
Modelling and Visualization of Robot Coalition Interaction through
Smart Space and Blockchain
Alexander Smirnov and Nikolay Teslya
a
SPIIRAS, 39 14th Line, St. Petersburg, Russia
Keywords: Coalition, Visualization, Modelling, Robot, Intelligent Agent, Blockchain, Smart Space.
Abstract: Nowadays the study of interaction models of intelligent agents is one of the main directions in the field of
joint task solving. It includes studies of coalition formation principles, tasks decomposition and distribution,
winnings sharing, and implementation of proposed techniques and models. This work focuses on ensuring the
interaction of coalition members through distributed ledger technology and smart contracts using Hyperledger
Fabric platform, as well as modeling and visualizing the interaction of intelligent robots using open software
Gazebo and Robotic Operation System. The ontology of context used to adjust robot actions is presented. It
combines environmental characteristics with robots and tasks descriptions to provide full situation context.
The paper presents a modelling approach architecture with an example of modelling and visualization based
on obstacle overcoming scenario.
1 INTRODUCTION
Оne of the main directions in the field of collective
work of robots is the study of interaction models of
intelligent agents (Bayram & Bozma, 2015; Vig &
Adams, 2005). Interaction of agents is most often
required when solving a problem that cannot be
solved by the efforts of one agent due to the lack of
its capabilities. In this case, the task is divided into
several independent subtasks. Each of them is then
assigned to a separate agent (Bayram & Bozma, 2015;
Cui, Guo, & Gao, 2013). The importance and
relevance of these studies is due to the development
of robotic systems in which each individual robot can
be considered as an independent intelligent agent. A
robot can make decisions to achieve its own goals and
a common goal. This interaction model is also called
a coalition. A wide range of tasks in the development
of coalition interaction models lies in the field of
models that provide the most optimal choice of
participants in a collective solution to the problem
and ensure the interaction of coalition members
(Dukeman & Adams, 2017; Klusch & Gerber, 2002).
The formation of a coalition and the joint solution
of tasks by robots can be demonstrated in most detail
within the following subject areas: precision
a
https://orcid.org/0000-0003-0619-8620
agriculture, remote planet exploration, emergency
medicine. In all these areas, many high specialized
robots have been developed. They effectively solve a
limited set of tasks within the framework of the
conditions for which they were developed. For
example, to solve the problem of precision
agriculture, there are robots that can conduct soil
quality exploration, automated seeders, cultivators,
tractors, etc.
However, to solve a complex problem that goes
beyond the conditions of each robot, it is required to
provide platform for their joint work. To ensure the
full cycle of growing crops, it is necessary to
successively solve the problems of field exploration,
selection of crops grown, sowing, watering and
harvesting. To do this, it is required to form a
coalition of robots in such a way as to solve a complex
common problem with the maximum overall
effectiveness of the coalition. Efficiency calculating
for different subject areas depends on the gain that
can be obtained when solving the problem: the
maximum harvest for precision agriculture, the
number of people rescued for disaster medicine, and
the total amount and time spent on obtaining,
processing and transmitting information about the
state of the monitored objects of interest for remote
sensing tasks.
278
Smirnov, A. and Teslya, N.
Modelling and Visualization of Robot Coalition Interaction through Smart Space and Blockchain.
DOI: 10.5220/0009413102780286
In Proceedings of the 22nd International Conference on Enterprise Information Systems (ICEIS 2020) - Volume 2, pages 278-286
ISBN: 978-989-758-423-7
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

The solution of the coalition formation problem
with the mathematical theory of fuzzy cooperative
games was presented in a previous work by the
authors (Smirnov, Sheremetov, & Teslya, 2019). This
work focuses on the secure interaction of coalition
members through distributed ledger technology and
smart contracts using Hyperledger Fabric platform, as
well as modeling and visualizing the interaction of
intelligent robots with open software Gazebo and
Robotic Operation System.
The paper is structured as follows. Section 2
discusses the existing forms of coalitions and
methods for modeling and visualizing their
interaction. Section 3 presents a coalition interaction
model based on the concept of smart spaces,
including a description of the ontology-based context
model used to form the coalition. Section 4 presents
the architecture for the coalition members interaction
through a distributed ledger. Section 5 shows the
architecture and an example of visualizing the
interaction of coalition members using robots’
models and simulating the physical world in the
Gazebo environment. Section 6 concludes the article
and provides directions of future work.
2 RELATED WORK
Currently, the main research directions of solving the
problem of coalition work of intelligent robots are the
following: organization of a coalition, information
exchange between coalition members, distribution of
tasks and resources between coalition members.
Two major areas can be distinguished in the
process of a coalition organizing: centralized and
decentralized. The centralized organization of the
coalition is characterized by the presence of a control
center at which decisions are made on the
composition of the coalition, the distribution of tasks,
and forming a plan for solving the problem. In this
case, the control center can be represented either as a
separate high-powered computing device that
performs only the functions of the center, and a robot
that performs tasks along with the rest (Smirnov,
Kashevnik, & Ponomarev, 2015). In this case, the
structure of the coalition can be multilevel
hierarchical, in which robots at each underlying level
obey only one center of their superior level (Guerrero,
Oliver, & Valero, 2017). The decentralized
organization of the coalition usually implies the
absence of a decision center, often focusing on bio-
inspired methods of organizing collaboration, such as
swarms and flocks (Koes, Nourbakhsh, & Sycara,
2005; Yu & Cai, 2009). At the same time, robots
equal in hierarchy and all of them use same
algorithms when making a decision.
