
Safety and Dependability of Autonomous Systems in Container
Terminals: Challenges and Research Directions
Eetu Heikkilä
a
, Timo Malm
b
, Risto Tiusanen
c
and Toni Ahonen
d
VTT Technical Research Centre of Finland Ltd., Tampere, Finland
Keywords: Autonomous Port, Autonomous Systems, Container Logistics.
Abstract: Increasing use of autonomous machine systems is a major trend in port logistics, especially in container
handling. Over the past decades, large seaports have automated parts of their operations. Currently, also
smaller ports are looking to apply automated and autonomous solutions. This is expected to increase efficiency
and safety, but also to introduce new mixed-traffic situations between humans, manual machines and
machines of different levels of autonomy. This is likely to introduce safety risks and dependability challenges
for system development and operation. In this paper, we discuss selected key challenges that need to be solved
to ensure that autonomous container handling solutions can be implemented safely and profitably. We also
present topical research directions that are planned and ongoing to solve these challenges.
1 INTRODUCTION
Container terminals consist of different functional
areas and various container handling systems and
equipment. In the design of terminals, one key aspect
to consider is the potential for automation in the
different operations using a variety of machinery
types (Brinkmann, 2011). Over the past decades,
especially large seaports have been investing in
automation to increase efficiency of operations. To do
so, they often aim to automate large parts of terminal
operations at once, creating autonomous operating
zones that are physically isolated from manual
operations. Thus, the safety aspects can be controlled
with relative ease, as all access to the operating zone
of autonomous machines can be prevented.
In the future, also smaller terminals look for
increases in efficiency and safety through use of
automation and increasingly autonomous systems. In
smaller terminals, however, it is not usually feasible
to completely fence off the areas where autonomous
machines would operate. This potentially creates a
number of new scenarios where machinery of various
levels of autonomy may work simultaneously in the
same area with humans and different forms of
transportation. This kind of mixed-traffic operation
a
https://orcid.org/0000-0001-8259-0996
b
https://orcid.org/0000-0003-1612-3139
c
https://orcid.org/0000-0002-8717-7727
d
https://orcid.org/0000-0002-8735-7701
introduces many opportunities for increasing the
efficiency of operations, but it also brings along a
number of risks that need to be considered in
development. In this paper, we discuss selected key
challenges in developing autonomous port
machinery, and describe topical activities in research
towards solving these challenges.
1.1 Autonomous Systems for Port
Operations
Currently, there is no single agreed definition for
autonomy in the logistics or mobile machinery
sectors, but typically the term is defined based on the
system’s ability to achieve goals and operate
independently. Key characteristics for an autonomous
system are the ability to perceive surroundings using
sensors, plan actions according to the situational
awareness created by the sensor data, decide further
actions and act accordingly (Pendleton et al., 2017).
In many industries, categorizations have been
created to define different levels of autonomy. The
most widely known of such categorizations are the
ones described in automotive industry for road
vehicles, such as the driving automation levels
defined by SAE (2018). Based on the SAE levels for
528
Heikkilä, E., Malm, T., Tiusanen, R. and Ahonen, T.
Safety and Dependability of Autonomous Systems in Container Terminals: Challenges and Research Directions.
DOI: 10.5220/0009472505280534
In Proceedings of the 6th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2020), pages 528-534
ISBN: 978-989-758-419-0
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
driving automation, a categorization has also been
proposed for container terminal automation as
described in Table 1 (Hämäläinen et al., 2018).
Table 1: Automation levels proposed for machinery in
container terminals (adopted and modified from
Hämäläinen et al., 2018).
Level
Description
Level 0: Manual
operation with
process
automation
Human driver controls
machinery, but other
terminal processes are
improved using automation,
e.g. container identification
and tracking.
Level 1: Remote
control
Operator controls all
machinery moves from a
control centre. One operator
can control several
machines.
Level 2:
Supervised
automatic moves
Machines can perform some
defined moves automatically
under the continuous
supervision of a human
operator.
Level 3: Semi-
automated
operation
Most moves are automatic
and require less supervision,
only truck lane operations
and exception handling are
done by remote control.
Level 4: Fully
automated
operation
All operations are automated
and the human operator is
only needed for exception
handling.
