is characterized
by the following:
(1) The environment contains software agents that
represent IoT service providers and consumers. The
service providers are IoT devices that provide sensing
capabilities while the service consumers are IoT
devices that provide actuation capabilities or end-user
applications that provides an interface through which
an IoT service can be accessed.
(2) The agents negotiate over a set of negotiable
QoS parameters e.g response time and availability
(3) The environment is dynamic in nature as the
QoS parameters profile, negotiation deadline and
negotiation resources(e.g. CPU time and memory
allocation) could change due to changes that may
occur in the physical world. For example, the battery
of an IoT device running low can automatically
change the QoS parameters profile and an increased
workload on the CPU of the IoT edge node can
change the CPU time for a negotiation process.
(4) The environment is characterized by some
uncertainties as agents do not have complete
information about the state transitions in the
environment and the preferences of other agents.
(5) Agents can only observe actions taken
previously by other agents during the negotiation
process and the negotiation deadline.
Having described the negotiation environment,
we now focus our attention on the underlying
assumptions our QoS negotiation model is based on
Assumption1 (Utility function-based offers).
Agents take turns in a making offer in each round in
the set {R = 0,1…R
deadline
}.An offer contains an n
number of negotiable QoS parameters and each QoS
parameter can take a value of (
) within its range of
permissible values (
...
) in the
QoS profile. We adopted the microeconomics utility
function described in Besanko and Braeutigam
(2010) for the agents to generate offers. To model the
non-linear changes associated with the QoS
parameters of IoT devices, the negotiating agents use
the general exponential function to map each QoS
parameter value to a utility value (
(
)) as seen in
(1):
)
×(
−
)
×
(
−1
)
where
is a real number (0≤
≤1)
With the utility value of each parameter defined,
we assume that the utility of each of the QoS
parameter is linearly additive. Thus the utility value
of an offer can be defined as the weighted sum of the
individual utility as in (2):
U(s) =
∑
×
(
)
(2)
where
= normalized weight for each QoS
parameter (
∑
=1)
Based on equation (2), an agent reserved offer is the
sum of the utility value derived from
and an
agent preferred offer is the sum of the utility value
derived from
.
Assumption 2 (Difference in Preference). We
assume agents have different, sometimes opposite
preferences over QoS parameters and pursue their
self-interests.
Assumption 3(Dynamic and Unknown Agreement
Zone ). For all negotiation sessions, there exists an
agreement zone which can change during the
negotiation process and the agents are unaware of its
location or presence.
Assumption 4 (Termination of Negotiation). The
negotiation process terminates only when an
agreement is found or the deadline elapses as agents
are not permitted to withdraw from the negotiation
process.
Now that the assumptions have been highlighted,
the main components of the proposed model are
described below
QoS parameter: These are the non-
functional attributes of an IoT service over
which agents negotiate over. Agents can
negotiate over more than one attributes in a
negotiation session;
Negotiation Protocol: This specifies the set
of rules that characterise the interaction
between agents (Parkin, Kuo and Brooke,
A Reinforcement Learning QoS Negotiation Model for IoT Middleware
207

2006). It defines the negotiation states,
events that can cause a change in the
negotiation state and the valid actions of the
agents in the different states. In our model,
we adopted the stacked alternating offer
protocol (Aydogan, Festen, Hindriks and
Jonker, 2017). This protocol was chosen
because of its support for both bilateral and
multilateral negotiations as the IoT
middleware is required to support both
forms of negotiation;
Negotiation Strategy: This is the function
that enables agents to generate offers. In our
model, agents can decide to choose either
the concession strategy or the trade-off
strategy(Zheng, Martin and Brohman,
2012). These strategies use the utility
function to generate an offer. Agents are
required to decide which strategy to use for
each step in the negotiation process, that will
maximize their utility and reach an
agreement before the deadline elapses.