The information exchange between coalition
members is an important component of the joint
problem solving by coalition, since it requires
notification of coalition members about the current
state of the problem solution for organizing
coordinated actions, or monitoring the
implementation of the plan (Verma, Desai, Preece, &
Taylor, 2017). The information exchange can be
organized through a common centralized repository
of information on a separate device or by the
distribution of information between coalition
members (Shabanov & Ivanov, 2019). It also
considers the combination of two approaches with the
formation of so-called smart spaces - a common
repository of information that provides links to
resources that are coalition members, which makes
information distributed among all participants
(Ferrer, 2019). There are also solutions based on
peer2peer networks and a distributed ledger that
provide quick distribution of information between all
participants, while duplicating all the information on
the device of each participant (Liang & Xiao, 2010;
Qian & Cheng, 2018). The distributed ledger
technology can be viewed as an example of P2P
networks. In addition to benefits of P2P network, the
distributed ledger solutions also provide immutability
of information, which can be useful when organizing
a coalition with the requirement to ensure trust
between the participants without a single certification
center (Liang & Xiao, 2010).
The type of coalition organization also influences
how tasks and resources are distributed among
coalition members. Centralized hierarchical
coalitions usually organize work through centralized
planning when receiving a task. At higher nodes, a
work plan is built taking into account the capabilities
of lower nodes and coalition resources, in which the
performers and the procedure for solving problems
are fixed (Smirnov, Kashevnik, Teslya, Mikhailov, &
Shabaev, 2015). This ensures that the stages of the
plan and the entire plan are completed by a certain
date with an accurate forecast of the expenditure of
resources and the payment of remuneration, if this is
provided for by the conditions of the task. However,
this solution is not flexible, because when an
emergency occurs, it leads to a deviation from the
plan, with the need for its correction or complete
reorganization. Decentralized coalitions are based on
the adaptation of participants to current conditions,
with the absence of a single plan for solving the
problem (Hartanto & Eich, 2014; Tosello, Fan,
Castro, & Pagello, 2017). This provides the flexibility
Modelling and Visualization of Robot Coalition Interaction through Smart Space and Blockchain
279

to solve the problem under frequent changes in the
composition of the coalition or available resources,
but limits the ability to predict the time of solving the
problem (Ivanov, 2019).
Simulation and visual modeling of the interaction
of robots is also very important task. Both of them are
greatly simplifies hypothesis testing by reducing
development costs, and allow to visually present the
results of the proposed approaches. Some researchers
develop their own visualizations, displaying robots
with conventional signs, since the tasks under
consideration do not require detailed design of the
robot (Koes et al., 2005). For detailed visualization,
the Gazebo visualization package is most often used
in combination with the control code of the robot
operating system (Robot operation system, ROS) for
controlling a virtual robot (Barbosa, Duberg, Jensfelt,
& Tumova, 2019; Suárez-Figueroa, 2012; Xue, Tang,
Su, & Li, 2019).
In summary it can be noted that nowadays the
main attention is paid to the creation of decentralized
coalitions of robots to solve complex common
problems. The distribution of tasks and resources
between them should be carried out based on
decentralized planning to adapt to the changing
context of the task, while robots take part in solving
the problem considering their functionality and
available resources, such as battery power or device
lifetime. The interaction and exchange of information
between robots should be carried out through a
common repository. Taking into account the recent
studies two approaches towards decentralization can
be viewed: P2P model, and the use of distributed
ledgers. If it is not possible to test interaction models
on real robots, visualization environments should be
used to model robots and their actions. The most
commonly used bundle is the Gazebo simulation
environment, together with the robotics operating
system (ROS), which implements the robots
functionality.
3 INTERACTION OF
COALITION PARTICIPANTS
Robots interact through the cyberphysical framework
described previously in work (Smirnov et al., 2019).
The framework is based on the smart cyberphysical
space (based on the “blackboard”) and blockchain. It
provides the ability to organize basic interaction of
robots in the physical and cyber (virtual) spaces. The
interaction includes solo and joint manipulations with
physical objects, information exchange about the
current state of robots and objects for planning further
joint actions during the coalition formation.
Coalition members can be robots of different
manufacturers with different equipment,
environmental sensors, and software modules. For
their interaction, it is important to ensure semantic
interoperability. This allows to specify a description
of the properties of the coalition members and context
in a format that is understandable to everyone, from
machines to the system’s operators, as well as
automate the search for coalition members in
accordance with the requirements for the task. An
ontology is used to ensure semantic interoperability.
The model of the context, the coalition participant and
tasks is described using the ontological modeling
apparatus, which allows context-driven dynamic
formation of the coalition and the distribution
(redistribution) of tasks, roles and system resources
taking into account not only competencies, but also
the current situation in the coalition.
