Consistency Analysis of AUTOSAR Timing Requirements
Steffen Beringer
1 a
and Heike Wehrheim
2 b
1
dSPACE GmbH, Rathenaustr. 26, 33102 Paderborn, Germany
2
Department Specification and Modelling of Software Systems, Paderborn University, 33102 Paderborn, Germany
Keywords:
AUTOSAR, Consistency Analysis, Timing Analysis, Timing Constraints, Satisfiablilty Modulo Theories,
Maximum Satisfiability, Unsatisfiable Core, Timed Automata.
Abstract:
Applying formal methods in the automotive industries can significantly increase the correctness and reliability
of the developed system architectures. This in particular demands a formal specification and analysis of
requirements on systems. Automotive software architectures are, however, often described using the (semi-
formal) AUTOSAR standard which is based on various meta models as exchange formats. This complicates
a formal analysis. In this paper, we provide a formalization of timing requirements within the AUTOSAR
standard. Timing requirements specify constraints on events of the underlying software architecture. We
provide a translation of timing requirements into logical constraints which enable the usage of SMT solvers to
analyse requirements. Specifically, we employ this translation to check consistency of the requirements and
use maximum satisfiability solving for localization of erroneous requirements.
1 INTRODUCTION
For the distributed development of various automotive
software, the automotive industry utilizes the features
of the de facto standard AUTOSAR (AUTOSAR,
2019). It provides a common infrastructure for auto-
motive systems of all vehicle domains based on stan-
dardized interfaces. This also includes the definition
of component-based software architectures. It further
comprises a methodology how to facilitate and paral-
lelize the development of AUTOSAR architectures.
AUTOSAR provides methods for specifying tim-
ing requirements on the underlying software archi-
tecture by the so called AUTOSAR timing constraints
meta-model extension. Different types and flavors of
timing constraints allow for an easy use for different
parts of the software architecture in different develop-
ment phases.
Nevertheless, when the requirements get numer-
ous, maintaining an overview of them can be hard and
hence inconsistencies in the requirements can occur.
Inconsistent requirements are an indication for a mis-
understanding of the expected system functionality by
the software developer. Moreover, when requirements
are formally checked against the system architecture,
e.g. via timing verification methods as described in
a
https://orcid.org/0000-0002-8504-7435
b
https://orcid.org/0000-0002-2385-7512
(Beringer and Wehrheim, 2016) or (Richter, 2005),
inconsistent requirements lead to unnecessary verifi-
cation runs since verification is then inevitably going
to fail for some of the requirements. It is advanta-
geous to know inconsistencies in the requirements be-
forehand.
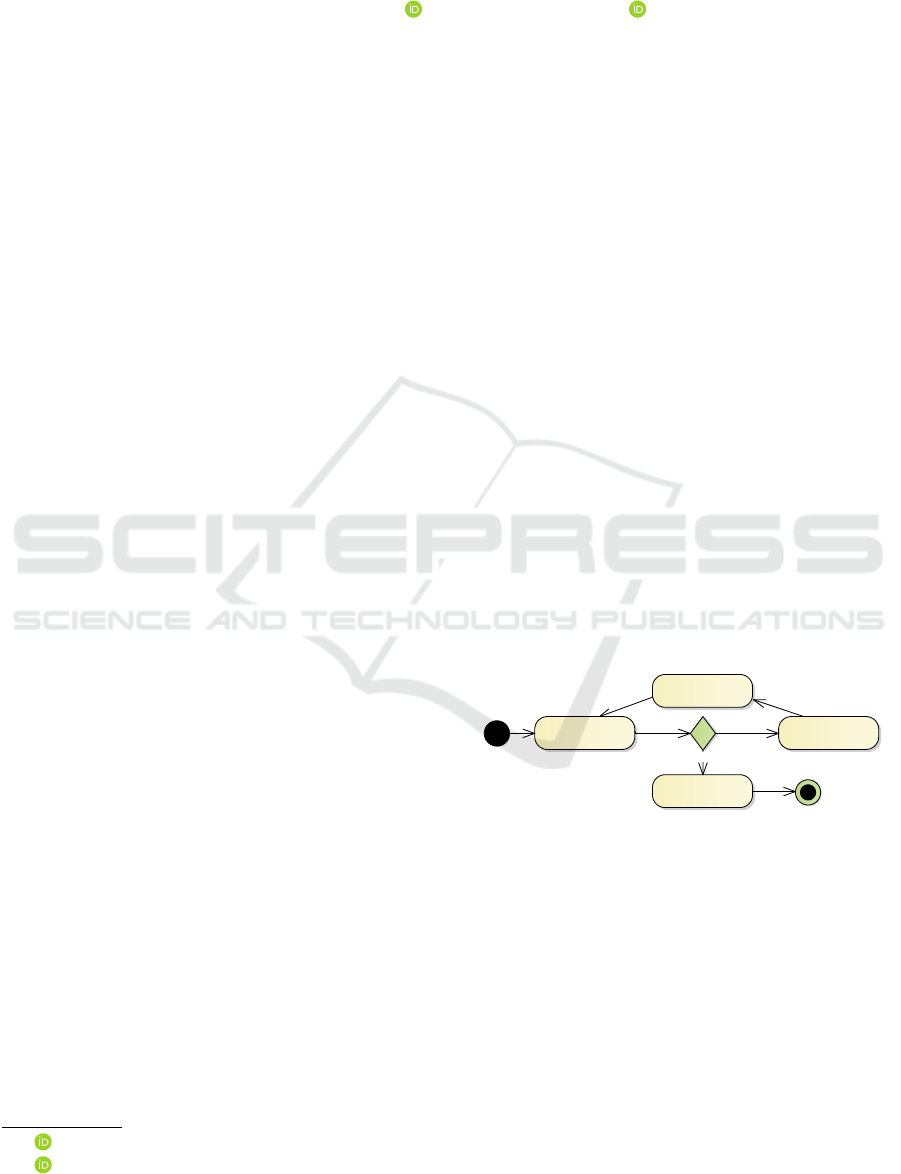
act VerificationProcessActivityDiagram
Check Consistency (R) Compute R' = MaxSMT(R)
&& R'' = unsatcore(R)
Verify (M, R)
Revise R according to R'
and R''
[R UNSAT]
[R SAT]
Figure 1: Analysis process described as UML activity dia-
gram.