4 MODELLING THE QoS
NEGOTIATION
The dynamism that characterizes the negotiation
environment necessitated the modelling of the QoS
negotiation as a Markov Decision Process (MDP) as
agents are required to make decisions under these
conditions. MDP presents a standard formalism to
describe multistage decision making in a dynamic
environment (Puterman, 2005). MDP is defined by
the following elements:
S = a set of possible states, known as the
state- space, with an initial state s
0
;
A = a set of possible actions in a state s,
known as the action-space;
P = the transition model, where P(s′|s,a) is
the probability that action a∈A executed in
state s∈S will transition to state s′∈S;
R = the reward function, where R(s|a) is the
reward function received by executing
action a∈A in state s∈S;
π = the sequence of decisions(policy) that is
responsible for the mapping of states to
actions. The policy can be stationary (π = π,
π…. π) or non-stationary(π = π
0 ,
π
1,
π
2
… π
n
).
The objective in a standard MDP is to find the
optimum policy (π*) that yields the maximum sum of
discounted rewards over an infinite period.
Based on these key concepts of MDP, we model
the QoS negotiation as a set of n MDPs. We have n
processes with each agent having its own view of the
dynamics of the negotiating environment. Given the
description of the negotiation environment and the
assumptions made, the MDP inspired negotiation
process is characterized by the following:
Finite deadline: Unlike the standard MDP,
the negotiation process has a finite deadline,
so agents are required to maximise the
expected reward over a finite timeframe;
Discrete state-space: The negotiation space
is defined by the availability of resources for
the negotiation process, negotiation deadline
and QoS profile parameters. The changes
associated with the elements of the
negotiation state-space results in the
transition from one discrete state to another;
Non-stationary policy: Since the negotiation
environment is dynamic, the policy
associated with the negotiation process is
non-stationary. The optimum policy is
determined by a reinforcement learning
method;
Estimated transition model: Due to the
dynamics of the negotiation environment,
agents do not exactly know the probability
of state transition. In modelling this
uncertainty in this QoS negotiation context,
we defined a non-stationary estimation
function, T
n
to estimate the transition model
and is given as:
T
n
(s, a, s′): P
n
(s, a, s′) → [0,1] (3)
where n ∈ 0,1……N (n
th
time-step);
Action-space: This defines the negotiation
strategy. In our negotiation problem, agents
can choose either the concession strategy or
the trade-off strategy. The concession
strategy enables an agent to generate offers
that are of lower utility value to the offer
received. Selecting the tradeoff strategy
allows an agent to generate offers that are
attractive to other agents while maintaining
its desired utility value. This is achieved by
yielding on its less preferential QoS
parameters and demanding more on its more
preferential QoS parameters;
Reward function: Agents are rewarded based
on the strategy chosen at a given state. An
agent is rewarded for choosing the trade-off
strategy when there is sufficient time and
IoTBDS 2020 - 5th International Conference on Internet of Things, Big Data and Security
208

resources for the negotiation process and the
current range of permissible values of the
QoS parameters is large. Similarly, an agent
is rewarded for choosing the concession
strategy if the time and resources for the
negotiation process is running out and the
current range of permissible values of the
QoS parameters are small.
5 THE REINFORCEMENT
LEARNING NEGOTIATION
ALGORITHM
In this section, we begin by first introducing how we
can to approximately compute the optimal policy, the
optimal sequence of strategies to be adopted by the
negotiating agents during the negotiation process to
generate a QoS agreement. To achieve this, we
adopted a model-based reinforcement learning
method, value iteration in estimating the optimum
policy (Schwartz, 2014). The value iteration method
was chosen based on the fact that it is not
computationally expensive and it uses less time to
compute the optimal policy.
