
A Deep Learning Tool to Solve Localization in Mobile Autonomous
Robotics
Sergio Cebollada
a
, Luis Pay
´
a
b
, Mar
´
ıa Flores
c
, Vicente Rom
´
an
d
, Adri
´
an Peidr
´
o
e
and Oscar Reinoso
f
Department of Systems Engineering and Automation, Miguel Hern
´
andez University, Elche, Spain
Keywords:
Mobile Robotics, Omnidirectional Images, Holistic Description, Deep Learning, Hierarchical Localization.
Abstract:
In this work, a deep learning tool is developed and evaluated to carry out the visual localization task for mobile
autonomous robotics. Through deep learning, a convolutional neural network (CNN) is trained with the aim
of estimating the room where an image has been captured, within an indoor environment. This CNN is not
only used as tool to solve a room estimation, but it is also used to obtain global-appearance descriptors of the
input image from its intermediate layers. The localization task is addressed in two different ways: globally,
as an image retrieval problem and hierarchically. About the global localization, the position of the robot is
estimated by using a nearest neighbour search between the holistic description obtained from a test image and
the training dataset (using the CNN to obtain the descriptors). Regarding the hierarchical localization method,
first, the CNN is used to solve the rough localization step and after that, it is also used to obtain global-
appearance descriptors; second, the robot estimates its position within the selected room through a nearest
neighbour search by comparing the obtained holistic descriptor with the visual model contained in that room.
Throughout this work, the localization methods are tested with a visual dataset that provides omnidirectional
images from indoor environments under real-operation conditions. The results show that the proposed deep
learning tool is an efficient solution to carry out visual localization tasks.
1 INTRODUCTION
Over the past few years, omnidirectional imaging has
been proposed by several authors to solve mobile au-
tonomous robotics tasks, since it has proved to be a
robust option (Pay
´
a et al., 2017). This type of cam-
eras are able to provide a high quantity of informa-
tion from the environment that surrounds them, with
a field of view of 360 deg., with only one snapshot.
For instance, Abadi et al. propose an omnidirec-
tional vision system to detect obstacles through an al-
gorithm to carry out autonomous navigation (Abadi
et al., 2015). More recently, Liu et al. propose accu-
rate estimation of the position and orientation of the
robot within an outdoor environment by means of om-
nidirectional images (Liu et al., 2018).
a
https://orcid.org/0000-0003-4047-3841
b
https://orcid.org/0000-0002-3045-4316
c
https://orcid.org/0000-0003-1117-0868
d
https://orcid.org/0000-0002-3706-8725
e
https://orcid.org/0000-0002-4565-496X
f
https://orcid.org/0000-0002-1065-8944
To carry out the localization and mapping tasks
by using this visual information, an extraction of the
most relevant information must be tackled. Among
the two most common methods, this work proposes
the use of global-appearance (or holistic) description
methods, since this methodology leads to more di-
rect localization algorithms based on a pairwise com-
parison between descriptors. For example, Korrap-
ati and Mezouar use global-appearance descriptors to
create topological maps by means of omnidirectional
images (Korrapati and Mezouar, 2017), and Do et
al. use global-appearance description together with
Group LASSO Regression to develop an autonomous
mobile navigation (Do et al., 2018).
As for the hierarchical localization, the process
conducted in previous works such as (Pronobis and
Jensfelt, 2011) or (Pay
´
a et al., 2018) consists basi-
cally in (1) carrying out a rough but fast localization in
a high-level map composed by representative descrip-
tors and after that, (2) solving the fine localization in a
low-level map composed by the instances that are rep-
resented by the descriptors selected in the rough step.
These previous works have proved the effectiveness
232
Cebollada, S., Payá, L., Flores, M., Román, V., Peidró, A. and Reinoso, O.
A Deep Learning Tool to Solve Localization in Mobile Autonomous Robotics.
DOI: 10.5220/0009767102320241
In Proceedings of the 17th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2020), pages 232-241
ISBN: 978-989-758-442-8
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

of hierarchical maps to solve the localization prob-
lem departing from global-appearance descriptors ob-
tained from omnidirectional images. In particular, the
aim of the present work is to carry out the localization
task in indoor environments using omnidirectional vi-
sual information as a simple image retrieval problem
and also to solve the localization by means of hierar-
chical topological models.
Regarding the use of Artificial Intelligence (AI),
these techniques have been proposed in many contri-
butions to improve the performance of mapping and
localization algorithms in mobile robotics. For in-
stance, Dymczyk et al. propose the use of a clas-
sifier to classify landmark observations and conduct
the localization task more robustly (Dymczyk et al.,
2018). Meattini et al. present a human-robot interface
in which the robot learns the optimal hand config-
uration for grasping through electromyography sen-
sors and merging pattern recognition and factoriza-
tion techniques (Meattini et al., 2018). Within the
AI approaches, the deep learning branch has gained
much popularity in solving these problems by means
of computer vision. These methods try to construct
automatically high level data models through archi-
tectures that allow linear, non-linear, multiple and it-
erative transformations (Bengio et al., 2013) from the
initial data matrices. The idea is to train the architec-
ture to reach a model that is capable of creating rep-
resentations which best define the inputs. Regarding
the robotics topic, a number of previous works pro-
pose the use of deep learning techniques. For exam-
ple, Lenz et al. use a deep learning approach to solve
the problem of detecting robotic grasps (Lenz et al.,
2015); as for mobile robotics, Zhu et al. propose deep
reinforcement learning to address target-driven visual
navigation (Zhu et al., 2017). The aim of the present
work is to solve the visual localization task through
Convolutional Neural Networks (CNNs), since these
networks have been successfully used to solve com-
puter vision applications such as face recognition or
navigation in self-driving cars. The idea in this case
is to create a CNN that is able to distinguish between
different rooms from an indoor environment in order
to estimate correctly in which room the robot cur-
rently is. There are well known CNN architectures,
such as AlexNet, that was introduced by Krizhevsky
et al. (Krizhevsky et al., 2012). This network consists
of eight layers (five convolutional layers and three
fully connected layers) with a final 1000-way softmax
and three pooling layers, and it is trained to classify
images into 1000 object categories. GoogLeNet was
proposed by Szegedy et al. (Szegedy et al., 2015). It
has 22 layers and it is also trained for object classi-
fication but it uses 12 times fewer parameters than
AlexNet. A broad review of the more outstanding
CNNs can be found in (Pak and Kim, 2017).