This work thus presents an approach for support-
ing the early validation of AUTOSAR software ar-
chitectures by simplifying the process of AUTOSAR
timing requirements specification. It comprises an
analysis method which checks a defined set of AU-
TOSAR timing requirements for inconsistencies by
transformation of requirements models into satisfi-
able modulo theories (SMT) formulae. This enables
checking requirements before any further verifica-
tion task is triggered and assists a requirements en-
gineer in fixing the requirements set. Furthermore, it
supports the identification of possible inconsistency
Beringer, S. and Wehrheim, H.
Consistency Analysis of AUTOSAR Timing Requirements.
DOI: 10.5220/0009766600150026
In Proceedings of the 15th International Conference on Software Technologies (ICSOFT 2020), pages 15-26
ISBN: 978-989-758-443-5
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
15

causes. Whenever the set of SMT formulae is unsat-
isfiable (and hence the requirements inconsistent), we
compute the maximal subset of satisfiable formulae
(MaxSMT). These represent a set of consistent re-
quirements. All requirements which are not in this
set are potential inconsistency causes. By further-
more computing an unsatisfiable core of formulae,
we narrow down the requirements to look at for in-
consistency resolution. A visualization of both unsat
core and MaxSMT result helps the requirements en-
gineer in fixing errors. Note that we do not run the
requirements check on any transformed verification
model (e.g. timed automata when checking the re-
quirements as described in (Beringer and Wehrheim,
2016)), but directly on the AUTOSAR timing con-
straints model. This approach is advantageous, since
it decouples the concistency check from the specific
verification method.
An overview of the proposed steps and their exe-
cution sequence is shown in Figure 1 and comprises
the following five steps (for a given set of require-
ments R and given architecture model M):
1. Check the consistency of requirements R .
2. If the complete set is not consistent, compute the
greatest subset of verifiable constraints R
0
(via
a maximum satisfiability solver) and R
00
a min-
imum subset of constraints, which is inconsistent,
otherwise go to step 5.
3. Revise the requirements R based on the informa-
tion by R
0
and R
00
.
4. Repeat steps 1-3 until the requirements are con-
sistent.
5. Perform verification process on the requirements
set and the architecture model (M, R ).
All steps within the analysis process are fully au-
tomated and implemented prototypically for the
dSPACE AUTOSAR authoring tool SystemDesk
R
1
.
For step 5, we transform the given AUTOSAR archi-
tecture model into timed automata and the require-
ments into test automata and timed computational
tree logic queries (TCTL). The approach for this has
been proposed in (Beringer and Wehrheim, 2016).
Note that steps 1-4 are performed on the requirements
model only. The architecture model is used in step 5.
The paper is organized as follows. The next sec-
tion 2 introduces the domain of AUTOSAR, the con-
cept of timing requirements, and introduces a first ex-
ample model. Transformation of requirements into
SMT-formulae and our approach for identification
and correction of inconsistent requirements are shown
1
http://www.dspace.com/en/pub/home/products/sw/
\system architecture software/systemdesk.cfm
in Sections 3 and 4, respectively. Thereafter, runtime
measurement results for requirements transformation
and verification are presented in Section 5. Finally,
Section 6 discusses existing work related to our ap-
proach following a conclusion in Section 7, which
summarizes the achievements in this work and give
hints for future improvements.
2 BACKGROUND
In this chapter we introduce the foundations of AU-
TOSAR and the AUTOSAR timing extensions used to
specify timing requirements. We briefly discuss con-
sistency in general and introduce our running example
model.
2.1 AUTOSAR
AUTOSAR
2
is short for AUTomotive Open System
ARchitecture and is a joint standard developed by var-
ious automobile manufacturers, suppliers, tool ven-
dors, services- and semiconductor companies. AU-
TOSAR defines the architecture and interfaces of
software as meta-model as well as the file format for
data exchange. Furthermore, the standard defines its
own development methodology. The concepts of this
work are based on the current AUTOSAR release ver-
sion 4.3.
AUTOSAR Software Architecture. On the high-
est level AUTOSAR defines a layered software ar-
chitecture, which contains three layers (AUTOSAR,
2019). The application layer contains the controller
software and is structured as component-based archi-
tecture, which means software components can be de-
fined, which communicate via ports. Components
contain one or more so-called runnable entities (or
runnables in short) Re = {re
1
, .. . , re
n
}, which con-
tain executable software. The runtime environment
layer provides standardized APIs to connect the com-
ponents and modules on the basic software layer,
whereas the basic software layer provides modules
for basic ECU functions like the operating system and
communication services and is again subdivided into
layers (see e.g. Figure 2).
AUTOSAR Timing Extensions. A subset of the
AUTOSAR meta-model addresses the annotation of
model elements with timing properties (AUTOSAR,
2019). For a set of model elements so-called timing
events E = {e
1
. . . e
n
} can be specified. A timing event
2
http://www.autosar.org
ICSOFT 2020 - 15th International Conference on Software Technologies
16

is the abstract representation of a specific system be-
havior that can be observed at runtime, e.g. the start of
a runnable or the arrival of new data at a port. Further-
more, AUTOSAR timing extensions enable the defi-
nition of timing constraints R = {r
1
, . . . , r
n
}, which
define a timing relationship between two or more tim-
ing events. Timing constraints can be defined by re-
stricting the execution times of runnable entities. The
following timing constraints are considered:
Offset Timing Constraint. An offset timing con-
straint r
otc
= (e
s
, e
t
, min, max) constrains the time
between a source timing event e
s
∈ E and tar-
get timing event e
t
∈ E by defining a minimum
and maximum offset min,max ∈ R between those
events.
Latency Timing Constraint. A latency timing con-
straint r
ltc
= (C, min, max) describes a minimum
and maximum latency in the scope of a timing
chain C. The timing chain is an ordered sequence
of events, C = he
1
, . . . , e
n
i, e
i
∈ E for all 1 ≤ i ≤ n,
which have to occur in the specified time bound.
Synchronization Timing Constraint. A syn-
chronization timing constraint r
stc
=
(S, tolerance), S ⊆ E specifies a set of tim-
ing events, which must occur simultaneously
within a tolerance value.
Execution Order Constraint. An execution order
constraint r
eoc
= hre
i
, . . . , re
j
i constrains the ex-
ecution order of runnable entities. So for each
execution order constraint r
eoc
∈ R
eoc
with an or-
dered set of runnable entities hre
1
. . . re
n
i a suc-
cessor runnable entity re
i+1
may only be executed
after the runnable entity re
i
has been executed.
Execution Time Constraint. The execution time
constraint r
etc
= (re, min, max) does not restrict
the occurrence of timing events, but the execution
time of an executable entity re to a minimum
duration min and maximum duration max. The
runnable re can be either a runnable entity on the
application layer or a basic software module on
the basic software layer.
