
Fuzzy Gradient Control of Electric Vehicles at Blended Braking with
Volatile Driving Conditions
Valery Vodovozov
1a
, Eduard Petlenkov
2b
, Andrei Aksjonov
3c
and Zoja Raud
1d
1
Department of Electrical Power Engineering and Mechatronics, Tallinn University of Technology,
Ehitajate tee 5, Tallinn, Estonia
2
Department of Computer Systems: Centre for Intelligent Systems, Tallinn University of Technology,
Ehitajate tee 5, Tallinn, Estonia
3
School of Electrical Engineering, Intelligent Robotics Group, Aalto University, Espoo, Finland
Keywords: Electric Vehicle, Intelligent Transportation, Fuzzy Control, Modelling, Simulation, Energy Recovery,
Hybrid Energy Source, Braking System.
Abstract: The paper is devoted to intelligent control of road electric vehicles aiming at reducing energy losses caused
by traffic jams, changing velocity, and frequent start-stop modes of driving. A blended braking system is
described that integrates both the friction and the electric braking strengths in volatile driving conditions,
including gradual and emergency antilock braking. The vehicle model reflects multiple factors, such as air
resistance, road slope, and variable friction factor. A new gradient control method recognizes unstable tire
properties on changing road surfaces at different velocities. In the motor and battery model, the state of charge
and electric current/voltage restrictions of the hybrid energy storage are taken into account. The braking torque,
actuated by the Mamdani’s fuzzy logic controller established in the Simulink
®
environment, is allocated
between the front and rear friction and electric brakes. Comparison of simulation and experimental results
confirms that the outcomes of this research can be considered in the design of braking systems for electric
vehicles with superior energy recovery.
1 INTRODUCTION
In development of control systems for road electric
vehicles, many novel energy saving trends are
discovered nowadays. In view of the fact that up to
50 – 70% of vehicle energy is lost during deceleration
(Shang et al., 2010; Savaresi et al., 2010), the braking
energy recovery might reclaim this loss and extend
driving range and time. Thereby, the introduction of
modern blended braking systems has become a top
priority and moves forward intensively in recent
years. Such systems combine traditional friction
braking (FB) with regenerative electric braking (EB)
associated with hybrid energy storage machinery that
unites both high energy density modules (batteries)
and high power density blocks (ultracapacitors or/and
flywheels) (Naseri et al., 2017). Blended braking has
a
https://orcid.org/ 0000-0002-5530-3813
b
https://orcid.org/ 0000-0003-2167-6280
c
https://orcid.org/ 0000-0001-7460-6548
d
https://orcid.org/ 0000-0001-5197-3599
attracted attention in science and industry because of
reduced car maintenance costs and lowered tire
particles emission, among others.
Most electric vehicle designers, such as (Chen et
al., 2017; Xie and Wang 2018), prefers EB for vehicle
gradual slowing down and FB for intensive
deceleration. EB is commonly out of use in the
antilock braking system (ABS) and is not applied as
an urgent braking tool because the force generated by
an electric motor is often quite small to produce the
total braking torque needed to ensure a quick and
steerable stop. Primarily, the EB fails due to battery
overheating and the state-of-charge (SOC)
restrictions of the energy storage.
When discussing the distribution of braking
torque in blended braking systems, three approaches
fall to the focus of attention: force assignment
250
Vodovozov, V., Petlenkov, E., Aksjonov, A. and Raud, Z.
Fuzzy Gradient Control of Electric Vehicles at Blended Braking with Volatile Driving Conditions.
DOI: 10.5220/0009777602500261
In Proceedings of the 17th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2020), pages 250-261
ISBN: 978-989-758-442-8
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

between right and left wheels, power sharing among
front and rear wheels, and torque allocation between
EB and FB systems (Xu et al., 2016). The last issue is
aimed at acquiring maximal braking energy from both
EB and FB ensuring highest regeneration capacity
and involving the EB to energy exchange in the best
possible way (Xie and Wang, 2018). At that, the ABS
occupies a special place and usually represents a
separate part of the vehicle, since its primary target is
to reduce the braking distance and time.