These popular networks, together with many oth-
ers that have produced successful results, have been
used in the present work as starting point to de-
velop new tools with different objectives, that is, these
CNNs are reused to carry out different tasks. We use
the following methods to adapt these networks to our
needs.
• Reusing common CNN architectures. Transfer
learning is a technique that consists in reusing the
architecture and parameters of a CNN as a start-
ing point to build a new CNN with a different
aim. The main idea is to get profit of most of
the intermediate layers, because their parameters
have been tuned from millions of images and con-
tain useful information. This technique can save a
huge amount of time for training and even obtain
better results than creating a new network from
scratch. This idea has already been used by au-
thors such as Wozniak et al., who use the transfer
learning technique to retrain the VGG-F network
to classify places among 16 rooms acquired by a
humanoid robot (Wozniak et al., 2018). Neverthe-
less, transfer learning works only if no early lay-
ers need to be modified, because the downstream
architecture and parameters are no longer valid.
Therefore, in these situations, transfer learning
can not be used and training a network from
scratch is necessary. Creating an entire network
architecture is complex, hence, rather than trying
to build an architecture from scratch, the present
work proposes to develop the CNN through using
common architectures developed by experts. In
this way, the approach is similar to transfer learn-
ing (starting with pre-existing architectures), but
starting from scratch with the parameters tuning.
• Generation of global-appearance descriptors from
the intermediate layers activation. The process
is basically the following. Once the CNN is prop-
erly available to face the desired task, the hidden
layers perform vector description which originally
is used to solve the CNN task, but it can be ex-
tracted as a global-appearance descriptor of the
input image and used for a different purpose. This
idea has already been proposed by some authors
such as Mancini et al., who use this visual in-
formation to carry out place categorization with
a Na
¨
ıve Bayes classifier (Mancini et al., 2017).
Pay
´
a et al. propose CNN-based descriptors to cre-
ate hierarchical visual models for mobile robot lo-
calization (Pay
´
a et al., 2018). Moreover, Cebol-
lada et al. (Cebollada et al., 2019) tackle an eval-
uation of global-appearance descriptors obtained
A Deep Learning Tool to Solve Localization in Mobile Autonomous Robotics
233

from different layers of the pre-trained places
CNN (Zhou et al., 2014) for mobile localization.
Therefore, the objective of this work is to evalu-
ate the performance of convolutional neural networks
which have been adapted and used to carry out the
mapping and localization tasks for mobile robotics in
indoor environments. The proposed experiments will
measure the efficiency of this tool through its ability
to estimate the position of the robot and the comput-
ing time required for it. Additionally, only images ob-
tained by an omnidirectional vision system are used
as source of information to solve the mapping and
localization tasks. These images are obtained from
an indoor dataset captured under real-operation con-
ditions.
The remainder of the paper is structured as fol-
lows. Section 2 presents briefly the CNN devel-
oped for this work. Section 3 explains the localiza-
tion method proposed by means of the deep learn-
ing tool. After that, section 4 outlines the experi-
ments that were carried out to evaluate the validity of
the proposed method for localization. Last, section 5
presents the conclusions and future works.
2 THE CONVOLUTIONAL
NEURAL NETWORK
DEVELOPED
As section 1 outlines, the objective of this work is to
develop and test a localization framework which per-
forms efficiently in mobile robotics through visual in-
formation. A CNN is proposed as tool to carry out this
task. The aim is to solve the visual localization hierar-
chically. This paper presents the idea of developing a
CNN which is able to estimate the room in which the
robot captured the image. Afterwards, a holistic de-
scriptor is obtained from an intermediate layer of the
same CNN to estimate more accurately the position
of the image within the predicted room. This process
will be explained deeply in section 3. Hence, a clas-
sification CNN must be developed firstly, to estimate
the room within the environment.
The CNN basically consists in predicting the la-
bel of the given input data (in this case, images). The
labels (also known as targets) represent the possible
categories within the environment. Before using this
tool for prediction, the model requires a training with
a huge variety of input data (x
train
) and their corre-
sponding labels (y
train
). Then, the CNN is ready to
receive new data (x
test
) and estimate their categories
(y
estimated
).
2.1 The Dataset
The dataset of images used to train the CNN
is the Freiburg Dataset, which has been obtained
from the COLD (COsy Localization Database)
database (Pronobis and Caputo, 2009). The COLD
database is composed by images captured from differ-
ent indoor environments through several sensors un-
der three illumination conditions (cloudy days, sunny
days and at nights) and they are also affected by pres-
ence of dynamic changes such as people walking or
furniture changes and also by the blur effect. These
images were captured following a trajectory along
the whole environment. Among all the images pro-
vided, this work uses the omnidirectional images cap-
tured from the Freiburg environment. This dataset is
also used to evaluate the localization task. Never-
theless, before training the CNN, a conversion from
omnidirectional to panoramic images is carried out
with the aim of comparing the obtained results with
other global-appearance description methods based
on panoramic or standard images. Additionally, the
use of panoramic images constitutes an interesting op-
tion, since CNNs traditionally work with conventional
(non panoramic) images.