A software developer can define a number of such re-
quirements on a given AUTOSAR software architec-
ture. Further timing constraints like Age Timing Con-
straint are not considered since they do not add in-
consistencies in our approach, because they only ref-
erence one timing event and restrict the timing of a
variable implicitly. For modeling of AUTOSAR tim-
ing constraints we employ SystemDesk
R
.
The AUTOSAR Authoring Tool SystemDesk.
SystemDesk
R
is the tooling environment for AU-
TOSAR models of the company dSPACE. It supports
sophisticated and extensive modeling of AUTOSAR
architectures by providing a rich graphical user in-
terface as well as code generation for virtual ECUs.
Graphical model representations are available for im-
portant elements. For example, software components,
ports and connections within a software composition
can be visualized in a composition diagram. Further-
more, single software components with their ports,
interfaces and data types can be visualized in a com-
ponent diagram. Other model elements are ordered
hierarchically in a tree structure.
2.2 Consistency of Requirements
Our interest here is in checking consistency of such
timing requirements. The IEEE recommendations
for software requirements specifications (IEEE, 1998)
calls a software requirements set consistent ”if, and
only if, no subset of individual requirements de-
scribed in it conflict”. This means that the set of
requirements is consistent, if there exists a model or
system, which can satisfy all requirements in this set.
Definition 1 (Consistency). Let R = {r
1
, . . . , r
n
} be
the set of timing requirements in an AUTOSAR model
and let M be the set of models. Then R is consistent
iff ∃M ∈ M : ∀r
i
∈ R : M |= r
i
.
In the case of AUTOSAR the set of models is de-
fined by all models which can be modeled using the
AUTOSAR meta-model and the requirements are de-
fined by a set of AUTOSAR timing constraints. Thus,
the set of AUTOSAR timing constraints is only con-
sistent, if there is a AUTOSAR model which con-
forms to all restrictions imposed by the AUTOSAR
timing constraints. Since the timing constraints re-
strict the model’s behavior only in the sense of tim-
ing, the only model elements of interest are the AU-
TOSAR timing events. Therefore, checking the ex-
istence of a valid model is reduced to finding a valid
execution order of timing events.
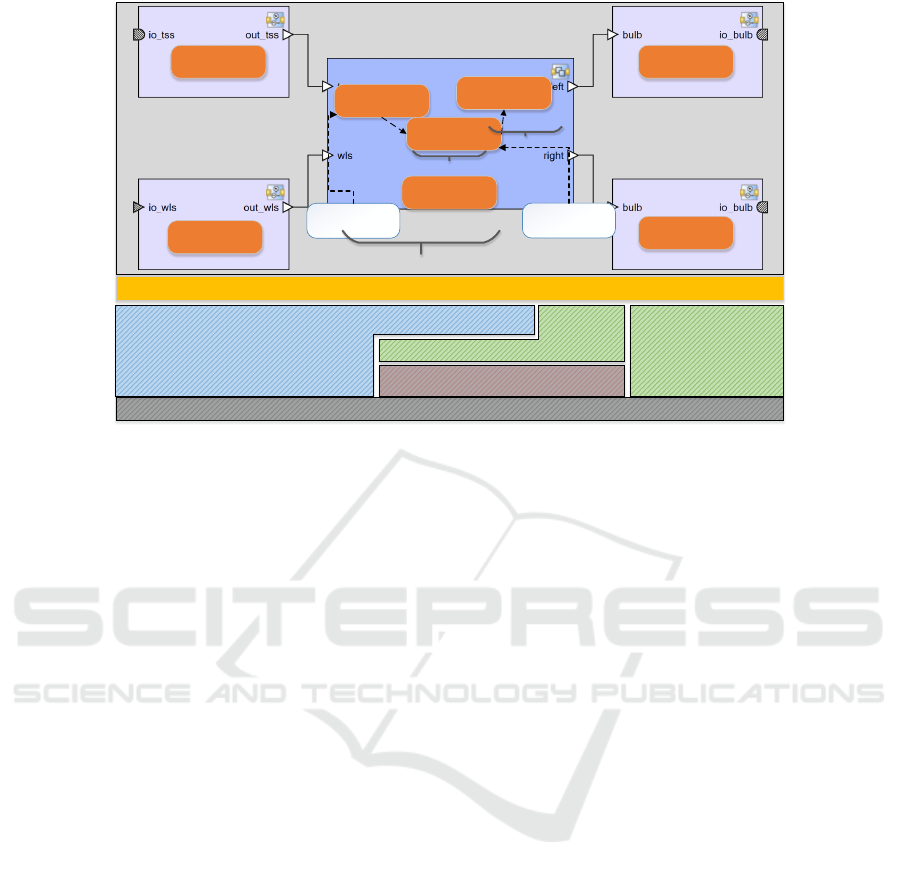
2.3 AUTOSAR Example: The Turn
Switch Indicator
In the following we will consider a simple AUTOSAR
software architecture. The architecture manages left
and right direction indicators of a vehicle according to
turn switch and warn lights sensors. The application
layer consists of several software components which
comprise several so-called runnable entities contain-
ing executable software. The example architecture is
shown in Figure 2. The two software components on
the left read in sensor data and check for errors be-
fore forwarding the signal data to the next software
Consistency Analysis of AUTOSAR Timing Requirements
17
Application layer
Runtime environment
Microcontroller
TssRunnable
WlsRunnable
TurnSwitchSensor
WarnLightsSensor
FrontLeftActuator
FrontRightActuator
TssPre-
processing
WlsPre-
processing
Logic
Toggle
IndicatorComposition
BulbRunnable
BulbRunnable
Complex Drivers
Microcontroller Abstraction Layer
ECU Abstraction Layer
Services Layer
e_s_TssPre-
processing
e_t_Logic
10|30
3|4
1|5
Figure 2: Example Software Architecture.
component. The Indicator Composition software
component receives the raw sensor values and encap-
sulates several runnable entities for pre-processing of
the signal values as well as the logic of the system.
The actuator software components on the right are
responsible for activating the left respectively right
bulb of the direction indicator. Furthermore, the ex-
ample contains a configuration of the RTE, and on
the basic software layer the configuration for the op-
erating system. Other basic software modules are
not considered in this example. Furthermore, the
example is extended with the following timing de-
scription events and timing constraints. The runnable
TssPreprocessing consists of an event for the start
e
s
TssPreprocessing
, and for runnable Logic an event for
its termination e
t
Logic
has been added. These timing
events are shown as white boxes in the example di-
agram, connected to the runnable entity they belong
to. Additionally, the architecture contains three tim-
ing constraints: An execution order constraint con-
straining the execution of runnable entities, which
is shown as dashed lines between runnables; an off-
set timing constraint constraining the time between
newly added timing events, which is reflected by the
brackets among the timing events, and an execution
time constraint constraining the execution time of the
Logic runnable (see also Table 1).