The first step in computing the optimal policy is
to introduce the concept of state value-function. In
reinforcement learning, the state value-function
defines the expected cumulative reward for an agent
beginning at a particular state s and under a specific
policy π (Alpaydin, 2014). Formally, the state value-
function at the n
th
time-step during the negotiation
process is defined as:
V
n
(s, π)=
∑
(
(
,
π
)|
=) (4)
where s
n
is the system state at the n
th
time-step, R
t
is
the reward at the n
th
time-step and E(R
t
(s
t
,π)|s
n
= s) is
the expected reward value at state s
n
= s and based on
policy π
t
. Equation (4) can be rewritten as:
V
n
(s, π)= R(s,a) +
∑
(s,a,
)×
(
,
π) (5)
where
∈ S
n+1
and a is the action (strategy)
determined by policy π. Amidst all the possible state
value functions, it has been proven that an optimal
policy π* that has the highest value exists for any
s ∈S.Additionally, for an arbitrary V
0
, the sequence
of V
n
has been proven to converge to V* under the
same conditions that guarantee the existence of V*
(Russell and Norvig, 2014).The state value-function
of the optimal policy is given by:
V
n
(s,π*)=max
a
[R
n
(s,a)+
∑
(s,a,
)×
(
,
π*)]
(6)
Given the uncertainty of the state-transition in the
negotiation process, we adapted equation (3) to
determine the expected transition model, which is
given by:
E
n
(P
n
(s, a, s′))=
∑
(
(,,
)×
P
n
(s, a, s′)) (7)
Combining Equation (6) and (7), we have:
V
n
(s,π*)=max
a
{R
n
(s,a)+
∑
(
(s,a,
)×
(
,π*)} (8)
Apart from the state value-function, reinforcement
learning presents another function known as the Q-
function, which is a function of a state-action pair
that returns a real value. The fundamental notion of
the optimal Q-function is that it can be defined by the
right-hand side of equation (8) as :
Q*(s,a) = R
n
(s,a)+
∑
(
(s,a,
)×
(
,
π*)
(9)
By this definition, the optimal Q-function Q*(s,a)
equals the sum of the immediate reward carrying out
action a in state s and the discounted expected reward
after transiting to the next state
. Thus we can
obtain the relationship between V
n
(s,π*) and Q*(s,a)
and this is expressed as :
V
n
(s,π*) = max
a
[Q*(s,a)] (10)
Once the Q*(s,a) for all the states is known, then the
optimal policy can be found. Based on this, an agent
can always select an action a that maximizes Q*(s,a)
in each state.
Based on the negotiation environment state-space
and the agent’s opponent’s offer, an agent is required
to either accept the opponent offer or decide which
strategy(concession or trade-off) to adopt to generate
an offer. An offer is accepted by an agent if the utility
value of the received offer is far greater than its utility
value of its reserved offer. The algorithmic
descriptions of both the concession and trade-off
strategy are presented in (Zheng et al., 2012). These
strategies were chosen in our proposed algorithm
because we can control the rate at which they
converge.
Having specified the negotiation strategies for
generating offers and reinforcement method for
selecting at a strategy at a specific time-step, we now
introduce our reinforcement learning negotiation
algorithm as shown in Algorithm1. This algorithm
A Reinforcement Learning QoS Negotiation Model for IoT Middleware
209

will enable negotiating agents to appropriately map a
strategy to a negotiation state resulting in the timely
discovery of a QoS solution. The algorithm begins by
allowing an agent to observe the negotiating
participant’s offer which is usually an offer with a
high utility for the agent’s opponent. Given that the
condition in line 2 is true, it proceeds to iteratively
compute V
n
(s,π*) for each time-step and all the states
Algorithm 1: Reinforcement Learning Negotiation
Algorithm.
Input : - The negotiating opponent offer (Y
i
)
- The deadline criterion
- Array B with the best and worst values for n QoS
parameters
- Array C with the weights of n QoS parameter
- Array D with flags of n QoS parameter; A flag
indicates if a QoS parameter preferred value is
greater than its reserved value.
-The reward function R
n
(s,a) for each (s,a)
-Parameter λ
1
and λ
2
(0 < λ
1,
λ
2
), indicating the
degree of concession and trade-off at instant n
respectively
-The estimation function for the state transition,
E
n
(P
n
(s, a, s′)) at instant n
Output: true if it is a success, otherwise false.
