
Experiments of a New Generation Points Strategy in a Multilocal Method
Amulya Baniya
1
, Rui Fernandes
2,3
a
and Florbela P. Fernandes
3 b
1
Instituto Polit´ecnico de Braganc¸a, Campus de Santa Apol´onia, Braganc¸a, Portugal
2
Faculdade de Engenharia da Universidade do Porto, Rua Dr. Roberto Frias, Porto, Portugal
3
Research Centre in Digitalization and Intelligent Robotics (CeDRI), Instituto Polit´ecnico de Braganc¸a,
Campus de Santa Apol´onia, Braganc¸a, Portugal
Keywords:
Points Generation, Derivative-free Method, Multistart, MCSFilter Method, Nonlinear Optimization.
Abstract:
Nonlinear programming problems appear frequently in industrial/real problems. It is important to obtain its
solution in the lowest time possible, since the company could benefit from this. Taking this into account, a
derivative free method (MCSFilter method) is addressed with a different strategy to generate the initial points
to start each local search. The idea is to spread more the points so that the code execution will require a shortest
amount of time when compared with the MCSFilter method execution. Some experiments were performed
with simple bounds problems, equality and inequality constraint problems, chosen from a set of well known
nonlinear problems. The results obtained were encouraging and with the new strategy the method needs less
time to obtain the global solution.
1 INTRODUCTION
Problems coming from different parts in engineering
or economics, among other areas, are very complex
and can be modeled as nonlinear programming prob-
lems (Floudas et al., 1999) or (Hendrix and G.-T´oth,
2010).
Sometimes the derivatives are not known, thus
it is important to use a method that allows us to
solve these problems without this knowledge. The
MCSFilter method is a derivative free method that is
able to treat discontinuous or non-differentiable func-
tions (Fernandes et al., 2013) — a kind of functions
that usually appear in these areas. This method is a
multilocal method meaning that it finds all the min-
imizers, local and global. The MCSFilter method
was already used to solve small engineering problems
(Amador et al., 2017) or (Amador et al., 2018).
The results obtained with the MCSFilter method
are quite satisfactory, nevertheless, the generation of
initial points is performed randomly. This means that
two or more points can be generated closely to each
other and converge to the same minimizer without
adding new valuable information to the method. The
idea is now to obtain a new strategy, to generate this
points, in such a way that they will be more spread
a
https://orcid.org/0000-0002-8611-7706
b
https://orcid.org/0000-0001-9542-4460
around all the search space, leading to a small num-
ber of functions evaluation (or less time) to obtain the
global minimizer. The paper is organized as follows:
in Section 2 a brief description of MCSFilter method
is given; in Section 3 the new strategy to generate the
initial points is presented; in Section 4 the numerical
results are shown and in Section 5 some conclusions
are performed.
2 MCSFilter METHOD
The MCSFilter method is a derivative free method
able to treat nonlinear and constraint problems based
on a multistart strategy coupled with a filter coordi-
nate search. For more details see (Kolda et al., 2003)
and (Fernandes et al., 2013). The exploration part
of the method is related with the multistart strategy,
meanwhile the exploitation is related with the deriva-
tive free local search procedure CSFilter, in order to
obtain all the solutions (local and global solutions).
The problem can be formulated in the usual way:
min f(x)
subject to g
j
(x) ≤ 0, j = 1,...,m
l
i
≤ x
i
≤ u
i
, i = 1,..., n
(1)
where, at least one of the functions f, g
j
: R
n
−→ R
is nonlinear and F = {x ∈ R
n
: g(x) ≤ 0, l ≤ x ≤ u}
Baniya, A., Fernandes, R. and Fernandes, F.
Experiments of a New Generation Points Strategy in a Multilocal Method.
DOI: 10.5220/0009386304030410
In Proceedings of the 9th International Conference on Operations Research and Enterprise Systems (ICORES 2020), pages 403-410
ISBN: 978-989-758-396-4; ISSN: 2184-4372
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
403

is the feasible region. Problems with general equal-
ity constraints can be reformulated in the above form
by introducing h(x) = 0 as an inequality constraint
|h(x)|−τ ≤ 0, where τ is a small positive relaxation
parameter.