Fig. 1 shows the bird’s eye view of the Freiburg
environment and the path that the robot traversed to
obtain the images. The images of the Freiburg dataset
were captured in 9 different rooms. The cloudy
dataset was captured during cloudy days and it is the
least affected by illumination conditions. Hence, this
dataset is used as training dataset. The sunny and
night datasets provided by the Freiburg COLD DB are
used to evaluate the localization task under changes
of illumination. Additionally, in order to establish
a trustworthy comparison with previous works, the
dataset is downsampled with the objective of obtain-
ing visual information with a distance of 20 cm be-
tween consecutive images. The resulting images com-
pose the training dataset and the rest of images are
used to create a test dataset which will be used to eval-
uate the CNN accuracy and also the efficiency of the
hierarchical localization method proposed. Table 1
shows the datasets used for this work and the number
of images that each of them contains.
Due to the amount of parameters which compose
a CNN, a large image dataset is required to tune them.
Nevertheless, the datasets available to solve a specific
task are not always as large as required to train a CNN
from scratch and then, the deep model trained can
not reach enough accuracy. This issue has been com-
monly solved through data augmentation. This tech-
nique basically consists in creating new data by apply-
ing different effects over the original images. To cite
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
234

1
Printer area
2
Corridor
3
Kitchen
4
L
arge office
5
Two
-
persons
office 1
6
Two
-
persons
Office 2
Window
Start point
7
One
-
person
Office
8
Bath room
9
Stairs area
1
4
5
6
7
9
8
3
2
2
1
Corridor
2
One
-
person
office
3
Stairs area
4
Two
-
persons
office
5
Bath room
Window
Start point
5
3
1
2
4
1
Part B
Maps of the two parts of the laboratory in Freiburg with approximate paths followed by the robot during data acquisition. The standard path is
represented with blue dashes and the extended path is represented with red dashes. Arrows indicate the direction in which the robot was driving.
Figure 1: Bird’s eye view of the Freiburg and environment.
Extracted from (Ullah et al., 2007). The red dashed line is
the path selected to obtain the images.
Table 1: Number of images of the training and test datasets
in each room. Images obtained from the Freiburg environ-
ment.
Name
Number
of images
in Training
Number
of images
in Test
1. Printer area 44 285
2. Corridor 212 1182
3. Kitchen 51 229
4. Large Office 34 132
5. 2-persons office 1 46 233
6. 2-persons office 2 26 158
7. 1-person office 31 218
8. Bathroom 49 190
9. Stairs area 26 151
Total number 519 2778
one example, Guo and Gould proposed to use data
augmentation to improve a CNN training with the aim
of solving an object detection task (Guo and Gould,
2015). The data augmentation proposed in this work
consists in applying visual effects over the original
images that can actually occur when images are cap-
tured in real-operation conditions: Random rotation,
(a) Original.
(b) Rotated.
(c) Dark.
(d) Noise.
Figure 2: Example of data augmentation. (a) Original im-
age captured within the Freiburg environment. An effect is
applied over each image: (b) random rotation, (c) darkness,
(d) Gaussian noise.
reflection, darkness/brightness addition to the image,
Gaussian noise, occlusions and blur effect. The fig.
2 shows examples of some of the effects applied over
an original image. Hence, in order to train the CNN,
instead of using the 519 images of the original train-
ing dataset, the network is trained with the augmented
version (composed by 49824 images).
2.2 The Architecture and Training
In this work, we propose to use the AlexNet archi-
tecture as the base of the proposed CNN tool. The
choice of AlexNet as starting point architecture to
carry out the learning is due to the successful perfor-
mance showed by other authors regarding its use for
transfer learning such as (Han et al., 2018) and also
for the simplicity of its architecture.
Therefore, some layers of the AlexNet architec-
ture are replaced to adapt the output to the classifi-
cation task desired (estimation among the 9 rooms
which belong to the Freiburg environment in this
work) and also to receive panoramic images as in-
put. As for the replacement of layer to achieve the
A Deep Learning Tool to Solve Localization in Mobile Autonomous Robotics
235
classification desired, the three last layers which are
replaced are the fully connected layer f c
8
, the soft-
max layer and the classification layer. Additionally,
regarding the input layer, since this layer was config-
ured in AlexNet to receive 227 × 227 × 3 images, it
is replaced to receive 128 ×512 × 3 images. Through
this last change, despite the parameters of the convo-
lutional layers are reset, we avoid a resizing of the
input images which could affect their resolution and
hence, effectiveness of the network created. After
these changes of the original CNN, the network is
ready to be trained with the new data in the train-
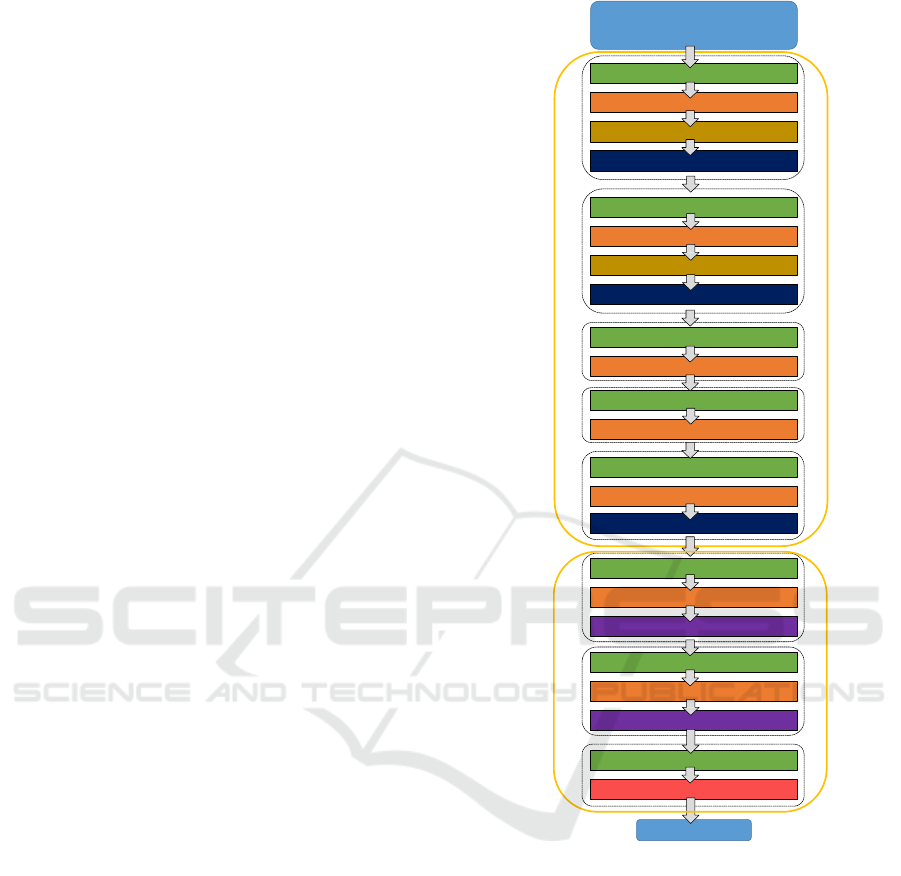
ing dataset. The fig. 3 shows the final architecture
used along this work. We trained the CNN off-line
on NVIDIA GEFORCE GTX 1080TI
R
GPU system.
