
Optimal Sensors Positioning to Detect Forest Fire Ignitions
Thadeu Brito
1 a
, Ana I. Pereira
1,2 b
, Jos
´
e Lima
1,3 c
, Jo
˜
ao P. Castro
4 d
and Ant
´
onio Valente
3,5 e
1
Research Centre in Digitalization and Intelligent Robotics (CeDRI), Instituto Polit
´
ecnico de Braganc¸a, Braganc¸a, Portugal
2
Algoritmi Research Centre, University of Minho, Campus de Gualtar, Braga, Portugal
3
INESC TEC, INESC Technology and Science, Porto, Portugal
4
CIMO - Centro de Investigac¸
˜
ao da Montanha, Instituto Polit
´
ecnico de Braganc¸a, Braganc¸a, Portugal
5
Engineering Department, School of Sciences and Technology, UTAD, Vila Real, Portugal
{brito, apereira, jllima, jpmc}@ipb.pt, avalente@utad.pt
Keywords:
Wildfires, Regional Climate, Forest Fire Ignition, Ignition Detection.
Abstract:
Forests have been harassed by fire in recent years. Whether by human action or for other reasons, the burned
area has increased harming fauna and flora. It is fundamental to detect an ignition early in order to firefighters
fight the fire minimizing the fire impacts. The proposed Forest Monitoring System aims to improve the nature
monitoring and to enhance the existing surveillance systems. A set of innovative operations is proposed that
will allow to identify a forest ignition and also will monitor the fauna. For that, a set of sensors are being
developed and placed in the forest to transmit data and identify forest fire ignition. This paper addresses a
methodology that identifies the optimal positions to place the developed sensors in order to minimize the fire
hazard. Some preliminary results are shown by a stochastic algorithm that spread points to position the sensor
modules in areas with a high risk of fire hazard.
1 INTRODUCTION
The project Forest Alert Monitoring System (SAFe)
proposes to create and execute a set of innovative op-
erations to minimize the alert time of forest fires ig-
nitions. Consequently, these actions will contribute
to the existing surveillance systems, helping the civil
protection teams to decide about the development ac-
tions.
In this sense, the SAFe system proposes an intel-
ligent procedure for monitoring situations of poten-
tial forest risk. The developed system, both hardware
and software, combines distributed standalone sensor
modules that will acquire and transmit several rele-
vant data for efficient characterization of existing for-
est conditions. According to (Aslan et al., 2012) this
information, combined with a system based on arti-
ficial intelligence, will allow the efficient and intelli-
gent analysis of the data, promoting the creation of
warnings of dangerous situations by warning several
surveillance agents (for example, firefighters, civil
a
https://orcid.org/0000-0002-5962-0517
b
https://orcid.org/0000-0003-3803-2043
c
https://orcid.org/0000-0001-7902-1207
d
https://orcid.org/0000-0003-0647-8892
e
https://orcid.org/0000-0002-5798-1298
protection or town hall). Additionally, all this infor-
mation and analysis will be made available through a
web platform based on a graphical interface.
This proposal arises from the diagnosis of the un-
reliability of observation towers managed by human
operators, which led to the testing of several technolo-
gies to improve detection capability, such as the use
of fixed or mobile surveillance cameras in the visible
and infrared band (Alkhatib, 2014). The accuracy of
these systems is affected by terrain, time of day and
weather conditions such as cloudiness, light reflection
and smoke from industrial or social activities.
This work presents a methodology to identify the
ideal positions to place the developed sensor modules
in order to minimize the fire hazard. The data to eval-
uate the fire risk was obtained from national environ-
mental agencies. Based on these data it was proposed
a method to identify possible points in the Study Area
with a high risk of the forest fire.
This paper is organized as follows. After an intro-
duction in Section 1, the system architecture is pre-
sented in Section 2. Section 3 shows the selected area
to address the study and Section 4 describes the sen-
sor modules that will be spread in the forest to collect
the data. Section 5 presents the LoRaWAN architec-
ture while the preliminary results are demonstrated in

Section 6. The conclusions and some future work are
presented in Section 7.
