
Serverless Container Cluster Management for Lightweight Edge Clouds
Fabian Gand, Ilenia Fronza, Nabil El Ioini, Hamid R. Barzegar and Claus Pahl
Free University of Bozen-Bolzano, Bolzano, Italy
Keywords:
Edge Cloud, Container, Cluster Architecture, Raspberry Pi, Single-board Devices, Docker Swarm, Big Data,
Data Streaming, Performance Engineering, Serverless, FaaS, Function-as-a-Service.
Abstract:
Clusters consisting of lightweight single-board devices are used in a variety of use cases: from microcon-
trollers regulating the production process of an assembly line to roadside controllers monitoring and man-
aging traffic. Often, data that is accumulated on the devices has to be sent to remote cloud data centers for
processing. However, with hardware capabilities of controllers continuously increasing and the need for better
performance and security through local processing, directly processing data on a remote cluster, known as
Edge Computing, is a favourable solution. Recent trends such as microservices, containerization and server-
less technology provide solutions for interconnecting the nodes and deploying software across the created
cluster. This paper aims at proposing a serverless architecture for clustered container applications. The ar-
chitecture relies on the MQTT protocol for communication, Prometheus for monitoring and Docker swarm
in conjunction with openFaas for deploying services across a cluster. Using the proposed architecture as a
foundation, a concrete traffic management application is implemented as a proof-of-concept. Results show
that the proposed architecture meets performance requirements. However, the network set-up as well as the
network capabilities of the used devices were identified as potential bottlenecks.
1 INTRODUCTION
Internet-of-Things (IoT) and edge computing plat-
forms allow to transfer computation and storage away
from classical data centre clouds. Communication in-
frastructures such as the 5G mobile standard aim at
enabling communication between edge and IoT de-
vices almost in real time with transfer rates of up to 20
Gbit/s (5G-CARMEN, 2019), driven by low latency
needs. In addition to higher transfer rates, they also
offers new technologies such as Network Function
Virtualization (NFV) allowing the execution of code
functions on generic hardware nodes without having
to install specific hardware (Kiss et al., 2018). Soft-
ware Defined Networking (SDN) allows third parties
to directly use hardware resources by defining the de-
sired set-up in a programmatic way.
These technologies can be based on the so-called
’serverless’ concept. Serverless aims at shifting the
responsibility of deploying, scaling and maintaining
the software to an infrastructure provider. Instead of
deploying and running an application on designated
hardware themselves, developers only need to hand it
over to the serverless platform. Despite being only a
recent trend, serverless technology is already used in a
wide variety of cases. Baldini et al. show that interest
has been increasing since 2015 (Baldini et al., 2017).
So far, published research has focused on trends and
shortcomings (Baldini et al., 2017) or reviewing dif-
ferent frameworks (Kritikos and Skrzypek, 2018). In
order to provide new experimental evidence, we im-
plement and evaluate a serverless use case application
on a lightweight edge cluster architecture. Processing
tasks are computed directly on nodes at the edge of
a cluster and are not send to remote processing hubs.
We evaluate whether a serverless system is a suitable
basis for demanding use cases in edge environments.
Since small, single-board devices, like the Raspberry
Pi, are widely adopted and will potentially keep in-
creasing their processing power, we investigate if and
under what conditions a cluster of such devices is
able to support a complex, low-latency system that is
tightly constrained by a fixed set of requirements. Our
proposed architecture is based on industry-standard
technologies such as MQTT for inter-cluster commu-
nication, openFaas and Docker Swarm for the imple-
mentation of the serverless concepts and Prometheus
for monitoring. The evaluation validates how the
functional and non-functional requirements are ad-
dressed in the proposed system. We also analyse the
advantages and disadvantages the serverless concept
offers over traditional approaches of deployment. Ad-
302
Gand, F., Fronza, I., El Ioini, N., Barzegar, H. and Pahl, C.
Serverless Container Cluster Management for Lightweight Edge Clouds.
DOI: 10.5220/0009379503020311
In Proceedings of the 10th International Conference on Cloud Computing and Services Science (CLOSER 2020), pages 302-311
ISBN: 978-989-758-424-4
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

ditionally, we report on the performance of the system
for different scenarios. Potential bottlenecks will be
identified and discussed.
The paper is structured as follows. In Section 2,
concepts and technologies are introduced. Section 3
discusses related work on distributed edge systems.
Section 4 describes the high-level architecture before
describing each component in greater detail. Section
5 evaluates the architecture. We conclude with a final
overview and suggestions for future research.
2 TECHNOLOGY SELECTION
This section introduces key concepts as well as spe-
cific tools and technologies. The final subsection de-
scribes how the tools and technologies can be com-
bined to create a lighweight edge architecture.
2.1 Background Technologies
Edge Computing is different from cloud computing.
Cloud computing is based on data centers that are able
to process large amounts of data (Kiss et al., 2018).
Data from local systems is usually sent to and pro-
cessed by the cloud. After the computation is com-
plete, a result may be returned to the local network.
This approach, however, leaves the potential local
processing power of the network unused and comes
with a significantly increased latency. Edge comput-
ing leverages the processing power of nodes "at the
edge" of the network. These nodes are an intermedi-
ate layer between the devices (Kiss et al., 2018).
Microservices have become popular in recent
years. Traditional architectures usually ship an ap-
plication as a monolith: the entire application is bun-
dled into one executable that was deployed on specific
hardware. When switching to a microservice archi-
tecture, the monolith is split into microservices, run-
ning in an independent process and having their own
deployment artifacts (Jamshidi et al., 2018).