1. Offer Y
i
is presented
2. while Y
i
is not accepted
3. Compute iteratively
4. select the action that
maximises V
n
(s,π*)
5. if a=concession then
6. k
1
←k
1
+1
7. Y
i+1
← concession(A,B,C,k
1,
λ
1
)
8. else
9. k
2
←k
2
+1
10. Y
i+1
← trade-off (A,B,C,k
1
,λ
2
)
11. k ← k
1
+k
2
12. if Y
i+1
is out of bounds or
deadline criterion is reached
then
13. return FALSE
14. else
15. offer Y
i+1
is presented
16. return TRUE
including the terminal states((i.e states. indicating
that the deadline is reached, an agreement is found or
the negotiating resources in the IoT middleware are
exhausted). With the present state of the system
determined, it selects the action(i.e concession
strategy or trade-off strategy) that maximizes the
optimum Q function. The selected strategy is used in
generating a counter-offer. If the generated offer is
beyond the defined bounds or the deadline criterion is
reached, FALSE is returned; otherwise, TRUE is
returned and the counter-offer is presented. A QoS
solution is found when the condition in line 2 is true.
The reinforcement learning paradigm described in
Russel et al. (2014) and Zheng, et al. (2012) provides
proof that the reinforcement learning negotiation
algorithm converges and terminates after a finite
number of time-steps.
6 EVALUATION
To evaluate our algorithm, we considered a simple
bilateral negotiation scenario involving two
negotiation agents where the first agent represents the
IoT service provider and the other agent represents
the IoT service consumer. These agents were
implemented using the open-source project, Java
Agent DEvelopment Framework (JADE)
(Bellifemine, Giovanni and Dominic, 2007). We
implemented the reinforcement learning negotiation
algorithm using Java and all the experiments were
conducted on a Lenovo laptop with a 2.50GHz Intel
i5 processor with 8GB memory running Windows 10.
The concept of multi-threading in Java was used to
model the behaviour of both agents as we utilize the
thread synchronization method to model the
exchange of offers and counter-offers. We developed
a QoS profile in a JSON format based on the ideas in
the IoT literature of Villalonga, Bauer, Aguilar,
Huang and Strohbach (2010), which defines its
service and three QoS parameters: response-time
(RT), availability(AVAL) and throughput(TP). The
agents preference over these QoS parameters are kept
private and the negotiation process begins with the
IoT service consumer presenting its preferred offer.
We compared the reinforcement learning negotiation
model with the mixed strategy negotiation model
described in Zheng et al. (2014) that uses a random
probabilistic model for the selection of a strategy
during the negotiation process. This strategy was
chosen for the comparison because it inspired our
algorithm and it provides a good balance between the
success rate and social welfare. We used three metrics
for the comparison: negotiation turns, success rate
and social welfare.
To simulate the dynamics in the negotiation
environment, we had 8 states(2 negotiation
deadlines[D
1
, D
2
], 2 states of resource availability
[low, high] and 2 utility values for the reserved [U
1
,
U
2
]) and 64 state transitions. Each of the state
transitions is associated with a strategy, estimation
IoTBDS 2020 - 5th International Conference on Internet of Things, Big Data and Security
210

function and reward function. Table 1 below shows a
snippet of this association. We conducted a series of
experiment with different permissible values and
weights for each of the QoS parameters of each agent.
In all the experiments, the values of λ
1
and λ
2
were
fixed at 0.10. While the difference between the
preferred value of both agents for the RT, AVAL and
TP was set at a maximum 0.45, 0.60 and 0.55, that of
the reserved value was set to a maximum of 0.30,0.23,
0.15 respectively. Similarly, the difference in the
deadline criterion was set at 15. Table 2 shows an
example of a specific set of values for the negotiation
parameters.
Table 1: The State Transitions Table.
Current
State
(s)
Next
State (s′)
Action
(strategy) EF
RD
Concession P
CS
R
CS
Concession P
CS
R
CS
Trade-off P
TO
R
TO
Trade-off P
TO
R
TO
EF→ Estimation Function P
n
(s, a, s′)
RD→Reward Definition R(s,s′|a)
Table 2: Sample Negotiation Parameters.
