
Adaptive Fog Service Placement for Real-time Topology Changes in
Kubernetes Clusters
Tom Goethals
a
, Bruno Volckaert
b
and Filip de Turck
c
Department of Information Technology, Ghent University - imec, IDLab, Technologiepark-Zwijnaarde 126,
9052 Gent, Belgium
Keywords:
Fog Computing, Fog Networks, Edge Networks, Service Mesh, Service Scheduling, Edge Computing.
Abstract:
Recent trends have caused a shift from services deployed solely in monolithic data centers in the cloud to
services deployed in the fog (e.g. roadside units for smart highways, support services for IoT devices). Si-
multaneously, the variety and number of IoT devices has grown rapidly, along with their reliance on cloud
services. Additionally, many of these devices are now themselves capable of running containers, allowing
them to execute some services previously deployed in the fog. The combination of IoT devices and fog
computing has many advantages in terms of efficiency and user experience, but the scale, volatile topology
and heterogeneous network conditions of the fog and the edge also present problems for service deployment
scheduling. Cloud service scheduling often takes a wide array of parameters into account to calculate optimal
solutions. However, the algorithms used are not generally capable of handling the scale and volatility of the
fog. This paper presents a scheduling algorithm, named “Swirly”, for large scale fog and edge networks,
which is capable of adapting to changes in network conditions and connected devices. The algorithm details
are presented and implemented as a service using the Kubernetes API. This implementation is validated and
benchmarked, showing that a single threaded Swirly service is easily capable of managing service meshes for
at least 300.000 devices in soft real-time.
1 INTRODUCTION
Recent years have seen the rise of technologies such
as containers, and more recently unikernels (Mad-
havapeddy et al., 2013), triggering a move from
purely cloud-centered service deployments to fog
computing and edge computing (Bonomi et al., 2012),
in which services are deployed close to their con-
sumers instead of in monolithic data centers.
Simultaneously, the number of devices in the edge
dependent on cloud services, sometimes capable of
running containers themselves, has grown rapidly.
Between several initiatives for smart cities (Latre
et al., 2016; Spicer et al., 2019) and an ever increas-
ing variety of IoT devices, this ensures a continuing
growth of cloud-connected devices. Fig. 1 shows the
relation of the edge to the fog and the cloud, and the
large amount and variety of devices within it.
The combination of IoT and fog computing pro-
vides a wide range of improvements, for example in
a
https://orcid.org/0000-0002-1332-2290
b
https://orcid.org/0000-0003-0575-5894
c
https://orcid.org/0000-0003-4824-1199
Figure 1: The conceptual difference between the cloud, the
fog and the edge. The cloud is centralized and consists of
few data centers, while the edge is everywhere, containing
a large amount and variety of devices.
efficiency and user experience. However, scheduling
services in the fog requires a different approach than
scheduling in the cloud.
The main difference is that instead of being lo-
cated in centralized data centers, the fog and edge
are spread homogeneously over a large physical area,
possibly containing hundreds of thousands of devices.
Network grade and quality can vary by orders of mag-
Goethals, T., Volckaert, B. and de Turck, F.
Adaptive Fog Service Placement for Real-time Topology Changes in Kubernetes Clusters.
DOI: 10.5220/0009517401610170
In Proceedings of the 10th International Conference on Cloud Computing and Services Science (CLOSER 2020), pages 161-170
ISBN: 978-989-758-424-4
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
161

nitude over the entire fog, while latencies are much
higher than in the cloud itself.
These properties result in a larger variety of net-
work conditions and problems. Any scheduling so-
lution should be able to work around broken lines of
communication and changing network conditions.
Because of its decentralized nature, it is harder to
scale services in the fog than in the cloud. It is not
always possible or useful to scale services in place
when demand from edge devices spikes, and deploy-
ing services closer to end users is more complex be-
cause of the size of the fog. Additionally, the topology
of the fog and edge are constantly in flux, requiring
real-time service migrations and scaling.
On the other hand, there are some challenges that
remain mostly unchanged from cloud deployments.
Node resource limitations need to be taken into ac-
count by the service scheduler, whether those are
hardware resources or calculated metrics. Further-
more, because underloaded nodes have a relatively
high resource overhead (e.g. operating system, idle
services), the solution should strive for a minimal
number of fog service deployments while placing
them in optimal locations. This approach will attempt
to minimize both total resource use, and access times
for consumers in the edge. Finally, thresholds can be
defined on certain metrics in order to guarantee cer-
tain levels of responsiveness or free resources.
To summarize, a performant fog service scheduler
should:
• Req. 1 work on the scale of hundreds of thousands
of edge devices
• Req. 2 be able to handle changing network condi-
tions and topologies
• Req. 3 take fog node resource limits and distance
metrics between nodes into account
• Req. 4 minimize the number of instances required
for any fog service deployment
This article proposes Swirly, and its implementa-
tion for use with Kubernetes, to meet these require-
ments. Swirly is a scheduler that runs in the cloud or
fog, which plans fog service deployments with a min-
imal number of service instances. It does so while
optimizing the distance to edge consumers according
to a chosen measurable metric. Furthermore, it can
incorporate changes to the network and topology in
real-time.