Usually, ABS performs poorly in volatile and
unknown road conditions because of its focus on
high-speed driving on straight dry roads. As a result,
when rain, snow, or loose gravel appears, ABS can
lengthen the braking distance and braking time
instead of shortening them due to improper control
organisation. To resolve the problem, intelligent
ABSs with slip adjustment were proposed (Naseri et
al., 2017; Chen et al., 2017).
For the systems that have non-linear and time
variant plants with significant dead time, multiple
fuzzy control approaches were published recently.
Thanks to such universal approximator as a fuzzy
logic controller (FLC), the most progressive of them,
for instance (Givigi, 2010; Haidegger, 2011),
successfully evaluate a priori unknown changes in the
environment over time in order to understand the
process and to find a solution of the dynamic
differential or difference equations. In (Radgolchin,
2018), a fuzzy controller is designed to stabilize a
moving plant at unknown deflections. The efficiency
of this FLC is enhanced using a second level
supervisory controller. The fuzzy algorithm proposed
in (Precup, 2014) computes the control signal vector
applied to the chaotic continuous-time dynamical
system to ensure its stabilization.
In (Lin and Song, 2011), changes in the properties
of tires, road surfaces, and vehicle deceleration can be
estimated taking into account the displacement and
rate of the brake pedal pressing, vehicle velocity, and
wheel slip as the FLC input signals. Nevertheless, this
specifity eliminates the use of EB in the ABS and
separates the ABS from the general braking system.
As a rule, while the braking intensity demand is small,
EB is elected, but as the ABS is requested, FB is
applied (Jing et al., 2011).
Just like in the initial part of this research
published in (Aksjonov et al., 2018; Aksjonov et al.,
2019), the current study is devoted to creating a
hybrid energy-storage-oriented blended braking
system suitable for different braking modes on
various road surfaces and velocities. However, new
factors are taken into account here aiming at
improving the efficiency of energy recovery and the
versality of the system. First, thanks to the torque
gradient control, the available range of volatile
driving conditions is expanded without losing the
quality of braking. Second, in addition to ABS, the
offered braking system can operate in both gradual
and emergency braking modes. Third, in contrast to
many known ABS, the quality of braking in this study
does not depend on the initial vehicle velocity, air
resistance, or road incline.
The problem of braking management is
formulated as a search among three actions: urgent
braking with fuzzy ABS control upon maximally
possible EB involvement; gradual braking with
greatest energy recovery; or non-electric braking. The
research objective is to achieve the best energy
recovery in the first two scenarios with minimal
participation of the third one. The following five
sections present the new braking system with gradient
control, the vehicle friction model, the motor-battery
model, and their operation. Then, the versatile
braking FLC is designed. Next, the simulation is
performed, the experimental diagrams are compared
to the simulation outcomes, and the results obtained
are summarized.
2 MODEL OF BRAKING SYSTEM
In compliance with (Reif, 2014; Kiyakli and Solmaz,
2018), dynamics of the braking single-wheel quarter-
vehicle are determined as follows:
B
Fma
, (1)
F
B
= F
air
+F
g
+F
x
, (2)
windvwindvairair
vvvvQCF sgnρ5.0
2
, (3)
βsinmgF
g
,
(4)
β cos μ mgF
x
, (5)
dt
d
JrFT
w
BB
ω
, (6)
where
m – quarter-vehicle mass;
a – longitudinal deceleration of vehicle;
F
B
– braking force;
F
air
– air resistance (aerodynamic drag);
ρ – air density;
C
air
– aerodynamic drag coefficient;
Q – vehicle front area;
v
v
= – vehicle velocity;
v
wind
– wind velocity;
Fuzzy Gradient Control of Electric Vehicles at Blended Braking with Volatile Driving Conditions
251

F
g
– climbing force;
g – acceleration due to gravity;
β – climbing slope (road incline);
F
x
– longitudinal force;
μ – dimensionless friction factor;
T
B
– braking torque;
r – effective radius of the wheel;
ω
w
– angular speed of the wheel;
J – moment of inertia of the wheel.
