
Enabling Container Cluster Interoperability using a TOSCA
Orchestration Framework
Domenico Calcaterra, Giuseppe Di Modica, Pietro Mazzaglia and Orazio Tomarchio
Department of Electrical, Electronic and Computer Engineering, University of Catania, Catania, Italy
Keywords:
Containerised Applications, Deployment Orchestration, Cloud Provisioning, TOSCA, BPMN.
Abstract:
Cloud orchestration frameworks are recognised as a useful tool to tackle the complexity of managing the
life-cycle of Cloud resources. In scenarios where resources happen to be supplied by multiple providers,
such complexity is further exacerbated by portability and interoperability issues due to incompatibility of
providers’ proprietary interfaces. Container-based technologies do provide a solution to improve portability in
the Cloud deployment landscape. Though the majority of Cloud orchestration tools support containerisation,
they usually provide integration with a limited set of container-based cluster technologies without focusing on
standard-based approaches for the description of containerised applications. In this work we discuss how we
managed to embed the containerisation feature into a TOSCA-based Cloud orchestrator in a way that enables
it to theoretically interoperate with any container run-time software. Tests were run on a software prototype to
prove the approach viability.
1 INTRODUCTION
Cloud Computing is a distributed system paradigm
which enables the sharing of resource pools, on an on-
demand basis model. For the IT industry, this leads to
several benefits in terms of availability, scalability and
costs, lowering the barriers to innovation (Marston
et al., 2011). Moreover, Cloud technologies encour-
age a larger distribution of services across the internet
(Dikaiakos et al., 2009). The resources, while being
allocated in remote data centers, may be accessible
from different parts of the world thanks to third-party
providers offering extensive network infrastructures.
Since Cloud has emerged as a dominating
paradigm for application distribution, providers have
implemented several new features in order to offer
services which are not restricted to infrastructure pro-
visioning. This trend is depicted as “Everything as a
Service”, namely XaaS (Duan et al., 2015). Despite
the wide choice of Cloud providers and services, there
still exists an intrinsic complexity in the deployment
and management of Cloud applications, which makes
the process draining and time-consuming.
In this respect, orchestration tools have increased
their popularity in recent years, becoming a main
topic for Cloud research (Weerasiri et al., 2017). The
development of high-level specification languages to
describe the topology of Cloud services facilitates the
orchestration process and aims to portability and in-
teroperability across different providers (Petcu and
Vasilakos, 2014). With regard to standard initiatives,
OASIS TOSCA (Topology and Orchestration Specifi-
cation for Cloud Applications) (OASIS, 2013) stands
out for the large number of works which are based
upon it (Bellendorf and Mann, 2018).
In recent years, container-based applications pro-
vided a solution in order to improve portability in the
Cloud deployment landscape (Pahl, 2015). Contain-
ers offer packaged software units which run on a vir-
tualised environment. Their decoupling from the run-
ning environment eases their deployment process and
the management of their dependencies. These qual-
ities, abetted by the lightweight nature of contain-
ers, their high reusability and their near-native perfor-
mances (Ruan et al., 2016) raised significant interest
in the business-oriented context.
Containers can be either run as standalone ser-
vices or organised in swarm services. Swarm services
increase the flexibility of containers, allowing them to
run on clusters of resources. This approach combines
well with the Cloud Computing paradigm, providing
faster management operations while granting all the
advantages of Cloud services.
In this paper, we describe a framework for the
deployment and orchestration of containerised appli-
cations. Based on the work presented in (Calcaterra
Calcaterra, D., Di Modica, G., Mazzaglia, P. and Tomarchio, O.
Enabling Container Cluster Interoperability using a TOSCA Orchestration Framework.
DOI: 10.5220/0009410701270137
In Proceedings of the 10th International Conference on Cloud Computing and Services Science (CLOSER 2020), pages 127-137
ISBN: 978-989-758-424-4
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
127

et al., 2017) and (Calcaterra et al., 2018), the frame-
work provides several desirable features, such as the
possibility to describe the application using standard
languages, a fault-aware orchestration system built
on business-process models, compatibility with the
main Cloud providers, and integration with different
container-based cluster technologies.
The rest of the paper is structured as follows. In
Section 2, we arrange a background of the technolo-
gies exploited for this work. In Section 3, we present
relevant works concerning container orchestration.
Section 4 debates cluster orchestrators and their in-
teroperability. In Section 5, the approach adopted for
our framework is discussed. Section 6 discusses about
a prototype implementation and an experiment run on
a real-world application scenario. Finally, Section 7
concludes the work.
2 BACKGROUND
This work aims to provide synergy between con-
tainerisation technologies and the most famous topol-
ogy specification language, namely OASIS TOSCA.
In this section, we provide a more in-depth back-
ground for these topics.
2.1 Containerisation Technologies
In the container landscape, Docker
1
represents the
leading technology for container runtimes (Sysdig,
2019). It provides a set of technologies for build-
ing and running containerised applications. Further-
more, DockerHub
2
offers a catalogue of Docker im-
ages ready to deploy, which allows users to share their
work. Among competitors, containerd
3
, CRI-O
4
, and
Containerizer
5
are worth mentioning.
In recent times, container-based cluster solutions
have gained increasing popularity for deploying con-
tainers. Some of these solutions further support
the orchestration of containers, providing greater
scalability, improved reliability, and a sophisticated
management interface. Kubernetes
6
currently rep-
resents the most widespread ecosystem for manag-
ing containerised workloads. With its wide ecosys-
tem, it facilitates both declarative configuration and
1
https://www.docker.com/
2
https://hub.docker.com/
3
https://containerd.io/
4
https://cri-o.io/
5
http://mesos.apache.org/documentation/latest/mesos-
containerizer/
6
https://kubernetes.io/
automation of container clusters. Docker Swarm
7
offers a native solution for cluster management to
be integrated into Docker. Mesos
8
is an open-
source project to manage computer clusters backed
by Apache Software Foundation. It natively supports
Docker containers and may be used in conjunction
with Marathon
9
, a platform for container orchestra-
tion.
Some of the most renowned cloud providers,
such as Amazon AWS, Microsoft Azure, and Google
Cloud have built-in services to operate containers and
clusters. In most cases, these built-in services are just
ad-hoc implementations of the aforementioned tech-
nologies. OpenStack
10
represents an open-source al-
ternative to control large pools of resources. In order
to support container orchestration, it uses the Heat
11
and Magnum
12
components. The first is a service
to orchestrate composite Cloud applications, which
is required for Magnum to work properly. The lat-
ter allows clustered container platforms (Kubernetes,
Mesos, Swarm) to interoperate with other OpenStack
components through differentiated APIs.
The wide choice of technologies and providers
gives developers many options in terms of flexibility,
reliability, and costs. However, all these services are
neither interchangeable nor interoperable. Switching
from a service (or a platform) to another requires sev-
eral manual operations to be performed, and the learn-
ing curve owing to the new tools functioning might be
non-trivial. These shortcomings have led to the devel-
opment of systems to automate deployment and man-
agement operations, able to manage the interface with
multiple container technologies, clusters and Cloud
providers.