Section 2 presents existing research related to op-
timizing service deployments. Section 3 explains how
the proposed algorithm works, while section 4 ex-
plains how it is implemented in Kubernetes. In sec-
tion 5, an evaluation setup and methodology are pre-
sented to verify the performance of Swirly. The re-
sults of the evaluations are presented and discussed in
section 6, with suggestions for future work in section
7. Finally, the conclusions are presented in section 8.
2 RELATED WORK
Shifting workloads between the cloud and edge hard-
ware has been extensively researched, with studies on
edge offloading (Mach and Becvar, 2017), cloud of-
floading (Kumar and Lu, 2010), and osmotic comput-
ing (Villari et al., 2016).
Many strategies exist for fog container deploy-
ment scheduling, ranging from simple but effective
resource requests and grants (Santoro et al., 2017), to
using deep learning for allocation and real-time ad-
justments (Morshed et al., 2017).
Initial research into fog computing and service
scheduling dates from before the concept of the fog,
for example Oppenheimer et al. (Oppenheimer et al.,
2005), who studied migrating services in federated
networks over large physical areas. This work takes
into account available resources, network conditions,
and the cost of migrating services between locations
in terms of resources and latency.
Zhang et al. (Zhang et al., 2012) present an
algorithm for service placement in geographically
distributed clouds. Rather than focusing on re-
sources as such, their algorithm makes placement de-
cisions based on changing resource pricing of cloud
providers.
Aazam et al. provide a solution for fog data cen-
ter resource allocation based on customer type, ser-
vice properties and pricing (Aazam and Huh, 2015a),
which is also extended to a complete framework for
fog resource management (Aazam and Huh, 2015b).
In more recent research, Santos et al. (Santos
et al., 2019) present a Kubernetes-oriented approach
for container deployments in the fog in the context
of Smart Cities. Their solution is implemented as an
extension to the Kubernetes scheduler and takes net-
work properties of the fog into account.
Artificial intelligence is also making headway into
fog scheduling research. For example, Canali et al.
(Canali and Lancellotti, 2019) tackle fog data prepro-
cessing with a solution based on genetic algorithms.
Their solution distributes data sources in the fog,
while minimizing communication latency and consid-
ering fog node resources.
Zaker et al. (Farzin Zaker and Shtern, 2019) pro-
pose a distributed look ahead mechanism for cloud
resource planning. Rather than provisioning more
resources to counter network load, they attempt to
optimize bandwidth use through the configuration of
CLOSER 2020 - 10th International Conference on Cloud Computing and Services Science
162

overlay networks. The predictive look ahead part is
implemented by using the IBK2 algorithm.
Finally, Bourhim et al. (El Houssine Bourhim and
Dieye, 2019) propose a method of fog deployment
planning that takes into account inter-container com-
munication. Their goal is to optimize communication
latencies between fog-deployed containers, which is
obtained through a genetic algorithm.
In summary, recent research focuses on artificial
intelligence to find near-optimal solutions for a given
network topology, and an implementation of such
an algorithm in the Kubernetes scheduler has been
shown to work. However, genetic algorithms are unfit
to quickly react to constant changes in large network
topologies. Moreover, the Kubernetes implementa-
tion in this paper is designed so it can be run any-
where, not only on a Kubernetes master node.
3 ALGORITHM
This section explains the concepts on which Swirly is
built, and its operations. Swirly is designed around
the assumption that some fog services are used by
most, if not all, edge devices. This allows for a simple
and flexible approach to building large service topolo-
gies. Examples of this can be found in IoT, where ev-
ery device (e.g. smart bulb, climate control) connects
to the same cloud service (e.g. device registration,
status information, control webhooks).
For the rest of this paper, a network with fog and
edge devices with frequent changes to its topology
will be referred to as a swirl. The algorithm, which
is designed to build optimal service topologies in a
swirl, is named Swirly after this concept. There are
two types of nodes widely used throughout the paper.
Edge nodes are devices at the network edge, which act
as consumers of fog services. Fog nodes, which are
located in the fog, provide services for edge nodes as
determined by Swirly. While a service topology refers
to the output of the algorithm, in which fog nodes are
assigned to provide services for each edge node, the
physical layout of the swirl is referred to as the node
topology.
Fig. 2 illustrates how Swirly builds a service
topology from a small collection of edge nodes and
fog nodes. In the first step (Fig. 2a), all fog nodes
are idle and six edge nodes are in need of service
providers. Assuming a maximum distance of 100
units between edge nodes and fog nodes, Fig. 2b
shows that the algorithm determines that two fog
nodes should be activated to accommodate all edge
nodes. Most of the edge nodes are serviced by the
fog node closest to them, but for the edge nodes clos-
est to the inactive fog node, the numbers show that
they can be sufficiently serviced by a non-optimal fog
node. However, these fog nodes do not have infinite
capacity, and at some point the third fog node will be
activated as in Fig. 2c.
Fig. 3 shows the result of Swirly on a large scale.
Edge nodes have been colored according to the fog
node which acts as their service provider, while fog
nodes themselves are shown as red dots (inactive) or
green dots (active).
When Swirly is started, it has a collection of fog
nodes and their available resources. No further infor-
mation is needed, apart from an IP address or another
effective method of reaching them.