Two variants of the explored Simulink
®
model of
blended braking with fuzzy gradient control are
shown in Fig. 1: the friction-slip system (a) and the
torque-slip system (b). They are made up of the
following groups of blocks:
• Vehicle friction group including Tire-road, Slip,
and Vehicle blocks;
• Drive group, including electric drive (eDrive),
friction drive (fDrive), Wheel, and Energy blocks;
• Control group, including the fuzzy logic
controller (FLC) and torque allocation (TA)
blocks. The FLC derives an actuating braking
torque T
*
for vehicle deceleration using the
velocity and tire-road (a) or application torque (b)
gradient signals.
(a)
(b)
Figure 1: Simulink
®
models of the blended braking system
with friction-slip (a) and torque-slip (b) gradient control.
3 WHEEL SLIP AND TIRE-ROAD
FRICTION ESTIMATES
To slow down the vehicle moving at certain initial
velocity v
0
, the required braking force F
B
has to be
developed. To this aim, the control system needs the
data used in Eqs. (1) – (6). Most of them are available
from the vehicle passport characteristics (m, Q, r, J)
or can be acquired with on-board sensors (a, v
v
,
v
wind
, ω
w
).
However, estimating the total tire-road friction is
a complex challenge since this parameter varies with
such factors as velocity, load, torque, surface
roughness, tire diameter, inflation, wear, etc., and
these variations are very difficult to detect. Moreover,
the friction depends on the wheel slip.
Unlike the graduate braking, in intensive braking
a longitudinal wheel slip λ takes place (Reif, 2014;
Spichartz et al., 2017) i.e. the relative difference
between vehicle (v
v
) and wheel (v
w
) velocities:
v
wv
v
wv
v
rv
v
vv ω
λ
. (7)
This means that in addition to minor rolling
friction, slipping friction heavily affects the braking
rate. It involves both the kinetic interaction of moving
surfaces, called sliding or dynamic friction, and the
static coupling (“stiction”) of fixed surfaces. The
latter one significantly exceeds its kinetic counterpart
at the beginning of starting and at the end of braking.
The force that prevents a tire from slipping as it rolls
on the ground is an example of static friction. Even
though the wheel is in motion, the patch of the tire
that contacts the ground is stationary relative to the
ground, so it is a static rather than a kinetic fraction
(Pratap and Ruina, 2002).
To derive the wheel slip in real time, both
velocities in Eq. (7) can be directly measured with on-
board v
v
and ω
w
sensors. However, since the friction
cannot be acquired by sensors, one or the other
computational method is required for its estimation.
The knowledge of the friction-slip characteristics
v
v,λμ
is needed not only to ensure the anti-spin
regulation and antilock braking, but also, for adaptive
cruise control and energy recovery. As direct friction
sensing is impossible, many studies devoted to its
indirect estimation have been produced aiming to
arrange the braking procedure. In all cases, some
forms of the model-based approach are used for
v
v,λμ
searching. In (Zhang and Lin 2018), friction
is derived based on velocity sensor signals and
vehicle geometry. In (Kadowaki et al., 2007), a
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
252

perturbed sliding mode observer is used. Several
models of the friction-slip relations may be found in
literature, such as Pacejka’s “Magic Formula”,
Burckhardt model, Rill model, and others (Cecotti,
2012).
Although the factors in these models are different,
the trends of curves look very similar. Commonly, the
tire-road friction factor grows steeply from zero to its
maximum appeared somewhere between 2 and 12%
slip for different road surfaces. At 0% slip, both the
wheel and the vehicle have exactly the same
velocities in Eq. (7). Gradual braking operations
presume low levels of slip and take place within a
zone where an increase in the slip simultaneously
produces an increase in the usable friction. These
growing slopes of the friction-slip characteristics
match the stable zone where, due to the positive
friction-slip gradient, the vehicle is suitable for
control and for steerability maintenance. On the
contrary, the falling slopes emphasise an unstable
zone, in which the wheels may lock up, inducing
skidding and causing the spinning of the tires. When
the slip is 100%, the wheel is locked although the
vehicle is still moving.