Serverless Computing is a new concept for the
deployment of cloud applications (Baldini et al.,
2017). Serverless allows developers to focus solely on
the application code without being concerned about
the servers it is deployed on. The tasks of managing
and scaling the application are handled by the cloud
provider: with serverless, the developer can expect
the code to be fault-tolerant and auto-scaling. In ad-
dition to the major cloud providers already offering
serverless functionality, several openSource frame-
works have been developed and released in recent
years. These solutions usually involve having to self-
host the serverless frameworks on own hardware in-
stead of relying on hardware provided by third-party
providers. This work will focus on open source,
self-hosted solutions. Serverless is different from
PaaS (Platform-as-a-service) and SaaS (Software-as-
a-Service) where the deployment of code is specifi-
cally tailored to the platform.
• FaaS: usually, serverless computing is accompa-
nied by a concept called Functions-as-a-Service
(FaaS). Here, small chunks of functionality are
deployed in the cloud and scaled dynamically by
the cloud provider (Kritikos and Skrzypek, 2018).
These functions are usually even smaller than mi-
croservices. They are short-lived and have clear
input and output parameters, similarly to func-
tions used in most programming languages.
• Serverless Microservices: if the component to be
deployed is more complex than a simple function
and is supposed to stay active for a longer period
of time, a stateless microservice could be consid-
ered (Ellis, 2018). Managing and deploying these
microservices is similar to serverless functions.
Open-source serverless frameworks that we ini-
tially considered are summarised in Table 1. Com-
pleteness, licensing model and support for Docker
and Prometheus led us to select openFaas.
2.2 Platform Technology Review
The concrete hardware, software and standards used
in our architecture shall now be introduced.
The Raspberry Pi is a single-board computer
based on an ARM-processor. Since the start in 2012
there have been four major iterations of the Raspberry
Pi platform. The version 2 B models we use include a
900MHz quad-core ARM Cortex-A7 CPU and 1GB
of RAM.
Docker is a containerization software. Container-
ization is a virtualization technology that, instead of
virtualizing hardware, separates processes from each
other by utilizing features of the Linux kernel. Docker
containers bundle an application along with all of its
dependencies. Docker offers the ability to create,
build and ship containers. Compared to virtual ma-
chines, containers offer a better use of the hosts re-
source while providing similar advantages of having
a separate system. Images are the blueprints of docker
containers. Each container is created from an im-
age. The images are built using Dockerfiles, which
describe the system to be constructed. Docker (the
Docker Engine) is based on a client-server architec-
ture. The client communicates with the Docker dea-
mon via a command-line-interface. The docker dae-
mon is in charge of managing the components and
Serverless Container Cluster Management for Lightweight Edge Clouds
303

Table 1: Comparison of open-source serverless frameworks.
Framework Languages Type License Vendor Monitoring Key components
openFaas
C#, Dockerfile, Go,
Java, NodeJS, PHP,
Python, Ruby
Complete
Frame-
work
MIT
community
driven
Prometheus
Container(Docker),
Prometheus, gate-
way API, GUI
OpenWhisk
NodeJS, Swift, Java,
Go, Scala, Python,
PHP, Ruby, Ballerina
Complete
Frame-
work
Apache
License
2.0
Apache
Kamon for
system metrics,
kafka events
for user metrics
nginx Web-
server, CouchDB,
Kafka, Contain-
ers(Docker)
Kubeless
Python, NodeJS,
Ruby, PHP, Go,
.NET, Java, Ballerina
Complete
Frame-
work
Apache
License
2.0
community
driven
Prometheus
Kubernetes (na-
tive)
Serverless
(community)
(Serverless,
2019)
Python, NodeJS,
Java, Go, Scala, C#
CLI for
building +
deploying
MIT
Serverless,
Inc.
-
Deployment to
providers: AWS,
MS Azure etc.
containers. Docker services represent the actual ap-
plication logic of a container in production. Using
services, a web application could be split into one
service for the front-end components, one for the
database and another one for the content management
system used to update the site.
Docker Swarm is the cluster management tool in-
tegrated into Docker. Instead of running the services
and their corresponding containers on one host, they
can be deployed on a cluster of nodes that is managed
like a single, docker-based system. By setting the de-
sired number of replicas of a service, scaling can also
be handled by the swarm.
Hypriot OS is an operating system based on De-
bian that is specifically tailored towards using Docker
containerization technology on ARM devices such as
the Raspberry Pi. Ansible is a tool for automating
tasks in a cluster and cloud environments such as
individual node configuration or application deploy-
ment. MQTT is a network protocol designed for IoT.
It is primarily used for unreliable networks with lim-
ited bandwidth. Prometheus is a monitoring tool to
gather and process application metrics. It does not
rely on the application delivering the metrics to the
monitoring tool. Prometheus scrapes the metrics from
a predetermined interface in a given interval. This
means that the metrics are expected to be exposed by
the application.
openFaas is a Functions-as-a-Service (FaaS)
framework. It can be deployed on top of a Docker
swarm or a Kubernetes cluster. When starting the
openFaas framework, some standard docker contain-
ers are deployed: Gateway is used as the central gate-
way for calling functions from anywhere in the clus-
ter. A Prometheus instance is running on this con-
tainer. The Alertmanager reads Prometheus metrics
and issues alerts to the gateway. By default, openFaas
contains a simple autoscaling rule that leverages the
default metrics aggregated by Prometheus and scales
based on predefined thresholds (openFaaS, 2019).