This set of constraints is not consistent. The
Logic runnable must take at least 10ms for execution
(r
etc
), while the calculation of the indicator logic shall
be completed between 3ms and 4ms after the turn
switch sensor pre-processing has been started (r
otc
).
This includes the computation of the Logic runnable,
since the runnables TssPreprocessing and Logic
must be executed in order (because of r
eoc
). Our
approach automatically identifies this kind of incon-
sistencies, while a manual inspection would be quite
complex since the inconsistency results from different
types of timing constraints. We consciously stick to
only three different constraints in our example to keep
it comprehensible, although we implemented our ap-
proach for all of the presented timing constraints.
3 TRANSFORMATION OF
AUTOSAR TIMING
CONSTRAINTS
For consistency checking of timing requirements, we
use a logical approach. In this section we describe the
transformation of AUTOSAR timing requirements
into logical formulae of an SMT (satifiability modulo
theories) solver. The SMT formulae reflect the tempo-
ral constraints predefined by the timing requirements
and thus satisfiability conforms to the existence of a
valid ordering of timing events satisfying all require-
ments. In Figure 3 the abstract concept is shown. The
AUTOSAR model contains the system model, tim-
ing events, which are associated to model elements
in the system model and the AUTOSAR timing con-
straints. The timing events are transformed into SMT
variables and the AUTOSAR timing events are trans-
formed into linear constraints over the generated vari-
ables, while the system model is not needed for the
consistency analysis. The transformations have been
ICSOFT 2020 - 15th International Conference on Software Technologies
18
Table 1: Example Timing Constraints.
Description Requirement
The runnable entities
TssPreprocessing, Logic and
Toggle must be executed in order.
r
eoc
= hTssPreprocessing, Logic, Togglei
The calculation of the indicator
logic shall be completed between
3ms and 4ms after the turn switch
sensor preprocessing has been
started.
r
otc
= (e
s
TssPreprocessing
, e
t
Logic
, 3, 4)
The calculation of the Logic
runnable should be completed in
between 10ms and 30ms.
r
etc
= (Logic, 10, 30)
The calculation of the Toggle
runnable should be completed in
between 1ms and 5ms.
r
etc
2
= (Toggle, 1, 5)
automated and are directly applied on the AUTOSAR
model within SystemDesk.
Some timing constraints are not only based on
timing events, but on runnable entities, for exam-
ple the execution order constraint. To detect incon-
sistencies between those timing constraints and tim-
ing constraints based on timing events, timing con-
straints based on runnable entities are transformed so
that they are also based on timing events. This is
possible since AUTOSAR supports timing events re-
lated to the execution of runnable entities. Thus in
the following we assume that for each runnable en-
tity re ∈ RunnableEntities there exist corresponding
timing events e
s
re
and e
t
re
, which represent the exe-
cution start and termination of the runnable entity.
Some timing constraints also restrict the occurrence
between timing events, thus lower and upper bounds
itself can be defined by the occurrence of another tim-
ing event. Nevertheless, all restrictions can be defined
as linear constraints. Since the restrictions on tim-
ing events are defined by linear constraints, the ex-
istence of a valid model can be checked by search-
ing for a valid valuation t : E → R
≥0
of the tim-
ing events using a SMT solver with linear arithmetic.
For this, we use the SMT solver Z3 (Bjorner and
Phan, 2014). For a given AUTOSAR model with
timing events E = {e
1
. . . e
n
} and timing constraints
R = (r
1
, . . . , r
n
) an SMT formula F =
V
n
i=1
f
r
i
is suc-
cessively constructed. Each term in F is either a con-
stant constraint value (e.g. tolerance or minimum /
maximum values) or a variable, which conforms to a
timing event e and which needs a satisfying assign-
ment into the time domain t : E → R
≥0
. We de-
note the sets of different timing constraint types as
R = R
otc
∪ R
ltc
∪ R
stc
∪ R
eoc
∪ R
etc
. In the following
the transformation for each type of timing constraint
is presented.
Offset Timing Constraint. An offset timing con-
straint r
otc
= (e
s
, e
t
, min, max) constrains the time be-
tween a source timing event e
s
and target timing event
e
t
. Thus, for each timing offset constraint r
otc
∈ R
otc
two expressions are added to the SMT formula as fol-
lows
f
r
otc
= e
s
+ max ≥ e
t
∧ e
s
+ min ≤ e
t
(1)
Latency Timing Constraint. To verify that a la-
tency timing constraint does not conflict with other
timing constraints, for example an offset timing con-
straint, there must be a valid occurrence of timing
events where there exists a sequence of timing events,
which does not exceed the maximum value of a la-
tency timing constraint. Therefore, for each ltc with
chain C = he
1
, . . . , e
n
i the SMT formula is extended
as follows
f
r
ltc
= ∀i, 1 ≤ i ≤ n − 1 : e
i
≤ e
i+1
∧min ≤ e
n
− e
1
≤ max
(2)
Synchronization Timing Constraint. A synchro-
nization timing constraint r
stc
= (S, tolerance), S ⊆ E,
specifies a set of timing events, which must occur si-
multaneously with a tolerance value. So for each syn-
Consistency Analysis of AUTOSAR Timing Requirements
19

Z3SystemDesk
Specification Model Analysis Model
AUTOSAR Model
Timing Events
AUTOSAR
Timing Constraints
Variables
Linear Constraints
SMT Formulae
<<transforms to>>
<<transforms to>>
AUTOSAR
System Model
Figure 3: Transformation of AUTOSAR models into SMT formulae.
chronization timing constraint r
stc
∈ R
stc
, the toler-
ance value is checked for each combination of events:
f
r
stc
= ∀e, e
0
∈ S : e − e
0
≤ tolerance (3)
Execution Order Constraint. For each execution or-
der constraint r
eoc
∈ R
eoc
with a sequence of runnable
entities hre
1
, . . . , re
n
i a successor runnable entity re
i+1
may only be executed after the runnable entity re
i
has
been executed. Thus, ∀i, 1 ≤ i < n : re
i
≤ re
i+1
. Since
our approach relies on finding a satisfiable assignment
based on timing events, we first need to find a mod-
eling alternative, which is equivalent, but is based on
timing events instead of runnable entities. Therefore,
we model the constrained execution of runnable en-
tities by timing events, which represent the start and
stop of a defined runnable and only allow the start
event of a succeeding runnable entity to be later than
the termination event of the runnable entity before. So
let e
s
re
i
and e
t
re
i
be the start and terminated event of a
runnable re
i
. Thus we get
∀i, 1 ≤ i ≤ n − 1 : e
s
re
i
≤ e
t
re
i
∧ e
t
re
i
≤ e
s
re
i+1
(4)
AUTOSAR also allows execution order constraint to
be applied to basic software modules. The naming of
timing events then is different, but the general trans-
formation method presented can be applied analo-
gously.