3.1 Adding Edge Nodes
When adding an edge node, the algorithm first exam-
ines the closest active fog node to the edge node. If
that fog node has any spare capacity, it is assigned
as service provider for that edge node. However, if
there is no active fog node yet, or there is no fog node
with spare capacity, or all active fog nodes are be-
yond the maximum distance, then the fog node closest
to the edge node is activated and assigned as service
provider for the edge node. In the case that even the
closest fog node is more than the maximum distance
away from the edge node, it is still assigned as ser-
vice provider. Using this simple approach, Req. 3 and
Req. 4 are satisfied because new service instances are
deployed only if there is no other fog node acceptably
close or available.
3.2 Edge Node Updates
To fulfill Req. 2, Swirly must support changing
topologies, so edge nodes will have to periodically
report their metric distances to fog nodes to Swirly.
Some suggestions for distance metrics are discussed
in subsection 3.5. If Swirly receives an update from
an unknown edge node, it will add it as discussed in
the previous subsection. For other updates, update
and remove operations are required. For all opera-
tions, it is important to note that the distances reported
by edge nodes are pre-sorted by increasing distance,
so the closest fog node is found in constant time.
The remove operation starts by unassigning an
edge node from its fog node and removing it from the
swirl. It then checks if the fog node is underutilized.
If so, it attempts to evacuate all remaining edge nodes
serviced by that fog node to other nearby fog nodes.
This process will fail if any edge node is assigned to
a fog node beyond the maximum distance, in which
case the evacuation is reverted. If successful, the orig-
Adaptive Fog Service Placement for Real-time Topology Changes in Kubernetes Clusters
163
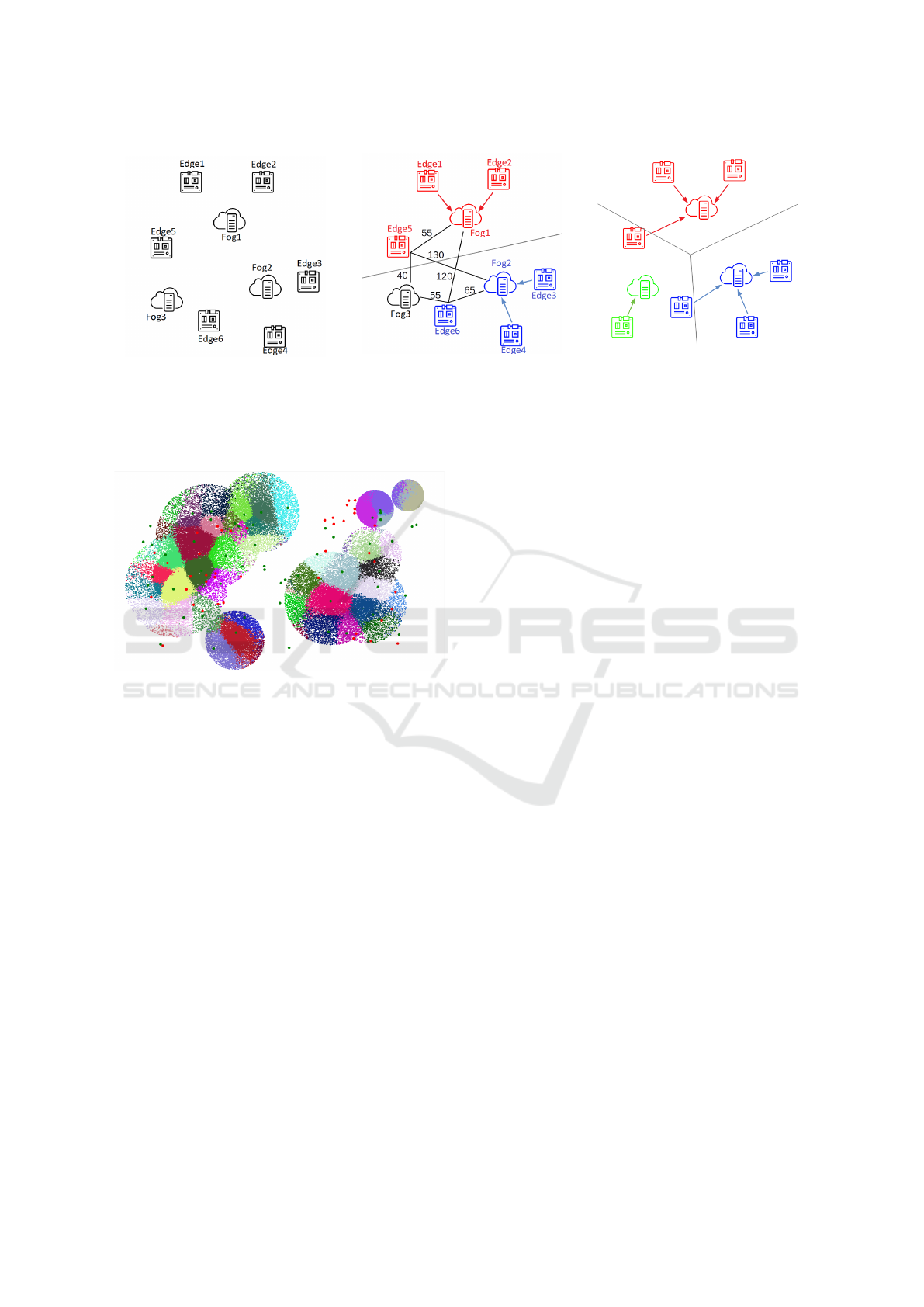
(a) Uninitialized service topology.