2.3 Requirements & Platform Selection
Among the serverless frameworks compared in Ta-
ble 1, openFaas was selected for the implementa-
tion of the application. The reasons are: (i) a wide
array of supported languages, (ii) openFaas being a
complete, all-in-one framework, (iii) Prometheus as
an integrated, extendable monitoring solution, (iv) a
simple set-up process and (v) its out-of-the-box sup-
port for Docker Swarm. Other frameworks either
lacked a simple monitoring solution (serverless), in-
cluded more custom components that needed to be
configured manually (openWhisk) or did not support
Docker Swarm (Kubeless).
To meet the requirements for a lightweight edge
platform, the tools and technologies we used need to
provide a high level of flexibility while preserving the
limited hardware resources of the cluster. By splitting
the application into microservices and containerizing
it, the hardware can be reallocated dynamically (Men-
donca et al., 2019). This also enables scaling the dif-
ferent parts of the application in a simple way. The
Docker images leave a minimal footprint on the de-
vices, making efficient use of the hardware. MQTT,
as a lightweight protocol, has a similar advantage,
while its underlying publisher/subscriber pattern sim-
plifies communication in an environment where ser-
vices are added and removed constantly. Establishing
peer-to-peer communication would be significantly
more complex. OpenFaas is a simple way of building
and deploying services/functions across the cluster. In
CLOSER 2020 - 10th International Conference on Cloud Computing and Services Science
304

addition to the obvious functionality, some of its fea-
tures, such as the built-in Prometheus instance or the
gateway, can be extended upon to make openFaas the
central building block of the application. Even though
the openFaas scaling functionality is limited by de-
fault, it can be used as a foundation to implement a
more fine-grained scaling algorithm using the built-
in monitoring options. An overview of the proposed
architecture is shown in Figure 1.
Figure 1: Hardware and networking components.
3 RELATED WORK
The discussion of serverless technology is still in its
early stages (Baldini et al., 2017). The authors in-
troduce several commercial implementations such as
Amazon’s AWS Lambda or Microsoft Azure Func-
tions. Major advantages mentioned are the responsi-
bility of managing servers and infrastructure that no
longer rests with the developer.
(Kritikos and Skrzypek, 2018) review serverless
frameworks. They highlight the need for new meth-
ods to create an architecture for applications that
contain both servlerless components like functions
as well as classic components such as microservices
running inside a Docker Container. They also note
that the decision on how the application components
should scale is largely left to the developer and sug-
gest further research into automating this.
(Kiss et al., 2018) gather requirements for appli-
cations using edge computing, specifically combining
them with the 5G standard. They mention that re-
cently released single-board devices open up the pos-
sibility of processing some of the data at the edge.
This, however, creates the challenge of orchestrating
the available processing power. The IoT system needs
to reorganize itself based on changing conditions.
(Tata et al., 2017) outline the state of the art as well
as the challenges in modeling the application archi-
tecture of IoT edge applications. A sample scenario
is a system for smart trains based on the principles of
edge computing. The system is comprised of a set of
different sensors attached to crucial components.
The papers reviewed above offer an overview over
the requirements and create proposals for the archi-
tecture of distributed IoT systems. They also offer
guidance on where more research could be conducted.
They remain, however, on an abstract level and do not
implement prototypes for analysis and experimenta-
tion. The work presented here aims at making use
of the proposed approaches to implement a concrete,
distributed IoT System based on a real-life scenario
that is executable, observable and analyzable. The de-
vised solution will be evaluated in a second step.
A system that is comparable to the one proposed
here has been presented in (Steffenel et al., 2019).
The authors introduce a containerized cluster setup
on single-board devices that is tailored towards ap-
plications that process and compute large amounts of
data. They note that the performance of the RPI clus-
ter is still acceptable and could be a suitable option
for comparable use cases. During the evaluation they
also identified the poor networking performance of
the Raspberry Pis as an additional bottleneck. Ad-
ditional topics that we will additionally address here,
such as a serverless architecture for such systems or
scaling options, are not within the scope of that paper.
4 PROPOSED ARCHITECTURE
We now provide an overview of the proposed archi-
tecture. The aim is to develop a container manage-
ment platform, deployed on a cluster of single-board
devices, based on the concepts of serverless comput-
ing and microservices architecture. We will first in-
troduce the foundation of the application: the under-
lying hardware and the set-up process of the cluster.
In a second step, the building blocks of the application
are introduced at a conceptual level before covering
low-level implementation details. The proposed bind-
ing blocks of the application such as the serverless
and microservices-based architecture can be reused
for different applications in different contexts. The
generic scaling component is applicable in different
applications by adjusting a few constants.
4.1 Architecture Overview
The application is composed of three main architec-
ture layers (Pahl et al., 2018). The platform layer rep-
resents the hardware architecture of the cluster and
the application. The system layer includes the com-
ponents of the system. On top of these two, the con-
troller layer scales the components of the platform.
Serverless Container Cluster Management for Lightweight Edge Clouds
305

Figure 2: System context: interaction between systems.
Figure 2 shows the interaction between the system
layer, the controller layer and additional components.
We apply the generic architecture here to a traf-
fic management application. A Traffic Management
System (TMS) manages and coordinates a number of
cars in a road section. Services could autonomous
driving functions such as maneouvering or state share
features. The Vehicle System (VS) represents the cars
here. This application is an example of a mobile,
low=latency platform that we modelled after the 5G-
CARMEN project (5G-CARMEN, 2019). The TMS
contains all core functions of the system. There is
a constant exchange of messages between the Traffic
Management System TMS and the VS that contains
simulations of vehicles. The Control System (CS) is
used to scale parts of the TMS based on the current
situation and a number of predefined factors.