Execution Time Constraint. The restriction in an
execution time constraint is only within a single AU-
TOSAR element. Nevertheless, a restriction of the
execution time corresponds to having a offset tim-
ing constraint between the execution start and termi-
nation of the associated runnable. Therefore, a exe-
cution time constraint corresponds to having an off-
set timing constraint r
etc
= (r, min, max) = r
otc
with
r
otc
= (e
r
s
, e
r
t
, min, max) where e
r
s
and e
r
t
are the
events associated with the runnable being started and
terminated, respectively.
The generated SMT formulae for the example model
are shown in Table 2. For the execution order con-
straint r
eoc
start events for each runnable must oc-
cur before the corresponding termination event and
the start event for runnable Logic must be before the
termination event of runnable TssPreprocessing.
Analogously the termination event of runnable Logic
must occure before the start event for the Toggle
runnable occurs. Therefore, our approach generates
five inequalities, which constrain the timings as de-
scribed. For the Offset Timing Constraint r
otc
two
inequality clauses are generated, which constrain the
minimum and maximum offset for the timing events.
Finally, for the execution time constraints r
etc
and
r
etc
2
two clauses are generated for each constraint,
which constrain the timing for the start and termina-
tion of the Logic runnable and the Toggle runnable
respectively. Since the requirements are not consis-
tent, the generated set of clauses is unsatisfiable.
4 RESOLVING INCONSISTENT
REQUIREMENTS
In this section we describe methods to resolve incon-
sistent requirements. For this, we propose to compute
the maximum set of satisfiable clauses as well as an
unsatisfiable core and visualize the results.
4.1 Identification of Inconsistency
Causes
To identify defects in an unsatisfiable requirements
set we investigate several methods, which compute a
subset of timing requirements associated with consis-
tency. First we compute the maximum set of satisfi-
able clauses (MaxSMT) (Bjorner and Phan, 2014).
ICSOFT 2020 - 15th International Conference on Software Technologies
20
Table 2: Example Transformations.
Requirement Generated formulae
r
eoc
=
hTssPreprocessing, Logic, Togglei
f
1
= e
s
TssPreprocessing
≤ e
t
TssPreprocessing
f
2
= e
s
Logic
≤ e
t
Logic
f
3
= e
s
Toggle
≤ e
t
Toggle
f
4
= e
t
TssPreprocessing
≤ e
s
Logic
f
5
= e
t
Logic
≤ e
s
Toggle
r
otc
= (e
s
TssPreprocessing
, e
t
Logic
, 3, 4)
f
6
= e
s
TssPreprocessing
+ 3 ≤ e
t
Logic
f
7
= e
s
TssPreprocessing
+ 4 ≥ e
t
Logic
r
etc
= (Logic, 10, 30)
f
8
= e
s
Logic
+ 10 ≤ e
t
Logic
f
9
= e
s
Logic
+ 30 ≥ e
t
Logic
r
etc
2
= (Toggle, 1, 5)
f
10
= e
s
Toggle
+ 1 ≤ e
t
Toggle
f
11
= e
s
Toggle
+ 5 ≥ e
t
Toggle
Definition 2 (Weighted MaxSMT). Given a set of for-
mulae F and numeric weights w ∈ W associated with
each formula by a function c : F → W , the task of
weighted maximum satisfiability solving modulo the-
ories (MaxSMT) is to find a subset I ⊆ F such that
1.
V
f ∈I
f is satisfiable and
2.
∑
f ∈I
c( f ) is maximal in all subsets of F .
Thus, if the set of requirements is not satisfiable,
MaxSMT finds a subset of formulae which maximizes
a defined cost function c. In our case, c( f ) = 1 for all
formulae f , so we give no priorities to certain con-
straints.
Applying MaxSMT in this case finds a largest set
of formulae which are satisfiable. Furthermore, for
traceability we keep a mapping r : F → R , which
maps each formula f back to the timing require-
ment it originated from. With this information a re-
quirements engineer might fix the requirements set
by either discarding or altering / relaxing require-
ments which do not belong to the MaxSMT set, so
that finally the complete requirements set is satisfi-
able. The MaxSMT computation is performed in Z3.
A MaxSMT subset for our example is I = R \ { f
7
}.
Another method for identification of inconsisten-
cies are unsatisfiable cores (unsat core in short).
Definition 3. Let F be a set of formulae which is
unsatisfiable. An unsatisfiable core of F is a subset
F ⊆ F which is unsatisfiable as well.
SMT solvers typically try to compute minimal un-
sat cores. However, neither unsat cores nor MaxSMT
solutions are unique. Given the MaxSMT solution,
and in particular a set of requirements R which are
not part of this solution (and thus potentially incor-
rect), we can compute an unsat core to get the set of
formulae (requirements) which are together inconsis-
tent. Ideally, this is not the entire set of requirements
so that the requirements engineer does not need to
look at all requirements when trying to identify and
correct wrong requirements.
In our example an unsat core would be UC =
{ f
1
, f
4
, f
7
, f
8
}. For those constraints there is no
satisfiable ordering of the events e
s
TssPreprocessing
,
e
t
TssPreprocessing
, e
s
Logic
and e
t
Logic
. Since r
etc
2
does
not contain any clauses of the unsat core, this require-
ment is not responsible for the inconsistency. Thus,
here we can use the unsat core to narrow down the set
of requirements to look at during correction.
4.2 Consistency Visualization
A crucial point for the identification of inconsistency
causes is an adequate result visualization of the gen-
erated MaxSMT and unsat core clauses. In this re-
gard we provide a graph-based visualization of the
MaxSMT and unsat core, where nodes in the graph
represent timing events and directed edges represent
the timing relations (i.e., the SMT clauses) among the
events.