The training time was around 4 hours. After every 30
iterations, the performance of the partially trained net-
work was evaluated by using the data for validation.
3 MAPPING AND
LOCALIZATION THROUGH
THE CNN
As explained previously in section 1, one of the aims
of this work is to use the holistic descriptors gener-
ated by the intermediate layers of the CNN to carry
out the localization task. Regarding this description
method, it basically consists in introducing the im-
age into the CNN and retaining the data stored in one
of the layers. In the case of the fully connected lay-
ers which compose the classification phase, they di-
rectly provide data arranged in a vector, hence, these
data can be directly used as global-appearance de-
scriptor. Apart from the descriptors obtained from the
fully connected layers, Cebollada et al. showed that
the data from the 2D convolutional layers conv
4
and
conv
5
in the training phase are also interesting to ob-
tain characteristic information from the images (Ce-
bollada et al., 2019). For these layers, the data are
arranged in N
ch
matrices, where N
ch
is the number
of channels in the convolutional layer. Hence, first,
a channel is selected among the rest, and after that,
the matrix is re-arranged in a vector that is used as
descriptor. The descriptors obtained from the conv
4
and conv
5
layers led to better localization results than
the descriptors obtained from f c
6
, f c
7
and f c
8
. This
is due to the fact that CNNs learn to detect features
like color and edges in the first convolution stages and
then, in deeper layers, the network learns more com-
plicated features related to the problem to solve (in
the case of AlexNet, object classification). Moreover,
the size of the descriptors obtained from the convolu-
2D Convolutional (
2
)
Dropout
Image Features
Features Classification
Input
[128x512x3]
2D Convolutional (
1
)
Relu
Normalization
Pooling
Relu
Normalization
Pooling
2D Convolutional (
3
)
Relu
Pooling
Softmax
Output
2D Convolutional (
4
)
2D Convolutional (
5
)
Relu
Relu
Fully connected(
6
)
Fully connected(
7
)
Fully connected(
8
)
Relu
Dropout
Relu
Figure 3: The CNN architecture created by departing from
the AlexNet architecture. The input layer is replaced to re-
ceive images with [128 × 512 × 3] size and the last three
layers ( f c
8
, softmax and the classification layer) are also
replaced to adapt the network to the classification task pro-
posed.
tional layers are smaller, hence, the localization algo-
rithm requires lower computing time.
Therefore, this work evaluates the use of the layers
conv
4
, conv
5
, f c
6
, f c
7
and f c
8
of the retrained CNN
to obtain holistic descriptors for solving the map-
ping and localization tasks. This paper also presents
a comparison between these global-appearance de-
scriptors and classic descriptors based on analytic
tools such as HOG (Histogram of Oriented Gradi-
ents) (Dalal and Triggs, 2005) or gist (Oliva and Tor-
ralba, 2006) to solve the mapping and localization
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
236

task by means of panoramic images.
This way, regarding the mapping task, the CNN
is trained for two purposes: (1) estimating the room
(used in the first step of the hierarchical localiza-
tion) and (2) obtaining holistic description informa-
tion from a layer (used to solve the conventional lo-
calization task as an image retrieval problem and also
in the second step of the hierarchical localization).
As for the conventional localization task, the
whole process is as follows. A test image im
test
is
captured from an unknown position within the en-
vironment. The holistic descriptor
#»
d
test
is obtained
from the CNN and after that, it is compared with
all the descriptors contained in the training dataset
D = {
#»
d
1
,
#»
d
2
,...,
#»
d
Ntrain
} and the most similar de-
scriptor
#»
d
k
is retained. Last, the position of im
test
is
estimated as the coordinates where im
k
was captured.
Finally, if a hierarchical localization alternative
is desired instead of the conventional method, the
process conducted in previous works such as (Pay
´
a
et al., 2018) or (Cebollada et al., 2019) consists ba-
sically in an nearest neighbour search with differ-
ent levels of granularity. Nevertheless, the process
proposed in this work consists in the following. A
test image im
test
is introduced into the CNN and an
estimation about the most likely room c
i
in which
the image was captured is tackled (rough localiza-
tion step). Apart from the estimated room, the CNN
also provides the holistic descriptor
#»
d
test
from a se-
lected layer. Afterwards, a nearest neighbour search
is carried out (fine localization step). That is, the ob-
tained descriptor
#»
d
test
is compared with the descrip-
tors D
c
i
= {
#»
d
c
i
,1
,
#»
d
c
i
,2
,...,
#»
d
c
i
,N
i
} from the training
dataset which belong to the predicted room c
i
, and
then, the most similar descriptor
#»
d
c
i
,k
is retained. Fi-
nally, the position of im
test
is estimated as the coordi-
nates where im
c
i
,k
was captured. The fig. 4 shows a di-
agram regarding the hierarchical localization method
proposed in the present work.