(b) All edge nodes assigned to service providing fog
nodes. Numbers represent ping times from specific
edge nodes to fog nodes.
(c) An additional fog node is activated because of
resource limitations.
Figure 2: Different stages of building a service topology with Swirly, assuming a maximum distance of 100 to service
providers.
Figure 3: Visualization of a service topology generated by
Swirly. Big red dots are inactive fog nodes, big green dots
are active fog nodes servicing nearby edge nodes.
inal fog node is removed from the service topology.
While this process may increase overall distance be-
tween fog nodes and edge nodes, it is assumed that
any distance below the maximum distance is equally
acceptable.
The evacuation process ensures that remove oper-
ations produce the same service topologies as if the
exact subset of edge nodes that absolutely require
a specific fog node had never been in the topology,
keeping it consistent with the add operation. Because
the minimum and maximum resource limits are con-
figurable, this allows Swirly to optimize the number
of active fog nodes, and thus minimize total resources,
while keeping it from overloading any single node.
The update operation updates the fog node dis-
tances for a specific fog node. Should the distance
from an edge node to its current service provider sud-
denly increase beyond the maximum distance, the al-
gorithm will remove it from the service topology and
add it again in an attempt to assign a closer fog node.
Note that a good distance metric combined with
swirl updates not only enables Swirly to act on topo-
logical changes, but also to avoid or partially evacuate
fog nodes experiencing load spikes and network prob-
lems.
3.3 Fog Node Updates
Fog nodes should also send Swirly periodic updates
containing their free resources, but this only changes
their availability for further edge node assignments.
Reassigning edge nodes to another service provider
when resources on a fog node run out is not currently
implemented. While periodic resource updates enable
Swirly to detect new fog nodes in the swirl, fog node
dropout is not automatically detected and the remove
operation for fog nodes has to be explicitly called.
This could be further extended with a heartbeat mech-
anism or by having fog nodes themselves call the re-
move operation.
3.4 Request Redirection
Redirecting service requests from edge nodes to the
correct service providers is outside the scope of this
paper. However, because the entire service topology
is known to Swirly, it should not be overly difficult to
propagate changes to a (distributed) DNS system, or
any other facility that handles request redirection.
3.5 Distance Metric
Swirly is not meant to directly tackle QoS and load
balancing issues. Instead, it relies on a generic metric
which indicates the ability of a fog node to support
service requests from a specific edge node. A good
CLOSER 2020 - 10th International Conference on Cloud Computing and Services Science
164

metric can improve the efficiency of Swirly and its re-
sponsiveness to changes by incorporating various fac-
tors that indicate network and node performance, but
this must be balanced against computational and net-
working overhead. This section discusses some sim-
ple metrics that can be used to evaluate Swirly.
Calculating distances between nodes using geo-
metric coordinates is reliable, accurate and generally
requires little processing time. Additionally, geo-
graphical coordinates can track moving objects effec-
tively and the distances can be calculated by Swirly
itself, with a minimal network overhead for coordi-
nate updates. However, this metric does not allow for
any significant changes based on node or network sta-
tus.
Using ping times has some notable advantages in
that they implicitly contain an indication of network
quality and physical distance. The value of this met-
ric can be measured by using the ping command, al-
though it is often blocked by routers and firewalls.
Additionally, the overhead associated with this metric
increases linearly with both the number edge nodes
and fog nodes.
Because ping is a useful metric, these issues can
be fixed by using a very lightweight web service on
both edge nodes and fog nodes to determine the la-
tency between software service endpoints. The disad-
vantages of this approach are that the packet sizes are
larger than those of a simple ping, and that it requires
slightly more processing time. However, it is unlikely
to be blocked.
For the implementation in this paper, the last ap-
proach will be used. Every edge node will periodi-
cally determine its distance to each known fog node.
The rest of this subsection aims to show that this does
not result in an unacceptably high network overhead.
• The example assumes 200000 edge nodes, using
200 fog nodes as service providers
• Each edge node will attempt to determine its dis-
tance to fog nodes once every minute
• The size of a ping packet is 56 bytes on Unix
• wget shows that a suitable web service request is
159 bytes and a response is 202 bytes
Using these numbers, each fog node has to process
about 3333 requests per second for a total of 4Mbps
incoming and 5Mbps outgoing.
To avoid overloading nodes that are under heavy
load and frequent pinging of distant nodes, the fre-
quency can be reduced by an order of magnitude for
fog nodes more than two times the maximum distance
away. For large networks, this should reduce total
traffic considerably. However, no concrete numbers
for this can be determined since they are fully depen-
dent on the network topology.
Using P as the measuring period in seconds and S
as the message size in bytes (15 for IP address + 4 for
an integer number), equation 1 gives an overhead of
98Mbps for the server hosting Swirly, which is signif-
icant but not insurmountable.
T = 8S ·
|E|·|F|
P
(1)
To reduce this overhead, a configuration option
is included that keeps edge nodes from reporting fog
node distances unless they have changed significantly
or cross the maximum distance. For geographically
widespread swirls, this measure is likely to reduce
traffic by an order of magnitude, but concrete num-
bers can not be determined since they depend on the
specific node topology of the swirl. Section 7 dis-
cusses further options to reduce network overhead.