2 SYSTEM ARCHITECTURE
Many applications and tools need to be combined to
develop the forest monitoring system as well as the
entire process involved (Singh and Sharma, 2017).
Developing a strategy for joining all tools and appli-
cations is also of high importance. As a result, Fig-
ure 1 illustrates in a simplified scheme the main com-
ponents of the entire SAFe project system. The fol-
lowing topics list the points indicated in Figure 1:
• (1) Study Area: Region to be determined for the
implementation of sensor modules.
• (2) Sensor Modules: the set of sensors that make
the acquisition of forest data.
• (3) LoRaWAN Gateway: Device that receives
data from each sensor module scattered within the
study area.
• (4) Internet: Internet communication that will fa-
cilitate real-time viewing.
• (5) LoRa Communication: LoRa-based radio
frequency communication to European Union
standards (Zhang et al., 2009).
• (6) Server: Component that will store all col-
lected data, where the artificial intelligence sys-
tem will also be developed to correlate data from
sensor modules with external data (local scale
real-time fire hazard indexes, weather data, avail-
ability fuel content and moisture content of the
vegetation).
• (7) Control Center: Alerts for hazardous situa-
tions or forest fire ignitions, alert notifications are
tailored to each surveillance agent in the region.
• (8) External Data: Provided by national envi-
ronmental forecasting, risk and disaster response
agencies, as well as local entities.
Figure 1: Illustration of the system architecture.
Among all the tools and applications developed by
the SAFe project, this work will focus on the Study
Area. This is outlined in Section 3.
3 STUDY AREA
The application of sensor modules for forest data ac-
quisition will be implemented in the Braganc¸a region,
in the Serra da Nogueira area, as shown in Figure 2.
Due to the characteristics of this forest, spreading the
sensor modules across the region would be chaotic
and hard to understand the data (Lloret et al., 2009).
Therefore, it is necessary to develop a strategy to
place the sensor modules. The chosen points must
consider the data provided by the national environ-
mental agencies.
Figure 2: Geographic localization of Serra da Nogueira.
Data obtained by (Copernicus, 2019).
Some factors are deterministic for the choice of
these points, such as soil occupation, history and es-
timation of areas at flame hazard, areas that have
been burned over the years, terrain elevation and for-
est density, among others. For the analysis of these
factors, QGIS software (QGIS, 2019) is used as a vi-
sualization base and geographic data are provided by
Copernicus (Copernicus, 2019). The coordinate sys-
tem has the ETRS89/PT-TM06 (EPSG:3763) UTM
Zone 29N standard with Mercator Transverse Univer-
sal projection, the unit of measurement used is in me-
ters. Thus, it is possible to develop a methodology
that respects the characteristics of the Study Area ac-
cording to the range of sensor modules, which is de-
scribed in the following section.

4 SENSOR MODULES
There are multitude of flame sensors on the market,
the type of products found can be based on image
analysis (cameras), gas detection (smoke detector),
heat change (thermal cameras), radiation wave spec-
trum among the others. However, some methods have
disadvantages during their application. For exam-
ple, image analysis to detect fire ignitions may con-
tain human failures (Chen et al., 2004), smoke sen-
sors have high energy consumption (Baranov et al.,
2015), and thermal cameras have a high installation
cost (Katayama et al., 2009). Because of this, the
development of sensor modules is based on low-cost
sensors through radiation detection.
Figure 3 shows the prototype design of a sensor
module. Figure 3a describes the sensor module box
whereas Figure 3b describes the components. The
central element is the Arduino Uno (1) which through
LoRa communication (2) sends data from five in-
frared radiation sensors (3), temperature and humidity
sensors (4), UV index (5), and soil moisture (6). The
box is 100 mm long, 70 mm wide and 72 mm high. It
is made in a 3D printer, so that printing did not waste
filaments with supports. It is also water-resistant.
(a) Sensor module simulation
(b) Sensor module description
Figure 3: Prototype design of a sensor module.