In this research, a programmable road estimator
was implemented in the Tire-road block shown in
Fig. 1, where a preliminary stored set of friction-slip
lookup tables is used. Its input is associated with the
Slip block and vehicle deceleration a is derived from
the ratio of the longitudinal (F
x
) and normal (F
z
)
forces acting on the wheel:
β cos
,λμ
mg
FFma
F
F
v
gair
z
x
v
. (8)
Further, vehicle velocity is counted by integrating
a as shown in Fig. 2, where it is assumed that F
air
= β
= 0 with a view to simplicity.
Figure 2: The Vehicle block.
Naturally, given the very large uncertainty
associated with the above estimates due to incomplete
data, this approach does not claim to be highly
accurate. As the velocity decreases, the curves tend to
move down and right, meaning that the dynamics of
the wheel slip is inversely proportional to the vehicle
velocity (Habibi and Yazdizadeh, 2010; Cerdeira-
Corujo et al., 2016; Li et al., 2018). Additionally, such
tire properties as their type, inflating pressure, etc.
also change during braking, affecting their peak
locations. An important challenge is to identify the
changing road surface in order to select the proper
v
v,λμ
characteristic.
4 GRADIENT CONTROL
METHOD
In contrast to (Aksjonov et al., 2018), where the
acceleration signal is sent directly to the controller, in
the new model presented in Fig. 1 this signal is only
needed to estimate the vehicle velocity in the Vehicle
block.
To reduce the uncertainty of the friction
characteristics, the steerable braking condition can be
confidently expressed as
0
λ
μ
d
d
. (9)
In accordance with Eq. (9), the fastest braking
process is expected at the maximal braking force F
B
corresponding to
0
λ
μ
d
d
.
In the model of Fig. 1-(a), the desired friction
factor and the measured slip ratio are used in the same
Tire-road block to determine how great force can be
created in response to an increase of wheel slip.
Estimation of Eq. (9) in real time is based on the
tire model Eq. (8). Two approaches are proposed to
overcome differentiation noise. In the first case, a
filtering technique (Cecotti et al., 2012) is adopted.
As the second method, pre-calculated friction
derivatives are collected in the lookup tables to be
used instead of real-time differentiation. The gradient
obtained by any of these approaches is further
directed to the control system.
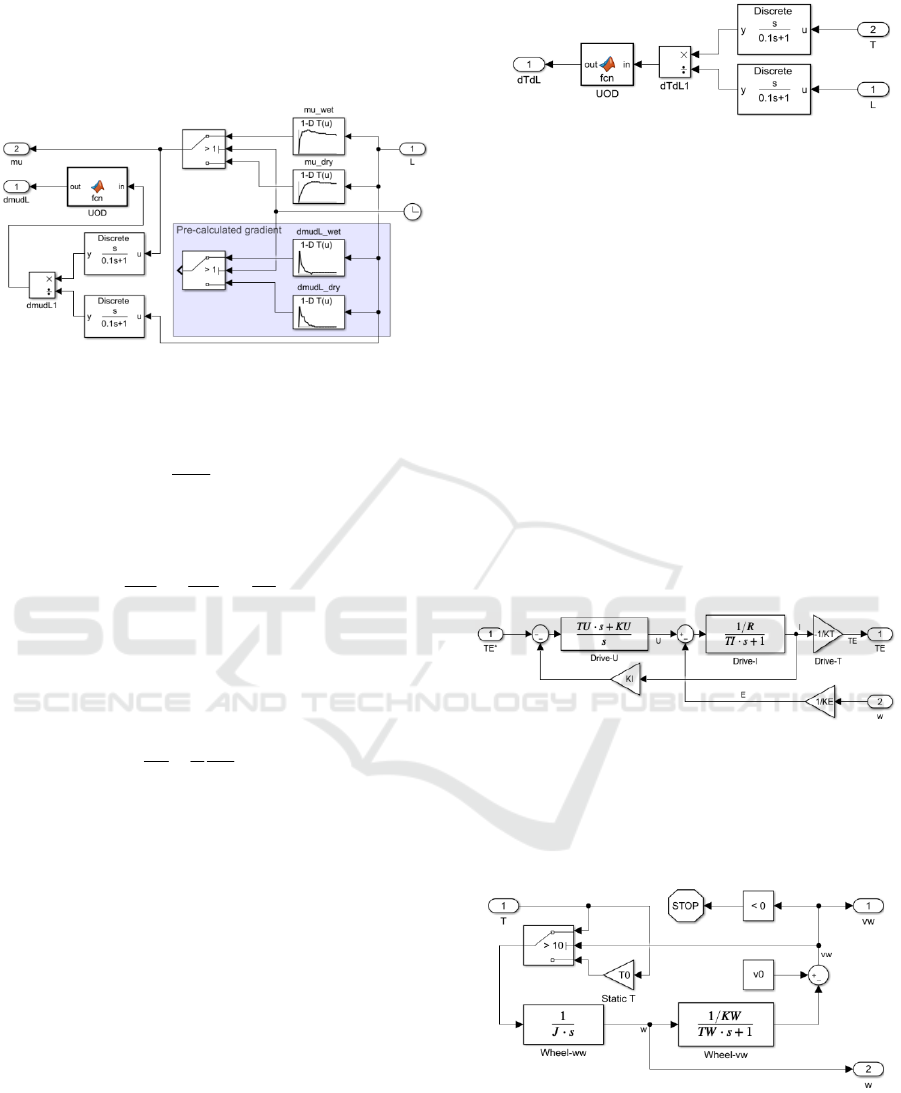
Both techniques are illustrated in Fig. 3, where
two lookup tables keep data on the friction-slip (mu-
L) relations on wet (mu_wet) and dry (mu_dry) roads,
and two other lookup tables (dmudL_wet and
dmudL_dry) keep data on the pre-calculated
gradients. The signals about the change of the road