To build an ontological model of the context, the
main scenarios of robots interaction, robot designs,
and typical tasks that each type of robot solves for
disaster medicine, precision farming, and remote
sensing of the Earth had been analyzed. As a result,
the basic concepts that should be present in the
ontology were identified, among which three groups
stand out: i) concepts for the current situation; ii)
concepts for the design and functions of the robot; iii)
concepts for the requirements and conditions for
solving specific problems posed to a given group of
robots.
The ontology graph for context is presented on
Figure 1. For the current situation, the concepts
describe the physical parameters of the environment
(for example, temperature, wind speed and direction,
humidity, current time, atmospheric pressure for
precision farming and disaster medicine, for remote
sensing - the tactical and technical characteristics of
onboard target and supporting equipment, potential
areas of interaction with objects observation and
ground-based points for receiving Earth remote
sensing data, light level, solar activity, radiation level,
quality indicators of function observation of
spacecraft, etc.), the position of all the coalition
robots, the position and properties of objects in the
field of action of the coalition.
Ontology concepts for describing the design and
functions of the robot provide characteristics of the
hardware and software components of the robot
(number, types, measuring ranges and current sensor
readings, number, types, current position of motors,
state and current battery charge, fuel level (if there is
a
fuel tank) computing power (CPU frequency, the
ICEIS 2020 - 22nd International Conference on Enterprise Information Systems
280
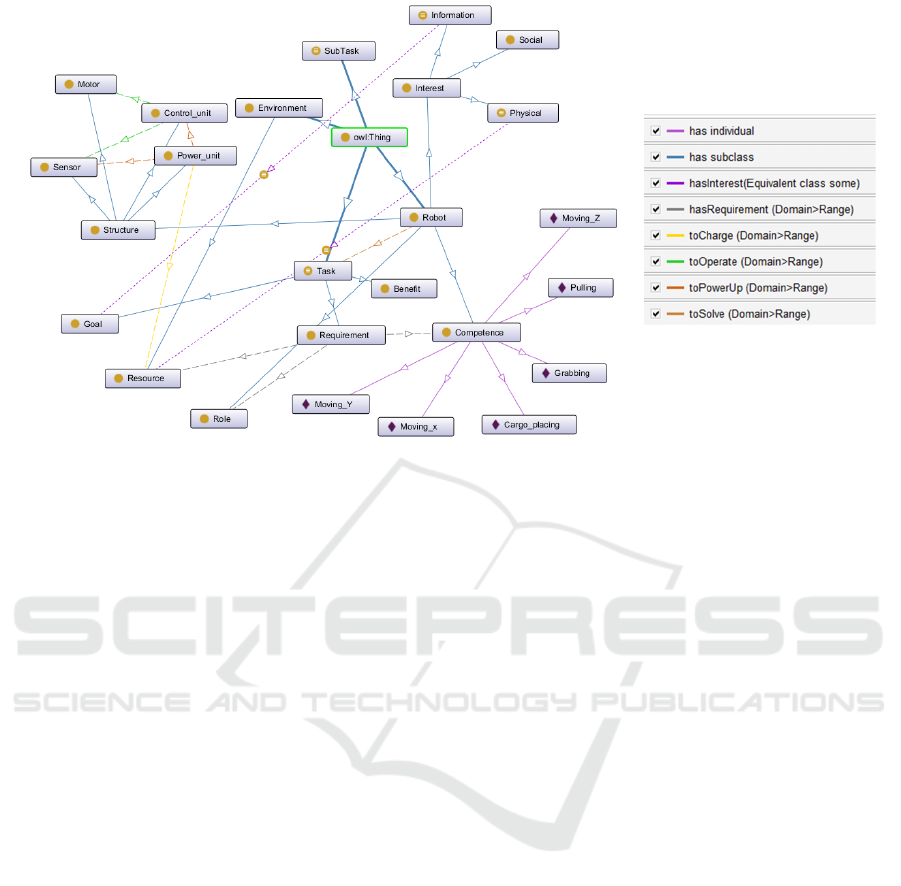
Figure 1: Context ontology.
amount of RAM, data storage, connection to data
networks, information about the characteristics of the
selected GNSS)) and many components (installed
libraries, software modules, platforms, control code
for hardware, action templates), as well as a
description of the functions and possible technologies
that the robot can perform using its hardware and
software. The concepts of the developed ontology are
synchronized with the ontology defined by the
standard 1872-2015 - IEEE Standard Ontologies for
Robotics and Automation (IEEE Robotics and
Automation Society, 2015) to ensure interoperability
while expanding the range of subject areas and the
composition of coalition members.
Ontology concepts related to the task description
and task requirements determine the types of tasks,
the resources needed to solve them, the requirements
for the functional equipment of robots, as well as the
possible structures for dividing tasks solved by
coalition of robots into sub-tasks.
4 COALITION MEMBERS
INTERACTION THROUGH
BLOCKCHAIN
Some platforms that implement blockchain
technology can be extended by the use of smart
contracts to provide new capabilities of ledger
processing. For the purpose of coalition participant
interaction, a smart contract within blockchain
technology is viewed as a decentralized application
available to all coalition participants.