4 EXPERIMENTS
The training of the CNN, as well as the experiments
detailed in this section have been carried out with a
PC with a CPU Intel Core i7-7700
R
at 3.6 GHz.
Moreover, the training of the CNN was tackled with
a GPU NVIDIA GEFORCE GTX 1080TI
R
. This
paper presents two experiments. Additionally, the
datasets presented in the subsection 2.1 were used to
carry out the training of the CNN, the mapping task
and later evaluation of the localization method pro-
posed.
Throughout the experiments tackled to evaluate
the goodness of the localization methods, two param-
eters are considered to check the accuracy and effi-
ciency: (1) the average localization error, which mea-
sures the Euclidean distance between the position es-
timated and the real position where the test image was
captured (obtained by the ground truth); and (2) the
average computing time required to estimate the po-
sition of the test image.
4.1 Experiment 1: Comparison between
Localization Methods
This subsection presents the results obtained with
the proposed localization algorithm, which uses the
global-appearance descriptors obtained from different
layers of the trained CNN. Moreover, these results
are also compared with other global-appearance de-
scription methods based on classical analytic meth-
ods, whose configuration is selected from previous
works (Cebollada et al., 2019). The results obtained
through the use of analytic descriptors (HOG and
gist) and the descriptors based on deep learning are
shown in the table 2. This table shows the size of
the descriptor, the average localization error (cm) and
the average computing time to estimate the position
of the test images (ms). Regarding the localization
error, the descriptor obtained from the layer conv
4
presents the minimum value, followed by the descrip-
tors from the layers conv
5
and f c
6
. As for the com-
puting time, the fastest option is also achieved with
the conv
4
layer, since the data obtained for this layer
are calculated in a very early stage of the CNN ar-
chitecture and the holistic descriptor calculated from
this layer has a relatively small size. In general, the
values obtained through using the CNN trained with
the Freiburg training dataset to obtain the holistic de-
scriptors improves the localization task in comparison
to the descriptors calculated by analytical methods.
Considering the localization error and the computing
time measured, either layers conv
4
, conv
5
, f c
6
or f c
7
can be considered to carry out this task. Nevertheless,
despite f c
8
outputs good computing time, the local-
ization error obtained is quite worse comparing to the
rest of layers. The information provided by this de-
scriptor with 9 components allows fast computations
but the information provided is not enough to charac-
terize the main information of the images.
4.2 Experiment 2: Hierarchical
Localization
As it was explained in section 3, the hierarchical lo-
calization consists in solving the localization task in
A Deep Learning Tool to Solve Localization in Mobile Autonomous Robotics
237

⃗
CNN Classifier
The descriptors in the
room
are considered
Descriptors in
Distance calculation
= (
⃗
,
⃗
,
)
= 1,…,
,1
·
·
·
,
(
,1
,
,1
)
⃗
,1
(
,
,
,
)
⃗
,
K = arg min( ⃗
)
=
,
=
,
⃗
= {
1
, … ,
}
Most likely
room
Figure 4: Hierarchical localization diagram. After capturing a test image im
test
, it is introduced into the CNN and the most
likely room is estimated c
i
. At the same time, the holistic descriptor
#»
d
test
is obtained from one of the layers and a nearest
neighbour search is done with the descriptors from the training dataset included in the room predicted. The most similar
descriptor (the one which produces the minimum distance with
#»
d
test
) is retained. The position of im
test
is estimated as the
position where im
c
i
,k
was captured.
Table 2: Conventional localization results obtained through the use of the holistic descriptors obtained from the Freiburg CNN
and through the use of gist and HOG description methods. The table shows the size of descriptor, the average localization
error and the average computing time.
Descriptor Size Avg. Error (cm) Avg. Computing time (ms)
Layers from
Freiburg CNN
conv
4
180 5.07 ± 0.17 6.7
conv
5
180 5.09 ± 0.17 7.7
f c
6
4096 5.09 ± 0.17 44.55
f c
7
4096 5.14 ± 0.18 46.26
f c
8
9 16.60 ± 29.72 7.52
Analytical
methods
gist 128 5.19 ± 0.18 10.75
HOG 64 16.34 ± 0.78 45.02
several steps. The hierarchical localization proposed
through this work is based on two steps: a rough and
a fine localization. As for the rough localization step,
an evaluation of the trained CNN is carried out. To
train the network, the performance basically consists
in using the pre-trained CNN together with the aug-
mented dataset by following training options. The ob-
tained CNN is evaluated with the cloudy test dataset
by introducing these images into the network and ob-
taining the percentage of accuracy acc
%
, which is cal-
culated as acc
%
= (N
ok
/N
test
) × 100, where N
ok
is
the number of images whose room is correctly pre-
dicted and N
test
is the total number of images that
compose the cloudy test dataset. Through this evalu-
ation, the accuracy obtained is 98.71%. Additionally,
the fig. 5 shows the confusion matrix obtained. From
it, we can observe that few wrong predictions are pro-
duced. Furthermore, all these mistakes are produced
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
238
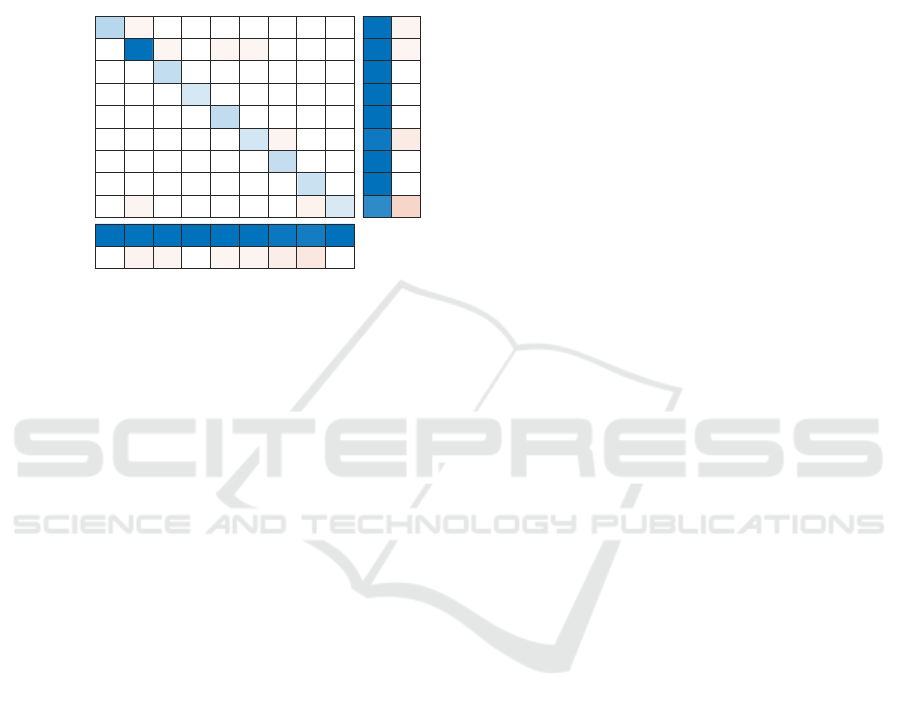
with wrong rooms which are adjacent to the correct
one. For instance, in the case of the images that be-
long to the stairs area and were wrongly classified, the
mistaken rooms were the bathroom and the corridor,
which are contiguous to the correct room. Therefore,
the conclusion is that the trained CNN is ready to pre-
dict in which room the input image was captured.