2.2 The TOSCA Specification
Research community has focused on approaches us-
ing standardised languages to specify the topology
and the management plans for Cloud applications. In
this regard, TOSCA represents a notable contribution
to the development of Cloud standards, since it allows
to describe multi-tier applications and their life-cycle
management in a modular and portable fashion (Bel-
lendorf and Mann, 2018).
TOSCA is a standard designed by OASIS to en-
able the portability of Cloud applications and the re-
lated IT services (OASIS, 2013). This specification
7
https://docs.docker.com/engine/swarm/
8
http://mesos.apache.org/
9
https://mesosphere.github.io/marathon/
10
https://www.openstack.org/
11
https://wiki.openstack.org/wiki/Heat
12
https://wiki.openstack.org/wiki/Magnum
CLOSER 2020 - 10th International Conference on Cloud Computing and Services Science
128

permits to describe the structure of a Cloud applica-
tion as a service template, which is composed of a
topology template and the types needed to build such
a template.
The topology template is a typed directed graph,
whose nodes (called node templates) model the ap-
plication components, and edges (called relationship
templates) model the relations occurring among such
components. Each node of a topology can also con-
tain several information such as the corresponding
component’s requirements, the operations to manage
it (interfaces), the attributes and the properties it fea-
tures, the capabilities it provides, and the software ar-
tifacts it uses.
TOSCA supports the deployment and manage-
ment of applications in two different flavours: imper-
ative processing and declarative processing. The im-
perative processing requires that all needed manage-
ment logic is contained in the Cloud Service Archive
(CSAR). Management plans are typically imple-
mented using workflow languages, such as BPMN
13
or BPEL
14
. The declarative processing shifts man-
agement logic from plans to runtime. TOSCA run-
time engines automatically infer the corresponding
logic by interpreting the application topology tem-
plate. The set of provided management functionalities
depends on the corresponding runtime and is not stan-
dardised by the TOSCA specification. OpenTOSCA
(Binz et al., 2014) is a famous open-source TOSCA
runtime environment.
TOSCA Simple Profile is an isomorphic ren-
dering of a subset of the TOSCA specification in
the YAML language (OASIS, 2019). It defines a
few normative workflows that are used to operate
a topology and specifies how they are declaratively
generated: deploy, undeploy, scaling-workflows and
auto-healing workflows. Imperative workflows can
still be used for complex use-cases that cannot be
solved in declarative workflows. However, they pro-
vide less reusability as they are defined for a spe-
cific topology rather than being dynamically gener-
ated based on the topology content. The work de-
scribed in this paper heavily grounds on the TOSCA
standard and, specifically, on TOSCA Simple Profile.
This provides convenient definitions for container
nodes. The tosca.nodes.Container.Runtime type rep-
resents the virtualised environment where containers
run. The tosca.nodes.Container.Application type rep-
resents an application that uses container-level virtu-
alisation.
Besides container types, the TOSCA Simple
Profile specification provides other useful tools
13
http://www.bpmn.org/
14
https://www.oasis-open.org/committees/wsbpel/
for the description of containerised applications,
such as the Repository Definition, which can be
exploited to define internal or external repositories
for pulling container images, the non-normative
tosca.artifacts.Deployment.Image.Container.Docker
type for Docker images, and the Configure step in
Standard interface node life-cycle, which allows to
define post-deployment configuration operations or
scripts to execute.
3 RELATED WORK
Several research and business-oriented projects have
exploited the TOSCA standard for container orches-
tration.
Cloudify
15
delivers container orchestration inte-
grating multiple technologies and providers. While
it offers graphical tools for sketching and modelling
an application, its data format is based on the TOSCA
standard. Alien4Cloud
16
is an open-source platform
which provides a TOSCA nearly-normative set of
types for Docker support. Kubernetes and Mesos or-
chestrators are available through additional plugins.
Both the above-mentioned works implement the in-
teroperability different clusters and providers defining
complex sets of nodes, which are specific to the tech-
nologies used. Moreover, their TOSCA implementa-
tions reckon on Domain-Specific Languages (DSLs)
which, despite sharing the TOSCA template struc-
ture, do not use the node type hierarchy defined in the
standard. With respect to Cloudify, the approach dis-
cussed in this paper focuses on TOSCA-compliant ap-
plication descriptions, making no prior assumptions
regarding the technology stack to be established.
In (Kiss et al., 2019) the authors present Mi-
CADO, an orchestration framework which guaran-
tees out-of-the-box reliable orchestration, by work-
ing closely with Swarm and Kubernetes. Unlike the
precedent approaches, MiCADO does not overturn
the TOSCA standard nodes, but the cluster orchestra-
tor is still hardcoded in the Interface section of each
node of the topology.
TosKer (Brogi et al., 2018) presents an approach
which leverages on the TOSCA standard for the de-
ployment of Docker-based applications. This work
claims to be able to generalise its strategy to cluster
systems, but neither a proof nor an explanation of how
to deal with the differences between clustered and
non-clustered scenarios is given. TosKer approach
is very different from the one proposed in this paper,
15
http://cloudify.co/
16
https://alien4cloud.github.io/
Enabling Container Cluster Interoperability using a TOSCA Orchestration Framework
129
since it does not provide any automatic provisioning
of the deployment plan and it is based on the redefini-
tion of several nodes of the TOSCA standard.
In (Kehrer and Blochinger, 2018) the authors pro-
pose a two-phase deployment method based on the
TOSCA standard. They provide a good integration
with Mesos and Marathon, but they do not either sup-
port other containerised clusters or furnish automa-
tion for the deployment of the cluster.
In summary, all the current works achieve con-
tainer cluster interoperability, or partial interoperabil-
ity, either associating platform-specific information to
the nodes of the topology template or redefining the
TOSCA hierarchy of nodes. Thus, in order to work
with the above mentioned frameworks, it is necessary
to know in advance both the technological stack and
the framework-specific nodes to use.
The work we propose differentiates from all ex-
isting works in its goals, which are: enabling high
interoperability between different technologies and
providers; providing a standard-compliant approach,
with no overturning of the standard-defined types and
no prior assumptions about the technology stack to be
established; and adopting the principle of separation
of concerns between the topology of the application
and its orchestration.
4 ACHIEVING CLUSTER
INTEROPERABILITY
In this section, we first analyse existing swarm ser-
vices to provide interoperability between multiple
container cluster technologies. Then, the strategy
adopted to describe the topology of containerised ap-
plications operating on top of multiple cluster plat-
forms is presented.
4.1 Analysis of Cluster Orchestrators
To operate on top of different cluster platforms, a
common specification model, compatible across di-
verse technologies, is required. To develop such a
model, we analysed three of the most popular cluster
orchestrators: Docker Swarm, Kubernetes and Mesos
+ Marathon. Our analysis focused on highlighting
similarities and points of contrast within the aspects
that affect the deployment of containers. We found
that all the three platforms implement the main fea-
tures for container orchestration in similar ways. For
example, some entities and services represent identi-
cal concepts, even though they are named differently.
The results of the comparison are available in Table 1.