IoT Service
Consumer
IoT Service
Provider
RT weight 0.3 0.4
range ~0.92 - 0.76* 0.95* - 0.74~
AVAIL weight 0.2 0.4
range ~0.95 - 0.81* 0.93* - 0.81~
TP weight 0.5 0.2
range ~0.90 - 0.83* 0.91* - 0.76~
Deadline criterion 35 rounds 50 rounds
* indicates the preferred value and ~ indicates the
reserved value
In these experiments, we observed that the
reinforcement learning model consistently had a
better performance compared to the mixed strategy
negotiation model. The average round taken to
discover an agreement using our algorithm was 38%
less than average rounds of the mixed strategy
negotiation algorithm. In terms of social welfare,
there was an average increase of 19% in the utility
gained with our algorithm. These improvements in
performance are primarily based on the selection of a
reward scheme that maintained a balance between
reaching an agreement before the deadline and a high
social welfare thereby making the agents select the
appropriate strategy based on the changes that occur
in the negotiation environment. To demonstrate this,
Figure 2 and Figure 3 illustrates the results of some
selected negotiation sessions comparing both
approaches in terms of social welfare and negotiation
turns. Since the reinforcement learning model and
the mixed strategy model made use of algorithms that
have been proven to converge at a finite period, they
achieved roughly the same average success rate of
98.74% and 95.12% respectively.
Figure 2: Negotiation rounds results for reinforcement
learning model and mixed strategy model.
Figure 3: Social welfare results for reinforcement learning
model and mixed strategy model.
7 CONCLUSION
This paper introduces a model-based reinforcement
learning algorithm for the QoS negotiation in the IoT
ecosystem. The algorithm selects the best strategy to
be used by negotiating agents at each time-step during
the negotiation process when the IoT environmental
dynamics are probabilistically known. This selection
is based on the observed changes in the negotiation
environment. Preliminary results demonstrate that
our approach of using reinforcement learning tends to
lead to a negotiation process in which an agreement
is found before the deadline and offers a better
success rate and social welfare compared to the
approach that uses a random a probabilistic
algorithm.
Although in this paper we restricted our
negotiation model to bilateral negotiation scenario, it
[low, U
1
,D
1
]
[low, U
1
,D
2
]
[high, U
1
,D
1
]
[low, U
1
,D
2
]
[high, U
1
,D
2
]
[high, U
2
,D
2
]
[low, U
1
,D
1
]
[low, U
1
,D
1
]
A Reinforcement Learning QoS Negotiation Model for IoT Middleware
211

can be easily extended to multilateral negotiation
scenario given that the negotiation protocol adopted
supports multilateral negotiation. In the future, we
plan to extend the QoS model that takes into account
situations where system dynamics is not
probabilistically known.
REFERENCES
Patel, K. K., and Patel, S. M. (2016). Internet of Things -
IoT: Definition, characteristics, architecture, enabling
technologies, application & future challenges.
International Journal of Engineering Science and
Computing, 6(5), 6122-6131.
Duan, R., Chen, X., and Xing, T. (2011). A QoS
architecture for IoT. 2011 International Conference on
Internet of Things and 4th International Conference on
Cyber, Physical and Social Computing, 717-720.
White, G., Nallur, V., and Clarke, S. (2017). Quality of
service approaches in IoT: A systematic mapping.
Journal of Systems and Software, 186-203.
Thoma, M., Meyer, S., Sperner, K., Meissner, S., and
Braun, T. (2012) On IoT-services: Survey,
Classification and Enterprise Integration. 2012 IEEE
International Conference on Green Computing and
Communications, 257-260.
Razzaque, M. A., Milojevic-Jevric, M., Palade, A., and
Clarke, S. (2015) Middleware for Internet of Things: A
Survey. In IEEE Internet of Things Journal, 3(1), 70-
95.
Issarny, V., Bouloukakis, G., Georgantas, N., and Billet, B.
(2016). Revisiting Service-Oriented Architecture for the
IoT: A Middleware Perspective. International
Conference on Service-Oriented Computing,1-16.