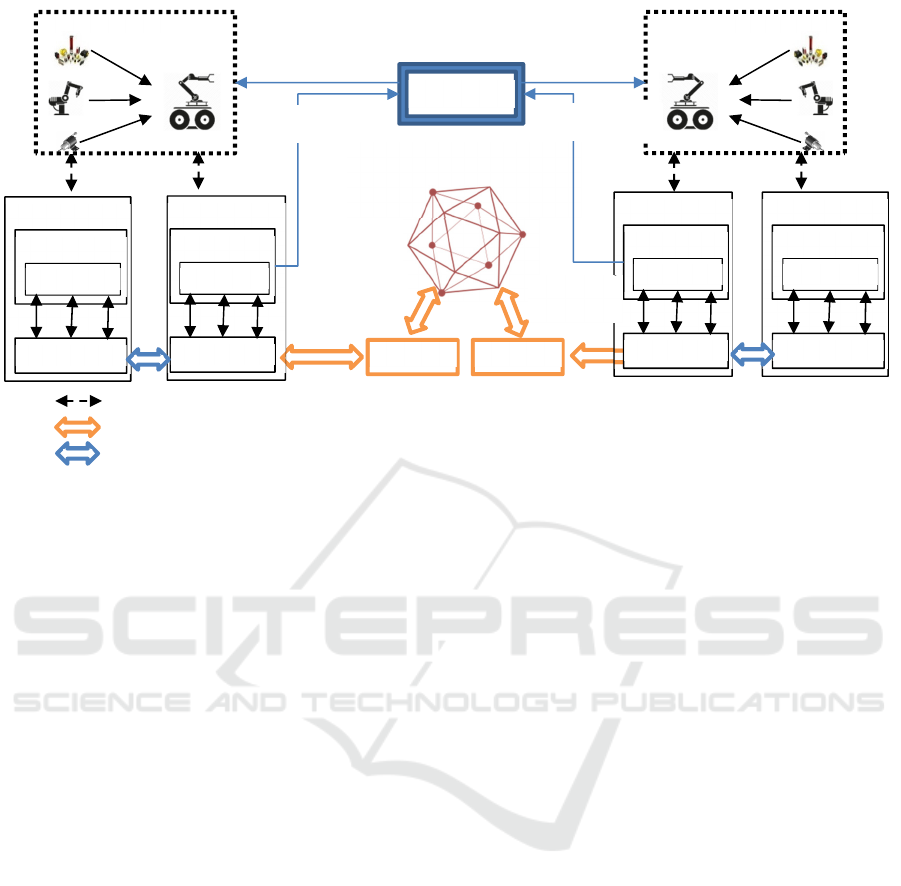
In this work the Hyperledger Fabric platform has
been chosen for blockchain network and smart
contacts implementation. The choice is justified by
the specifics of architecture, which makes it easy to
adapt the coalition structure into the platform
structure (see Fig. 2). The main elements of the
architecture are nodes of three levels: “Client”,
“Peer”, “Orderer”. Client level corresponds to robots
whose main task is to send data from sensors, or to
perform operations and report on their performance.
In case of precision farming, such robots can be tools
of combine harvester, scouts, and transport robots. On
the higher lever, there are devices that collect
information and execute the smart contracts - “Peer”.
The example of peer is a control block of combine
harvester. Their main task is to collect information
from the lower level, process it using smart contracts
and transfer it to the upper level, in which information
will be disseminated and stored. The highest level is
“Orderer”. Its task is to store information in the
appropriate chain of blocks, to ensure the
coordination and distribution of the new block
between other Orderers and corresponding Peers.
All changes of coalition state are reflected in the
smart space using adding/deleting relevant
information according to the in the ontology. During
the interaction between coalition participants through
the IoT platform with the blockchain support, all
smart contacts can be called either directly through
the transaction initiation interface in the blockchain
Modelling and Visualization of Robot Coalition Interaction through Smart Space and Blockchain
281
or using other smart contacts methods. To simplify
the use of custom protocols in blockchain, the method
of any contract placed in the contract chains should
be called using the basic smart contract.
For this purpose, a basic smart contract was
developed, which provides the following functions of
interaction between coalition participants:
1. Coalition schedule upload using XML format.
It provides receiving and parsing the plan; generating
entries in the blockchain from the extracted items of
robots, tasks associated with robots, the order of the
task execution, and the timing of each task; sending
notification to the blackboard through blockchain
knowledge processor to start the plan execution.
2. Start the task execution. Accept a message from
the robot about the start of the task execution, store
the moment of the real start of execution in the
blockchain, verify with the planned one, and store the
fact in case of a strong deviation.
3. Completion of the task. Same as with the start
the contract provides function to get notification,
check correctness of execution and store this fact to
the ledger. In case of a strong deviation from the plan,
this fact is stored to the blockchain and notification
about the failure of the plan is sent to other coalition
members through the smart space.
The basic smart contract is available through the
REST API so each robot can access the schedule
without direct connection to the blockchain just using
HTTP protocol. In addition, a simple web page is
available for a human operator to check the coalition
state and follow the process of joint task solving.