Definition 4 (ResultGraph). Given a set of timing
events E and the set of transformed requirement for-
mulae F , the result graph G = (G
V
, G
E
, c
min
, c
max
) is
the following:
• G
V
= E is the set of nodes containing one node
per timing event,
• G
E
⊆ G
V
× G
V
is the set of directed edges, where
(e, e
0
) ∈ G
E
if the set F contains a formula e ≤
Consistency Analysis of AUTOSAR Timing Requirements
21

e
0
or e + min ≤ e
0
or e + max ≥ e
0
for some
min, max ∈ R,
• c
min
: G
E
→ 2
R
is the minimum distance labeling
function, where min ∈ c
min
(e, e
0
) if the set F con-
tains a formula e + min ≤ e
0
,
• c
max
: G
E
→ 2
R
is the maximum distance label-
ing function, where max ∈ c
max
(e, e
0
) if the set F
contains a formula e + max ≥ e
0
.
For the MaxSMT and unsat core two result graphs
are visualized separately. In the MaxSMT result
graph G
max
nodes are labeled green, if the corre-
sponding clauses, which represent the timing rela-
tions among the events, belong to I and red otherwise.
For the unsat core result graph G
uc
nodes are labelled
green, if they do not belong to UC and green other-
wise.
4.2.1 Example Visualization
Figure 4 shows the graphical representation of the
(generated) events and the timing relationships among
them utilizing our example transformations shown in
Table 2. Timing events which belong to satisfiable
timing requirements are shown in green, while timing
events which belong to unsatisfiable timing require-
ments are shown in red.
5 EVALUATION
In this section, we evaluate the runtime of our ap-
proach based on example architectures. We first
evaluate the runtime of the requirements consistency
checking approach and try to figure out whether the
application to real-world projects is feasible. After-
wards we argue if and how the consistency check-
ing and our timing verification approach can be ef-
ficiently combined and whether our proposed pro-
cess in Figure 1 is reasonable. Since the generated
SMT formulae are linear constraints and the consid-
ered domain is the set of rational numbers, the model
can be solved using the general simplex algorithm
and thus the model is solvable in polynomial runtime
(Kroening and Strichman, 2008). To identify pos-
sible defects in an unsatisfiable requirements set we
compute the maximum set of satisfiable constraints
(MaxSMT). Since the MaxSMT problem is NP-hard,
we presume higher runtime (Garey et al., 1976). Nev-
ertheless, MaxSMT comutation should still be faster
than the verification task itself, because the trans-
formed timed automata model has exponential run-
time in the number of clocks, which can be rather
high, since the full AUTOSAR architecture is trans-
formed. For each test scenario we measure the time
for requirements transformation and the SMT solver
as well as the verification time for the approach de-
scribed in (Beringer and Wehrheim, 2016).
5.1 Test Scenarios
First, the runtime for requirements transformation,
SMT solving and MaxSMT optimization is measured
for each timing constraint type separately and for a set
of different combined timing constraint types. With
this step we identify, if for a predefined size of re-
quirements the runtime for consistency checking and
MaxSMT computation is reasonable. For the mea-
surement of SMT solving and requirements transfor-
mation the timing constraints were generated. For
an offset timing constraint a source and target tim-
ing event with a minimum and maximum offset be-
tween 1ms and 10ms were selected randomly. For an
execution order constraint 5 runnables were selected
randomly and for each synchronization timing con-
straint 3 timing events were selected randomly. We
limit the size to 10, because otherwise the timing ver-
ification task takes too long. For the MaxSMT opti-
mization measurement we generated an unsatisfiable
set, for which the solver computes the maximum sat-
isfiable set. Afterwards the runtime for timing verifi-
cation is measured based on two different generated
architecture models and compared to the consistency
check to have an idea whether consistency checking
is generally favorable before the verification task to
save time. One model M
1
contains only of a lim-
ited set of software components and very few tasks,
whereas a second model M
2
is more complex con-
taining more software components and tasks. Table 4
gives an overview of the complexity of those models.
Since most of the requirements sets generated are in-
consistent, the subsequent timing verification would
fail for at least one requirement.
5.2 Evaluation Setup
The SMT solver used is Z3 version 4.6.0-x64. For
timing verification UPPAAL version 4.0.13 is used
(Behrmann et al., 2004). The test scenario execution
and runtime measurement is performed on a Windows
7 Professional system with an Intel Core i7 4800MQ
with 8GB memory. UPPAAL was used with BFS
search order, conservative state space reduction and
DBM state space representation. The runtime is mea-
sured in seconds. The symbols used in the results are
explained in Table 3.
ICSOFT 2020 - 15th International Conference on Software Technologies
22

Figure 4: ResultGraph for MaxSMT.
Table 3: Description of symbols.
Symbol Description
T (t) Runtime for transformation of requirements into SMT in seconds
T (smt) Runtime for SMT solving in seconds
T (msat) Runtime for MaxSMT in seconds
T (tv) Runtime for model transformation into timed automata
T (v) Runtime for timing verification in seconds
ratio Runtime ratio in percentage
T (t)+T (smt)+T (msat)
T (tv)+T (v)
∗ 100
5.3 Results
Table 5 shows runtime measurements for the compu-
tation of the maximum satisfiable set of constraints
and the timing verification for both M
1
and M
2
. The
table shows, that transformation of the AUTOSAR el-
ements into Z3-SMT takes a significant amount of
time (T (t)). This is partly due the fact that the ele-
ments are accessed via an automation interface of the
AUTOSAR authoring tool, which is less efficient than
a direct access due to technological reasons. Further-
more, the transformation algorithm has not been op-
timized by now. Nevertheless, the time is acceptable
compared to the time needed for timing verification.
T(t), T(smt) and T(msat) are identical for test sce-
narios with the same requirements R , even on dif-
ferent architecture models (e.g. test scenarios 1 and
5). This is evident since the runtimes, which belong
to the requirements checking part, are independent of
the rest of the AUTOSAR architecture.
The model transformation into timed automata
and the verification runtime is obviously largely de-
pendent on the size and complexity of the overall
AUTOSAR architecture model. While transformation
and verification of the requirements of M
1
is fast with
a maximum runtime of 20.1 and 11 seconds for test
scenario 4, the same requirements embedded in ar-
Table 4: Test scenarios for verification runtime.
M
1
M
2
Software Components 5 8
Runnable Entities 10 80
Tasks 5 8
chitecture M
2
can take up to roughly 2 minutes for
transformation and 36 minutes for verification in test
scenario 8. Finally, we measured the runtimes for the
running example, which consists of 5 software com-
ponents, 8 runnables and 3 tasks, which is a rather
simple model. The transformation and consistency
check took 4.5 and 0.1 seconds respectively, while
verification took only 1.4 seconds.