4.2 Platform Architecture
The high-level platform layer, shown in Figure 3,
aims at hiding some of the lower layer cluster man-
agement to the application. The application is de-
ployed on a cluster managed by Docker Swarm. The
cluster includes one master node and an arbitrary
number of worker nodes. Ansible is used to execute
commands on all nodes without having to connect to
each node individually. All nodes are able to connect
to the MQTT broker that is running on the master de-
vice after startup. All nodes establish a connection to
the master by addressing it by its hostname. Using
Docker Swarm and openFaas, the RPIs are connected
in such a way that they can be seen as one system. If a
service is supposed to be deployed, openFaas will dis-
tribute it among the available nodes. There is no need
to specify the specific node as this abstraction layer is
hidden behind openFaas. The services and functions
are built and deployed using the openFaas command
line interface. Almost all services run the python:3.6-
alpine docker image. This image is based on Alpine,
a minimalistic, lightweight Linux distribution, that is
shipped with a python 3 installation. OpenFaas is also
used to scale the services independently. Communi-
cation between the services is achieved by relying on
the openFaas gateway as well as on the MQTT broker.
Figure 3: Platform and Application Layer: platform and
traffic management application components.
The cluster in our experimental setting is com-
prised of eight Raspberry Pi 2 Model B connected to a
mobile switch via 10/100 Mbit/s Ethernet that is pow-
ering the RPIs via PoE (Power over Ethernet) (Sco-
lati et al., 2019). The system components are split
into three repositories. The rpicluster repository con-
tains the clout-init configuration files for setting up
the Raspberry Pis. The rpicluster-application repos-
itory ncludes all microservices and scripts that make
up the application logic. The last repository includes
a modified version of the the openFaas repository. We
provide detailled information here in order to give ev-
idence for the feasibility of the setup and provide re-
peatable configuration and installation instructions.
All nodes of the cluster run HypriotOS. The mas-
ter initiates the Docker Swarm. The only com-
mand that needs to be executed on the workers is the
swarm join command. It can be distributed among
the nodes by using Ansible. After this command is
executed on each node, the swarm is fully set-up.
The worker nodes contain almost no additional de-
pendencies since they are all included in the docker
containers. The only additional dependencies that
are directly installed on the nodes are used to run a
python script that monitors system metrics and pub-
lishes them to the metrics service.
4.3 Monitoring
Monitoring utilises the openFaas Prometheus in-
stance. The metrics service is used to acquire met-
rics about the system, mainly by serving as a central
hub that accumulates all cluster-wide metrics and by
publishing those metrics via a flask HTTP endpoint.
This endpoint is the central interface for Prometheus
to collect from. The Prometheus python API is used
to implement the metrics collection. The metrics ser-
vice currently exposes the number of messages, such
CLOSER 2020 - 10th International Conference on Cloud Computing and Services Science
306

as the number of active cars for the TMS/VS as well
as the cumulative memory and CPU usage. The num-
ber of messages is implemented as a counter which is
continuously increasing.
The Prometheus instance is used to store metrics
and query them when needed. Prometheus provides
a rest API along with a language called PromQL to
aggregate and query metrics (?). The aggregated data
is returned in JSON format.
Before startup, Prometheus needs to be informed
about the endpoints that metrics should be collected
from. The Prometheus instance that is shipped with
openFaas only collects metrics from the openFaas
gateway since only metrics related to function ex-
ecution are being monitored by default. Config-
uring the openFaas Prometheus instance to aggre-
gate custom metrics of an application is not docu-
mented. Exploring this possibility and implement-
ing it was a part of the scope of this work. In or-
der to add a second endpoint for the additional met-
rics, the openFaas repository had to be forked and the
prometheus/prometheus.yml configuration file had to
be edited, adding the metrics endpoint to the file. The
metrics microservice is accessible via the gateway.
Therefore, it is possible to address the metrics end-
point by calling the gateway without need to specify
the static IP address of the node the metrics service is
running on. Specifying the metrics path (/appmetrics)
as well as the port (8080) is also mandatory.
4.4 Application Feature Requirements
In the following section, the application-level features
and non-functional requirements of the traffic man-
agement use case are described. This will be done
by highlighting which parts of the system address a
specific requirement.
• Simulate vehicles: The vehicles are simulated by
the vehicle service VS. Communication between
the gatherer and vehicle services is implemented
using MQTT. Video streams for in-car consump-
tion are received by the central openFass gateway.
• Collect vehicle information: The gatherer service
collects and aggregates vehicle information.
• Continuous modeling of current state of the road
section: The gatherer service includes an internal
representation of the road section.
• Issue commands to vehicles: Commands are is-
sued via MQTT by the gatherer service. Decision-
making functionality is both available as a sepa-
rate serverless function and as built-in functional-
ity within the gatherer service.
• Provide video streaming: The video service in-
stances act as broadcasters. Vehicles access these
broadcasters using the central openFaas gateway.
• Provide bus for communication between ser-
vices: The use of the openFaas gateway and the
mosquitto broker offer a way to access services
without having to know the address of the hard-
ware node they are running on, thus enabling the
simple transparent discovery of new services and
communication between components.
The application is split into different services that
can be easily deployed across the cluster from a cen-
tral node. Physical access to individual nodes is not
necessary. The system can be reconfigured by us-
ing the corresponding central service. Configura-
tion changes are automatically distributed across the
nodes by using the MQTT subscriber/publisher pat-
tern. Several gatherer services are usually deployed
at the same time. If a gatherer is added or removed
the vehicles are automatically distributed among the
available gatherers. The scaling functionality ensures
that the performance remains above a certain SLO.