5 VISUALIZATION
ARCHITECTURE AND
COALITION INTERACTION
EXAMPLE
For the experiments, a scenario of coalitional
interaction of robots was implemented to jointly
overcome obstacles in a Gazebo modeling
environment (Agüero et al., 2015; Koenig & Howard,
2004) with ROS Melodic framework (Stanford
Artificial Intelligence Laboratory et.al., 2018) (see
Figure 3). The use of the above software is currently
widespread in the field of robotic modeling and
includes a diverse library of elements and off-the-
shelf devices, which can significantly reduce model
development time. Due to the possibility of
connecting third-party models, it is also possible to
quickly create a three-dimensional physical world
that simulates the real world with automatic object
collision calculation, environmental physical
parameters. This feature allows to faithfully display
the physical world and take into account a large
number of parameters during modeling.
Using the ROS operating system also has several
advantages. The first is that this operating system
supports the basic functions of real-life robots related
Orderer
HyperLedger Fabric
blockchain with Smart Space
Coalition 1
Main Robot
Figure 2: Coalition members’ interaction through HyperLedger Fabric with Smart Space support.
Correspondence of coalition members with Hyperledger concepts
Interaction through blockchain and Smart Space
Interaction through smart contracts call
Gazebo
Robot Client 1
ROS
KP client
Channels
Robot Peer 1
ROS
KP Pee
r
Channels
Coalition n
Main
Robot Client n
ROS
KP client
Channels
Robot Peer n
ROS
KP Pee
r
Channels
draw
draw
Orderer
Sensors data,
tasks, schedule
Current state
Current state
Sensors data,
tasks, schedule
ICEIS 2020 - 22nd International Conference on Enterprise Information Systems
282
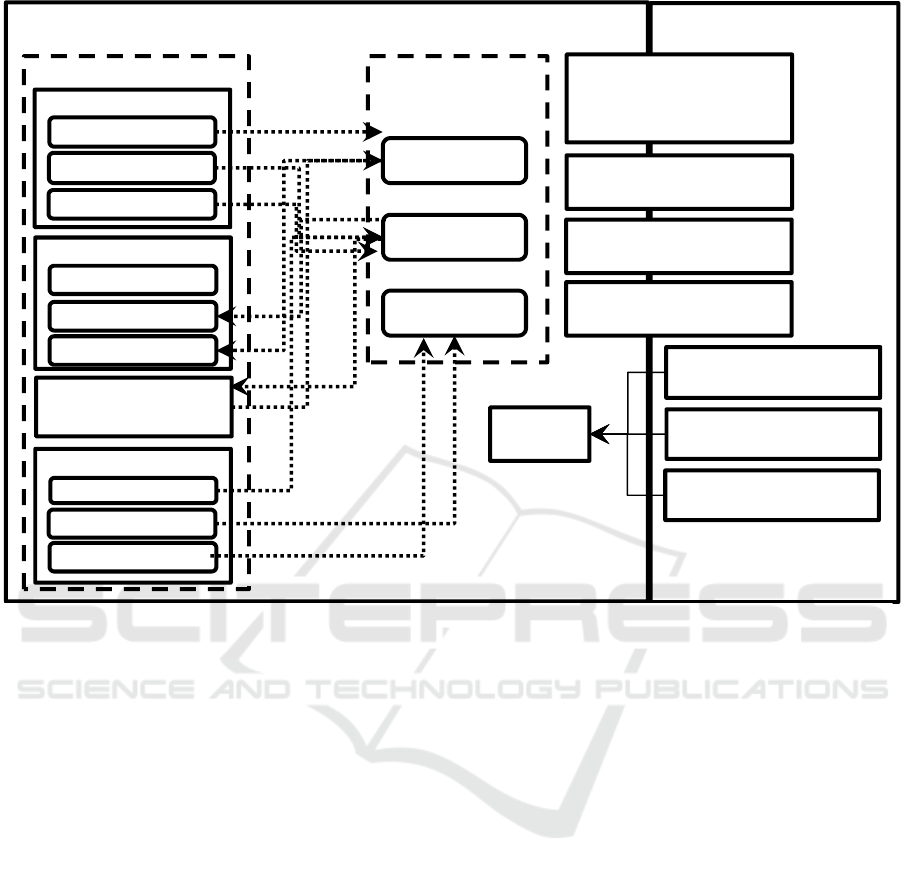
to controlling servo drives, receiving data from
sensors and exchanging data with the external
environment through an accessible communication
channel. Interaction between robots is carried out
through specially organized channels in the operating
system, to which a program can be subscribed and
receive sensor readings from them or send control
commands. In the presented architecture, the robot
knowledge processor (KP) subscribes to channels and
transmits messages from the robot to the smart space
and blockchain using the ontology, as well as receives
back the task that needs to be completed, and the
schedule and controls the actions of the robot.
The second important advantage is the ability to
integrate ROS both in existing robots and in robot
models created in the Gazebo simulation
environment. This allows to develop a model of
robots interaction in the virtual world and then, with
minimal changes, transfer it to physical robots, and
due to high-quality simulation of the physical world
conditions, many features of the physical
environment will be taken into account during virtual
implementation and estimation.