Application Specification indicates the method to
describe the scenario to deploy, i.e., specification for-
mats and languages. Deployment Unit refers to the
atomic deployable entity, which is managed by the
cluster in terms of scalability and availability. Con-
tainer and Cluster indicate the names used for con-
tainer entities and for clusters of physical machines.
Volume Management describes the strategies to man-
age the attachment of storage entities and Network-
ing Management illustrates how to establish internal
and external connections. Configuration Operations
present methods to execute post-deployment configu-
ration operations on containers.
Firstly, we identified the most important features
for deploying and initialising containerised applica-
tions. Then, for each of these features, we found
strategies leading to similar results in all the analysed
orchestrators. This information can be found in the
Table 1: A comparison of how features are implemented in Docker Swarm, Kubernetes and Mesos + Marathon.
Docker Swarm Kubernetes Mesos + Marathon
Application Specification Docker Compose YAML YAML format JSON format
Deployment Unit Service Pod Pod
Container Container Container Task
Cluster Swarm Cluster Cluster
Volume Management
Volumes can be attached
to Services or be auto-
matically created accord-
ing to the volume specifi-
cation on the service.
PersistentVolumes can be
directly attached to Pods
or may be automatically
provisioned.
The appropriate amount of
disk space is implicitly re-
served, according to speci-
fication.
Networking Management
Overlay networks manage
communications among
the Docker daemons
participating in the swarm.
Services provide network-
ing, granting a way to ac-
cess Pods.
Containers of each pod in-
stance can share a network
namespace, and communi-
cate over a VLAN or pri-
vate network.
Configuration Operations
It is possible to execute
commands directly on the
service. (eg docker exec)
It is possible to execute
commands directly on the
container (eg kubectl exec)
It is possible to execute
commands directly on the
task. (eg dcos task exec)
CLOSER 2020 - 10th International Conference on Cloud Computing and Services Science
130

rows of the Table.
From this analysis, many similarities emerged be-
tween the three platforms. All of them allow to spec-
ify the desired application using a tree-like data model
within portable formats, such as JSON and YAML.
Furthermore, all the orchestrators map resources in
similar ways for deployment units, containers, and
clusters, where the main difference is given by the
naming conventions.
With regard to volume and networking manage-
ment, different platforms implement different strate-
gies. However, all the volume management ap-
proaches share the possibility to delegate the provi-
sioning of volumes to the platform, taking for granted
that volume properties are indicated in the application
specification. As for networking, each of the software
grants accessibility to deployment units and contain-
ers, both within and outside the cluster, although they
manage it in different ways. Finally, all the platforms
allow to execute configuration commands on the de-
ployed instances, by accessing them directly.
The analysis of container cluster interoperability
laid the groundwork for a unified approach. This is
further explored in the next section, where the com-
mon specification format and the interfaces to the dif-
ferent cluster orchestrators are discussed.
4.2 Application Description
One of the key aspects of this work is the development
of a standard-based approach for the topology de-
scription of containerised applications, which lever-
ages the TOSCA standard.
As discussed in Section 2.2, TOSCA Simple Pro-
file includes several node types for container-based
application topologies. According to the analysis in
Table 1, we mapped TOSCA Container Runtime to
Deployment Unit entities and TOSCA Container Ap-
plication to containers. This allows to easily describe
containerised applications within a cluster in terms
of nodes. However, we found that using the plain
TOSCA Container Application would flatten the node
hierarchy present in the Simple Profile specification,
removing the possibility to assign meaningful roles
to each node in the topology (e.g. Database, Web-
Server).
t o s c a . nod e s . C o n t a i n e r . A p p l i c a t i o n :
d e r i v e d f r o m : t o s c a . nod e s . R oot
r e q u i r e m e n t s :
- h o s t :
c a p a b i l i t y : t o s c a . c a p a b i l i t i e s . Compute
nod e : t o s c a . n ode s . C o n t a i n e r . Ru n t i me
r e l a t i o n s h i p : t o s c a . r e l a t i o n s h i p s . H ost edOn
- s t o r a g e :
c a p a b i l i t y : t o s c a . c a p a b i l i t i e s . S t o r a g e
- n e tw o rk :
c a p a b i l i t y : t o s c a . c a p a b i l i t i e s . E n d p o i n t
Listing 1: TOSCA Container Application node.
For the sake of clarity, Listing 1 shows the
TOSCA Container Application node which represents
a generic container-based application. Other than
hosting, storage and network requirements, no prop-
erties are defined. Besides, it directly derives from the
root node as all other TOSCA base node types do. If,
on the one hand, this allows to have consistent def-
initions for basic requirements, capabilities and life-
cycle interfaces, on the other one, customisation is
only possible by type extension.
t o s c a . nod e s . D a t a b a se :
d e r i v e d f r o m : t o s c a . nod e s . R oot
p r o p e r t i e s :
name:
t y p e : s t r i n g
d e s c r i p t i o n : t h e l o g i c a l name o f t h e d a t a b a s e
p o r t :
t y p e : i n t e g e r
d e s c r i p t i o n : >
t h e p o r t t h e u n d e r l y i n g d a t a b a s e s e r v i c e
w i l l l i s t e n t o f o r d a t a
u s e r :
t y p e : s t r i n g
d e s c r i p t i o n : >
t h e u s e r a c c o u n t name f o r DB a d m i n i s t r a t i o n
r e q u i r e d : f a l s e
p a s sw o r d:
t y p e : s t r i n g
d e s c r i p t i o n : >
t h e p a ssw o rd f o r t h e DB u s e r a c c o u n t
r e q u i r e d : f a l s e
r e q u i r e m e n t s :
- h o s t :
c a p a b i l i t y : t o s c a . c a p a b i l i t i e s . Compute
nod e : t o s c a . n od e s .DBMS
r e l a t i o n s h i p : t o s c a . r e l a t i o n s h i p s . H ost edOn
c a p a b i l i t i e s :
d a t a b a s e e n d p o i n t :
t y p e : t o s c a . c a p a b i l i t i e s . E n d p o in t . D a t a b a s e
Listing 2: TOSCA Database node.
t o s c a . nod e s . C o n t a i n e r . D a t a b a s e :
d e r i v e d f r o m : t o s c a . nod e s . C o n t a i n e r . A p p l i c a t i o n
d e s c r i p t i o n : >
TOSCA C o n t a i n e r f o r D a t a b a s e s whi c h e mp l oy s
t h e same c a p a b i l i t i e s a nd p r o p e r t i e s o f t h e
t o s c a . nod e s . D a t a b a se b u t w h ich e x t e n d s f r om
t h e C o n t a i n e r . A p p l i c a t i o n n o d e t y p e
p r o p e r t i e s :
u s e r :
r e q u i r e d : f a l s e
t y p e : s t r i n g
d e s c r i p t i o n : >
User a c c o u n t name f o r DB a d m i n i s t r a t i o n
p o r t :
r e q u i r e d : f a l s e
t y p e : i n t e g e r
d e s c r i p t i o n : >
The p o r t t h e d a t a b a s e s e r v i c e w i l l u s e
t o l i s t e n f o r in c omi n g d a t a a n d r e q u e s t s .
name:
r e q u i r e d : f a l s e
t y p e : s t r i n g
d e s c r i p t i o n : >
The name o f t h e d a t a b a s e .
p a s sw o r d:
r e q u i r e d : f a l s e
t y p e : s t r i n g
d e s c r i p t i o n : >
The p a ss w o rd f o r t h e DB u s e r a c c o u n t
c a p a b i l i t i e s :
d a t a b a s e e n d p o i n t :
t y p e : t o s c a . c a p a b i l i t i e s . E n d p o in t . D a t a b a s e
Listing 3: TOSCA Container Database node.