Bala, M. I., and Chishti, M. A.(2017) A model to
incorporate automated negotiation in IoT. 2017 IEEE
International Conference on Advanced Networks and
Telecommunications Systems (ANTS), 1-4.
Ghumman, W. A., Schill, A., and Lässig, J. (2016). The
Flip-Flop SLA Negotiation Strategy Using Concession
Extrapolation and 3D Utility Function. 2016 IEEE 2nd
International Conference on Collaboration and
Internet Computing (CIC), 159-168.
Zheng, X., Martin, P., Brohman, K., and Da Xu, L. (2014).
Cloud Service Negotiation in Internet of Things
Environment: A Mixed Approach. In IEEE
Transactions on Industrial Informatics, 10(2), 1506-
1515.
Alanezi, K. and Mishra, S. (2018). A privacy negotiation
mechanism for IoT. 2018 IEEE 16th Intl Conf on
Dependable, Autonomic and Secure Computing, 16th
Intl Conf on Pervasive Intelligence and Computing, 4th
Intl Conf on Big Data Intelligence and Computing and
Cyber Science and Technology
Congress(DASC/PiCom/DataCom/ CyberSciTech),
512-519.
Li, F. and Clarke, S. (2019). A Context-Based Strategy for
SLA Negotiation in the IoT Environment. 2019 IEEE
International Conference on Pervasive Computing and
Communications Workshops (PerCom Workshops)
208-213.
Zulkernine, F. H. and Martin, P. (2011). An adaptive and
intelligent SLA negotiation system for web services.
IEEE Transactions on Services Computing, 4(1), 31–
43.
Al-Aaidroos, M., Jailani, N. and Mukhtar, M. (2011).
Agent-based negotiation framework for web services
SLA. 2011 7th International Conference on
Information Technology in Asia, 1-7.
Pouyllau, H., & Carofiglio, G. (2013). Inter-carrier SLA
negotiation using Q-learning. Telecommunication
Systems,
52(2), 611-622.
Besanko, D. and. Braeutigam, R. R.(2010)
Microeconomics, Wiley. New Jersey, USA, 4
th
edition.
Parkin, M., Kuo, D., and Brooke, J. (2006). A Framework
and Negotiation Protocol for Service Contracts. 2006
IEEE International Conference on Services Computing
(SCC'06), 253-256.
Aydoğan, R., Festen, D., Hindriks, K. V., and Jonker C.
M. (2017). Alternating Offers Protocols for Multilateral
Negotiation. In Modern Approaches to Agent-based
Complex Automated Negotiation. Studies in
Computational Intelligence, Springer, Switzerland,
153-167.
Zheng, X., Martin, P., and Brohman, K. (2012). Cloud
service negotiation: Concession vs. tradeoff
approaches. In Proc. 12th IEEE/ACM Int. Symp.
Cluster, Cloud Grid Comput. (CCGrid 2012). pp. 515–
522.
Puterman, M. L. (2005). Markov Decision Processes:
Discrete Stochastic Dynamic Programming, Wiley &
Sons. New Jersey, USA.
Schwartz, H. M. (2014). Multi-Agent Machine Learning: A
Reinforcement Approach, Wiley & Sons. New Jersey,
USA.
Alpaydin, E. (2014). Introduction to Machine Learning,
MIT Press. Cambridge, MA, USA, 3
rd
edition.
Russell S., and Norvig, P. (2014). Artificial Intelligence: A
Modern Approach, Pearson. Essex, England, 3
rd
edition
Bellifemine, F. L., Caire, G., and Greenwood, D. (2007).
Developing Multi-Agent Systems with JADE, Wiley &
Sons. England.
Villalonga, C., Bauer, M., Aguilar, F. L., Huang, V. A.,
and Strohbach, M. (2010). A resource model for the real
world internet. In European Conference on Smart
Sensing and Context. 163–176.
IoTBDS 2020 - 5th International Conference on Internet of Things, Big Data and Security
212