All sensors described are used in a standard man-
ner, i.e. without any change in the method suggested
by the manufacturers. Therefore, the box can be pro-
duced and assembled for the first analysis. The final
sensor module box is presented in Figure 4.
Figure 4: Real sensor module.
5 COMMUNICATION SYSTEM
LoRa (Long Range) is the adopted protocol to estab-
lish the connection between sensors and the central
servers. More details of the communication system
can be found at (Adorno et al., 2019). LoRa is a
wide-area network technology that has been driven
by the IoT (Internet of Things) and thus is low-power
consumption devices (it enables long-range transmis-
sions of about 10 km in rural areas). It is uses spread
spectrum modulation techniques derived from chirp
spread spectrum on license-free sub-gigahertz radio
frequency bands. The developed wireless sensors net-
work uses the 868 MHz, one of the standard fre-
quencies for LoRa in Europe. On the upper network
layer of LoRa, LoRaWAN is one of several protocols
that were developed to access cloud-based services.
It manages the communication between LoRaWAN
gateways and end-node devices. In fact, the Indus-
try 4.0 boosted the IoT and IIoT (Industrial Internet
of Things) that makes use of LoRaWAN in several
areas, such as Smart Cities, agriculture and logistics
among the others.
Figure 5 shows the architecture of the LoRaWAN.
The nodes, through LoRa, connect to the gateways
that send the acquired data to the application server
where the processing will be done. At the proposed
system, the ignition detection should be done.
6 PRELIMINARY RESULTS
Before placing the detection prototype in the forest,
some tests are required to perform in a controlled en-
vironment. Lab testing is important to ensure that the
prototype is able to acquire data and send it remotely.
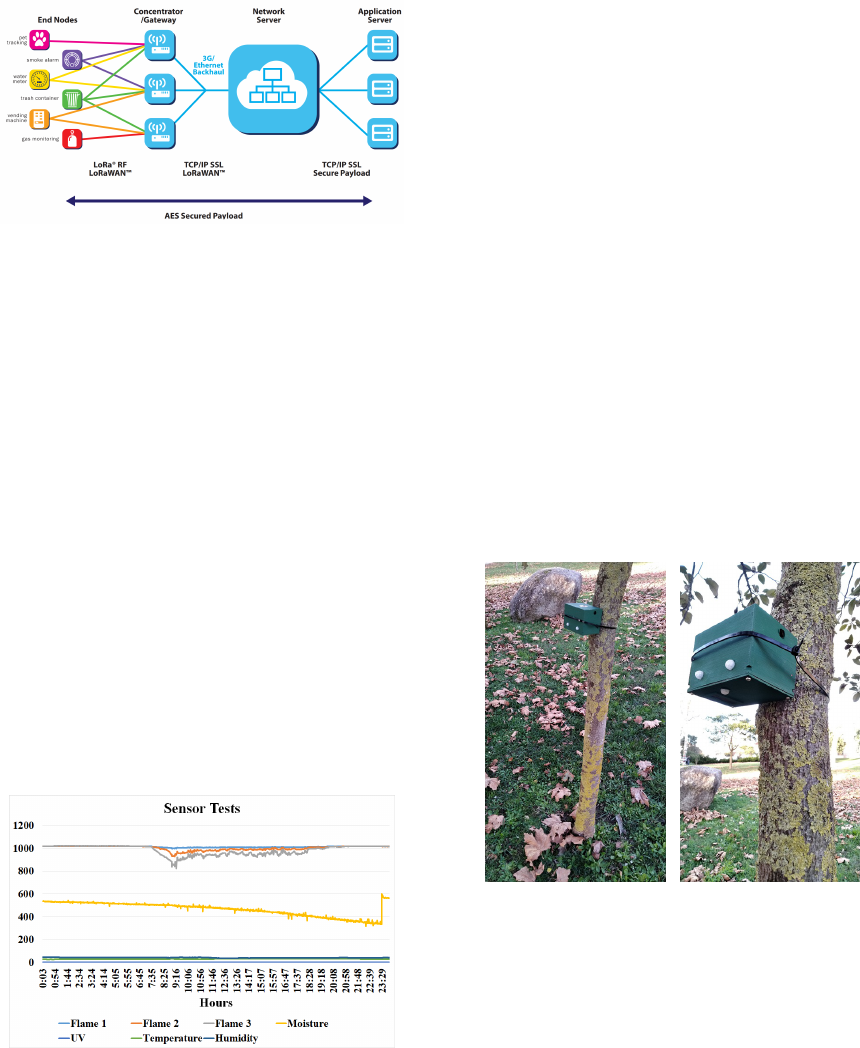
Figure 5: LoraWAN architecture. From (LoRa Alliance
Technical Marketing Workgroup, 2019).