The ratio between requirement checking and veri-
fication emphasizes the key result. While in test sce-
narios 1 to 4, which perform the verification task on
the simple model M
1
, the consistency check takes
roughly 30% to 80% of the verification time, in test
scenarios 5 to 8, the consistency check only takes a
small proportion with 0.6% to 3.5%. So on more com-
plex architectures consistency checking is valuable,
while on simple architectures, consistency checking
may be omitted. Nevertheless, since we assume that
real world examples may more often be complex, and
the set of requirements is usually much greater, it is
generally favorable to perform the consistency check
before the verification task as we proposed in our pro-
cess presented in the beginning.
Test results 9-14 show how our approach scales
with more timing requirements as for each type we
extend the generated set to 100. Furthermore, we
evaluate, if there are performance differences, when
we use a satisfiable set instead of an unsatisfiable.
While SMT solving time is still acceptable for all tim-
ing requirements, MaxSMT gets considerably slow
for execution order constraints and synchronization
timing constraints. The differences between satisifa-
ble and unsatisfiable sets are rather small. MaxSMT is
faster on the satisfiable set of offset timing constraints
Consistency Analysis of AUTOSAR Timing Requirements
23
Table 5: Runtimes for requirements transformation, SMT-Solving, MaxSMT computation and verification.
Id M |R
otc
| |R
eoc
| |R
stc
| SAT T (t) T (smt) T (msat) T (tv) T (v) ratio
1 M
1
10 0 0 unsat 5,4 0.06 0.04 13 3.0 34.4
2 M
1
0 10 0 unsat 10.9 0.02 0.07 17.2 5.0 49.5
3 M
1
0 0 10 unsat 8.1 0.04 0.04 15.6 8.0 34.6
4 M
1
10 10 10 unsat 24.1 0.1 0.13 20.1 11.0 78.2
5 M
2
10 0 0 unsat 5.4 0.06 0.04 67.5 88.9 3.5
6 M
2
0 10 0 unsat 10.9 0.02 0.07 65.7 864.4 1.2
7 M
2
0 0 10 unsat 8.1 0.04 0.04 72.9 1229 0.6
8 M
2
10 10 10 unsat 24.1 0.1 0.13 110 2168.7 1.1
9 M
2
100 0 0 unsat 31.9 0.1 1.3 80 - -
10 M
2
0 100 0 unsat 252 0.42 209 571 - -
11 M
2
0 0 100 unsat 52.7 0.56 339 328 - -
12 M
2
100 0 0 sat 33.3 0.1 0.4 81 - -
13 M
2
0 100 0 sat 219 0.39 154 567 - -
14 M
2
0 0 100 sat 57.1 0.54 335 331 - -
and on the execution order constraints, while there are
only minor differences on the synchronization timing
constraints. Due to the slightly differently generated
sets, transformation times also differ a little bit. Since
timing verification for all requirements would take too
long, we omitted verification time and ratio.
Finally, the efficiency of our process presented
in Section 1 also depends on how difficult it is to
model the timing requirements and on the modeling
skills of the software architect, because this influ-
ences the probability of faulty timing requirements.
When there is less probability of finding inconsistent
requirements sets, it may be favorable to omit the re-
quirements checking process since it always extends
the absolute verification pipeline runtime.
6 RELATED WORK
Several methods and languages for the formal specifi-
cation of timing constraints exist, for example CCSL
(Andr
´
e, 2009), (Mallet and Simone, 2015), which has
been adopted by EAST-ADL (EAST-ADL Associa-
tion, 2013) for automotive use cases, TSSD (Klein
and Giese, 2007), UPL (Teige et al., 2016), SALT
(Bauer et al., 2006) or real-time pattern languages
(Gruhn and Laue, 2006). Usually, for verification
the approaches define transformations into lower level
logics like TLTL, MTL or TCTL, or into observers
based on executable C-Code. In our approach we fo-
cused on the widely used standard AUTOSAR and the
integrated AUTOSAR Timing Constraints.
Methods, which check consistency of modeling
artifacts, e.g. UML models, are presented in (Rasch
and Wehrheim, 2003; Seifert et al., 2005; Kotb and
Katayama, 2005; Simmonds and Bastarrica, 2005;
Kalibatiene et al., 2013; Derrick et al., 2002; Ab-
delhalim et al., 2011) or for SysML in (Jacobs and
Simpson, 2017). Usually consistency is treated as a
property between different model diagram views, dif-
ferent model versions or models at different levels of
abstraction (Mens et al., 2005; Engels et al., 2001).
This is somewhat different to our approach, since we
are only interested in the consistency of a set of re-
quirements, which is captured altogether in one single
model. Therefore, our model always complies to the
AUTOSAR meta-model. Therefore, many types of
inconsistencies, for example syntactical inconsisten-
cies, do not arise. Nevertheless, further rules, which
describe the static semantics of AUTOSAR, are de-
fined textually and are only checked partially.
In (Mahmud et al., 2016) structured requirements
specifications are transformed into SAT formulae to
find logical inconsistencies by identifying antonyms.
In the context of product line engineering, Mendonca
et al. (Mendonc¸a et al., 2009) check feature models
by transformation into propositional logic.
In (Post et al., 2011b) and (Post et al., 2011a) sys-
tem requirements are formulated in the real-time logic
Duration Calculus (Chaochen et al., 1991). Verifica-
tion of the properties is performed by transformation
of every requirement into a Phase Event Automaton
(PEA) and subsequently into an UPPAAL-verifiable
timed automaton.
Verification of timed automata-based real-time
systems is presented e.g. in (Kim et al., 2015), where
a novel analysis framework is shown, which com-
bines symbolic and statistical model checking in UP-
PAAL to speed up verification runtime. A similar ap-
proach for consistency checking timing requirements
is presented in (Toennemann et al., 2018). In contrast
to our approach the authors use timing requirements
ICSOFT 2020 - 15th International Conference on Software Technologies
24

and a system design model to check for consistency,
whereas we propose a multi-step approach where we
only employ the requirements set itself for the consis-
tency checking and only add the system architecture
for verification purpose.
7 CONCLUSION
In this paper we presented an approach to support
the early validation of AUTOSAR software architec-
tures by simplifying the process of AUTOSAR tim-
ing requirements specifications. We presented an ap-
proach for checking consistency of AUTOSAR tim-
ing requirements, which improves the requirements
quality. Especially by computing the maximum set
of satisfiable timing requirements the user can easily
identify faulty model elements. We showed that the
consistency checking only takes a fraction of time in
comparison with the verification task, which has to be
performed afterwards. Thus checking consistency be-
fore verification can be very beneficial in the case of
an inconsistent requirement set, but does not signifi-
cantly slow down the whole verification process even
in the case of consistent requirements sets. In the fu-
ture we will evaluate our approach on more realistic
examples.