The problem is rewritten as a bi-objective problem
aiming to minimize both, the objective function f(x)
and a nonnegativecontinuous aggregate constraint vi-
olation function θ(x) defined by
θ(x) = kg(x)
+
k
2
+ k(l−x)
+
k
2
+ k(x−u)
+
k
2
(2)
where v
+
= max{0, v}. Therefore, a minimizer will
be computed by the local search CSFilter to the bi-
objective optimization problem
min
x
(θ(x), f(x)) . (3)
When a multistart strategy is applied to obtain all
the solutions, some or all of the minimizers may be
found over and over again. To avoid convergence to a
previously computed solution, a clustering technique
based on the regions of attraction computation asso-
ciated with the local search procedure of previously
identified minimizers, y
i
, is defined as:
A
i
≡ {x ∈[l,u] : CSFilter(x) = y
i
}, (4)
where CSFilter(x) is the minimizer obtained when
the local search procedure CSFilter starts at point x.
The regions are built and the next local search is
performed, depending (in a probabilistic way) if the
initial point belongs to the region of attraction of some
minimizer found until the moment. The objective of
these regions of attraction is to avoid starting the local
procedure if, for a given point, the local search has a
big probability of converging to some previous deter-
mined minimizers.
Figure 1 illustrates the region of attraction of each
minimizer.
It is possible to see 4 minimizers and the initial
points used for each local search. The red line identi-
fies the first local search which converged first to each
minimizer; the magenta lines identify all the local
searches that converged to minimizers already found;
the dashed white lines identify all the initial points
that were discarded using the regions of attraction.
To be easier to understand which part is different
from the original version, it is presented the MCSFil-
ter algorithm with the new strategy, related with the
multistart part, Algorithm 1. In this algorithm lines 1,
2 and 5 substitute the random generation of points of
the original MCSFilter algorithm.
As stopping condition, the original MCSFilter al-
gorithm uses the estimate of the fraction of uncovered
space
P(n
min
) =
n
min
(n
min
+ 1)
n
loc
(n
loc
−1)
, (5)
3 4 5 6 7 8 9 10 11 12 13
3
4
5
6
7
8
9
10
11
12
13
Figure 1: Regions of attraction of four minimizers.
where n
min
is the number of recovered minimizers
after having performed n
loc
local search procedures.
The multistart algorithm then stops if P(n
min
) ≤ ε, for
a small ε > 0. The CSFilter algorithm is not presented
since it is the same as previously.
All the details about all the parameters inside the
original Algorithm 1 can be seen in (Fernandes et al.,
2013).
3 GENERATION OF INITIAL
POINTS
Taking into account the knowledge about the
MCSFilter algorithm it is possible to state that, with a
big frequency, there are many points generated close
to each other and, on the other side, there are parts
in the search space that do not have any point there.
The idea is to obtain a new way to generate the points
more spread around the search space.
According with (Hedar and Fukushima, 2006) the
interval between the bounds, for each coordinate, is
divided into 4 sub-intervals. In each sub-interval a
value will be generated for each coordinate based on
a probability that depends on which intervals the coor-
dinate has already been generated, and on a dispersion
parameter α ≥ 0, as it can be seen in Algorithm 2.
The number of points to be generated are defined
using 4 different rules. These rules are based in the
search space, given by the bounds and, also, based in
the fact that each interval is dividedinto 4 subintervals
and are defined as follows:
• RGP1: Considering ∆
i
= u
i
−l
i
the number of
points generated (T) is given by:
T =
n
∏
i=1
⌈∆
i
⌉, (6)
with ⌈·⌉ being the ceil function.
ND2A 2020 - Special Session on Nonlinear Data Analysis and Applications
404

Algorithm 1: MCSFilter algorithm with a new strategy of
generation of initial points.