This avoids possible communication failures as well
as some false alarms. In parallel, after some short
analysis made from the data obtained by (Copernicus,
2019), it was possible to establish some parameters
for choosing the locations that will receive the sen-
sor modules. The following subsections describe the
results obtained regarding lab testing and geographic
information.
6.1 The SAFe Box
After all the design, 3D printing and prototype assem-
bly, the first evaluation is to determine if the sensors
can function without interruptions. Then, the proto-
type was turned on for 30 days collecting data within
the laboratory with a 2-second collection interval. All
data were recorded without interruption, ie all sen-
sors were able to collect data at any time of the day
and without large peak oscillations. Due to a large
amount of data, Figure 6 shows only data collected in
a single day.
Figure 6: Chart from the collected data in one day. Values
are dimensionless since the output of sensors are presented
after a 10 bit Analog to digital conversion.
In the data acquisition chart presented in Figure 6,
it is possible to establish the minimums and maxi-
mums values of the flame sensors, where values have
ranged from 0 to 1023 (values from Arduino UNO
analog input). When the sensor is close to the flame,
the values tend to be close to 0. On the other hand,
when the sensor moves away from the flame, the val-
ues tend to approach 1023. The sensitivity of the sen-
sor varies with distance, intensity and flame volume.
By simulating the forest fire ignition with a candle,
it is possible to detect the presence of fire at about 5
m. The same process occurs for the soil moisture sen-
sors, that is, when the soil is wet the acquired data are
close to 0 and when the soil is dry the values are close
to 1023. The UV index sensor provided low values
due to the lack of light exposure once the tests were
performed indoors.
With the first analysis, it was observed that the
sensors did not suffer interruptions in data collection,
so the use of LoRa communication becomes viable
for the SAFe project approach. Then, the second anal-
ysis evaluates prototype fixation in real situations, that
is, being fixed to a tree trunk in the Study Area region.
Figure 7 shows the mounting and placement of sen-
sors on the stem of the tree. Note that the orientation
of the sensors is free, that means there are no barri-
ers to the capture of infrared spectra. Another factor
is wireless, all data collection was done with LoRa
communication.
(a) Prototype fixation. (b) Placement of sensors.
Figure 7: SAFe box acquiring data from Serra da Nogueira
forest.
As mentioned earlier, installing modules on all
tree trunks in a forest can become a daunting and
costly task. Finding the ignition point of fire can dra-
matically slow down the work of this task. Therefore,
the following subsection 6.2 demonstrates the strat-
egy for finding the highest fire risk points.
6.2 Fragments of Study Case
The total coverage area of the monitoring system is
expected to be a radial 10 km, so installing the mod-
ules with a distance of 5 m between them along this
circular 10 km area will be chaotic and laborious. To
solve the problem of territorial extension of 10 km
not becoming chaotic for data collection modules and
communication, it was determined that a possible ap-
proach is to separate the whole terrain into small frag-
ments. These fragments will be divided into a maxi-
mum of 1 km of diameter. In this way, it is possible
to understand the critical points of each fragment, to
position the sensors according to local resources and
to prepare the communication infrastructure.