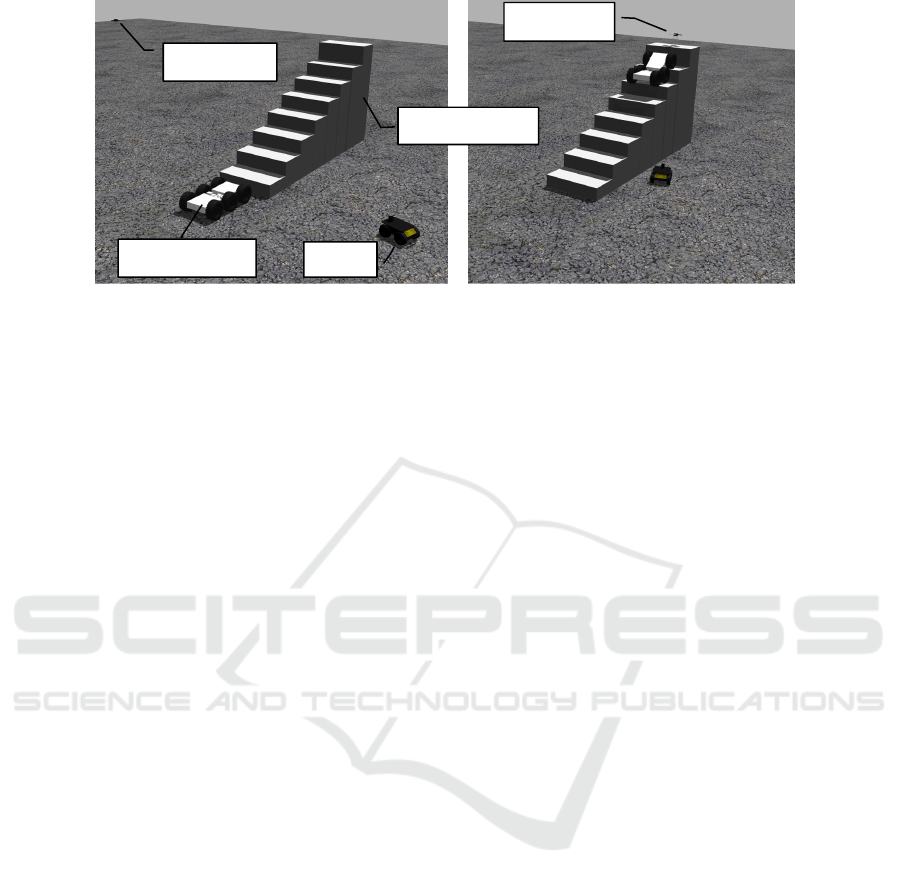
The following robot models were developed to
implement the scenario (see Figure 4): all-terrain
robot, quadcopter, and scout.
All-terrain robot has the following characteristics:
six wheels, three independent parts (front, center and
back). The front and back parts have lift mechanisms
that allows to rise or down parts of robots to overcome
obstacles. On the front and back parts of the robot
there are laser distance sensors to measure the
distance to objects, directed in parallel to the surface
on which the robot moves. The robot is equipped with
a coordinate sensor (GPS/GLONASS in real robot)
for tracking location.
Quadcopter robot has the functionality of a
standard quadcopter for moving in three-dimensional
space. The robot is equipped with a laser distance
sensor to scan for obstacles and is directed downward
perpendicular to the plane of rotation of the rotors.
Same as all-terrain robot the quadcopter is equipped
with a coordinate sensor for tracking location. The
quadcopter model, which implements the quadcopter
robot functionality, was implemented based of the
hector_quadrotor free model package (Meyer,
Sendobry, Kohlbrecher, Klingauf, & Von Stryk,
2012, 2018).
Scout robot is a four-wheel mobile robot with the
function of moving on a two-dimensional surface
Robotic Operation System
Gazebo Simulator
gazebo_ros_pkgs (interface for
connecting ROS and Gazebo
simulator)
Quadcopter
All-terrain robot
.launch files
Quadcopter model (SDF and
URDF)
All-terrain robot model (SDF
and URDF)
Environment and obstacle
model (SDF)
Control modules /
User software
goToLocation.py
publishTask.py
scanObject.py
Message channels
Location
Quadcopter
All-terrain robot
Movement
Quadcopter
All-terrain robot
Task scheduler
Sensors
Q
uadco
p
te
r
All-terrain robo
t
Robots and world
description
Visualization interface
Scout
Scout
Scout
Scout
Figure 3: Software architecture for robot interaction visualization.
Modelling and Visualization of Robot Coalition Interaction through Smart Space and Blockchain
283
without huge obstacles. The robot is equipped with
laser distance sensors located around the perimeter of
the body to scan the space around the robot. The robot
is also equipped with a coordinate sensor for tracking
location. Scout robot model was implemented based
on the husky_gazebo package (Gariepy, Mukherjee,
Bovbel, & Ash, 2019).