Finally, it can be argued that this approach is ac-
ceptably resilient. The main risk is that the webser-
vice for the ping mechanism stops working, but be-
cause of its simplicity this is very unlikely to hap-
pen unless the node it is running on goes down. As
mentioned before, the ping frequency can be reduced
for distant nodes to avoid flooding the network. Sim-
ple timeouts can be used to detect unavailable nodes,
whether because they are offline, unreachable or over-
loaded.
3.6 Performance
Table 1 shows the computational complexity of the
operations discussed in this section. In the case of
the remove operation, most of its complexity comes
from its reliance on the add operation. Similarly, the
complexity of the update operation is a result of its use
of the remove and add operations. However, the most
common cases for all operations are O(1), as will be
shown in section 6.
The memory requirements of Swirly are easier to
model. Because it has a list of edge nodes, each of
which has a list of fog nodes sorted by distance, the
total memory required is O(EF).
4 KUBERNETES
IMPLEMENTATION
While section 3 described how Swirly works, this sec-
tion explains the specifics of implementing it in Ku-
bernetes. The solution consists of three services; one
in the cloud, one deployed on each fog node and one
Adaptive Fog Service Placement for Real-time Topology Changes in Kubernetes Clusters
165

deployed on each edge node. All services are config-
urable in terms of service locations, endpoint names,
thresholds and polling times.
4.1 Swirl Service
The Swirl service keeps track of the node topology
of the swirl and runs Swirly to determine a suitable
service topology at any given time. Generally, this
service will run in a pod in the cloud, but technically
it can be run on any node, including in the fog. This
service will not take any active steps to discover the
node topology of the swirl. Instead, fog and edge
nodes that call its service methods will be implic-
itly added to the swirl. To support removing nodes
from the swirl, it subscribes to the Kubernetes API
for node changes. This implementation does not as-
sume that each edge node always requires services in
the fog, because edge services could be deployed or
removed on a specific edge node at any time. To de-
termine which edge nodes require support services in
the fog, the Kubernetes API is monitored for deploy-
ments of a specific pod. Only edge nodes with such
a deployment are taken into account when generating
the service topology. Using this approach, managing
the node topology of the swirl is separated from sup-
port service monitoring and deployment. With minor
changes, this enables the implementation to generate
service topologies for multiple types of support ser-
vices while using a single node topology, thereby us-
ing a minimal amount of memory. However, for the
rest of this paper Swirly will be used to deploy a sin-
gle type of support service on fog nodes.
By using the Kubernetes API to track node
changes, the size of the swirl is subjected to the max-
imum limit of 5000 nodes (Kubernetes, 2019) in Ku-
bernetes. Using a different approach to track node
statuses and deployments would allow for swirls with
up to 5000 fog nodes and hundreds of thousands of
edge nodes. As in section 3.3, this could be achieved
by using heartbeat mechanisms and having nodes ex-
plicitly call add and remove methods.
This service exposes the following methods:
• getFogNodeIPs: called by edge nodes when they
are initialized, it returns the list of known fog node
IP addresses
• updateFogNodePings: periodically called by edge
nodes when they measure new or significantly dif-
ferent distances to fog nodes
• updateFogNodeResources: periodically called by
fog nodes to update their free resources in the
Swirly algorithm
Table 1: Summary of algorithm operation complexity. Most
common cases are marked in bold.
Best Worst
Add O(1) O(1/(1 −|E|/|F|))
Remove O(1) O(|F|/(1 −|E|/|F|))
Update O(1) O(|F|/(1 −|E|/|F|))
4.2 FogNode Service
This service runs on each fog node and is deployed as
a daemonset in Kubernetes. It periodically measures
the free and total resources of its node and reports
them to the Swirl service. It also exposes the ping
method, which is used by the EdgeNode service to
determine the distance between edge and fog nodes.
4.3 EdgeNode Service
The EdgeNode service runs on each edge node, and
for the purposes in this paper is also deployed as a
daemonset in Kubernetes. On initialization, it fetches
the known list of fog nodes from the Swirl service.
It then periodically measures its distance to all fog
nodes in the list by calling their Ping method and
sends the results to the Swirl service if required. Fi-
nally, it exposes the setFogNodes method, which al-
lows the Swirl service to update the list of fog nodes
when changed.
5 METHODOLOGY
To verify that Swirly fulfills Req. 1, its process-
ing speed and its memory requirements are evaluated.
Additionally, to show that it generates suitable service
topologies, the output service topology for a small
scale swirl is examined. In this chapter, the hardware
and setup for the evaluations are discussed.
5.1 Node Processing and Memory
For the node processing and memory requirements
evaluations, Swirly is isolated from the Kubernetes
API so its stand-alone performance can be measured.