Before considering the total fragmentation to 10
km, it is necessary to study the region according to
some parameters that contribute to the likelihood of
forest fires and then to define the best central point
to start the study. This central point should contain
an intersection area between the parameters that con-
tribute to the likelihood of forest ignition. The type of
soil occupation contributes to the incidence of wild-
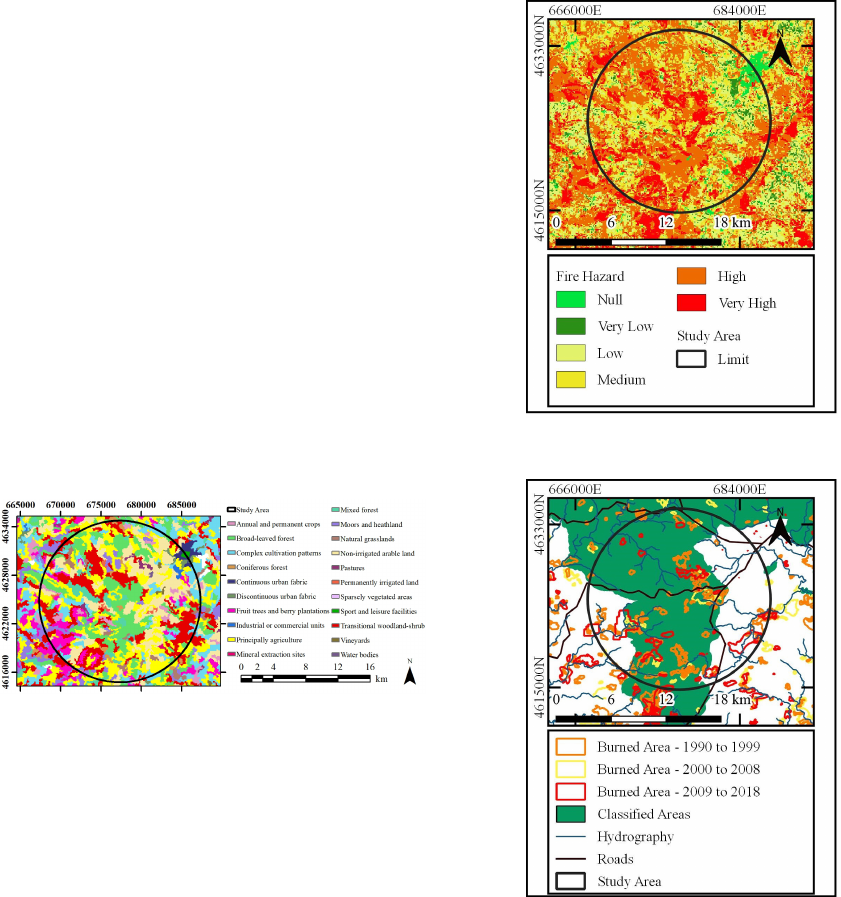
fire (Verde, 2010), as shown in Figure 8 (Braganc¸a
region has a mixed occupation).
Figure 8: Different type of soil occupation activities. Data
obtained by (Copernicus, 2019).
Particularly, it is important to analyse the data
of transitional woodland-shrub, non irrigated arable
land, broad-leaved forest, fire hazard, the history of
the burned area over the last years, the soil relief and
tree density among others. With the analysis made
from Figure 9, it is possible to notice this relationship
between the type of land occupation with the fire haz-
ard estimate and the burned areas over the last years
(comparing Figure 9a with Figure 9b).
Since the relief interferes with soil moisture, the
vegetation is drier in higher altitudes and conse-
quently prone to ignition of flames. Figure 10a and
Figure 10b demonstrate the occurrence of a high for-
est density in the high altitude regions. Therefore, the
center point should also contain a high altitude rela-
tive to the other points within 10 km along with a high
forest density.
By comparing the data displayed in QGIS, shown
in Figures 9 and 10, it is possible to determine some
points that comply with the parameters that increase
the likelihood of forest fire. The central region was
(a) Fire Hazard. Data obtained by (ICNF,
2019).
(b) Burned areas over the last years. Data
obtained by (Copernicus, 2019).
Figure 9: The Study Area with the fire risk estimate data
and the burned areas information. Data obtained by (Coper-
nicus, 2019).
defined with coordinates (105327, 232506) and alti-
tude near 1050 m, shown by Figure 11, in Serra da
Nogueira.