The transmission of control signals to the robot
and the receipt of data from the sensors is carried out
through subscription to the channels in ROS
associated with the equipment of the robots. For
example, for the all-terrain robot, channels have been
created through which data from the distance sensor
and coordinates can be received and independent
control actions to each of the robot servos can be sent.
For each of the servos, it is also possible to obtain its
status by accessing the corresponding channel.
6 CONCLUSIONS
The paper provides modelling of the scenario of joint
problem solving by robots’ coalition proposed early
by the authors. The modelling is based on the open
source packages Gazebo and ROS that are de-facto
standards of virtual environments modelling in
visualization in the field of robotics. The interaction
between robots is implemented based on the smart
space combined with the blockchain platform.
To describe the environment the ontological
model of context has been developed. The ontological
model provides the concretization of the parameters
that can be used to describe the context of the joint
problem solving in various fields, including precision
agriculture, disaster medicine, and remote sensing of
the Earth. The benefit of ontological context model is
in easy adaptation to other areas by supplementing it
with concepts that describe the current situation,
specific to these areas, while maintaining the context
in terms of describing the structure and functions of
robots and tasks.
The visualization shows simple scenario of three
robot cooperation for obstacle overcoming. Selection
of tools for visualization and communication between
robots shows how they can be combined for
modelling scenarios of robot cooperation. This result
can be further scaled to implement more complex
scenario of precision agriculture that requires
implementation of physical world, robot models, and
providing secure interaction between them. The
interaction will include secured interoperation
through blockchain and cyber-physical space,
coalition formation, and rescheduling of complex
problem solving.
The future work will be focused in precision
agriculture scenario implementation and performance
estimation to prove that the proposed solution is
appropriate for this kind of tasks.
ACKNOWLEDGEMENTS
This research was funded by Russian State Research
No. 0073-2019-0005 in the sections 2 and 3 of cyber-
physical system organization, and by RFBR Grant
No. 17-29-07073 in the sections 4 and 5 of robot
interoperation through blockchain.
REFERENCES
Agüero, C. E., Koenig, N., Chen, I., Boyer, H., Peters, S.,
Hsu, J., … Pratt, G. (2015). Inside the Virtual Robotics
Challenge: Simulating Real-Time Robotic Disaster
Response. IEEE Transactions on Automation Science
and Engineering, 12(2), 494–506. https://doi.org/
10.1109/TASE.2014.2368997
Quadcopter
Quadcopter
Scou
t
All-terrain robot
Obstacle model
Figure 4: Visualization of robots interaction with Gazebo and ROS (left side– initial scenario stage, right side – final stage).
ICEIS 2020 - 22nd International Conference on Enterprise Information Systems
284

Barbosa, F. S., Duberg, D., Jensfelt, P., & Tumova, J.
(2019). Guiding Autonomous Exploration With Signal
Temporal Logic. IEEE Robotics and Automation
Letters, 4(4), 3332–3339. https://doi.org/
10.1109/lra.2019.2926669
Bayram, H., & Bozma, H. I. (2015). Coalition formation
games for dynamic multirobot tasks. International
Journal of Robotics Research, 35(5), 514–527.
https://doi.org/10.1177/0278364915595707
Cui, R., Guo, J., & Gao, B. (2013). Game theory-based
negotiation for multiple robots task allocation.
Robotica, 31(6), 923–934. https://doi.org/10.1017/
S0263574713000192
Dukeman, A., & Adams, J. A. (2017). Hybrid mission
planning with coalition formation. Autonomous Agents
and Multi-Agent Systems, 31(6), 1424–1466.
https://doi.org/10.1007/s10458-017-9367-7
Ferrer, E. C. (2019). The blockchain: A new framework for
robotic swarm systems. Advances in Intelligent Systems
and Computing, 881, 1037–1058. https://doi.org/
10.1007/978-3-030-02683-7_77
Gariepy, R., Mukherjee, P., Bovbel, P., & Ash, D. (2019).
GitHub - husky/husky: Common packages for the
Clearpath Husky. Retrieved January 6, 2020, from
https://github.com/husky/husky
Guerrero, J., Oliver, G., & Valero, O. (2017). Multi-Robot
Coalitions Formation with Deadlines: Complexity
Analysis and Solutions. PLOS ONE, 12(1), 1–26.
https://doi.org/10.1371/journal.pone.0170659
Hartanto, R., & Eich, M. (2014). Reliable, cloud-based
communication for multi-robot systems. 2014 IEEE
International Conference on Technologies for Practical
Robot Applications (TePRA), 1–8. https://doi.org/
10.1109/TePRA.2014.6869142
IEEE Robotics and Automation Society. (2015). IEEE
Standard Ontologies for Robotics and Automation.
https://doi.org/10.1109/IEEESTD.2015.7084073
Ivanov, D. (2019). Decentralized planning of intelligent
mobile robot’s behavior in a group with limited
communications. In Advances in Intelligent Systems
and Computing (Vol. 875). https://doi.org/
10.1007/978-3-030-01821-4_44
Klusch, M., & Gerber, A. (2002). Dynamic coalition
formation among rational agents. IEEE Intelligent
Systems, 17(3), 42–47. https://doi.org/10.1109/
MIS.2002.1005630
Koenig, N., & Howard, A. (2004). Design and use
paradigms for Gazebo, an open-source multi-robot
simulator. 2004 IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS), 3, 2149–2154.
https://doi.org/10.1109/iros.2004.1389727
Koes, M., Nourbakhsh, I., & Sycara, K. (2005).