REFERENCES
Abdelhalim, I., Schneider, S., and Treharne, H. (2011).
Towards a Practical Approach to Check UML/fUML
Models Consistency Using CSP. In ICFEM 2011, vol-
ume 6991, pages 33–48. Springer Berlin Heidelberg.
Andr
´
e, C. (2009). Syntax and Semantics of the Clock Con-
straint Specifcation Language (CCSL). Phd., Inria In-
stitute, Sophia Antipolis.
AUTOSAR (2019). AUTomotive Open System AR-
chitecture Methodology. https://www.autosar.
org/fileadmin/user upload/standards/classic/19-11/
AUTOSAR TR Methodology.pdf.
Bauer, A., Leucker, M., and Streit, J. (2006). SALT -
Structured Assertion Language for Temporal Logic.
In ICFEM 2006, volume 4260 of LNCS. Springer.
Behrmann, G., David, R., and Larsen, K. G. (2004). A tu-
torial on uppaal. In Formal Methods for the Design of
Real-Time Systems, pages 200–236. Springer.
Beringer, S. and Wehrheim, H. (2016). Verification of
AUTOSAR Software Architectures with Timed Au-
tomata. In FMICS-AVoCS 2016, volume 9933 of
LNCS, pages 189–204. Springer.
Bjorner, N. and Phan, A.-D. (2014). vZ - Maximal Satis-
faction with Z3. In SCSS 2014, volume 30 of EPiC
Series in Computing, pages 1–9. EasyChair.
Chaochen, Z., Hoare, C., and Ravn, A. P. (1991). A Cal-
culus of Durations. Information Processing Letters,
40(5):269–276.
Derrick, J., Akehurst, D., and Boiten, E. (2002). A frame-
work for UML consistency. In UML 2002 Workshop
on Consistency Problems in UML-based Software De-
velopment, volume 2460 of LNCS, pages 182–196.
Springer.
EAST-ADL Association (2013). EAST-ADL Domain
Model Specification.
Engels, G., Heckel, R., and K
¨
uster, J. M. (2001). Rule-
Based Specification of Behavioral Consistency Based
on the UML Meta-model. In UML 2001, volume 2185
of LNCS, pages 272–286. Springer Berlin Heidelberg.
Garey, M. R., Johnson, D. S., and Stockmeyer, L. (1976).
Some simplified NP-complete graph problems. Theo-
retical Computer Science, 1(3):237–267.
Gruhn, V. and Laue, R. (2006). Patterns for Timed Prop-
erty Specifications. In Electronic Notes in Theoretical
Computer Science, volume 153, pages 117–133.
IEEE (1998). IEEE 830-1998 Recommended Practice for
Software Requirements Specifications.
Jacobs, J. and Simpson, A. (2017). On the formal interpreta-
tion and behavioural consistency checking of SysML
blocks. Software & Systems Modeling, 16(4):1145–
1178.
Kalibatiene, D., Vasilecas, O., and Dubauskaite, R. (2013).
Rule Based Approach for Ensuring Consistency in
Different UML Models. In Information Systems 2013,
volume 161 of LNBIP, pages 1–16. Springer.
Kim, J. H., Larsen, K. G., Nielsen, B., Mikucionis, M.,
and Olsen, P. (2015). Formal Analysis and Testing
of Real-Time Automotive Systems Using UPPAAL
Tools. In FMICS 2015, volume 9128 of LNCS, pages
47–61. Springer.
Klein, F. and Giese, H. (2007). Joint Structural and Tem-
poral Property Specification Using Timed Story Sce-
nario Diagrams. In FASE 2007, volume 4422 of
LNCS, pages 185–199. Springer.
Kotb, Y. and Katayama, T. (2005). Consistency Checking
of UML Model Diagrams Using the XML Semantics
Approach. In WWW 2005, pages 982–983. ACM.
Kroening, D. and Strichman, O. (2008). Decision Proce-
dures: An Algorithmic Point of View. Springer Berlin
Heidelberg.
Mahmud, N., Seceleanu, C., and Ljungkrantz, O. (2016).
ReSA Tool: Structured Requirements Specification
and SAT-based Consistency-checking. In FedCSIS
2016, pages 1737–1746. IEEE.
Mallet, F. and Simone, R. d. (2015). Correctness issues
on MARTE/CCSL constraints. Science of Computer
Programming, 106:78–92.
Mendonc¸a, M., Wasowski, A., and Czarnecki, K. (2009).
SAT-based Analysis of Feature Models is Easy. In
SPLC 2009, pages 231–240. ACM.
Mens, T., Van der Straeten, R., and Simmonds, J. (2005).
A Framework for Managing Consistency of Evolving
UML Models. In Software Evolution with UML and
XML, pages 1–30. IGI Global.
Consistency Analysis of AUTOSAR Timing Requirements
25

Post, A., Hoenicke, J., and Podelski, A. (2011a). rt-
inconsistency: a new property for real-time require-
ments. In FASE 2011, volume 6603 of LNCS.
Springer.
Post, A., Podelski, A., and Hoenicke, J. (2011b). Vacuous
real-time requirements. In RE 2011, pages 153–162.
IEEE.
Rasch, H. and Wehrheim, H. (2003). Checking Consistency
in UML Diagramms. In FMOODS 2003, volume 2884
of LNCS, pages 229–243. Springer.
Richter, K. (2005). Compositional Scheduling Analysis Us-
ing Standard Event Models: The SymTA/S Approach.
Dissertation, Braunschweig.
Seifert, T., Jug, F., and Rackl, G. (2005). Automated Qual-
ity Assurance for UML Models. In Informatik 2005
- Informatik LIVE!/2, volume 68 of LNI, pages 496–
500. GI.
Simmonds, J. and Bastarrica, M. C. (2005). A tool for au-
tomatic UML model consistency checking. In ASE
2005, page 431. ACM.
Teige, T., Tom, B., and Holberg, H. J. (2016). Universal Pat-
tern: Formalization, Testing, Coverage, Verification
and Test Case Generation for Safety-Critical Require-
ments. In MBMV 2016. Albert-Ludwigs-Universit
¨
at
Freiburg.
Toennemann, J., Rausch, A., Howar, F., and Cool, B.
(2018). Checking Consistency of Real-Time Require-
ments on Distributed Automotive Control Software
Early in the Development Process Using UPPAAL. In
FMICS 2018, volume 11119 of LNCS, pages 67–82.
Springer.
ICSOFT 2020 - 15th International Conference on Software Technologies
26