In container handling, different concepts for
implementing automation systems of various levels
have been proposed and developed (PEMA, 2016).
These range from partial automation to fully
automated terminals. Electrification of machinery
also plays a major part in these developments. A
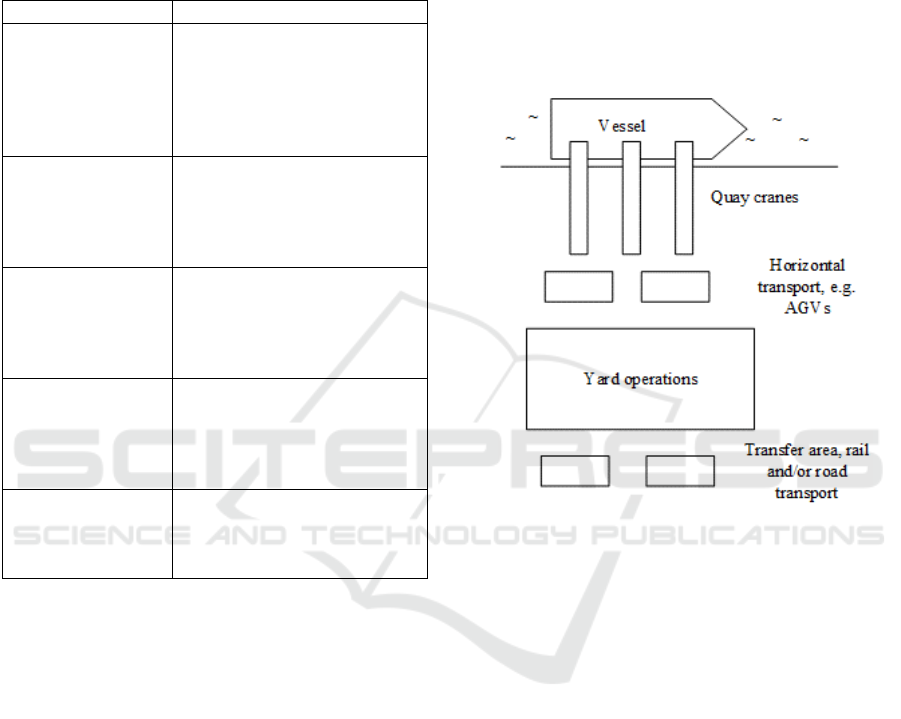
typical implementation of a current automated
container terminal is presented in Figure 1. The
system consists of machinery for loading and
unloading the ship, horizontal transport of the
containers to the actual container yard where the
containers are rearranged as needed. Additionally,
there are facilities for transferring the containers to
and from land transport, which may include both rail
and road transport.
In the future, increasingly autonomous machines
may be used flexibly to allow different layouts and
combinations of machines to achieve optimal
performance. For example, new machine types may
emerge that are able to conduct tasks in various parts
of the terminal. In most cases, it is likely that a human
remote operator will remain in a supervisory role
even when the level of autonomy increases (Tähtinen,
2018). In addition to the container handling
operations within the terminal, the interfaces to ship,
road and rail traffic also need to be considered in these
developments (Fiedler et al., 2019).
There are several benefits that are expected from
the use of autonomous machinery in small and mid-
sized terminals. For instance, it may enable
continuous operations whereas currently small
terminals may only work in specific shifts.
Figure 1: A simplified schematic of functions in a typical
automated container terminal. In small terminals, the
functions could be implemented differently, e.g. the amount
of different machine types utilized may be drastically
smaller.
Machine system developers aiming for
autonomous systems face a number of challenges
related to capabilities of designing and implementing
safe autonomous functionality (Vuorimaa, 2019). In
this paper, we introduce selected key safety and
dependability challenges machinery developers face
when aiming for increased level of autonomy
especially in mixed-traffic operations for container
handling. Specifically, we focus on the following
challenges identified by the authors in the ongoing
AUTOPORT (2020) project:
▪ Lack of safety standardization for
autonomous machinery in container
terminals (section 2.1).
▪ Identification and assessment of new
autonomy related uncertainties and safety
risks (section 2.2).
Safety and Dependability of Autonomous Systems in Container Terminals: Challenges and Research Directions
529

▪ Challenges in availability of enabling
technology, focusing especially on available
safety certified sensor technology for
outdoor use (section 2.2.1).