Heterogeneous multirobot coordination with spatial and
temporal constraints. AAAI Workshop - Technical
Report,
WS-05-06, 9–16.
Liang, X., & Xiao, Y. (2010). Studying bio-Inspired
coalition formation of robots for detecting intrusions
using game theory. IEEE Transactions on Systems,
Man, and Cybernetics, Part B: Cybernetics, 40(3),
683–693. https://doi.org/10.1109/
TSMCB.2009.2034976
Meyer, J., Sendobry, A., Kohlbrecher, S., Klingauf, U., &
Von Stryk, O. (2012). Comprehensive simulation of
quadrotor UAVs using ROS and Gazebo. Lecture Notes
in Computer Science (Including Subseries Lecture
Notes in Artificial Intelligence and Lecture Notes in
Bioinformatics), 7628 LNAI, 400–411. https://doi.org/
10.1007/978-3-642-34327-8_36
Meyer, J., Sendobry, A., Kohlbrecher, S., Klingauf, U., &
Von Stryk, O. (2018). GitHub - tu-darmstadt-ros-
pkg/hector_quadrotor: hector_quadrotor contains
packages related to modeling, control and simulation of
quadrotor UAV systems. Retrieved January 5, 2020,
from https://github.com/tu-darmstadt-ros-pkg/
hector_quadrotor
Qian, B., & Cheng, H. H. (2018). Bio-Inspired Coalition
Formation Algorithms for Multirobot Systems. Journal
of Computing and Information Science in Engineering,
18(2), 1–8. https://doi.org/10.1115/1.4039638
Shabanov, V., & Ivanov, D. (2019). Organization of
information exchange in coalitions of intelligent mobile
robots. 2019 International Conference on Industrial
Engineering, Applications and Manufacturing,
ICIEAM 2019, 1–5. https://doi.org/10.1109/
ICIEAM.2019.8743043
Smirnov, A., Kashevnik, A., & Ponomarev, A. (2015).
Multi-level self-organization in cyber-physical-social
systems: Smart home cleaning scenario. Procedia
CIRP, 30, 329–334. https://doi.org/10.1016/
j.procir.2015.02.089
Smirnov, A., Kashevnik, A., Teslya, N., Mikhailov, S., &
Shabaev, A. (2015). Smart-M3-based robots self-
organization in pick-and-place system. 2015 17th
Conference of Open Innovations Association (FRUCT),
2015-June(June), 210–215. https://doi.org/10.1109/
FRUCT.2015.7117994
Smirnov, A., Sheremetov, L., & Teslya, N. (2019). Fuzzy
cooperative games usage in smart contracts for dynamic
robot coalition formation: Approach and use case
description. ICEIS 2019 - Proceedings of the 21st
International Conference on Enterprise Information
Systems, 1, 349–358. https://doi.org/10.5220/
0007763003610370
Stanford Artificial Intelligence Laboratory et.al. (2018).
ROS.org | Powering the world’s robots. Retrieved
January 5, 2020, from https://www.ros.org/
Suárez-Figueroa, M. C. (2012). Ontology engineering in a
networked world. Springer.
Tosello, E., Fan, Z., Castro, A. G., & Pagello, E. (2017).
Cloud-Based Task Planning for Smart Robots. In
Intelligent Autonomous Systems 14, Advances in
Intelligent Systems and Computing (Vol. 531, pp. 285–
300). https://doi.org/10.1007/978-3-319-48036-7_21
Verma, D., Desai, N., Preece, A., & Taylor, I. (2017). A
block chain based architecture for asset management in
coalition operations. In T. Pham & M. A. Kolodny
(Eds.), Proc. SPIE 10190, Ground/Air Multisensor
Interoperability, Integration, and Networking for
Modelling and Visualization of Robot Coalition Interaction through Smart Space and Blockchain
285

Persistent ISR VIII (p. 101900Y). https://doi.org/
10.1117/12.2264911
Vig, L., & Adams, J. (2005). Issues in multi-robot coalition
formation. Multi-Robot Systems. From Swarms to
Intelligent Automata Volume III, III, 15–26.
https://doi.org/10.1007/1-4020-3389-3_2
Xue, F., Tang, H., Su, Q., & Li, T. (2019). Task Allocation
of Intelligent Warehouse Picking System based on
Multi-robot Coalition. KSII Transactions on Internet
and Information Systems, 13(7), 3566–3582.
https://doi.org/10.3837/tiis.2019.07.013
Yu, L., & Cai, Z. (2009). Robot exploration mission
planning based on heterogeneous interactive cultural
hybrid algorithm. 5th International Conference on
Natural Computation, ICNC 2009, 5, 583–587.
https://doi.org/10.1109/ICNC.2009.15
ICEIS 2020 - 22nd International Conference on Enterprise Information Systems
286