From this central point as a reference, the Fire
Hazard layer is activated and by selecting between the
values 0 and 5 it is possible to choose only the regions
of greatest interest, i.e. the regions with danger values
4 and 5. Thus, some regions are not considered for the

(a) Soil relief. Data obtained by (Coperni-
cus, 2019).
(b) Tree cover density. Data obtained by
(Copernicus, 2019).
Figure 10: The Study Area Figure presents the soil relief
with forest density in the Serra da Nogueira. Data obtained
by (Copernicus, 2019).
selection of place the sensor modules, which makes
the process a little less chaotic. Figure 12 demon-
strates the fire hazard layer at the boundaries of the
10 km radius from the center point.
Figure 12 addresses 1 km region around the de-
fined center point, shown in Figure 13a. The pre-
sented area can be zoomed in and the developed al-
gorithm can be applied to have as base the fire hazard
Figure 11: Central point in Braganc¸a region.
Figure 12: Fire hazard layer along the Study Area. Data
obtained by (ICNF, 2019).
map. The data to feed the algorithm was extracted
from the 1 km radius fire hazard layer from the center
point, presented in Figure 13b. As already mentioned,
values between 0 and 3 do not present great possibil-
ities for forest ignition, so only regions with values 4
and 5 are selected (Figure 13c).
The selected regions are transformed into polygon
formats since QGIS cannot access the data in Raster
format. Then each region generates a set of polygons
that are entered separately in the random point inser-
tion algorithm. For the distribution of random points,
it was set as 10000 maximum points for each poly-
gon and with a distance between each point of 5 m.
The operation of random point distribution is shown
in Algorithm 1.
After the algorithm determines the location of the
random points, a point mask is created over the poly-
gons that have been inserted as a fastening space. Fig-
ure 14 shows the result of this mask over the region
with hazard values 4 and 5. Note that in both Fig-
ure 14a and Figure 14b the entire fire hazard region
has been completely populated, which validates the
approach of the implemented algorithm.

(a) Study Area Fragment. (b) Fire hazard layer along
the Fragment.
(c) Selected regions with High and Very High levels.
Figure 13: Sequence of images demonstrating the selection
of regions with the highest risk of forest ignition within the
Study Area Fragment. Data obtained by (ICNF, 2019).
Algorithm 1: Random insertion points.
Initialize layer with polygons
p ← Set the maximum amount of points
d ← Set the minimum distance between each point
argmaxID ← Length of amount of polygons
f polygon ← Number of full polygon
while f polygon ! = argmaxID do
if polygon selected has < p and free space then
Spread a random points inside polygon for
each d m
else if show a debug message then
Target polygon as full
Get another polygon.
At the end of each presented Algorithm run, the
amount of time is reported in log format. It is also
collected from each generated mask the total random
points entered. This information is shown in the Ta-
ble 1.
Table 1: Results of the algorithm.
Layer Points Time [s]
Region with fire hazard values 4 24 601 460.30
Region with fire hazard values 5 18 482 464.16
By zooming the region a bit more, it can be found
a better distribution of the points, as shown in the set
(a) Points generated for regions with fire hazard
values 4.
(b) Points generated for regions with fire hazard
values 5.
Figure 14: Mask of points generated by the Algorithm 1
according to each region inserted as a fixation space.
of images of Figure 15. When using the QGIS mea-
surement tool, it is noted that the points are 5 m away
to each other and are also limited by the chosen re-
gions. These identified points will be the candidates
to place a sensor module to acquire the data.