▪ Safety and dependability challenges caused
by the increasing software intensity of
machinery (section 2.2.2).
We also review some of the research directions
and solution proposals that are currently being
investigated within research & development activities
in the field of port logistics to pave the way towards
increasingly autonomous systems.
2 CHALLENGES OF
AUTONOMOUS SYSTEMS IN
CONTAINER TERMINALS
Autonomous systems introduce several new
challenges that need to be considered in different
phases of product development (Tiusanen, et al.,
2019a). In the following, we focus mainly on the
challenges related to the early concept design phases
of autonomous container handling machinery.
2.1 Safety Standards for Autonomous
Mobile Machinery
Lack of domain-specific standardization is a major
issue in development of autonomous machinery for
container handling. This can be seen to increase the
responsibility of the machine manufacturers, as
manufacturers need to be able find a suitable
framework of standards and methods to assure the
safety of new technologies.
Heath, T. (2018) has stated that the two main
aspects in the overall safety of machine autonomy
are: the lack of applicable standards, legislation and
guidelines regarding the autonomy of machines and
vehicles; and the paradox that arises from balancing
the desired level of autonomy with the needed level
of safety. This means that complex and advanced
autonomous machines are already technically
achievable, but they lack a common and thorough
method for ensuring an adequate level of safety.
One approach to compensate for the lack of
domain-specific standardization is to follow relevant
standards from other fields with similar
characteristics – mostly mobile machinery in other
types of outdoor environments. The available
standards, however, are not concise in their
approaches. Instead, different safety strategies are
preferred in different domains (Tiusanen et al.
2019b).
As an example of a standard specifically aimed
for autonomous systems, ISO 17757 is directed at
autonomous machine system safety in earth-moving
machinery. The basic principle presented in this
standard is that the autonomous area is restricted from
manual vehicles, but access control may allow
persons or manual machines to enter automated area
in special occasions. The special occasions are
defined and include e.g. tagged vehicles.
For driverless trucks there is also a standard and
a standard proposal, which describe autonomous
systems aimed for indoors use. In this case, the
autonomous system can be open (free access), but the
system is well defined and, in the open case, speed
limit is sufficiently low to enable stopping the
machine before collision.
For container handling, the challenge is that the
need is often somewhere between the closed and open
system. In port environment there are many actors
and the areas can be large, and therefore it is difficult
to have completely closed system. On the other hand
the open system requires good on-board sensors to
detect objects before collision.
2.2 Identification of New Autonomy
Related Uncertainties and Safety
Risks
Autonomous machinery systems are emerging and
they are essential for enabling new automated
material handling and autonomous transportation in
sea ports and other terminals. Autonomous
technologies will be a huge step towards safer and
more efficient terminal operations, but the software
solutions and advanced control systems in various
system levels also involve complexities that pose
challenges to identification and control of new
functional failures, safety issues, and security
concerns (Ramos et al. 2019).
Autonomous container handling system
represent one specific domain of autonomous and
cooperating systems and they can also be thought of
as Systems of Systems (SoS) in nature (Čaušević
(2017). Autonomous container handling system can
be connected to public or semi-public communication
networks in the port area, they typically involve
multiple stakeholders, have dynamic system
reconfigurations, and they are operated in an
unpredictable operating environment
Čaušević (2017) also expressed that a common
challenge concerning all autonomous systems refers
to safety, reliability and security goals. Reliable
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
530

autonomous system executes an action each time
perfectly right but, in conjunction with unexpected
external circumstances, such a reliable action can lead
to an accident.
According to Baudin et al. (2007) hazards
related to the operation of autonomous machinery can
be separated into endogenous and exogenous hazards.
Endogenous hazards are caused by faults introduced
in the machine itself, such as design failures or
component failures. Exogenous hazards are
operational hazards including faults due to external
interference, operators’ unsafe actions or unforeseen
events in the operating environment.
One of the complexities that, in general,
characterize autonomous systems is the strong
interaction among its different components. The
component here mean equipment, software, computer
hardware and the human operator or supervisor, when
applicable. Software malfunctioning, and cyber
threats are different types of risks compared with
risks caused by hardware failures and human errors.