surface connect the appropriate tables to the outputs
of the block. At that, the derivatives are restricted
according to the universe of discourse (UOD) of the
connected controller.
Management of braking using Eq. (9) is called
further a friction-slip gradient control. Since friction
cannot be sensed directly and this control approach
Fuzzy Gradient Control of Electric Vehicles at Blended Braking with Volatile Driving Conditions
253
remains fairly rough, the estimated tire-road friction
factor is to be taken with a margin relative to its
maximum. As a result, this system does not claim any
significant advantages over (Aksjonov et al., 2018).
Figure 3: The Tire-road block.
However, as a development of this approach, a
more advanced method is further proposed.
Assuming that
dt
d
J
w
ω
remains rather constant in
the controller computational interval, Eq. (6) can be
converted as
λ
μ
λλ d
d
k
d
dF
r
d
dT
xB
, (10)
where
βcosmgrk
.
In turn, since at the steerable braking the torque T
B
follows the application torque T of the drive, Eq. (9)
is re-written as follows:
0
λ
1
λ
μ
d
dT
kd
d
. (11)
Now, the derivative of application torque with
respect to slip may be used as a control feedback. It is
called further a torque-slip gradient control.
Whereas the application torque is easily measured
with sensors and accurately adjusted (Xu et al., 2016),
the torque-gradient control represents a kind of the
close loop control. In this way, vehicle velocity,
particularly at statics, as well as other road,
aerodynamics, and incline features are successfully
considered into the tire model as was recommended
in (Habibi and Yazdizadeh, 2010; Cecotti et al.,
2012).
The torque-slip gradient control is illustrated in
Fig. 1-(b) and Fig. 4, where the Gradient block
implements differentiation of measured application
torque T, whereas the Tire-road block is only needed
for estimating the friction using data from the Slip
block fed by the on-board v and ω
w
sensors.
Figure 4: The Gradient block.
5 DRIVE MODEL
In the Drive group, the friction drive fDrive block,
integrated with FB, and the adjustable electric drive
eDrive block, implemented the battery-regenerative
EB, handle separately their portions of the actuating
braking torque T
*
generated by the Control group.
The FB unit is modelled as a first order system
with dead time.
In turn, the Drive-U sub-block in eDrive (Fig. 5)
is responsible for direct torque control, electrical
power supply, and energy recovery. Together with the
Drive-I sub-block, it arranges a torque stabilisation
loop with PI current controller.
The Drive-T sub-block and the Wheel block
belong to the speed loop activated in gradual
deceleration and shorted in emergency braking.
Figure 5: The eDrive block.