Require: Parameter values; set Y
∗
=
/
0
†
, k = 1, t = 1;
1: Generate T points using Algorithm 2;
2: x is the first point generated from the T points;
3: Compute y
1
= CSFilter(x), R
1
= kx −y
1
k; set
r
1
= 1, Y
∗
= Y
∗
∪y
1
;
4: repeat
5: x is the next point generated from the T points;
6: Set o = argmin
j=1,...,k
d
j
≡ kx−y
j
k;
7: if d
o
< R
o
then
8: if the direction from x to y
o
is ascent then
9: Set p = 1;
10: else
11: Compute p = ρφ(
d
o
R
o
,r
o
);
12: end if
13: else
14: Set p = 1;
15: end if
16: if ζ
‡
< p then
17: Compute y = L(x); set t = t + 1;
18: if ky − y
j
k > γ
∗
A
min
, for all j = 1,...,k
§
then
19: Set k = k+1, y
k
= y, r
k
= 1, Y
∗
= Y
∗
∪y
k
;
compute R
k
= kx−y
k
k;
20: else
21: Set R
l
= max{R
l
,kx −y
l
k}
♮
; r
l
= r
l
+ 1;
22: end if
23: else
24: Set R
o
= max{R
o
,kx −y
o
k}; r
o
= r
o
+ 1;
25: end if
26: until the stopping rule is satisfied
—————————————————-
†
- Y
∗
is the set containing the computed minimizers.
‡
- ζ is a uniformly distributed number in (0,1).
§
- y /∈Y
∗
.
♮
- ky−y
l
k ≤ γ
∗
A
min
.
• RGP2: Since, for each variable, the interval is
divided into 4 equal parts then:
T = 4
n
. (7)
• RGP3: In this proposed rule the objective is to
combine both, RGP1 and RGP2:
T = 4(n −1)max(⌈∆⌉). (8)
• RGP4: This rule, the simpler one, is based only
in the number on variables:
T = 10n. (9)
It is also considered that:
• if T ≥ 1500 then T = 1500;
Algorithm 2: Initial Points Generation.
1: Initialization: the number of points T is defined
according with RGP
j
, j = 1,··· ,4.
2: repeat
3: ∆
i
= ub
i
−lb
i
is divided into 4 equal adjacent
intervals — basic intervals. A counter of num-
ber of occurrences is initialised for these basic
intervals.
4: a starting point is randomly generated within
∆
i
and its corresponding basic interval number
of occurrences is updated.
5: repeat
6: the current maximum number of points de-
fined in a basic interval, maxOcc, accounted
using all basic intervals is determined.
7: an auxiliar value is computed, by basic in-
terval, according with this rule:
aux(i) = α
maxOcc−Occ(i)
, with i = 1,...,4.
In this equation, Occ(i) represents the num-
ber of points in basic interval i.
8: Exception: if α = 0, for the basic intervals
that have a number of occurrences equal to
the maximum number of occurrences value,
the auxiliar value attributed is 1.
9: a new probability distribution is determined
using the auxiliary values:
prob(i) =
aux(i)
∑
4
i=1
aux(i)
, with i = 1,...,4.
10: the cumulative probability function of this
probability distribution is determined and is
used as threshold, in conjunction with a new
uniform random number generator that out-
puts values between 0 and 1, to define the
basic interval of the next point.
11: a random number is generated in the ba-
sic interval identified in the previous step to
generate the point. Its corresponding num-
ber of occurrences is updated.
12: until all values are defined in a single variable
13: until all values are defined for all the variables
14: assemble final points by using the coordinates
previously obtained.
• if T = 1 then T = 10n.
In order to visualize the influence of the value of
the dispersion parameter α and how it controls the
way the points are generated some remarks about the
algorithm should be made:
• if α = 0, the starting basic interval will always get
a probability of 1 and all others a probability of
0. This implies that the starting basic interval will
have all points — case of greater concentration of
points generation, as depicted in Figure 2.