1. Printer area
2. Corridor
3. Kitchen
4. Large office
5. 2-P office 1
6. 2-P office 2
7. 1-P office
8. Bathroom
9. Stairs area
Predicted Class
1. Printer area
2. Corridor
3. Kitchen
4. Large office
5. 2-P office 1
6. 2-P office 2
7. 1-P office
8. Bathroom
9. Stairs area
True Class
Confusion matrix
282 3
11
2
229
132
1
233
1
148 10
218
190
18 122
1178
3
4
10
29
282
1178
229
132
233
148
218
190
122
14 2 1 1 10 18
282 1178 229 132 233 148 218 190 122
Figure 5: Confusion matrix obtained after solving the first
step of the hierarchical localization (room classification)
with all the test images, with the trained CNN.
Regarding the fine localization step, it consists in
finding the nearest neighbour by comparing the holis-
tic descriptor obtained from a layer of the CNN and
the descriptors of the trained dataset included in the
predicted room. This experiment has evaluated the ef-
ficiency of the five holistic descriptors obtained from
the different CNN layers by means of measuring the
average error and the average computing time cal-
culated according to the process described in fig. 4
to carry out the localization task. Moreover, with
the aim of comparing the results obtained through
the proposed method with other hierarchical local-
ization methods, this experiment also establishes a
comparison between the proposed method (rough step
with CNN and fine step with nearest neighbour) and
the methods evaluated in previous works (Cebollada
et al., 2019) (rough and fine steps solved by nearest
neighbour). For these methods of previous works, the
global-appearance descriptors used are the descriptor
gist and the descriptor obtained from the layer f c
6
of the AlexNet; and the high-level map is composed
by 10 representatives which were selected by using a
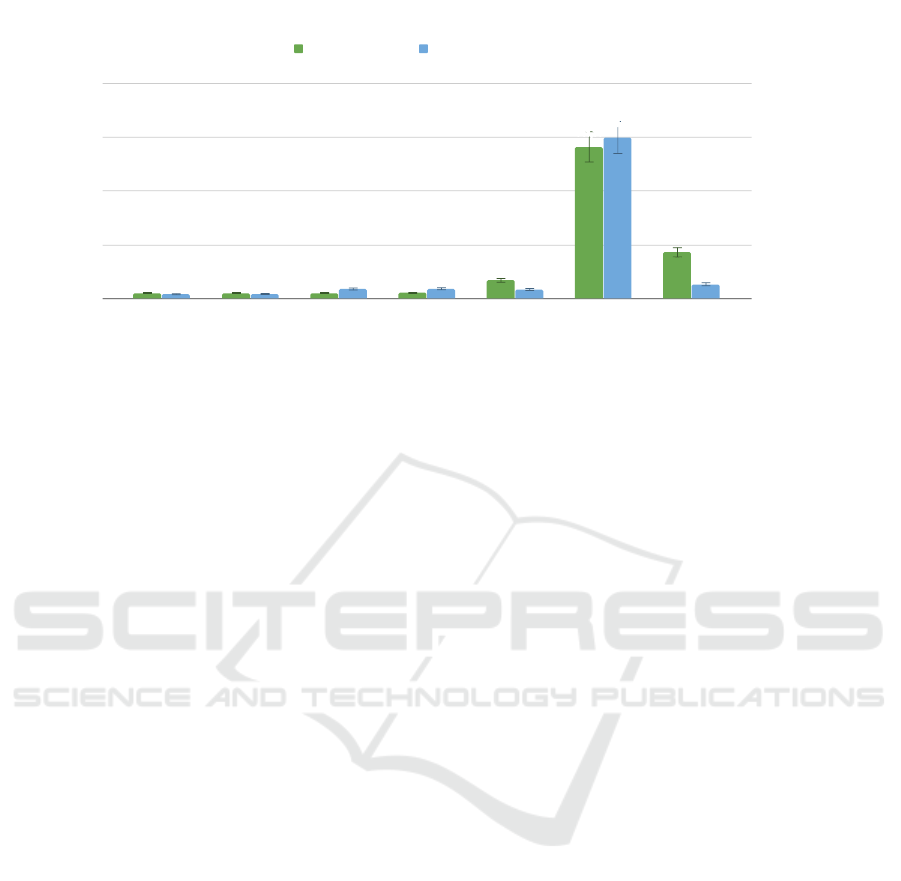
spectral clustering algorithm. Fig. 6 shows the results
obtained through using the method proposed with the
different descriptors from the CNN layers and also the
results obtained by the methods proposed in previous
works.