Gear and vehicle inertia are represented by the
Wheel block also (Fig. 6). The static fraction of torque
is taken into account in this model when the velocity
drops to a low (v
home
) level.
Figure 6: The Wheel block.
The Energy block (Fig. 7) derives an electrical
fraction of the braking power
wEE
TP ω
(12)
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
254

and braking energy regenerated back to the supply
grid with efficiency η in a given time interval t:
dtPW
EE
η
(13)
Figure 7: The Energy block.
6 TORQUE ALLOCATION
The main mission of the blended braking system is to
slow down a vehicle under the action of the
application torque T, which should be as close as
possible to the driver’s setpoint T
B
*
(the block
TB_driver in Fig. 1), without exceeding peak
optimality for the road surface under the tires.
The Control group generates actuating braking
torque T
*
dependently of the pedal displacement T
B
*
and friction gradient dμ/dλ (Fig. 1-(a)) or application
torque gradient dT/dλ (Fig. 1-(b)). Its output torque
allocation block (TA) algorithmically distributes the
actuating braking torque T
*
between the front and rear
wheels in a fixed ratio (Tao et al., 2017) and allocates
it between FB and EB based on real-time SOC,
voltage, and permissible EB current. Electric current
I
E
recharges the energy storage device from the EB
while the pressure signal p
F
adjusts the FB. Braking
will complete when the driver releases the pedal or
the vehicle stops.
In order to forward to EB a maximal fraction of
the actuating torque T
*
, the electric drive has to
develop sufficient power, voltage, and current to
charge all energy storage devices:
max max max
max max max
max max max
,max
,max
,max
BATUCE
BATUCE
BATUCE
III
UUU
PPP
, (14)
where
P
UC max
, U
UC max
, I
UC max
, P
BAT max
, U
BAT max
, and
I
BAT max
are permissible power, voltage, and current of
the ultracapacitor (UC) and the battery (BAT),
respectively; P
E max
, U
E max
, and I
E max
– maximal
power, voltage, and current of the electric drive.
Meanwhile, in order to keep the battery and
ultracapacitor within their safe operating areas,
electric current I
E
and motor torque T
E
*
have to meet
the real-time storage restrictions, namely, SOC
UC
and
SOC
BAT
(Cerdeira-Corujo, 2016; Naseri et al., 2017):
ψ ψ, max
ψ
*
BATBATUCUC
EE
SOCISOCI
IT
(15)
where I
UC
and I
BAT
are estimated charging currents of
the ultracapacitor and battery and ψ is flux linkage of
the electric motor.
Once the actuating braking torque exceeds these
boundaries, the remaining part of it must be created
by the FB:
***
EF
TTT
. (16)
In (Aksjonov et al., 2019), an appropriate torque
allocation algorithm is proposed. There, when the
control system recognises the actuating torque
request T
*
, the EB is activated and either EB
UC
or
EB
BAT
runs. The FB torque does not appear until
either any of the SOC levels exceeds the allowed
overcharging barriers or the electric motor produces
maximal power. As soon as the motor torque becomes
insufficient, the system runs FB and EB together.
Only in the case when both SOC levels exceed their
boundaries, the solo FB is used due to the inability to
regenerate.
Therefore, the common trait of this strategy is to
include regeneration into all braking scenarios, even
during heavy braking with ABS, and to use the solo
FB only when the battery SOC and voltage levels are
saturated. The fewer such conditions appear, the less
braking energy is wasted and the longer the service
life of the FB.
7 DESIGN OF A FUZZY LOGIC
CONTROLLER
Depending on the solution chosen, the fuzzy (Tao et
al., 2017), PID (Cerdeira-Corujo et al., 2016; Kiyakli
and Solmaz, 2018), sliding (Kadowaki et al., 2007;
Habibi and Yazdizadeh, 2010), and some other
braking controllers compete in the market. Given the
complexity of the system and its nonlinearity, this
study is devoted to the FLC relying on the knowledge
and skills of professional experts.
The FLC target is to derive an actuating braking
torque T
*
needed for slowing down the vehicle inside
an acceptable friction-slip region. In the MISO-type
controller designed, two input numerical variables
(crisps) are used: the driver’s setpoint T
B
*
and either
the friction (dμ/dλ) or the application torque (dT/dλ)
derivative with respect to slip λ.