It is run on a single server on the IDlab Virtual Wall
(imec, 2019), which has 48GiB RAM and a Xeon E5-
2650 CPU at 2.6GHz. In these evaluations, the algo-
rithm is run on swirls ranging from 50.000 to 400.000
edge nodes, in steps of 50.000, while the number of
fog nodes varies from 50 to 550 in steps of 50. In
some cases, the results will start at a higher number of
fog nodes due to resource constraints. For example,
resource limits are configured so that 300.000 edge
CLOSER 2020 - 10th International Conference on Cloud Computing and Services Science
166

nodes require 400 fog nodes. For each combination
of edge nodes and fog nodes, 20 random swirls are
generated for Swirly to process. This ensures that a
good variety of swirls is generated so the entire per-
formance range of the algorithm can be evaluated.
To generate the large scale swirls required by the
evaluations, a topology generator is added to the so-
lution which generates edge nodes and fog nodes ran-
domly within an area of 1200 by 800 units. In order to
simulate populated areas, edge nodes are generated in
circles of various sizes which can overlap and whose
density is highest in their centers. Fog nodes, on the
other hand, are generated randomly over the entire
area. Fig. 3 shows a visualization of a topology gen-
erated by a .NET implementation of Swirly equivalent
to the Kubernetes implementation.
Latency is chosen as a distance metric, and it is de-
fined so that one unit equals 1ms. However, to simu-
late the fuzziness of latency, it is randomized between
80% and 120% of its distance value. The maximum
distance between edge nodes and their service provid-
ing fog nodes is set at 100ms. Because it is possible
that edge nodes are generated which do not have a fog
node within maximum distance, the evaluation results
focus on average distance.
The implementation of Swirly and the evaluation
code are made available on Github
1
.
To measure how long it takes Swirly to add edge
nodes, the evaluations measures the time it takes to
build an entire service topology from scratch. This
number is then normalized to the time it would take to
add 10.000 edge nodes to a topology of that size. For
the delete operation, it is measured how long it takes
to delete 10.000 edge nodes from a finished service
topology. The performance of the update method is
not measured, because is entirely dependent on how
latencies fluctuate in a given swirl, which are unlikely
to be simulated realistically.
Memory consumption is read from
/proc/<pid>/statm every time Swirly finishes
building a service topology from a swirl. It is then
printed to stdout, where it is collected by a batch
script for further processing.
5.2 Generated Service Topology
To show that the Kubernetes implementation of
Swirly generates appropriate service topologies, a
small-scale swirl is manually set up on the IDlab Vir-
tual Wall with a Kubernetes master, 3 fog nodes and
1
The code will be made available upon acceptance and
once an appropriate open source license model is selected.
For review purposes code can be requested from the main
contact author.
6 worker nodes as shown in Fig. 2a. The services de-
scribed in section 4 are deployed on these nodes and
Swirly builds a service topology from the information
reported by the fog and edge nodes. For the purposes
of the test, the code is slightly modified so that the fog
node ping method sleeps for a predetermined amount
of time depending on the edge node calling it, to sim-
ulate various hardcoded distances.
6 EVALUATION
6.1 Edge Node Processing
Fig. 4 shows the time required to add 10000 edge
nodes to service topologies of various sizes. As pre-
dicted, the time required to add edge nodes increases
as the number of edge nodes increases, only to fall
again as more fog nodes are made available. Even-
tually it levels off at a constant value for each series,
which increases sublinearly with the amount of edge
nodes in the service topology.
While these results mostly agree with the com-
putation complexity in table 1, the last effect merits
some explanation. The predicted performance does
not take into account some properties of the swirl such
as edge and fog node densities. The observed effect
can be explained through edge node density. Since the
physical size of the swirl stays the same, edge node
density increases along with edge node count, and
fog nodes will eventually run out of servicing capac-
ity. When that happens, they can not service all edge
nodes within their maximum distance, so some edge
nodes need to be assigned to suboptimal fog nodes.
In worst cases some edge nodes can not be serviced
at all, although this is avoided by the conditions of the
evaluation. On the other hand, this means that perfor-
mance would likely be constant if the physical size
of the swirl expands along with the number of nodes.
To avoid the effect in areas with dense populations of
edge devices, it suffices to add more fog nodes and
lower the maximum distance slightly.
Finally, the whiskers indicate that depending on
the swirl, the time required to build a service topol-
ogy can vary from 50% to 300% of the average, but it
stabilises as the number of fog nodes increases.
The time required to remove 10.000 edge nodes
from a service topology is shown in Fig. 5. In
this case, performance is almost ideal, increasing
slowly with the number of edge nodes and decreas-
ing slightly with the number of fog nodes. The results
indicate that the worst case performance of the delete
operation is rarely triggered and does not overly affect
performance.
Adaptive Fog Service Placement for Real-time Topology Changes in Kubernetes Clusters
167

100
150
200
250
300
350
400
450 500 550
0
50
100
Fog nodes
10000 node add time (ms)
50k 100k 150k
200k 250k 300k
Figure 4: Time required to add 10000 edge nodes to service
topologies of varying sizes.
100
150
200
250
300
350
400
450 500 550
0
10
20
30
Fog nodes
10000 node remove time (ms)
50k 100k 200k 300k
Figure 5: Time required to remove 10000 edge nodes from
service topologies of varying sizes.
However, as with the add operation, the whiskers
show that performance varies significantly, from 50%
to around 200% of the average.
6.2 Memory
The memory requirements of Swirly are shown in Fig.