7 CONCLUSIONS AND FUTURE
WORK
Monitoring forests can warn of possible fire ignition
that early detected help combat teams to minimize
fire impacts. The presented Forest Monitoring System
aimed to contribute to support the actual surveillance
systems by implementing a set of innovative opera-
tions that allow to identify a forest ignition based on
a set of sensors positioned in the forest. This work
presented a methodology to propose a set of locations
to install the sensor boxes. The results are promis-
ing since the data gathered from the installed sensors
boxes prototypes are operational. Moreover, a first
version of the prototype sensor box was developed,
tested and validated in laboratory and real scenarios
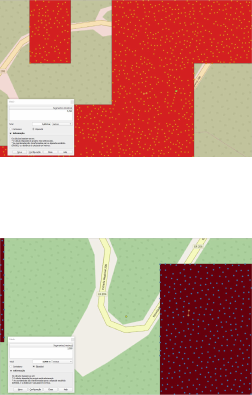
(a) Zoomed view of the region with
fire hazard 4 values over the gener-
ated dot mask.
(b) Zoomed view of the region with
fire hazard 5 values over the gener-
ated dot mask.
Figure 15: Magnified view of each chosen region with dis-
tance measurements between each point made via QGIS.
transmitting the acquired data to the central process-
ing. As future work, the forest data will be collected
and analysed with artificial intelligent algorithm in or-
der to identify data patterns and alerts to the control
servers, triggering in the case of an ignition detection.
ACKNOWLEDGEMENTS
This work has been supported by Fundac¸
˜
ao La Caixa
and FCT — Fundac¸
˜
ao para a Ci
ˆ
encia e Tecnologia
within the Project Scope: UIDB/5757/2020.
REFERENCES
Adorno, D., Soares, S., Lima, J., and Valente, A. (2019).
Evaluation of lp-wan technologies for fire forest de-
tection systems. In ALLSENSORS 2019, The Fourth
International Conference on Advances in Sensors, Ac-
tuators, Metering and Sensing, pages 49–53. IARIA
Conference.
Alkhatib, A. A. (2014). A review on forest fire detection
techniques. International Journal of Distributed Sen-
sor Networks, 10(3):597368.
Aslan, Y. E., Korpeoglu, I., and Ulusoy,
¨
O. (2012). A frame-
work for use of wireless sensor networks in forest fire
detection and monitoring. Computers, Environment
and Urban Systems, 36(6):614–625.
Baranov, A., Spirjakin, D., Akbari, S., and Somov, A.
(2015). Optimization of power consumption for gas
sensor nodes: A survey. Sensors and Actuators A:
Physical, 233:279–289.
Chen, T.-H., Wu, P.-H., and Chiou, Y.-C. (2004). An early
fire-detection method based on image processing. In
2004 International Conference on Image Processing,
2004. ICIP’04., volume 3, pages 1707–1710. IEEE.
Copernicus (2019). European union’s earth observation
programme. https://www.copernicus.eu. Accessed
November, 2019.
ICNF (2019). Instituto de conservac¸
˜
ao da natureza e das
florestas. https://www.icnf.pt. Accessed November,
2019.
Katayama, H., Naitoh, M., Suganuma, M., Harada, M.,
Okamura, Y., Tange, Y., and Nakau, K. (2009). De-
velopment of the compact infrared camera (circ) for
wildfire detection. In Remote Sensing System Engi-
neering II, volume 7458, page 745806. International
Society for Optics and Photonics.
Lloret, J., Garcia, M., Bri, D., and Sendra, S. (2009).
A wireless sensor network deployment for rural
and forest fire detection and verification. sensors,
9(11):8722–8747.
LoRa Alliance Technical Marketing Workgroup, L. (2019).
technical overview of lora and lorawan. help@
lora-alliance.org. November, 2019.
QGIS (2019). A free and open source geographic infor-
mation system. https://qgis.org. Accessed November,
2019.
Singh, P. K. and Sharma, A. (2017). An insight to forest fire
detection techniques using wireless sensor networks.
In 2017 4th International Conference on Signal Pro-
cessing, Computing and Control (ISPCC), pages 647–
653. IEEE.
Verde, J. C. (2010). Avaliac¸
˜
ao da perigosidade de inc
ˆ
endio
florestal. PhD thesis, University of Lisbon.
Zhang, J., Li, W., Yin, Z., Liu, S., and Guo, X. (2009).
Forest fire detection system based on wireless sensor
network. In 2009 4th IEEE conference on industrial
electronics and applications, pages 520–523. IEEE.