The Mamdani-style inference mechanism is
applied to transform every input crisp into a separate
fuzzy pair consisting of an element in UOD and an
Fuzzy Gradient Control of Electric Vehicles at Blended Braking with Volatile Driving Conditions
255

appropriate membership function (MF). The
estimated actuating torque T
*
is coming from the FLC
output. Using the weighted average defuzzification
method, this linguistic signal is then turned back to
the real-world output crisp.
The setpoint torque input T
B
*
, the gradient input
dT/dλ (or dμ/dλ), and the actuating torque T* output
have six MFs notated as Z (Zero), VS (Very Small),
S (Small), M (Middle), B (Big), and VB (Very Big).
In Fig. 8, the fuzzy sets for the linguistic variables
are represented. The MFs have a triangle shape
suitable for braking management and experts training.
Figure 8: MFs of control variables T
B
*, Gradient, and T*.
The inference engine with “If–Then” modus
ponens converts fuzzy input sets to the fuzzy output
set using the base of 36 rules shown in Table I.
Table 1: FLC Rule Base.
Gradient
dµ/dλ, dT/dλ
Output torque T* at input T
B
*
Z VS S M B VB
Z Z Z Z Z Z Z
VS Z VS VS VS VS VS
S Z VS S S S S
M Z VS S M M M
B Z VS S M B B
VB Z VS S M B VB
The input-output FLC surface is plotted in Fig. 9.
Figure 9: Input-output FLC surface.
8 EXPERIMENTATION
To validate the model described in the previous
sections, the simulations are compared further to
experimental results published in (Aksjonov et al.,
2019).
The hardware-in-the-loop electro-hydraulic
testbed from ZF TRW Automotive (Koblenz,
Germany) granted for experimentation by TU
Ilmenau (Germany) and driven by the vehicle-
oriented software IPG CarMaker
®
(Karlsruhe,
Germany) was used there. The detailed stand
specification is given in (Aksjonov et al., 2019). Its
tire-road model based on “Magic Formula” (Pacejka,
2012) was parameterized against the real sport utility
vehicle and represented as a table of friction-slip data
under the fixed load on the wheels and the most
common road surfaces (i.e., icy, wet, damp and dry).
The peaks of the friction curves for each road surface
are marked with dots in Fig. 10.
Figure 10: Tire-road friction factor plots for different road
surfaces used in this study.
The weight of the studied sport utility vehicle is
2117 kg and wheel radius is 0.2 m. It was assumed
that the vehicle is moving in a straight-line
manoeuvre at 100 km/h, fed by the switch-reluctance
motor with a maximal permissible torque of 200 Nm,
speed 157 rad/s, and 2.1 kgm
2
inertia, connected to
the wheel imitator through the gear of 10.5 ratio. Due
to this transmission, the peak torque on the wheel at
heavy braking can approach 2000 Nm, and the
angular speed of the wheel – 15 rad/s. Aerodynamic
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
256
and climbing factors were neglected in that study
(F
air
= β = 0).