6. An important observation is that memory use ap-
pears to jump in distinct increments, always doubling
at the same number of fog nodes independent of edge
nodes. However, this is specific to the Golang imple-
mentation. Because Swirly keeps a sorted list of fog
node pings for each edge node, these lists all double
in size at the exact same moment, causing the jumps
in the chart. Other than the observed jumps, memory
100
150
200
250
300
350
400
450 500 550
0
2,000
4,000
6,000
Fog nodes
Process memory size (MiB)
50k 100k 150k
200k 250k
300k
Figure 6: Memory required for swirls of varying sizes.
use correlates perfectly with the predicted O(EF) re-
quirement, unaffected by the randomness of the gen-
erated swirls.
6.3 Generated Service Topology
Table 2 shows the distances between fog nodes and
edge nodes for the small-scale evaluation topology
from Fig. 2a. Swirly has two choices for using only
two out of three fog nodes for this swirl; either Fog1
and Fog2, or Fog2 and Fog3, with the first combi-
nation having slightly lower overall distances. Any
solution which activates all three fog nodes is unac-
ceptable for this node topology.
Fig. 2b shows the actual service topology gener-
ated by Swirly in Kubernetes, which is the most ef-
ficient one where Fog1 and Fog2 are activated. The
numbers in this figure indicate distances between fog
and edge nodes. These distances indicate that rather
than activating Fog3, Swirly assigns the remaining
edge nodes to already active nearby fog nodes, bal-
ancing a slight advantage in average distance against
number of service instances as per Req. 3 and Req. 4.
It is unknown if random factors could activate Fog3
rather than Fog1, but repeated iterations seem to in-
dicate not. While generating the service topology,
Swirly deploys a fog service to the correct fog nodes
through the Kubernetes API, while Fog3 was left in-
active.
CLOSER 2020 - 10th International Conference on Cloud Computing and Services Science
168

Table 2: Distances between fog nodes and edge nodes for the small-scale evaluation topology.
Edge1 Edge2 Edge3 Edge4 Edge5 Edge6
Fog1 30 50 110 130 55 120
Fog2 140 120 20 60 130 65
Fog3 95 85 120 110 40 55
7 DISCUSSION AND FUTURE
WORK
As shown in the results, the algorithm scales very
well in terms of processing time, but its memory re-
quirements can quickly grow beyond a single server.
There is no easy solution to further reduce memory
use, other than partitioning fog and edge clouds over
several machines. Despite this, the trends in the re-
sults suggest that a single Swirly service should be
able to organize fog support services for up to 300.000
edge nodes and 550 fog nodes. For contemporary
servers with 64GiB RAM, the maximum number of
nodes can be extrapolated to about 1.000.000 edge
nodes and 1.500 fog nodes. Because the algorithm
is not multi-threaded, it may be useful to run several
instances on a single machine, each of which orga-
nizes a specific region in the fog and edge. Dividing
into n regions would also alleviate memory pressure
by a factor of n, since
nO(
E
n
F
n
) =
1
n
O(EF) (2)
where the left side represents memory pressure
with n regions, which is 1/n the original requirement.
This would allow a further increase in fog and edge
nodes by
√
n each.
In section 3.5, the bandwidth requirements are
calculated of the simple distance metric used in this
paper. Despite suggested mitigating actions, the re-
quired bandwidth could grow to unsustainable levels
for extremely large swirls with millions of devices.
As with memory use, there is no easy solution to this
other than to partition the swirl by region, which may
result in worse performance at partition borders.
The current implementation of Swirly deploys ser-
vices to the fog using Kubernetes, but in order to redi-
rect service requests to the correct fog nodes, it should
interact with distributed DNS plugins deployed on the
cluster, override them, or deploy a separate system.
Additionally, the implementation currently only sup-
ports one fog service, but could easily be modified
to support any number of services to monitor and de-
ploy.
While fog node updates are fully supported in
Swirly, their impact is minimal. Fog nodes can be
added at any time and their free resources can change,
these events do not directly influence the service
topology. Rather, Swirly only takes them into account
when processing the next edge node. Ideally, the al-
gorithm should examine if any edge nodes should be
reassigned if a fog node is changed.
In terms of memory use and bandwidth require-
ments, it is better to switch to a fully distributed ap-
proach, in which the cloud algorithm is eliminated
and each edge node becomes responsible for finding
its own optimal service provider.
8 CONCLUSIONS
The introduction presents four requirements for a use-
ful large-scale fog service scheduler. It should work
with fog networks containing hundreds of thousands
of devices, while being able to handle changing net-
work topologies. It should also take node resource
limits and distance metrics between nodes into ac-
count. Finally, it must minimize the number of fog
service deployments required to service a set of edge
nodes.
Swirly is proposed as a service deployment sched-
uler, and section 3 shows how it fulfills the require-
ments by design. Several node distance metrics are
discussed, and a simple but reliable metric is chosen
for the Kubernetes implementation. To verify the Ku-
bernetes implementation of Swirly, it is evaluated in
terms of memory use and node processing speed, and
its output validated using a small, purpose-built topol-
ogy.
The results mostly adhere to the computational
complexity, but the algorithm slows down sublinearly
as the density of edge nodes increases. This leads to
the prediction that for service topologies that grow in
physical size rather than density, Swirly will require
constant processing time. When edge node density
increases, fog node density and algorithm parameters
will also need to change.