As a result, we extended the TOSCA Simple Pro-
file hierarchy for containers, by deriving from the
Enabling Container Cluster Interoperability using a TOSCA Orchestration Framework
131

TOSCA Container Application type and defining the
same properties and capabilities that are present in
each of the corresponding TOSCA node in the stan-
dard. Listing 2 and Listing 3 further explain our
methodology, describing, by way of example, the
TOSCA Database node and the TOSCA Container
Database node respectively.
While using the plain TOSCA Container Applica-
tion type would still allow to deploy a scenario in our
framework, we believe that preserving a node typing
system would make the specification more descrip-
tive. Moreover, this choice enables the use of the
standard-defined typed relationships (i.e. Connect-
sTo, DependsOn, HostedOn, ...) between different
types of container nodes.
Another resource mapping was required for man-
aging Volumes. TOSCA Simple Profile provides use-
ful Storage node types for representing storage re-
sources, such as tosca.nodes.Storage.BlockStorage.
We mapped TOSCA Block Storage to volumes.
Each volume should be connected to the respec-
tive container using the standard-defined relationship
tosca.relationships.AttachesTo. TOSCA AttachesTo
already defines the location property which is of pri-
mary importance for containers, since it allows to de-
fine the mount path of a volume.
Networking management did not need any ad-
ditional specification. Cluster networks may be
arranged using the port property of a node and
analysing its relationships with the other nodes in the
topology.
5 SYSTEM DESIGN
The aim of this work is to design a TOSCA Orchestra-
tor for the deployment of containerised applications
on clusters. The Orchestrator should also be able to
interface with several Cloud providers and a variety
of container technologies. The main features of the
framework are described in the following subsections.
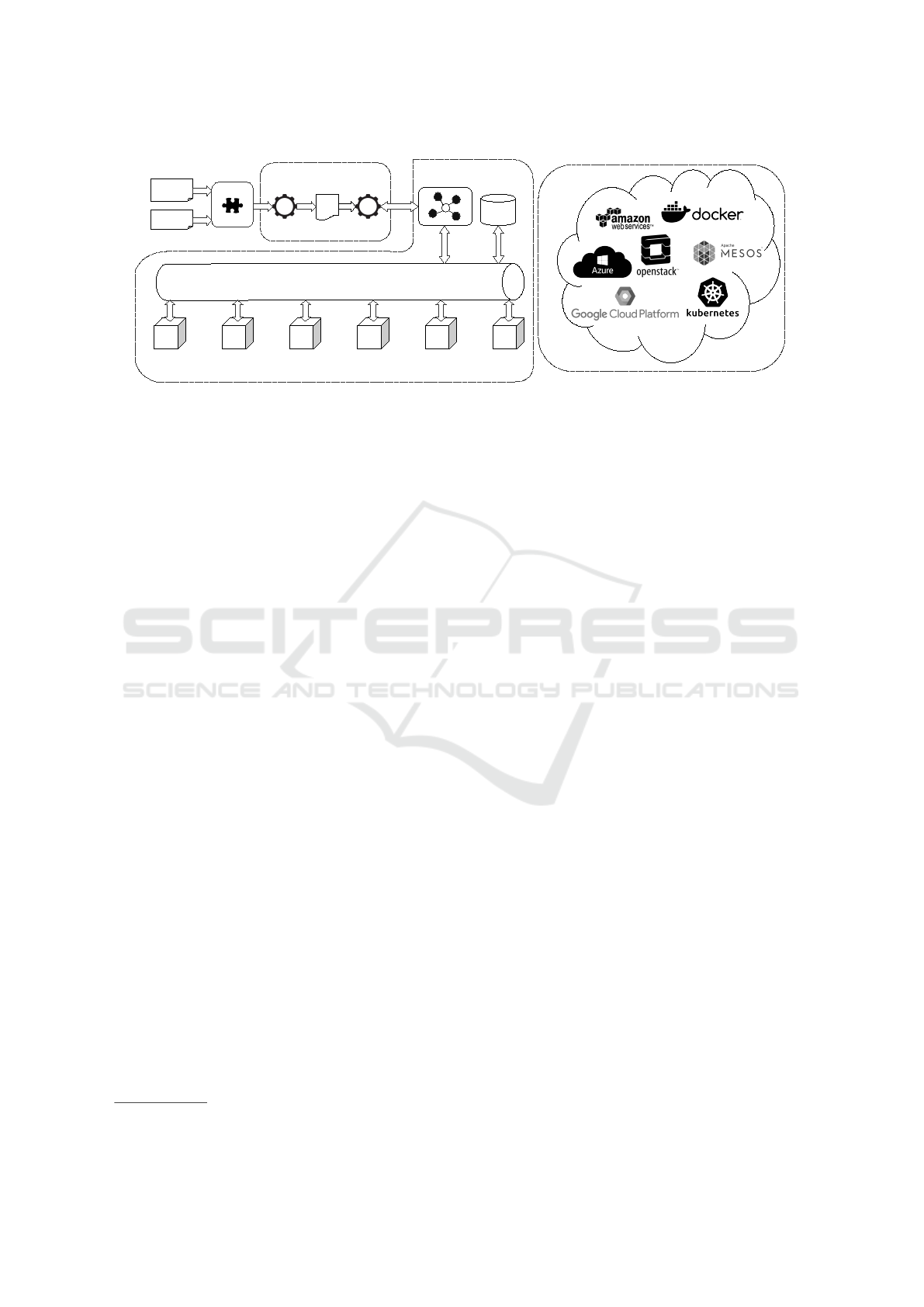
5.1 Framework Architecture
Starting from the Cloud application description, the
framework is capable of devising and orchestrating
the workflow of the provisioning operations to ex-
ecute. Along with the application description, sev-
eral application properties may be provided using the
dashboard tool. This is the main endpoint in order to
interact with the framework since it allows to config-
ure and start the deployment process.
Firstly, the dashboard allows users to either sketch
the topology of their desired applications, using
graphical modelling tools, or upload and validate pre-
viously worked application descriptions. Then, it is
possible to deploy the uploaded applications, provid-
ing many configuration parameters, such as the target
Cloud provider or the cluster technology to use for
containers. At a later stage, the dashboard can also
be used to display information about the deployment
status and debug information.
We have designed and implemented a TOSCA Or-
chestrator which transforms the YAML model into an
equivalent BPMN model, which is fed to a BPMN en-
gine that instantiates and coordinates the related pro-
cess. The process puts in force all the provisioning ac-
tivities needed to build up the application stack. The
overall provisioning scenario is depicted in Figure 1.