Experiments of a New Generation Points Strategy in a Multilocal Method
405
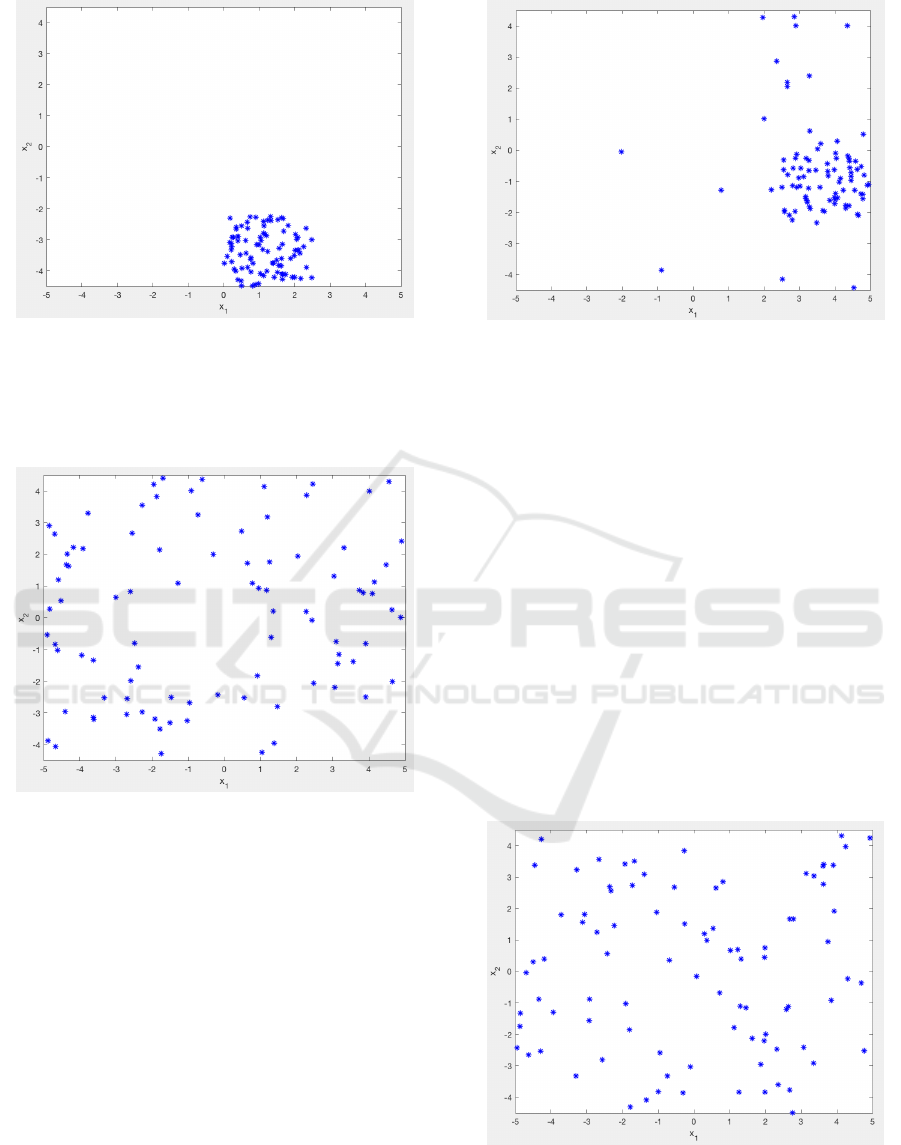
Figure 2: α = 0 and concentration of points.
• if α = 1, all basic intervals will be affected with
the same probability — case of equiprobability
between basic intervals to generate the next point.
One example is presented in Figure 3.
Figure 3: α = 1 and the points spread around the search
space.
• if 0 < α < 1, since aux(i) is a power of α related
to the number of points in the basic interval, inter-
vals with higher number of occurrences will get a
lower power of α, providing them with higher aux
values. A simulation of this scenario can be seen
in Figure 4.
This also means that the probability of achiev-
ing higher concentrated points increases inversely
with the value of α.
• if α > 1, given the relations used, intervals with
lower number of occurrences get higher aux val-
ues. A higher value of α increases more quickly
the value of the exponential distribution used for
the auxiliary values, thus, it implies:
– basic intervals with the maximum number of
occurrences have lower probability of being
Figure 4: α = 0.75 and still a concentration of points.
used in the point generation: higher value of
α ⇒ (more extreme) lower basic interval usage
probability.