Solutions based on heuristics (e.g. genetic algo-
rithms) will likely generate better solutions, but they
are not suitable for real-time updates in large topolo-
gies, and they will require more time to generate ideal
solutions.
Adaptive Fog Service Placement for Real-time Topology Changes in Kubernetes Clusters
169

Finally, some topics for future work are discussed,
including DNS support, reducing network overhead,
better metrics and governing multiple types of ser-
vices simultaneously. However, a distributed ap-
proach is likely to solve the most important problems
concerning Swirly.
ACKNOWLEDGEMENTS
The research in this paper has been funded by Vlaio
by means of the FLEXNET research project.
REFERENCES
Aazam, M. and Huh, E.-N. (2015a). Dynamic resource
provisioning through fog micro datacenter. In 2015
IEEE International Conference on Pervasive Comput-
ing and Communication Workshops (PerCom Work-
shops). IEEE.
Aazam, M. and Huh, E.-N. (2015b). Fog computing mi-
cro datacenter based dynamic resource estimation and
pricing model for IoT. In 2015 IEEE 29th Interna-
tional Conference on Advanced Information Network-
ing and Applications. IEEE.
Bonomi, F., Milito, R., Zhu, J., and Addepalli, S. (2012).
Fog computing and its role in the internet of things. In
Proceedings of the first edition of the MCC workshop
on Mobile cloud computing - MCC ’12. ACM Press.
Canali, C. and Lancellotti, R. (2019). A fog computing ser-
vice placement for smart cities based on genetic algo-
rithms. In Proceedings of the 9th International Con-
ference on Cloud Computing and Services Science.
SCITEPRESS - Science and Technology Publications.
El Houssine Bourhim, H. E. and Dieye, M. (2019). Inter-
container communication aware containerplacement
in fog computing. In 15th International Conference
on Network and Service Management, CNSM 2019,
IFIP Open Digital Library, IEEE Xplore, ISBN: 978-
3-903176-24-9.
Farzin Zaker, M. L. and Shtern, M. (2019). Look ahead
distributed planning for application management in
cloud. In 15th International Conference on Network
and Service Management, CNSM 2019, IFIP Open
Digital Library, IEEE Xplore, ISBN: 978-3-903176-
24-9.
imec (2019). imec virtual wall:
https://www.ugent.be/ea/idlab/en/research/research-
infrastructure/virtual-wall.htm.
Kubernetes (2019). Kubernetes - building large clusters:
https://kubernetes.io/docs/setup/cluster-large/.
Kumar, K. and Lu, Y.-H. (2010). Cloud computing for mo-
bile users: Can offloading computation save energy?
Computer, 43(4):51–56.
Latre, S., Leroux, P., Coenen, T., Braem, B., Ballon, P., and
Demeester, P. (2016). City of things: An integrated
and multi-technology testbed for IoT smart city ex-
periments. In 2016 IEEE International Smart Cities
Conference (ISC2). IEEE.
Mach, P. and Becvar, Z. (2017). Mobile edge comput-
ing: A survey on architecture and computation of-
floading. IEEE Communications Surveys & Tutorials,
19(3):1628–1656.
Madhavapeddy, A., Mortier, R., Rotsos, C., Scott, D.,
Singh, B., Gazagnaire, T., Smith, S., Hand, S., and
Crowcroft, J. (2013). Unikernels. ACM SIGPLAN
Notices, 48(4):461.
Morshed, A., Jayaraman, P. P., Sellis, T., Georgakopoulos,
D., Villari, M., and Ranjan, R. (2017). Deep osmosis:
Holistic distributed deep learning in osmotic comput-
ing. IEEE Cloud Computing, 4(6):22–32.
Oppenheimer, D., Chun, B., Patterson, D., Snoeren, A. C.,
and Vahdat, A. (2005). Service placement in shared
wide-area platforms. In Proceedings of the twenti-
eth ACM symposium on Operating systems principles
- SOSP ’05. ACM Press.
Santoro, D., Zozin, D., Pizzolli, D., Pellegrini, F. D., and
Cretti, S. (2017). Foggy: A platform for workload or-
chestration in a fog computing environment. In 2017
IEEE International Conference on Cloud Computing
Technology and Science (CloudCom). IEEE.
Santos, J., Wauters, T., Volckaert, B., and Turck, F. D.
(2019). Towards network-aware resource provisioning
in kubernetes for fog computing applications. In 2019
IEEE Conference on Network Softwarization (Net-
Soft). IEEE.
Spicer, Z., Goodman, N., and Olmstead, N. (2019). The
frontier of digital opportunity: Smart city imple-
mentation in small, rural and remote communities in
canada. Urban Studies, page 004209801986366.
Villari, M., Fazio, M., Dustdar, S., Rana, O., and Ran-
jan, R. (2016). Osmotic computing: A new paradigm
for edge/cloud integration. IEEE Cloud Computing,
3(6):76–83.
Zhang, Q., Zhu, Q., Zhani, M. F., and Boutaba, R. (2012).
Dynamic service placement in geographically dis-
tributed clouds. In 2012 IEEE 32nd International
Conference on Distributed Computing Systems. IEEE.
CLOSER 2020 - 10th International Conference on Cloud Computing and Services Science
170