5 EVALUATION
The proposed system shall be evaluated in terms of
performance and dependability (scalability) concerns.
5.1 Evaluation Objectives
The focus lies on evaluating the performance of the
proposed serverless microservice solution.
• Performance: The objectives of the evaluation are
as follows. One main goal was to find structural
and architectural weaknesses, refactor the system
based on the findings and evaluate the effective-
ness of the refactoring process. Those weaknesses
can be found focusing on parts of the application
that introduce performance bottlenecks. The bot-
tlenecks are identified by measuring certain per-
formance metrics that are introduced later on.
We present the evaluation results of an initial
and a refactored system architecture in order to
demonstrate the importance of the architectural
design in the platform implementation. It will also
highlight generic challenges of lightweight clus-
tering and how these can be addressed. There-
fore, a two-stage evaluation approach with initial
and refactored architectures is essential.
• Scalability: Finally, based on the final, complete
set-up of the system, there was a need to evaluate
Serverless Container Cluster Management for Lightweight Edge Clouds
307
the maximum number of vehicles the set-up (in-
cluding the network it was operated in) could sup-
port in order to maintain dependability through
determining the scalability limits.
These objectives were evaluated for two cluster
set-ups. To obtain a first understanding of the system
and the possible range of variables, first, an evaluation
of a calibration pilot was conducted on a small cluster
of 3 RPIs. Afterwards, the evaluation procedure was
repeated for a complete cluster of 8 devices.
5.2 Evaluation Set-up
Performance: All evaluation steps report on a num-
ber of performance metrics that indicate the effective-
ness of the system or provide insight into an internal
process. The Message Roundtrip Time (MRT) is the
central variable of the system since it reports on the
effectiveness of the autonomous driving functionality.
Included in the MRT is the (openFaas) Function Invo-
cation Time (FIT) that is listed separately to be able to
individually report on the serverless performance. In
this evaluation, all MRT and FIT values are consid-
ered average values aggregated over the last 20 sec-
onds after the previous scaling operation was com-
pleted. In our study, the maximum scale value was
unknown. In some real-life scenarios this value might
have been specified beforehand. Over the course of
this evaluation, different MRT thresholds are applied.
Workload: For all configurations and iterations
that were evaluated, the hardware workload was mea-
sured by computing the average CPU and memory us-
age over all nodes of the cluster, combining it to a sin-
gle value. This is possible, because the entire cluster
can be seen as one system by combining the individ-
ual nodes using Docker swarm and openFaas.
5.3 Evaluation – Default Architecture
The first evaluation round looked at the default archi-
tecture with two set-ups (calibration and full).
Round 1 – Calibration Pilot: The evaluation was
started with a calibration cluster consisting of three
RPIs: a master and two worker nodes. The maximum
scale value was set to 5 in order to avoid scaling the
system to a point the set-up could not handle anymore.
Table 2 reports on the initial metrics for different
numbers of vehicles. The scaling functionality was
enabled during monitoring, with its variables set to
the values reported in Figure 3. Table 3 includes the
data of the scaling algorithm for an initial run (Gand
et al., 2020). The number of scaled components is
also reported. Manually set variables were Maximum
Scale Value: 5, MRT Threshold: 2.0 seconds.
Table 2: Results for a cluster of three RPIs.
Vehicles Memory CPU MRT FIT
2 25.55 46.97 1.63 1.51
4 37.94 47.24 1.85 1.48
8 57.1 49.36 1.79 1.61
12 71.77 51.81 4.49 1.79
14 92.78 55.49 10.24 2.13
Table 3: Scaling run for a cluster of three RPIs with a (fixed)
number of 12 cars – with IT: Invocation Time after scaling,
Df: Decision Function.
Iteration IT # gatherer # DF
1 1.74 10 5
2 2.5 10 5
3 2.05 10 5
4 1.9 12 6
The CPU Usage started at 47% and showed a lin-
ear increase up to about 56% at 14 vehicles. The hard-
ware does not seem to be the limiting factor. The ini-
tal setup, however, shows a MRT of about 1.6 sec-
onds for only 2 vehicles. At 12 vehicles, a Roundtrip
Time of 4.5 seconds is reached and for 14 vehicles,
the MRT is already above 10 seconds, which is a value
that is too high for many real-world scenarios. With
only three RPIs and the given default setup, the per-
formance of the system is limited.