For each framework service, multiple implemen-
tations can be provided for the different supported
Cloud providers. All the services are offered within
the framework through an Enterprise Service Bus
(ESB). The original work provides two categories of
provisioning services that need to be integrated in the
ESB: Cloud Resource Services and Packet-based Ser-
vices. This work requires an additional category, Con-
tainer Cluster Services, which includes functionali-
ties to deploy applications on cluster platforms. In or-
der to integrate all the mentioned services in the ESB,
we deploy a layer of Service Connectors which are
responsible for connecting requests coming from the
Provisioning Tasks with the Provisioning Services.
Service Connectors allow to achieve service location
transparency and loose coupling between Provision-
ing BPMN plans (orchestrated by the Process Engine)
and Provisioning Services.
The Service Registry is responsible for the regis-
tration and discovery of Connectors. The Service Bro-
ker is in charge of taking care of the requests coming
from the Tasks. Cloud Service Connectors implement
interactions with Cloud Providers for the allocation
of Cloud resources. For each service type, a specific
Connector needs to be implemented. For instance,
Instantiate Cluster represents the generic Connec-
tor interface to the instantiation of Cloud resources
of “Container Cluster” type. All concrete Connec-
tors to real Cloud services (AWS, OpenStack, Azure,
etc.) must implement the Instantiate Cluster interface.
Likewise, Instantiate VM is the generic Connector in-
terface to “Virtual Machine” services, which concrete
Connectors to real services in the Cloud must imple-
ment.
Packet-based Service Connectors are meant to im-
plement interactions with all service providers that
provide packet-based applications. When the YAML-
to-BPMN conversion takes place, three types of
BPMN service tasks might be generated: “Create”,
CLOSER 2020 - 10th International Conference on Cloud Computing and Services Science
132
Application
properties
TOSCA
YAML
YAML
to BPMN
BPMN
Engine
BPMN
Service
Broker
Service
Registry
Service BUS
Create VM
Service
Create Cluster
Service
Create Storage
Service
Deploy DB
Service
Deploy
Deployment Unit
Service
Deploy/Create
...
Service
S
e
r
v
i
c
e
C
o
n
n
e
c
t
o
r
s
L
a
y
e
r
S
e
r
v
i
c
e
P
r
o
v
i
s
i
o
n
i
n
g
L
a
y
e
r
Orchestration Layer
Dashboard
Figure 1: Overview of the Provisioning Scenario, Showing the Different Layers of the Framework.
“Configure” and “Start”. To each of these tasks corre-
sponds a generic connector interface (Create, Config-
ure and Start). These interfaces are then extended in
order to manage several types of applications (DBMS,
Web Servers, etc.). The latter are the ones that con-
crete Connectors must implement in order to interact
with real packet-based application providers.
In this work we focus on container-based ap-
plications which use container cluster technologies.
The TOSCA operations for container orchestration
are different from resource and package operations,
and cluster technologies frequently perform manage-
ment operations that are relieved from the framework.
Thus, the orchestration process for Deployment Units
will be discussed later in this paper.
5.2 YAML Parsing
In our framework, the first step towards the deploy-
ment orchestration is the YAML processing. The
Parser software component is widely based on the
OpenStack parser
17
for TOSCA Simple Profile in
YAML, a Python project licensed under Apache 2.0.
The Parser builds an in-memory graph which keeps
track of all nodes and dependency relationships be-
tween them in the TOSCA template.
We extended the Parser features to adapt it for
containerised applications. The new module devel-
oped for the Parser is able to identify, analyse and
output Deployment Units specification in a suitable
format for the BPMN plans. A bottom-up approach
has been used. Starting from a Container Runtime, it
identifies the Deployment Unit and recursively find all
the containers stacked upon it and their dependencies,
making a clear distinction between volume dependen-
cies, which bind a storage volume to a container, and
external dependencies, which bind a container to an-
17
https://wiki.openstack.org/wiki/TOSCA-Parser
other container hosted either on the same Deployment
Unit or on a different one.
Each volume must be linked to its corresponding
container using the “AttachesTo” relationship. It is
important to specify the location parameter, which
would serve as the mount path for the volume. This
allows the Parser to correctly associate each volume
to its container. External dependencies are identified
and output by the Parser, since they would be used to
setup Networking for each Deployment Unit.
Finally, the Parser produces BPMN data objects
which are provided as data inputs for the BPMN
plans.
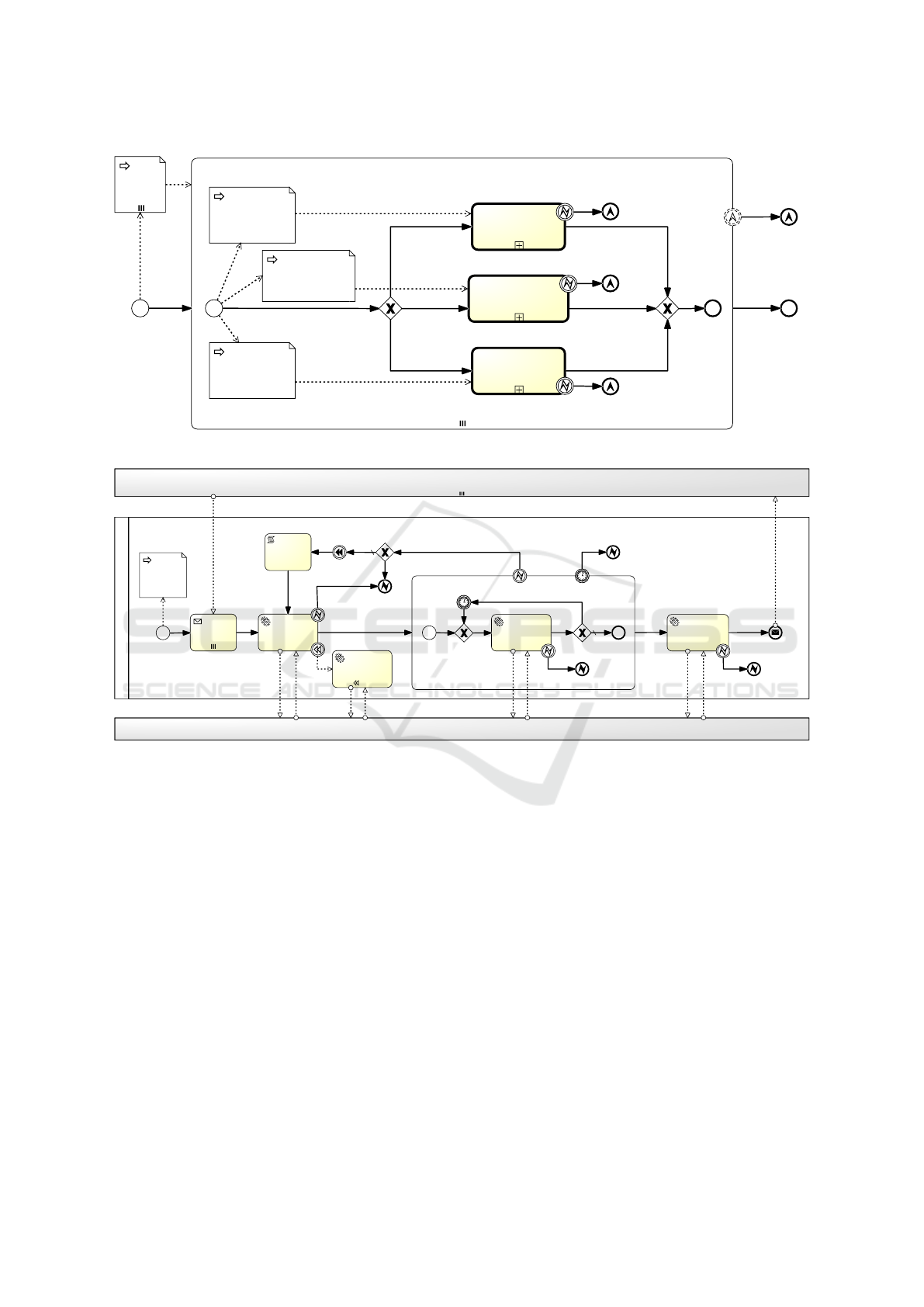
5.3 BPMN Plans
The BPMN plans in our platform rework the strategy
adopted in (Calcaterra et al., 2018). In Figure 2 the
overall service provision workflow is depicted. The
diagram is composed of a parallel multi-instance sub-
process, i.e., a set of sub-processes (called “Instanti-
ate Node”) each processing a TOSCA node in a par-
allel fashion. Originally, a TOSCA node was either
a cloud resource or a software package. In this work
we expanded the BPMN Plans for our purpose, mod-
elling a workflow path for deployment unit nodes.