– higher value of α, given the higher difference
between different powers of α tends to more
rapidly uniformize the number of occurrences
through all basic intervals. This will render a
situation similar to the case of α = 1 in terms
of points distribution as depicted in Figure 5,
however, there is one important difference be-
tween these two scenario: when α = 1 all inter-
vals are equiprobable, despite the present oc-
currences distribution; when α > 1 intervals
will have different probability values, being
equiprobable, related to the current number of
occurrences. Furthermore, the intervals with
the maximum number of occurrences will have
a much lower probability and this value de-
creases with the increase of the α value.
Figure 5: α = 10 and the points spread around the search
space.
ND2A 2020 - Special Session on Nonlinear Data Analysis and Applications
406

Table 1: Results obtained with the original MCSFilter.
Prob #min
avg
t
avg
(s)
P1 3 0,1649
P2 5,1 0,1584
P3 3,5 0,3196
P4 2,9 0,2510
P5 2 0,5393
P6 6,7 0,5354
P7 23,5 0,6864
P8 4 0,1434
P9 4 0,1819
P10 8 0,4270
P11 15,6 1,1576
P12 30 3,0336
P13 60,2 7,7436
P14 235 48,5530
P15 1,4 22,9458
P16 3,7 141,1000
4 NUMERICAL RESULTS
To analyze the performance of the MCSFilter algo-
rithm, a set of 16 test problems is used (see Table 6
and the reference therein for more details about each
problem). The set contains bound constrained prob-
lems, inequality and equality constrained problems,
multimodal objective functions, with one global and
some local, more than one global, and a unimodal op-
timization problem.
In order to compare the time needed by the origi-
nal version of the MCSFilter algorithm and the new
one, the original MCSFilter algorithm was run 10
times in a laptop Intel(R) Core i5-7200U CPU and
2.5GHz, using the same values presented in (Fernan-
des et al., 2013). In this version the points are ran-
domly generated and to stop the MCSFilter Algorithm
Equation 5 was used, with ε = 0,1.
These results are listed in Table 1. The first col-
umn shows the problems, the second shows the aver-
age number of minimizers found and the last column
shows the average time needed (in seconds).
Tables 2 - 5 list the same results as previously but
now to each new Rule inside Algorithm 2, such that
a comparison can be performed between the original
and the new strategy. Therefore, for each new 4 ways
to limit the generation of the initial points, the average
number of minimizers and the average time needed to
obtain the solutions is presented.
For the proposed MCSFilter algorithm version,
the stop condition is given by Equation 5 or if all T
points are used. All the other parameters remain equal
to the original algorithm. Related with Algorithm 2
Table 2: Results with the RGP1 rule in Algorithm 2.
Prob #min
avg
t
avg
(s)
P1 3 0,1336
P2 5,7 0,1475
P3 3,9 0,3374
P4 3 0,2445
P5 2 0,4688
P6 7,6 0,6444
P7 21,4 0,6313
P8 4 0,1402
P9 4 0,1549
P10 8 0,3964
P11 15,9 1,0837
P12 31,2 3,0002
P13 61,3 7,7158
P14 235,7 47,8652
P15 1 3,8995
P16 3 15,1904
and the α parameter, after some preliminary experi-
ments it was chosen α = 10.
If a comparison is made between Table 1 and Ta-
ble 2 it is possible to state that using Rule RGP1:
• there are 12 problems out of 16 for which the al-
gorithm takes less time to obtain an equal or larger
number of minimizers;
• there are 2 problems that take more time but the
average numberof minimizers found is larger than
the original;
• for problem P16 it takes less time but the average
number of minimizers (3) is smaller than the av-
erage number (3,7) from the original MCSFilter,
nevertheless the global is always obtained in all
10 runs.
• there is 1 problem in which the results obtained
are worst than the original ones (problem P7).
Considering now Table 3 and Rule RGP2, it is
possible to observe that:
• there are 10 problems out of 16 for which the al-
gorithm takes less time to obtain an equal or larger
number of minimizers;
• there are some problems that take more time but
the average number of minimizers found is larger
than the original.