0
5
10
15
20
25
2
4
6
8
10
# vehicles
MRT
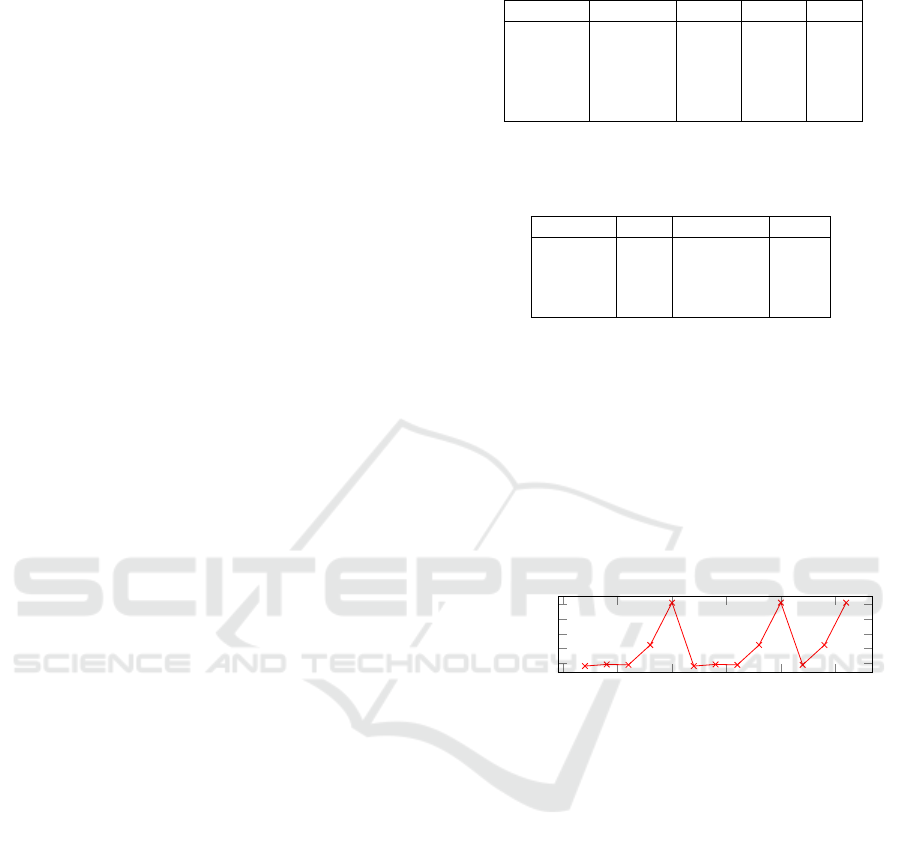
Figure 4: Average MRT - 8 RPI cluster, increase of vehicles.
Round 1 – Full System: Based on the initial find-
ings, the complete cluster of eight RPIs was evaluated
and the data was accumulated in Table 4. The cluster
consisted of one master node and seven worker nodes.
CPU usage started out at about 30% and only showed
a slow increase as the number of cars within the sys-
tem was rising. Therefore, CPU/memory usage did
not seem to be the limiting factor. However, the in-
vocation time as well as the MRT were again surpris-
ingly high with the Function Invocation Time starting
out at 1.5 seconds and increasing to a value of over
2 seconds at only eight vehicles. The MRT values
are also fluctuating greatly as can be seen in Figure
4. Looking at these values, the bottleneck appears to
be the openFaas Function Invocation Time. Figure 5
shows that the Function Invocation Time takes up a
significant proportion of the overall MRT.
CLOSER 2020 - 10th International Conference on Cloud Computing and Services Science
308

5
10
15
0
1
2
3
# vehicles
time in seconds
FIT
Remainder of MRT
Figure 5: FIT for overall MRT - different no. of vehicles.
5.4 Performance Re-engineering
With the Function Invocation Time (FIT) as a signif-
icant factor in slowing down the system, changes to
the architecture of the application needed to be made
in order to improve the overall performance.
Figure 6: Refactored Architecture: communication be-
tween gatherer and vehicle services in the improved system.
The use of parallelism was increased by deploy-
ing more than one gatherer. Previously, a single gath-
erer was processing incoming messages in an asyn-
chronous way and calling the decision-function for
each message. This was a bottleneck since the num-
ber of messages that could be processed concurrently
was limited by the hardware. In the new version, the
gatherer itself is subject to scaling. An arbitrary num-
ber of gatherers can be deployed across the cluster.
Since the vehicles now need to be distributed across
the different gatherers, a new component was imple-
mented that computes a unique ID for each gatherer
at startup and exposes it via an openFaas function.
When a new vehicle is entering the system, it calls the
corresponding function once and is assigned a gath-
erer. Consequently, the vehicle publishes its infor-
mation to the MQTT topic of its designated gatherer.
OpenFaas alternates between the gatherers for each
new call by default. Figure 6 highlights the described
changes by emphasizing the communication between
the vehicle and gatherer services. When new gather-
ers are added or removed, a message is broadcasted
and all vehicles are being reassigned new gathers.
Additionally, since the FIT of the decision-function
seemed to be a major reason for the slow overall re-
sponse time, the decision-function was removed and
Table 4: Results for the standard set of metrics for a cluster
of eight RPIs using the original version of the system.
Vehicles Memory CPU MRT FIT
2 37.06 34.72 1.6 1.43
4 22.24 33.0 1.54 1.43
6 19.6 33.28 1.56 1.48
8 29.9 34.32 1.59 1.49
10 29.92 35.37 1.61 1.5
12 34.82 36.17 1.59 1.51
14 35.94 37.27 2.23 1.49
16 42.59 38.57 1.72 1.55
18 49.26 39.42 1.68 1.63
20 51.73 39.92 4.17 1.63
22 52.97 40.53 2.20 1.73
24 66.97 42.37 5.41 2.13
26 59.74 43.28 26.62 1.91
5
10
15
0
20
40
60
# vehicles
CPU Usage
Original version
Improved version
Figure 7: CPU Usage compared between the original and
improved (no openFaas function calls) versions.
its functionality was included as part of the gatherer.
Using this setup, it is no longer necessary to call an
openFass function for each received message and wait
for its return value. This demonstrates the value of ex-
perimental platform evaluation and subsequent refac-
toring. The aim here is to employ the concept of con-
tinuous experimentation in order to continuously im-
prove metrics, such as performance in this case.
5.5 Evaluation – Refactored
Architecture and Scalability
The experimental setup was similar to the previous
full system evaluation: a cluster of eight RPIs was
used. As discussed, the decision-making functionality
is included in the gatherer service, which can now be
scaled independently. Hence, there is no longer the
need to call the decision function for each message.
The results can be found in Tables 5 and 6. Con-
sidering these results, a significant improvement in
the overall Message Roundtrip Time can be noted.