In Figure 3 the detailed workflow for a deploy-
ment unit node is depicted. The top pool called “Node
Instance” represents the pool of all instances of either
the “create cloud resource” sub-process or the “create
deployment unit” sub-process, which are running in
parallel to the “create deployment unit” sub-process
being analysed. The bottom pool called “Container
Cluster Service Connectors” represents the pool of the
software connectors deployed in the ESB. In the mid-
dle pool, the sequence of tasks carried out to create
and instantiate a deployment unit are depicted. Inter-
actions of the middle pool with the “Node Instance”
pool represent points of synchronization between the
Enabling Container Cluster Interoperability using a TOSCA Orchestration Framework
133
begin
error
escalation
node
Instantiate Node
deploy
<package>
create
<cloud resource>
node
[cloud resource]
node
[package]
cloud resource
error
package
error
any error
any error
node
[deployment unit]
create
<deployment unit>
any error
deployment unit
error
complete
any error
escalation
deployment unit
package
cloud resource
Figure 2: Instantiate Node Overall Workflow.
create <deployment unit>
create <deployment unit>
decrement
retry counter
retry?
<deployment unit>
create error
<deployment unit>
dispose
<deployment unit>
create start
create
<deployment unit>
error
dispose
<deployment unit>
await create
notifications
wait until created
check period
check
<deployment unit>
create status
create
error
error
create
error
create
timeout
<deployment unit>
create timeout
<deployment unit>
ready
configure
<deployment unit>
error
configuration
error
node
[deployment unit]
Container Cluster Service Connectors
Node Instance
NO
wip
Figure 3: Node Deployment Unit Workflow.
multiple installation instances, that may be involved
in a provision process.
The creation of a deployment unit starts with a
task that awaits notifications coming from the preced-
ing sub-processes, which may consist of the “create
cloud resource” sub-process for the creation of the
cluster, in case this was not instantiated before, or
other “create deployment unit” sub-processes. A ser-
vice task will then trigger the actual instantiation by
invoking the appropriate Connector on the ESB. Here,
if a fault occurs, it is immediately caught and the
whole sub-process is cancelled. Following the path
up to the parent process, an escalation is engaged. If
the creation step is successful, a “wait-until-created”
sub-process is activated.
Checks on the status are iterated until the cluster
platform returns an “healthy status” for the deployed
instance. The “check deployment unit create status”
service task is committed to invoke the Connector on
the ESB to check the status on the selected swarm
service. The deployment unit’s status is strongly de-
pendent on the hosted containers’ status. However,
container cluster platforms automatically manage the
life-cycle of containers, then the check is executed to
detect errors which are strictly related to deployment
units’ resources.
Checking periods are configurable, so is the time-
out put on the boundary of the sub-process. An er-
ror event is thrown either when the timeout has ex-
pired or when an explicit error has been signalled in
response to a status check call. In the former case,
the escalation is immediately triggered; in the latter
case, an external loop will lead the system to au-
tonomously re-run the whole deployment unit cre-
ation sub-process a configurable number of times, be-
fore yielding and eventually triggering an escalation
event. Moreover, a compensation mechanism (“dis-
pose deployment unit” task) allows to dispose of the
CLOSER 2020 - 10th International Conference on Cloud Computing and Services Science
134

deployment unit, whenever a fault has occurred.
Then the “configure deployment unit” task may be
invoked to execute potential configuration operations
on the deployed containers. When the workflow suc-
cessfully reaches the end, a notification is sent. Oth-
erwise, the occurred faults are caught and handled via
escalation.
5.4 Service Connectors
Different kinds of Service Connectors serve the cause
of container orchestration in our framework. The first
category contains the services related to the different
Cloud providers, such as AWS, Azure, Google Cloud,
and OpenStack. In particular, the cluster for deploy-
ing the scenario should be provisioned and the param-
eters for authenticating on the cluster should be pro-
vided to the ESB for future operations.
The second category of services is related to the
container cluster platforms, namely Docker Swarm,
Kubernetes and Mesos. After creating the cluster, the
ESB should be able to authenticate and communicate
with the cluster for starting the operations which re-
alise the deployment of the scenario. These connec-
tors also perform a translation from the parsed topol-
ogy to the specific format of the container cluster plat-
form.