• for problem P16 the global solution was obtained
only in six runs (out of 10).
To compare the original results with the ones ob-
tained using Rule RGP3, Table 4 lists the average val-
ues to all the problems.
As it is possible to observe:
Experiments of a New Generation Points Strategy in a Multilocal Method
407

Table 3: Results with the RGP2 rule in Algorithm 2.
Prob #min
avg
t
avg
(s)
P1 3 0,1240
P2 5,7 0,1501
P3 3,7 0,2561
P4 2,9 0,2580
P5 2 0,5681
P6 7,2 0,5330
P7 11,2 0,2198
P8 4 0,1315
P9 4 0,1402
P10 8 0,3907
P11 15,9 1,1509
P12 30,9 2,9382
P13 61,5 7,6835
P14 234,2 50,4519
P15 1 17,5457
P16 2,8 19,4789
Table 4: Results with the RGP3 rule in Algorithm 2.
Prob #min
avg
t
avg
(s)
P1 3 0,1428
P2 5,4 0,1443
P3 3,9 0,3793
P4 3 0,2013
P5 2 0,4322
P6 6,9 0,4776
P7 21,3 0,6254
P8 4 0,1454
P9 4 0,1531
P10 8 0,4701
P11 15,9 1,1923
P12 30,8 3,0346
P13 60,5 7,7378
P14 167 24,6586
P15 1,3 6,6261
P16 2,8 13,4124
• there are 8 problems out of 16 for which the algo-
rithm takes less time to obtain an equal or larger
number of minimizers;
• there are three problems that take more time but
the average number of minimizers found is larger
than the original.
• for problem P16 the global minimizer was found
only in 5 runs (out of 10).
• for problem P14, the algorithm (with this rule)
found a small number of minimizers, being the
worst result till now, considering all rules.
Finally, Table 5 shows the results obtained with
Rule RGP4.
Comparing these results with Table 1:
Table 5: Results with the RGP4 rule in Algorithm 2.
Prob #min
avg
t
avg
(s)
P1 3 0,1340
P2 5,5 0,1434
P3 3,7 0,2710
P4 2,8 0,2206
P5 2 0,5082
P6 6,8 0,5034
P7 12,9 0,2428
P8 4 0,1328
P9 4 0,1374
P10 8 0,3804
P11 15,5 0,9803
P12 26,7 1,8912
P13 39,3 3,2597
P14 69,2 7,6520
P15 1,4 15,7886
P16 2,71 14,7141
• there are 10 problems out of 16 for which the al-
gorithm takes less time to obtain an equal or larger
number of minimizers;
• for the remaining problems the results are worst
than the ones obtained with the original algorithm.
• for problem P16 the global minimizer was found
only in 8 runs (out of 10).
Problem P15 has the same behaviour with almost
all rules: finds a number of minimizers greater than
1. This happen because the local search stops before
reaching the minimizer.
Globally, the MCSFiter algorithm with the mew
points generation strategy needs less time than the
original version to find the minimizers, regardless of
the used rule to control the number of points to be
generated, which is promising.
5 CONCLUSIONS
MCSFilter ia a multilocal method able to find local
and global solutions of a nonlinear problem. The orig-
inal method is based on a multistart strategy coupled
with a coordinate search filter methodology. Inside
the multistart part and in the original method, the ini-
tial points were randomly generated. Sometimes, the
points generated were too close of each other leading
to more calls of the local procedure without adding
more information to the solution. The objective of
the new strategy is to spread as much as possible the
points so that it will be possible to avoid some calls
of the local procedure and, hence, taking less time
to obtain the solution. In order to test the efficiency
of this approach (Algorithm 2), four different rules
ND2A 2020 - Special Session on Nonlinear Data Analysis and Applications
408

were used to limit the number of points to be gener-
ated. The dispersion or the concentration of the points
around the search space depends on the α parameter.
The new algorithm was tested with all the rules
using, always, a benchmark of test problems — a set
of 16 problems (bound, equality and inequality con-
straint problems).
This preliminary work shows that Algorithm 2
with rules RGP1, RGP2 and RGP4 presents better re-
sults than with RGP3. For bounded problems the re-
sults are better than the original method but the prob-
lems with equality or inequality constraints have a dif-
ferent behaviour.