The difference between the two versions can be
clearly seen by looking at Figure 8 and comparing the
MRT of both iterations of the system. This differ-
ence was recorded for different numbers of vehicles.
It seems to be growing exponentially. Between 16 and
24 vehicles, the MRT increases by over 300% for the
original version, while the MRT of the bundled ver-
sion only increases by about 8%. If we compare the
CPU usage, we see that the refactored system uses
Serverless Container Cluster Management for Lightweight Edge Clouds
309

Table 5: Results for the standard set of metrics for a cluster
of eight RPIs using the improved system. The FIT was not
measured since the decision function was removed.
Vehicles Mem Usage CPU Usage MRT FIT
2 2.92 36.53 0.02 -
4 3.29 37.02 0.025 -
6 3.89 37.90 0.029 -
8 5.48 38.41 0.028 -
10 5.81 39.37 0.17 -
12 5.17 39.78 0.028 -
14 6.98 40.07 0.028 -
16 4.2 40.33 0.025 -
18 4.5 40.67 0.025 -
20 4.94 41.1 0.027 -
22 5.19 41.43 0.028 -
24 5.74 41.7 0.027 -
26 5.99 42.14 0.028 -
Table 6: Same as in Table 5, here higher number of vehicles.
Vehicles Mem Usage CPU Usage MRT FIT
50 8.63 46.75 0.03 -
75 11.79 51.7 0.032 -
100 14.48 56.57 0.04 -
about 8-10% more of the CPU compared to the origi-
nal application. The additional computing power and
time needed to make a decision is neglectable when
compared to the significant overall MRT advantage.
The current set-up did not allow for more than 75
vehicles. The bottleneck appeared to be the network:
when trying to increase the number of vehicles be-
yond this, the network was unable to handle the mes-
sage volume that were exchanged, which resulted in
connections and packets being dropped continuously.
5.6 Overall Evaluation Analysis
Using a smaller cluster set-up (the calibration pilot),
it was possible to derive starting values for all vari-
ables. The overall evaluation shows that containeriza-
tion comes with a small performance loss compared
to traditional set-ups. However, the advantages of us-
ing our approach are generally more significant than
Figure 8: Comparing MRT - original and improved system.
the downsides. The evaluation indicates that server-
less function calls should be managed carefully since
they introduce network latency problems. Refactor-
ing the proposed solution to reduce the number of
necessary calls to openFaas functions resulted in a
significant increase in performance. The improved
version yields satisfying results in terms of hardware
consumption and performance (MRT) while the built-
in scaling algorithm scales the system as intended.
The network emerges as the limiting factor. Our set-
up was not able to process more than 75 vehicles at a
time. The CPU and memory usage numbers as well
as the steady, but slow increase of the MRT imply that
the hardware itself should be able process more. Fu-
ture improvement attempts could find network set-ups
that allow dependable services beyond the limits.
6 CONCLUSIONS
We introduced a containerized serverless edge cluster
management, implemented for a use case for a traffic
management system on a cluster of single-board de-
vices. The presented architecture is based on edge
computing principles, clusters of single-board de-
vices, microservices, serverless technology and auto-
scaling. The proposed architecture results in a recon-
figurable, scalable and dependable system that pro-
vides built-in solutions for common problems such as
service discovery and inter-service communication.
The implementation is a proof-of-concept with the
constraints of the environment playing a crucial factor
in the implementation. While we have used a traffic
management system for implementation, the architec-
ture itself is generic. Vehicles in the implementation
were only simulated, representing actors that contin-
uously produce data into the system.
The advantages of our solution are reusability,
scalability and interoperability. By using openFaas
beyond its documented boundaries, it was possible
to utilise the framework for inter-service communi-
cation as well as for monitoring. The bottleneck that
prevents the system from scaling even higher appears
to be the network infrastructure as well as the lim-
ited internal networking capabilities of the RPi. More
research in terms of network configuration and man-
agement would be here beneficial.
Future work could focus on a number of aspects
in addition to the network concern already addressed,
e.g., improving traffic management components to
drive them towards a more realistic behavior.
CLOSER 2020 - 10th International Conference on Cloud Computing and Services Science
310

REFERENCES
5G-CARMEN (2019). 5G-CARMEN - 5G for Con-
nected and Automated Road Mobility in the European
UnioN. https://www.5gcarmen.eu/.
Azimi, S., Pahl, C. and Shirvani, M. H. (2020). Parti-
cle swarm optimization for managing performance in
multi-cluster IoT edge architectures. In Intl Conf on
Cloud Computing and Services Science CLOSER.
Baldini, I., Castro, P. C., Chang, K. S., Cheng, P., Fink, S. J.,
Ishakian, V., Mitchell, N., Muthusamy, V., Rabbah,
R. M., Slominski, A., and Suter, P. (2017). Serverless
computing: Current trends and open problems. CoRR,
abs/1706.03178.
Ellis, A. (2018). Introducing stateless microservices for
openfaas. https://www.openfaas.com/blog/. Ac-
cessed: 2019-11-11.
Fang, D., Liu, X., Romdhani, I., Jamshidi, P. and Pahl, C.
(2016). An agility-oriented and fuzziness-embedded
semantic model for collaborative cloud service search,
retrieval and recommendation. In Future Generation
Computer Systems, 56, 11-26.
Gand, F., Fronza, I., Ioini, N. E., Barzegar, H. R., Azimi,
S., and Pahl, C. (2020). A fuzzy controller for self-
adaptive lightweight container orchestration. In Intl
Conf on Cloud Computing and Services Science.