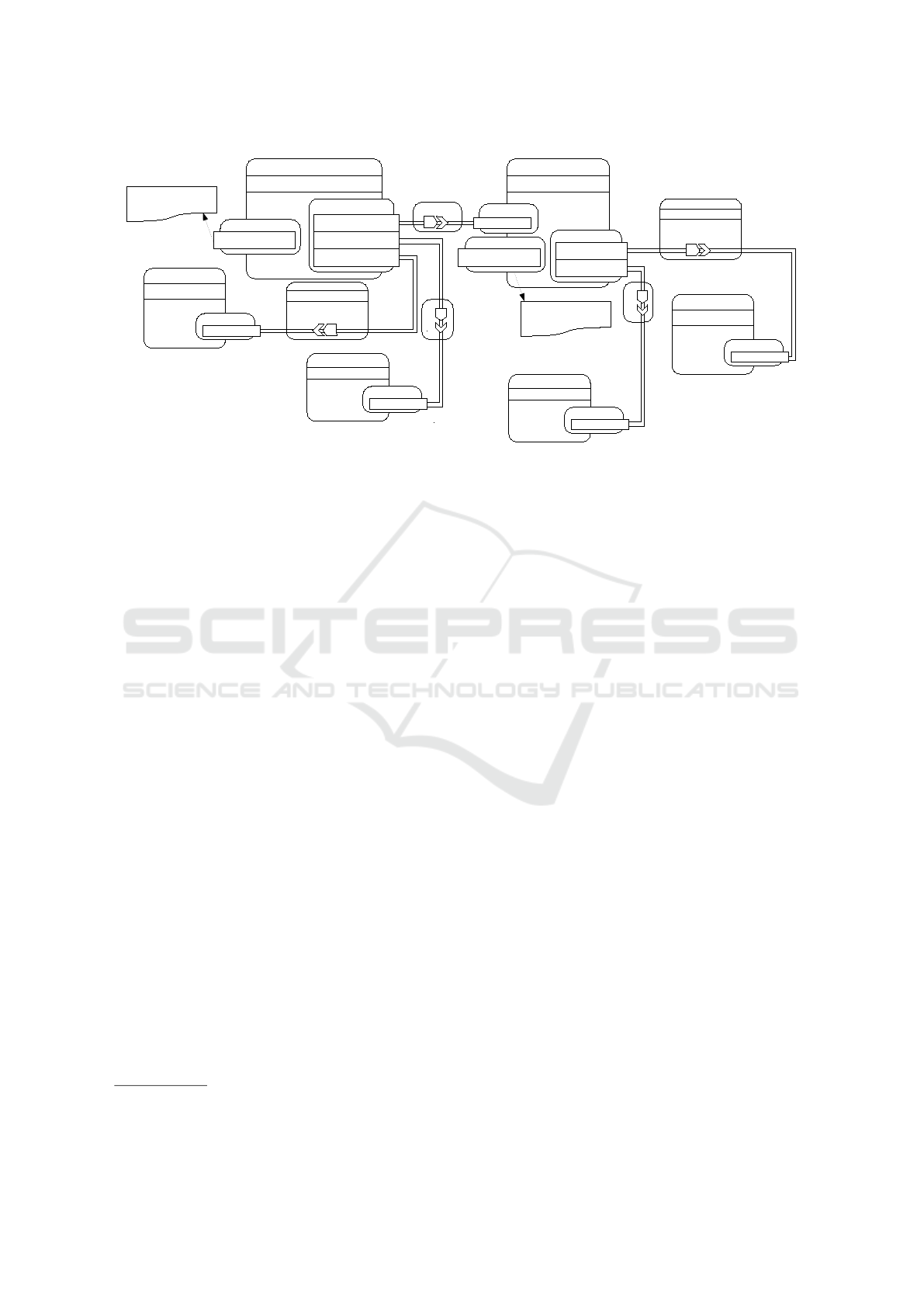
6 PROTOTYPE
IMPLEMENTATION AND
TESTS
In this section, we discuss the implementation of the
framework in more detail and corroborate the working
behaviour of our software with a test on a simple real-
world scenario. This would be a containerised version
of a WordPress (WP) scenario including two Deploy-
ment Units, MySQL and WordPress, which are both
stacked with a Volume and a Container. The scenario
is depicted in Figure 4, by using TOSCA standard no-
tation.
In the WP scenario, container images are Docker
images which need to be pulled from the DockerHub
repository, as specified in the template. The TOSCA
Artifact image fills the implementation parameter for
the Create step in the container life-cycle. Any en-
vironment variable for the Docker image should be
given as an input of the implementation in the Cre-
ate section of the containers. For being correctly
parsed, the environment variables should have the
same names that are indicated in the DockerHub in-
structions for the image. Another parameter that can
be specified in the Create inputs is the port. Other-
wise, a port would be automatically chosen for the
service by the container orchestrator.
In Listing 4, the TOSCA Simple Profile descrip-
tion of the types and the templates used for the
MySQL deployment unit is provided as an example.
The description was drafted according to the princi-
ples defined in Section 4.2.
With regard to the BPMN plans execution, the
deployment unit workflow has to be processed two
times. The first time the instance to be created is the
MySQL deployment, while the second unit to be pro-
cessed corresponds to the WordPress deployment. We
used Flowable
18
, which is a Java based open-source
business process engine, for the implementation of
the BPMN workflow processing.
n o d e t y p e s :
t o s c a . nod e s . C o n t a i n e r . D a t a b a s e .MySQL:
d e s c r i p t i o n : >
MySQL c o n t a i n e r f r o m t h e Do c k e r Hub r e p o s i t o r y
d e r i v e d f r o m : t o s c a . nod e s . C o n t a i n e r . D a t a b a s e
r e q u i r e m e n t s :
- v olum e:
c a p a b i l i t y : t o s c a . c a p a b i l i t i e s . A t t a ch m en t
r e l a t i o n s h i p : t o s c a . r e l a t i o n s h i p s . A t t a c h e s T o
r e l a t i o n s h i p t e m p l a t e s :
t o s c a . r e l a t i o n s h i p s . MySQLAttachesToVolume:
t y p e : t o s c a . r e l a t i o n s h i p s . A t t ac he s T o
p r o p e r t i e s :
l o c a t i o n : { g e t i n p u t : m y s q l l o c a t i o n }
n o d e t e m p l a t e s :
m y s q l c o n t a i n e r :
t y p e : t o s c a . no d e s . C o n t a i n e r . Da t a b a s e .MySQL
r e q u i r e m e n t s :
- h o s t : m y s q l d e p l o y m e n t u n i t
- v olum e:
nod e : mys q l v olum e
r e l a t i o n s h i p : t o s c a . r e l a t i o n s h i p s .
MySQLAttachesToVolume
a r t i f a c t s :
my s ql i m ag e :
f i l e : my s q l: 5 . 7
t y p e : t o s c a . a r t i f a c t s . Deployment . Imag e . C o n t a i n e r .
Dock e r
r e p o s i t o r y : d o c k e r h u b
p r o p e r t i e s :
p o r t : { g e t i n p u t : m y s q l p o r t }
p a s sw o r d: { g e t i n p u t : m y s q l r o o t p w d }
i n t e r f a c e s :
S t a n d a r d :
c r e a t e :
i m p l e m e n t a t i o n : m ys q l i m a ge
i n p u t s :
p o r t : { g e t p r o p e r t y : [ SELF , p o r t ] }
m y s q l r o o t p a s s w o r d : { g e t p r o p e r t y : [ SELF ,
p a s sw o r d ]}
my s q l vo l u m e:
t y p e : t o s c a . no d e s . B l o c k S t o r a g e
p r o p e r t i e s :
s i z e : { g e t i n p u t : m y s q l v o l u m e s i z e }
m y s q l d e p l o y m e n t u n i t :
t y p e : t o s c a . no d e s . C o n t a i n e r . Runtime
Listing 4: MySQL deployment unit specification.