Regarding the different methods evaluated to
carry out the hierarchical localization, this experiment
shows that the method proposed performs substan-
tially better than alternative methods previously pro-
posed. Fig. 6 shows that the five description meth-
ods based on the Freiburg CNN present more accu-
racy regarding localization error and also the time
required to solve this task is lower than the meth-
ods based solely on the nearest neighbour. Among
the five holistic descriptors obtained from the CNN,
conv
4
and conv
5
output the best solutions since their
localization error as well as their computing time is
lower than the obtained through the fully connected
layers. These results match the previous conclusion
reached in (Cebollada et al., 2019) about the use of
2D convolutional layers to obtain holistic descriptors.
As for the results obtained by conventional and
hierarchical localization methods, the conclusion ob-
tained after comparing the results of the table 2 and
the fig. 6 is that the hierarchical localization method
introduces a faster performance, but it also produces
an increase of the localization error. This is due to
the fact that the CNN allows a faster rough localiza-
tion step, but this network produces a small number of
wrong room predictions that have a negative influence
on the average localization error.
5 CONCLUSIONS
In this work, a study is tackled regarding the use of
deep learning to build hierarchical topological mod-
els for localization. We also evaluate the ability of the
proposed deep learning tool to create holistic descrip-
tors to solve the localization problem based on near-
est neighbour. Regarding the hierarchical localization
method proposed, this consists in creating a convolu-
tional neural network for classification. This classi-
fier is not only used in the rough localization step to
predict the correct room where a test image was cap-
tured, but it is also used to obtain a holistic descrip-
tor which characterizes the image. For this work, five
layers have been evaluated: conv
4
, conv
5
, f c
6
and f c
7
and f c
8
. The training and evaluation of all the local-
ization and description methods have been carried out
with a panoramic images dataset which contains real
conditions effects such as changes in the position of
furniture, people walking, blur effect, etc.
As for the use of this CNN to produce global-
appearance descriptors for solving the conventional
localization by means of a nearest neighbour method,
the five descriptors extracted from different layers of
the CNN are evaluated together with other analytic
holistic methods commonly used for these purposes.
The results obtained show that the proposed methods
A Deep Learning Tool to Solve Localization in Mobile Autonomous Robotics
239
5,22 5,22
5,23
5,28
16,96
141,11
43,04
8,20
8,62
17,84
18,23
16,96
299,54
26,70
Hierarchical Localization Method
Avg. error (cm)
Avg. Computing time (ms)
0
50
100
150
200
0,00
100,00
200,00
300,00
400,00
Proposed
method (conv4)
Proposed
method (conv5)
Proposed
method (fc6)
Proposed
method (fc7)
Proposed
method (fc8)
Nearest
neighbour (gist
descriptor)
Nearest
neighbour (fc6-
AlexNet
descriptor)
Avg. error (cm) Avg. Computing time (ms)
Hierarchical Localization Comparison
Figure 6: Hierarchical localization methods. Nearest neighbour with either gist descriptor or the layer f c
6
of AlexNet and
the proposed method based on retrieving the room from the Freiburg CNN and after, solving the fine localization by nearest
neighbour with the descriptor obtained from either the layers conv
4
, conv
5
, f c
6
and f c
7
or f c
8
of the CNN
are more robust, since they output lower localization
error and computing time than the results obtained by
analytic methods (gist and HOG).
Regarding the hierarchical localization proposed
in this work, this has been compared with a method
based on obtaining the nearest neighbour through dif-
ferent levels of the model. Prior to this comparison,
through the fig. 5, we have showed the accuracy of the
trained CNN to estimate the correct room within the
environment evaluated. As for the whole localization
process, this work shows the evaluation of both meth-
ods by using different global-appearance description
methods. The method proposed in this paper has
proved to be more efficient, since its computing time
and localization error are lower than the obtained by
means of the nearest neighbour method.
Among the five holistic descriptors obtained from
the trained CNN, the descriptor from the layer f c
8
can
be discarded, because this descriptor does not charac-
terize properly enough the images for the proposed
tasks. The descriptors related to the conv
4
and conv
5
layers have produced the optimal localization solu-
tions among all the methods evaluated, since the size
of the descriptor is relatively small and it leads to low
computing time. Despite their size, their localization
results are also the most accurate. They produce an
average error around 5 cm departing from a training
dataset whose average distance between adjacent im-
ages is around 20 cm.
In future works, we will spread the evaluation
in order to evaluate the goodness of the proposed
methods under changes of illumination. Furthermore,
we will check whether this CNN is useful to ob-
tain global-appearance descriptors in similar environ-
ments. We will also consider other newer and more
complex CNN architectures such as ResNet or VGG
Net. Last, we would also like to create and evaluate
a CNN based directly on omnidirectional images in-
stead of panoramic.
ACKNOWLEDGEMENTS
This work has been supported by the General-
itat Valenciana and the FSE through the grants
ACIF/2017/146 and ACIF/2018/224, by the Span-
ish government through the project DPI 2016-78361-
R (AEI/FEDER, UE): “Creaci
´
on de mapas medi-
ante m
´
etodos de apariencia visual para la navegaci
´
on
de robots.” and by Generalitat Valenciana through
the project AICO/2019/031: “Creaci
´
on de modelos
jer
´
arquicos y localizaci
´
on robusta de robots m
´
oviles
en entornos sociales”.
The authors declare that there are no competing inter-
ests regarding the publication of this paper.
REFERENCES
Abadi, M. H. B., Oskoei, M. A., and Fakharian, A. (2015).