El Ioini, N. and Pahl, C. (2018). Trustworthy Orchestration
of Container Based Edge Computing Using Permis-
sioned Blockchain. Intl Conf on Internet of Things:
Systems, Management and Security (IoTSMS).
Jamshidi, P., Pahl, C., Mendonca, N. C., Lewis, J., and
Tilkov, S. (2018). Microservices: The journey so far
and challenges ahead. IEEE Software, 35(3):24–35.
Jamshidi, P., Pahl, C., Chinenyeze, S. and Liu, X. (2015).
Cloud Migration Patterns: A Multi-cloud Service Ar-
chitecture Perspective. In Service-Oriented Comput-
ing - ICSOC 2014 Workshops. 6–19.
Jamshidi, P., Sharifloo, A., Pahl, C., Arabnejad, H., Met-
zger, A. and Estrada, G. (2016). Fuzzy self-learning
controllers for elasticity management in dynamic
cloud architectures. QoSA, 70–79.
Jamshidi, P., Pahl, C. and Mendonca, N. C. (2016). Man-
aging uncertainty in autonomic cloud elasticity con-
trollers. IEEE Cloud Computing, 50-60.
Jamshidi, P., Pahl, C. and Mendonca, N. C. (2017). Pattern-
based multi-cloud architecture migration. Software:
Practice and Experience 47 (9), 1159-1184.
Javed, M., Abgaz, Y. M. and Pahl, C. (2013). Ontology
change management and identification of change pat-
terns. Journal on Data Semantics 2 (2-3), 119-143.
Kiss, P., Reale, A., Ferrari, C. J., and Istenes, Z. (2018). De-
ployment of iot applications on 5g edge. In 2018 IEEE
International Conference on Future IoT Technologies.
Kritikos, K. and Skrzypek, P. (2018). A review of serverless
frameworks. In 2018 IEEE/ACM International Con-
ference on Utility and Cloud Computing Companion
(UCC Companion), pages 161–168.
Le, V. T., Pahl, C. and El Ioini, N. (2019). Blockchain Based
Service Continuity in Mobile Edge Computing. In 6th
International Conference on Internet of Things: Sys-
tems, Management and Security.
Melia, M. and Pahl, C. (2009). Constraint-based validation
of adaptive e-learning courseware. In IEEE Transac-
tions on Learning Technologies 2(1), 37-49.
Mendonca, N. C., Jamshidi, P., Garlan, D., and Pahl, C.
(2019). Developing self-adaptive microservice sys-
tems: Challenges and directions. IEEE Software.
openFaaS (2019). openfaas: Auto-scaling. https://docs.
openfaas.com/architecture/autoscaling/. Accessed:
2019-11-11.
Pahl, C. (2005). Layered ontological modelling for web
service-oriented model-driven architecture. In Europ
Conf on Model Driven Architecture – Found and Appl.
Pahl, C., Jamshidi, P., and Zimmermann, O. (2018). Archi-
tectural principles for cloud software. ACM Transac-
tions on Internet Technology (TOIT), 18(2):17.
Pahl, C., El Ioini, N., Helmer, S. and Lee, B. (2018). An ar-
chitecture pattern for trusted orchestration in IoT edge
clouds. Intl Conf Fog and Mobile Edge Computing.
Pahl, C. (2003). An ontology for software component
matching. International Conference on Fundamental
Approaches to Software Engineering, 6-21.
Pahl, C., Fronza, I., El Ioini, N. and Barzegar, H. R. (2019).
A Review of Architectural Principles and Patterns for
Distributed Mobile Information Systems. In 14th Intl
Conf on Web Information Systems and Technologies.
Samir, A. and Pahl, C. (2020). Detecting and Localizing
Anomalies in Container Clusters Using Markov Mod-
els. Electronics 9 (1), 64.
Scolati, R., Fronza, I., Ioini, N. E., Samir, A., and Pahl,
C. (2019). A containerized big data streaming archi-
tecture for edge cloud computing on clustered single-
board devices. In 9th International Conference on
Cloud Computing and Services Science.
Serverless (2019). Serverless framework. https://serverless.
com/. Accessed: 2019-11-13.
Steffenel, L., Schwertner Char, A., and da Silva Alves, B.
(2019). A containerized tool to deploy scientific ap-
plications over soc-based systems: The case of mete-
orological forecasting with wrf. In CLOSER’19.
Taibi, D., Lenarduzzi, V. and Pahl, C. (2019). Microservices
Anti-Patterns: A Taxonomy. Microservices - Science
and Engineering, Springer.
Taibi, D., Lenarduzzi, V., Pahl, C. and Janes, A. (2017).
Microservices in agile software development: a
workshop-based study into issues, advantages, and
disadvantages. In XP2017 Scientific Workshops.
Tata, S., Jain, R., Ludwig, H., and Gopisetty, S. (2017).
Living in the cloud or on the edge: Opportunities and
challenges of iot application architecture. In 2017
IEEE Intl Conf on Services Computing (SCC).
von Leon, D., Miori, L., Sanin, J., El Ioini, N., Helmer,
S. and Pahl, C. (2018). A Performance Exploration
of Architectural Options for a Middleware for Decen-
tralised Lightweight Edge Cloud Architectures. Intl
Conf Internet of Things, Big Data & Security.
von Leon, D., Miori, L., Sanin, J., El Ioini, N., Helmer, S.
and Pahl, C. (2019). A Lightweight Container Mid-
dleware for Edge Cloud Architectures. Fog and Edge
Computing: Principles and Paradigms, 145-170.
Serverless Container Cluster Management for Lightweight Edge Clouds
311