Currently, the method generates all points first and
uses these generated points in MCSFilter algorithm.
That can cause time inefficiency for large dimension
problems. Taking this issue into account, individual
point generation, using a similar generation strategy,
should be investigated.
ACKNOWLEDGEMENTS
This work has been supported by FCT — Fundac¸˜ao
para a Ciˆencia e Tecnologia within the Project Scope:
UIDB/5757/2020.
REFERENCES
Amador, A., Fernandes, F. P., Santos, L. O., and Roma-
nenko, A. (2017). Application of mcsfilter to esti-
mate stiction control valve parameters. AIP Confer-
ence Proceedings, 1863(1):270005.
Amador, A., Fernandes, F. P., Santos, L. O., Romanenko,
A., and Rocha, A. M. A. C. (2018). Parameter estima-
tion of the kinetic α-pinene isomerization model us-
ing the mcsfilter algorithm. In Gervasi, O., Murgante,
B., Misra, S., Stankova, E., Torre, C. M., Rocha, A.
M. A., Taniar, D., Apduhan, B. O., Tarantino, E.,
and Ryu, Y., editors, Computational Science and Its
Applications – ICCSA 2018, pages 624–636, Cham.
Springer International Publishing.
Fernandes, F. P. (2015). Programac¸˜ao n˜ao linear inteira
mista e n˜ao convexa sem derivadas. PhD Thesis, Uni-
versidade do Minho, Braga.
Fernandes, F. P., Costa, M. F. P., and Fernandes, E. M. G. P.
(2013). Multilocal programming: A derivative-free
filter multistart algorithm. In Murgante, B., Misra,
S., Carlini, M., Torre, C. M., Nguyen, H.-Q., Taniar,
D., Apduhan, B. O., and Gervasi, O., editors, Compu-
tational Science and Its Applications – ICCSA 2013,
pages 333–346, Berlin, Heidelberg. Springer Berlin
Heidelberg.
Floudas, C., Pardalos, P., Adjiman, C., Esposito, W.,
Gumus, Z., Harding, S., Klepeis, J., and Meyer,
C.A.and Schweiger, C. (1999). Handbook of Test
Problems in Local and Global Optimization. Kluwer
Academic Publishers.
Hedar, A.-R. and Fukushima, M. (2006). Derivative-free
filter simulated annealing method for constrained con-
tinuous global optimization. Journal of Global Opti-
mization, 35(4):521–549.
Hendrix, E. M. T. and G.-T´oth, B. (2010). Introduction to
Nonlinear and Global Optimization. Springer New
York, New York, NY.
Kolda, T. G., Lewis, R. M., and Torczon, V. (2003). Op-
timization by direct search: New perspectives on
some classical and modern methods. SIAM Review,
45(3):385–482.
APPENDIX
The set of problems used to test the new strategy to
generate the initial points were taken from (Fernan-
des, 2015). In Table 6, the first column shows the
problem, the second column shows the number of
known minimizers (in the literature), the third column
shows the designation of each problem in (Fernandes,
2015) and the references therein.
Table 6: Information about the problems, number of mini-
mizers and notation.