Past failures do not indicate future behaviour which
means that calculation of the expected likelihood or
frequency is not feasible. (Ramos et al. 2019)
In general, it can be said that autonomous
machinery can introduce hazardous situations not
normally encountered on conventional manned
worksites (ISO 17757:2017).
According to Ramos et al. (2019) the complex
human-technology interaction is one of the main
challenges for safety risk assessment of autonomous
systems. Most current quantitative assessment
methods used in conventional risk and safety
assessments rely on the separation principle. System
components are assumed to be independent of each
other and are often analyzed separately. Ramos et al.
(2019) emphasize that the interaction among
components and emerging complexity is often
neglected or reduced to a minimum. This makes it
possible to use proven methods; however, complex
systems may be abstracted and not sufficiently
represented.
Risk identification and assessment in unique
autonomous container handling applications should
be understood as a top-down process wherein upper
work site level assessment results represent input and
requirements for the next level, ensuring that the
system-safety requirements and risk-reduction
solutions are based on the actual site specific factors
involved. The risk estimation methods and risk-
evaluation practices need to be appropriate for the
specific needs of risk assessment activities at the
various levels of systems engineering and in the
individual phases in the system life cycle. (Tiusanen,
2014)
Some qualitative systemic methods like STPA
(System Theoretic Process Analysis) (Leveson, 2012)
or FRAM (Functional Resonance Analysis Method)
(Hollnagel, 2012) include the different system
elements and system interactions, and assess also the
emerging properties of the system elements.
According to Ramos et al. (2019) these methods,
while providing useful qualitative analysis, are still
very limited in unravelling complex failure modes
and mechanisms in addition to being qualitative and
of limited value in prioritizing risks and risk reducing
measures.
2.3 Technology Development
Challenges
2.3.1 Challenges in Sensor Technology
Availability
Sensors are developing continuously, but for safety
purposes there seems to be limits. During 2019, the
first two safety sensors capable of operating in
outdoor environment, came to the European market.
One of these is a laser scanner (SICK outdoorScan3)
and the other is a radar (Inxpect LBK System). The
laser scanner is accurate, but it is still sensitive to dust,
moisture and rain. The radar, on the other hand, is not
so sensitive to the environmental conditions, but the
detection angle is not so accurate.
In heavy rain, snow or fog the sensors are not
applicable, but on the other hand, the port operations
would be difficult or dangerous also for manual
operators in such conditions. The safe detection range
for the sensors is currently about 4 m, but it may
increase in the next few years up to 7 m. The indoors
safety sensors have often a detection range of 9 m.
The laser scanners for outdoors use differ from
indoors laser scanners in the capability to emit a lot
of beams. The idea is that, by having a lot of beams,
some beams could navigate between raindrops and
detect a distant object. The outdoors sensors need to
differentiate objects and raindrops and, in general,
bad weather or operating conditions.
In addition to challenges with detection range,
there are specific cases that are difficult for on-board
sensors. Sensors cannot see behind corners or objects.
Also objects beside a container or objects with
dimensions at high (e.g. reach stacker) or low heights
can be very difficult to detect. Thus, there are
challenges to detect objects in the port environment
in all conditions.
Instead of on-board sensors, it is also possible to
apply a central tracking system, which knows the
positions of all moving objects within a specified
Safety and Dependability of Autonomous Systems in Container Terminals: Challenges and Research Directions
531

area. This requires tagging of objects and the
uncertainty of position correctness needs to be
handled with a safety system. This kind of approach
seems promising from safety point of view, but it
lacks some properties related to freedom.
2.3.2 Challenges of Increasing Software
Intensity
Autonomous systems differ from traditional
machinery systems especially in terms of the amount
of software used. Sophisticated software is needed to
interpret the vast amounts of sensor data collected and
to make decisions based on the situational awareness
created. Additional software elements are also
required e.g. for communications and functions
related to remote monitoring and operation.
As software complexity increases, the amount of
software errors typically increases as well. In
complex software, errors are always present, which
requires that sufficient error handling measures are in
place. A majority of software errors can be traced
back to the requirements specification phase. (Malm
et al., 2011)
To develop high-quality software, concept design
phase and systematic requirements management
during it play a central role. Focus should be placed
on identification of the critical areas of the software
as early as possible to prevent costly fixes later in the
product development process. It should also be noted
that cybersecurity shall be considered as an integral
part of the development process when designing
autonomous machine systems (Pentikäinen, et al.,
2019).