Mobile robot navigation using sonar vision algorithm
applied to omnidirectional vision. In 2015 AI &
Robotics (IRANOPEN), pages 1–6. IEEE.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
240

Bengio, Y., Courville, A., and Vincent, P. (2013). Represen-
tation learning: A review and new perspectives. IEEE
transactions on pattern analysis and machine intelli-
gence, 35(8):1798–1828.
Cebollada, S., Pay
´
a, L., Mayol, W., and Reinoso, O. (2019).
Evaluation of clustering methods in compression of
topological models and visual place recognition us-
ing global appearance descriptors. Applied Sciences,
9(3):377.
Cebollada, S., Pay
´
a, L., Rom
´
an, V., and Reinoso, O. (2019).
Hierarchical localization in topological models under
varying illumination using holistic visual descriptors.
IEEE Access, 7:49580–49595.
Cebollada, S., Pay
´
a, L., Valiente, D., Jiang, X., and
Reinoso, O. (2019). An evaluation between global
appearance descriptors based on analytic methods
and deep learning techniques for localization in au-
tonomous mobile robots. In ICINCO 2019, 16th In-
ternational Conference on Informatics in Control, Au-
tomation and Robotics (Prague, Czech Republic, 29-
31 July, 2019), pages 284–291. Ed. INSTICC.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition, San Diego, USA. Vol. II, pp. 886-893.
Do, H. N., Choi, J., Young Lim, C., and Maiti, T. (2018).
Appearance-based localization of mobile robots using
group lasso regression. Journal of Dynamic Systems,
Measurement, and Control, 140(9).
Dymczyk, M., Gilitschenski, I., Nieto, J., Lynen, S., Zeisl,
B., and Siegwart, R. (2018). Landmarkboost: Effi-
cient visualcontext classifiers for robust localization.
In 2018 IEEE/RSJ International Conference on Intel-
ligent Robots and Systems (IROS), pages 677–684.
Guo, J. and Gould, S. (2015). Deep cnn ensemble with
data augmentation for object detection. arXiv preprint
arXiv:1506.07224.
Han, D., Liu, Q., and Fan, W. (2018). A new image clas-
sification method using cnn transfer learning and web
data augmentation. Expert Systems with Applications,
95:43–56.
Korrapati, H. and Mezouar, Y. (2017). Multi-resolution
map building and loop closure with omnidirectional
images. Autonomous Robots, 41(4):967–987.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. In Advances in neural information process-
ing systems, pages 1097–1105.
Lenz, I., Lee, H., and Saxena, A. (2015). Deep learning for
detecting robotic grasps. The International Journal of
Robotics Research, 34(4-5):705–724.
Liu, R., Zhang, J., Yin, K., Pan, Z., Lin, R., and Chen, S.
(2018). Absolute orientation and localization estima-
tion from an omnidirectional image. In Pacific Rim
International Conference on Artificial Intelligence,
pages 309–316. Springer.
Mancini, M., Bul
`
o, S. R., Ricci, E., and Caputo, B. (2017).
Learning deep nbnn representations for robust place
categorization. IEEE Robotics and Automation Let-
ters, 2(3):1794–1801.
Meattini, R., Benatti, S., Scarcia, U., De Gregorio, D.,
Benini, L., and Melchiorri, C. (2018). An semg-based
human–robot interface for robotic hands using ma-
chine learning and synergies. IEEE Transactions on
Components, Packaging and Manufacturing Technol-
ogy, 8(7):1149–1158.
Oliva, A. and Torralba, A. (2006). Building the gist of as-
cene: the role of global image features in recognition.
In Progress in Brain Reasearch: Special Issue on Vi-
sual Perception.Vol. 155.
Pak, M. and Kim, S. (2017). A review of deep learning in
image recognition. In 2017 4th international confer-
ence on computer applications and information pro-
cessing technology (CAIPT), pages 1–3. IEEE.
Pay
´
a, L., Gil, A., and Reinoso, O. (2017). A state-of-the-art
review on mapping and localization of mobile robots
using omnidirectional vision sensors. Journal of Sen-
sors, 2017.
Pay
´
a, L., Peidr
´
o, A., Amor
´
os, F., Valiente, D., and Reinoso,
O. (2018). Modeling environments hierarchically with
omnidirectional imaging and global-appearance de-
scriptors. Remote Sensing, 10(4):522.
Pronobis, A. and Caputo, B. (2009). COLD: COsy Lo-
calization Database. The International Journal of
Robotics Research (IJRR), 28(5):588–594.
Pronobis, A. and Jensfelt, P. (2011). Hierarchical multi-
modal place categorization. In ECMR, pages 159–
164.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.,
Anguelov, D., Erhan, D., Vanhoucke, V., and Rabi-
novich, A. (2015). Going deeper with convolutions.
In Proceedings of the IEEE conference on computer
vision and pattern recognition, pages 1–9.
Ullah, M. M., Pronobis, A., Caputo, B., Luo, J., and Jens-
felt, P. (2007). The cold database. Technical report,
Idiap.
Wozniak, P., Afrisal, H., Esparza, R. G., and Kwolek, B.
(2018). Scene recognition for indoor localization of
mobile robots using deep cnn. In International Con-
ference on Computer Vision and Graphics, pages 137–
147. Springer.
Zhou, B., Lapedriza, A., Xiao, J., Torralba, A., and Oliva,
A. (2014). Learning deep features for scene recog-
nition using places database. In Advances in neural
information processing systems, pages 487–495.
Zhu, Y., Mottaghi, R., Kolve, E., Lim, J. J., Gupta, A., Fei-
Fei, L., and Farhadi, A. (2017). Target-driven visual
navigation in indoor scenes using deep reinforcement
learning. In 2017 IEEE International Conference on
Robotics and Automation (ICRA), pages 3357–3364.
A Deep Learning Tool to Solve Localization in Mobile Autonomous Robotics
241