We tested the WP scenario with an OpenStack
Cloud provider, using Kubernetes as the container
cluster platform. A local cluster consisting of two
identical off-the-shelf PCs was considered in order
18
https://www.flowable.org/
Enabling Container Cluster Interoperability using a TOSCA Orchestration Framework
135
mysql_container
Container.Database.MySQL
Properties
●
password
●
port
Capabilities
Endpoint.DB
Requirements
Container
host: mysql_du
Lifecycle.Standard
create: mysql_image
Artifacts:
repository: docker_hub
file: mysql:5.7
get_artifact()
mysql_volume
BlockStorage
Properties
●
size
Capabilities
Attachment
H
o
s
t
e
d
O
n
Attachment
volume: mysql_volume
wordpress_container
Container.WebApplication.Wordpress
Requirements
Container
host: wordpress_du
Lifecycle.Standard
create: wp_image
get_artifact()
wordpress_du
Container.Runtime
Capabilities
Container
H
o
s
t
e
d
O
n
Attachment
volume: wordpress_volume
AttachesTo
Properties
●
location
Endpoint
db_host: mysql_container
ConnectsTo
Artifacts:
repository: docker_hub
file: wordpress
AttachesTo
Properties
●
location
wordpress_volume
BlockStorage
Properties
●
size
Capabilities
Attachment
mysql_du
Container.Runtime
Capabilities
Container
Figure 4: The WordPress Application Topology, Described Using TOSCA Specification.
to create a minimal OpenStack set-up, i.e., Controller
node and Compute node. The former also runs Heat
and Magnum services. Both nodes run Ubuntu Server
x86-64 Linux distributions. The Service Connectors
for OpenStack and Kubernetes were implemented
complementing Eclipse Vert.x
19
, a Java toolkit for
event-driven applications, with OpenStack4J
20
, for
the creation of the cluster, and the official Kuber-
netes Java client, for the deployment of the Deploy-
ment Units. Overall, the scenario was correctly pro-
visioned, returning a working WP application.
7 CONCLUSIONS
The automated provisioning of complex Cloud ap-
plications has become a key factor for the competi-
tiveness of Cloud providers. The ever-increasing us-
age of Cloud container technologies shows the impor-
tance of their management and orchestration also in
this context. Organisations do indeed package appli-
cations in containers and need to orchestrate multiple
containers across multiple Cloud providers.
In this work, starting from a previously designed
Cloud orchestration and provisioning framework, we
extended it in order to allow the deployment and or-
chestration of containerised applications. The main
effort has been devoted to provide interoperability be-
tween multiple container cluster technologies: a strat-
egy to describe the topology of containerised appli-
cations operating on top of multiple cluster platforms
has been also presented. The developed prototype and
19
https://vertx.io/
20
http://www.openstack4j.com/
the simple test presented showed the viability of the
approach.
Future work will include the development and
testing on top of different container-based cluster plat-
forms using more complex scenarios, which feature
multiple layers of resources, in order to further vali-
date our system.
REFERENCES
Bellendorf, J. and Mann, Z.
´
A. (2018). Cloud Topology and
Orchestration Using TOSCA: A Systematic Literature
Review. In Kritikos, K., Plebani, P., and de Paoli,
F., editors, Service-Oriented and Cloud Computing,
pages 207–215. Springer International Publishing.
Binz, T., Breitenb
¨
ucher, U., Kopp, O., and Leymann, F.
(2014). TOSCA: Portable Automated Deployment
and Management of Cloud Applications. Advanced
Web Services, pages 527–549.
Brogi, A., Rinaldi, L., and Soldani, J. (2018). Tosker: A
synergy between tosca and docker for orchestrating
multicomponent applications. Software: Practice and
Experience, 48(11):2061–2079.
Calcaterra, D., Cartelli, V., Di Modica, G., and Tomarchio,
O. (2017). Combining TOSCA and BPMN to En-
able Automated Cloud Service Provisioning. In Pro-
ceedings of the 7th International Conference on Cloud
Computing and Services Science (CLOSER 2017),
pages 159–168, Porto (Portugal).
Calcaterra, D., Cartelli, V., Di Modica, G., and Tomarchio,
O. (2018). Exploiting BPMN features to design a
fault-aware TOSCA orchestrator. In Proceedings of
the 8th International Conference on Cloud Comput-
ing and Services Science (CLOSER 2018), pages 533–
540, Funchal-Madeira (Portugal).
Dikaiakos, M. D., Katsaros, D., Mehra, P., Pallis, G., and
Vakali, A. (2009). Cloud Computing: Distributed
CLOSER 2020 - 10th International Conference on Cloud Computing and Services Science
136

Internet Computing for IT and Scientific Research.
IEEE Internet Computing, 13(5):10–13.
Duan, Y., Fu, G., Zhou, N., Sun, X., Narendra, N. C., and
Hu, B. (2015). Everything as a Service (XaaS) on the
Cloud: Origins, Current and Future Trends. In 8th
International Conference on Cloud Computing, pages
621–628.
Kehrer, S. and Blochinger, W. (2018). TOSCA-based con-
tainer orchestration on Mesos. Computer Science -
Research and Development, 33(3):305–316.
Kiss, T., Kacsuk, P., Kovacs, J., Rakoczi, B., Hajnal, A.,
Farkas, A., Gesmier, G., and Terstyanszky, G. (2019).
MiCADO—Microservice-based Cloud Application-
level Dynamic Orchestrator. Future Generation Com-
puter Systems, 94:937 – 946.
Marston, S., Li, Z., Bandyopadhyay, S., Zhang, J., and
Ghalsasi, A. (2011). Cloud computing — the business
perspective. Decision Support Systems, 51(1):176 –
189.
OASIS (2013). Topology and Orchestration Specification
for Cloud Applications Version 1.0. http://docs.oasis-
open.org/tosca/TOSCA/v1.0/os/TOSCA-v1.0-
os.html. Last accessed: 2019-12-23.
OASIS (2019). TOSCA Simple Profile in YAML Version
1.2. https://docs.oasis-open.org/tosca/TOSCA-
Simple-Profile-YAML/v1.2/TOSCA-Simple-Profile-
YAML-v1.2.html. Last accessed: 2019-12-23.
Pahl, C. (2015). Containerization and the PaaS Cloud. IEEE
Cloud Computing, 2(3):24–31.
Petcu, D. and Vasilakos, A. (2014). Portability in Clouds:
Approaches and Research Opportunities. Scalable
Computing: Practice and Experience, 15(3):251–270.
Ruan, B., Huang, H., Wu, S., and Jin, H. (2016). A Per-
formance Study of Containers in Cloud Environment.
In Wang, G., Han, Y., and Mart
´
ınez P
´
erez, G., ed-
itors, Advances in Services Computing, pages 343–
356, Cham. Springer International Publishing.
Sysdig (2019). Sysdig 2019 container usage re-
port. https://sysdig.com/blog/sysdig-2019-container-
usage-report/. Last accessed: 2019-12-23.
Weerasiri, D., Barukh, M. C., Benatallah, B., Sheng, Q. Z.,
and Ranjan, R. (2017). A Taxonomy and Survey
of Cloud Resource Orchestration Techniques. ACM
Comput. Surv., 50(2):26:1–26:41.
Enabling Container Cluster Interoperability using a TOSCA Orchestration Framework
137