For software, the assessment of safety, reliability
and security aspects is more difficult to establish.
Reliability of software is approximated by such
measures as the remaining amount of errors in the
software, which does not clarify how the software
may fail. In the context of large automation systems
the interaction of different software modules and
components, from different suppliers, is challenging.
(Ramos et al. 2019)
As a relatively new type of software element,
autonomous systems usually employ various machine
learning based artificial intelligence (AI) elements,
for example in recognizing objects from sensor data,
as well as in various condition monitoring and
optimization tasks. From the dependability point of
view, such systems may be highly effective: they can
improve predictability of machine performance and
can be used to optimize operational parameters and
maintenance tasks. On the other hand, these
technologies are fairly new and lack a background of
demonstrated use in industrial environments. Thus,
the importance of data quality and procedures for
design and verification of AI systems becomes
increasingly important also from the safety and
dependability point of view. Additionally, the
systems may lack the transparency that is needed to
assure that the system operates correctly in all
plausible operational scenarios. (Heikkilä & Välisalo,
2018)
Increasing software intensity can be seen as a
broad systems engineering issue. In the context of
port equipment, safety is one of the main issues to be
considered. From the perspective of safety analyses,
the increasing software intensity calls for means to
describe the system in a way that support in managing
the complexity. In all cases, thorough hazard
identification needs to take place. As a new approach
in hazard identification, systems-theoretic methods
have been proposed to facilitate hazard analysis of
complex systems. Their use in the context of port
automation, however, is largely unexplored.
3 CONCLUSIONS AND
RESEARCH DIRECTIONS FOR
AUTONOMOUS CONTAINER
HANDLING SYSTEMS
Autonomous port logistics face several challenges.
Currently, single technical solutions for autonomous
machine fleet safety systems in port environment
seem to be challenging. Apparently, several means
are need to implement a safe autonomous system. In
all cases, a thorough risk assessment is needed, where
the specific conditions of the automated fleet solution
are taken into consideration.
In the AUTOPORT project, research is
conducted to solve some of the challenges that have
been identified and were described in this paper.
Based on the initial findings, key research directions
that support the development of safe and reliable
autonomous port logistics can be identified:
▪ Development of reliability, availability,
maintainability and safety (RAMS) related
design procedures so that the effects of
autonomy can be addressed. This includes
specification of data models for a database-
centric approach to support RAMS
management.
▪ There is clearly a need for a joint functional
safety, reliability and security approaches
for risk assessment. A holistic approach is
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
532

required for the assessment of safety,
reliability and security risks of autonomous
logistic systems. Special focus should be put
on considering the interactions between
subsystem and their potential outcomes and
implications. Knowledge on Cyber Physical
Systems (CPS) and Systems of Systems
(SoS) theories is important in handling the
system complexity.
▪ Application of systems-theoretic approaches
to support safety assessments of new
autonomous technologies. This will support
especially the identification of software-
based safety issues and issues in challenging
mixed traffic situations.
▪ Application of relevant standards from other
domains to account for the lack of domain-
specific standardization for port machinery.
The challenges presented in this paper cover only a
part of the larger number of socio-technical and
economic challenges that need to be solved to enable
increasing automation in small and mid-size
terminals. In addition to the mostly technical safety
and dependability aspects presented in this paper, the
entire business case and various operational and asset
management strategies need to be considered to form
a comprehensive understanding of the effects of
autonomy. Solving these challenges could lead to
major advances in container logistics, increasing
efficiency and safety within the terminal, but also
helping in optimization of the entire logistics chain.
ACKNOWLEDGEMENTS
The work presented in this paper is part of the
AUTOPORT project funded by Business Finland
under the Smart Mobility programme.
REFERENCES
AUTOPORT, 2020. Project website. Available:
https://autoport.fi/
Baudin, É, Blanquart, J., Guiochet, J. & Powell, D. 2007.
Independent Safety Systems for Autonomy: State of the
Art and Future Directions, LAAS-CNRS.
Brinkmann B., 2011. Operations Systems of Container
Terminals: A Compendious Overview. In: Böse J. (ed)
Handbook of Terminal Planning. Operations
Research/Computer Science Interfaces Series, vol 49.