Prob min known Prob in (Fernandes, 2015)
P1 3 (A.1)
P2 6 (A.2)
P3 4 (A.3)
P4 3 (A.4)
P5 2 (A.5)
P6 10 (A.8)
P7 760 (A.9)
P8 4 (A.11)
P9 4 (A.12)
P10 8 (A.13)
P11 16 (A.14)
P12 32 (A.15)
P13 64 (A.16)
P14 256 (A.17)
P15 1 (A.19)
P16 4 (A.31)
The set of problems used to test the new algorithm
is as follows:
P1:
min f(x) ≡
x
2
−
5.1
4π
2
x
2
1
+
5
π
x
1
−6
2
+
+10
1−
1
8π
cos(x
1
) + 10
s.t −5 ≤x
1
≤ 10
0 ≤ x
2
≤ 15
Experiments of a New Generation Points Strategy in a Multilocal Method
409

P2:
min f(x) ≡
4−2.1x
2
1
+
x
4
1
3
x
2
1
+ x
1
x
2
+
−4(1−x
2
2
)x
2
2
s.t −2 ≤x
i
≤ 2, i = 1,2
P3:
min f(x) ≡ (1+ (x
1
+ x
2
+ 1)
2
×
(19−14x
1
+ 3x
2
1
−14x
2
+ 6x
1
x
2
+ 3x
2
2
)) ×
×(30+ (2x
1
−3x
2
)
2
×
×(18−32x
1
+ 12x
2
1
+ 48x
2
−36x
1
x
2
+ 27x
2
2
))
s.t −2 ≤x
i
≤ 2, i = 1,2
P4:
min f(x) ≡ −
4
∑
i=1
c
i
exp
−
3
∑
j=1
a
ij
(x
j
− p
ij
)
2
!
s.t 0 ≤ x
i
≤ 1,i = 1,2, 3
with
a =
3 10 30
0.1 10 35
3 10 30
0.1 10 35
, c =
1
1.2
3
3.2
p =
0.3689 0.117 0.2673
0.4699 0.4387 0.747
0.1091 0.8732 0.5547
0.03815 0.5743 0.8828
P5:
min f(x) ≡ −
4
∑
i=1
c
i
exp
−
6
∑
j=1
a
ij
(x
j
− p
ij
)
2
!
s.t 0 ≤ x
i
≤ 1,i = 1,... ,6
with
a =
10 3 17 3.5 1.7 8
0.05 10 17 0.1 8 14
3 3.5 1.7 10 17 8
17 8 0.05 10 0.1 14
, c =
1
1.2
3
3.2
,
p =
0.1312 0.1696 0.5569 0.0124 0.8283 0.5886
0.2329 0.4135 0.8307 0.3736 0.1004 0.9991
0.2348 0.1451 0.3522 0.2883 0.3047 0.6650
0.4047 0.8828 0.8732 0.5743 0.1091 0.0381
P6:
min f(x) ≡ −−
10
∑
i=1
1
(x−a
i
)(x−a
i
)
T
+ c
i
s.t 0 ≤ x
i
≤ 10, i = 1,..., 4
with
a =
4 4 4 4
1 1 1 1
8 8 8 8
6 6 6 6
3 7 3 7
2 9 2 9
5 5 3 3
8 1 8 1
6 2 6 2
7 3.6 7 3.6
, c =
0.1
0.2
0.2
0.4
0.4
0.6
0.3
0.7
0.5
0.5
P7:
min f(x) ≡
5
∑
i=1
icos((i+ 1)x
1
+ i)
!
×
5
∑
i=1
icos((i+ 1)x
2
+ i)
!
s.t −10 ≤ x
i
≤ 10, i = 1,2
P8:
min f(x) ≡
n
∑
i=1
sin(x
i
) + sin
2x
i
3
s.t 3 ≤x
1
≤ 13, 3 ≤ x
2
≤ 13
P9 (n = 2), P10 (n = 3),
P11 (n = 4), P12 (n = 5),
P13 (n = 6), P14 (n = 8):
min f(x) ≡
1
2
n
∑
i=1
x
4
i
−16x
2
i
+ 5x
i
s.t − 5 ≤x
i
≤ 5,i = 1,··· ,n
P15:
min f(x) ≡ −(
√
n)
n
n
∏
i=1
x
i
s.t
n
∑
i=1
x
2
i
−1 = 0
0 ≤ x
i
≤ 1,i = 1,··· ,n n = 2
P16:
min f(x) ≡ 4−(x
1
−1)
2
−x
2
2
s.t (x
1
+ 5)
2
+ (x
2
−5)
2
−100 ≤ 0
−x
1
+ 8x
2
−11 ≤ 0
x
1
+ 4x
2
−7 ≤ 0
6x
1
+ 4x
2
−17 ≤ 0
0 ≤ x
1
≤ 2.5, 0 ≤ x
2
≤ 2
ND2A 2020 - Special Session on Nonlinear Data Analysis and Applications
410