Springer.
Čaušević, A. 2017. A risk and threat assessment approaches
overview in autonomous systems of systems. 2017
XXVI International Conference on Information,
Communication and Automation Technologies (ICAT),
Sarajevo, 2017, pp. 1-6.
Fiedler, R., et al., 2019. Autonomous vehicles' impact on
port infrastructure requirements. Fraunhofer Center for
Maritime Logistics and Services CML.
Hämäläinen, J., Yli-Paunu, P. & Peussa, P., 2018.
Automated container terminals and self-driving cars:
Industry outlook. Cargotec Kalmar white paper.
Available:
https://www.kalmarglobal.com/48eaed/globalassets/m
edia/215590/215590_White-paper-Autonomous-cars-
web.pdf
Heath, T., 2018. Autonomous Industrial Machines and the
Effect of Autonomy on Machine Safety. M.Sc Thesis.
Tampere University of Technology.
Heikkilä, E., & Välisalo, T. (2018). A methodological
framework to support the design of safe and secure
autonomous systems. In 9th International Conference
on Safety of Industrial Automated Systems, SIAS 2018:
Proceedings, pp. 110-115. inrs.
Hollnagel, E., 2012. FRAM: The functional resonance
analysis method: Modelling complex socio-technical
systems. Ashgate Publishing Ltd.
ISO 17757:2017. Earth-moving machinery and mining —
Autonomous and semiautonomous machine system
safety. 44 p.
Leveson, N. (2012). Engineering a safer world: Systems
thinking applied to safety. MIT Press.
Malm, T., Vuori, M., Rauhamäki, J., et al., 2011. Safety-
critical software in machinery applications. VTT
Technical Research Centre of Finland. VTT Research
Notes, No. 2601.
PEMA, 2016. Container Terminal Automation.
PEMA information paper. Available:
https://www.pema.org/wp-
content/uploads/downloads/2016/06/PEMA-IP12-
Container-Terminal-Automation.pdf
Pendleton, S., et al. 2017. Perception, Planning, Control,
and Coordination for Autonomous Vehicles. Machines.
5(1), 6.
Pentikäinen, H., Malm, T., & Heikkilä, E., 2019.
Cybersecurity in Autonomous Machine Systems
Development. VTT Technical Research Centre of
Finland. VTT Research Report, No. VTT-R-01087-19
Ramos, M.A., Thieme, C., Utne, I.B. & ; Mosleh, A.
Autonomous Systems Safety – State of the Art and
Challenges. In the Proceedings of the First International
Workshop on Autonomous Systems Safety (IWASS).
11-13 March, 2019, Trondheim Norway. Norwegian
University of Science and Technology (NTNU)
Trondheim, Norway ISBN: 978-82-691120-2-3
SAE-J3016, 2018. Taxonomy and Definitions for Terms
Related to Driving Automation systems for On-Road
Motor Vehicles. SAE International.
Tiusanen, R., Heikkilä, E., Malm, T., & Ronkainen, A.,
2019a. System safety engineering approach and
concepts for autonomous work-machine applications.
In 2019 World Congress: Resilience, Reliability and
Safety and Dependability of Autonomous Systems in Container Terminals: Challenges and Research Directions
533

Asset Management: Conference proceedings (pp. 144-
147). Future Resilient Systems (FRS).
Tiusanen, R., Malm, T. & Ronkainen, A., 2019b. An
overview of current safety requirements for
autonomous machines – review of standards.
Automaatiopäivät23 extended abstracts. Available:
https://www.automaatioseura.fi/site/assets/files/1896/2
3_au-23_paper_23ea.pdf
Tiusanen, R., 2014. An approach for the assessment of
safety risks in automated mobile work-machine
systems. Dissertation. VTT Technical Research Centre
of Finland.
Tähtinen, O., 2018. Safety Requirements of Remote
Operating Station for Container Handling Equipment.
Bachelor’s thesis. Tampere University of Applied
Sciences.
Vuorimaa V, 2019. Readiness Assessment of Engineering
Practices for Designing Autonomous Industrial Mobile
Machinery. M.Sc. (Tech.) thesis. Tampere University.
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
534