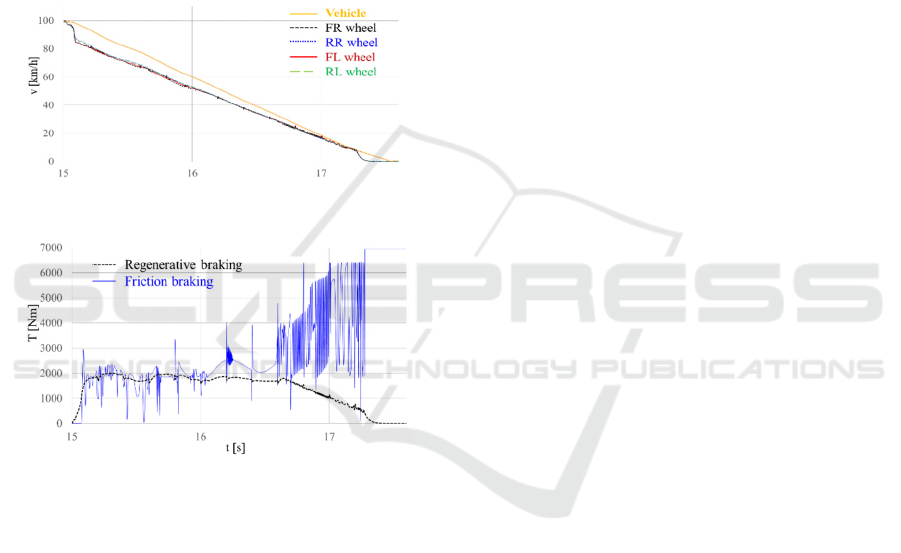
In Fig. 11, the braking diagrams obtained in
(Aksjonov et al., 2018) and confirmed experimentally
in (Aksjonov et al., 2019) are shown. They
demonstrate the velocities of the front left (FL), front
right (FR), rear left (RL), and rear right (RR) wheels,
appropriately, that follow the vehicle longitudinal
velocity in Fig. 11-(a), and EB and FB wheel torque
curves in Fig. 11-(b). Since the EB torque is not
sufficient to retain optimal slip, the control system
requests additional FB torque. At the end of slowing
down, regeneration turns off, and the FB completes
braking alone.
(a)
(b)
Figure 11: Experimental braking diagrams: (a) vehicle and
wheel velocities; (b) torque.
An original method was proposed in (Aksjonov et
al., 2018) for determining the road surface. Every
second, starting from ABS activation, the controller
evaluates the maximal deceleration of the vehicle and
compares it with the deceleration peaks preliminary
calculated using Eq. (8) at F
air
= β = 0. Such
momentary friction reset does not affect driving
comfort, as the process is very rapid, but it indicates
whether the road surface changes or remains the same
as before.
Alongside the set of positive outcomes, the
neglect of air friction, road slope, and other tire
features are the drawbacks of the above method. As
well, an evident chattering phenomenon at low
velocity is seen in the torque plots. In fact, its
appearance can be explained by three interrelated
reasons. First, this is an increase in static friction in
Eq. (5), when the vehicle is moving slowly and
several wheels tends to slip. Second, this is due to
high sensitivity of the slip to the velocity at slow
motion. Third, since at low velocity the EB ceases and
the FB finalises braking alone, there is no torque
stabilisation at that moment.
Torque oscillations demonstrate that the
simplified drive model used could not ensure proper
torque adjustment. Such kind of oscillation, reported
also by other researchers (Habibi and Yazdizadeh,
2010; Lin and Song, 2011; Li et al., 2018) is a
common issue of braking, needed to be considered as
it affects vehicle steerability and reduces energy
recovery.
9 COMPARING SIMULATIONS
TO EXPERIMENTAL RESULTS
The torque gradient approach proposed in the current
research brings sensitive benefits in braking
performance. Now, thanks to the close loop torque
control, there is no longer need to collect theoretical
tire-road friction data and determine the road surface.
Appropriate simulation diagrams plotted for the same
braking conditions as in (Aksjonov et al., 2019)
confirm these advantages. Since the optimal wheel
slip is approximately the same for both the front and
the rear left and right wheels, a quarter-vehicle model
described by Eqs. (1) – (6) is studied further.
Figure 12 introduces the traces obtained from the
friction-slip gradient control simulation. Here, the
total application torque (T, green) needed to ensure
intensive stopping in response to the driver’s setpoint
T
B
*
= 270 Nm is obtained after allocation between the
electric (T
E
, purple) and friction (T
F
, violet) torques,
wherein the electric torque is restricted to 200 Nm.
Since the motor response is much faster than that of
the friction unit, T
E
can be considered almost the same
as the demanded T
E
*
unless it exceeds the limitation
of the maximal electric power. Torque oscillations are
not observed here as they are damped by the torque
loop. At low velocity v
home
= 10 km/h, the friction
increases sharply due to its static fraction. The EB
turns off, and the torque begins fluctuate intensely.
Figure 13 confirms the effectiveness of the
torque-slip gradient control. Despite the fact that the
braking process lasts here 10% longer due to the
application torque delay and instability, the traces
look very similar to Fig. 12.
Fuzzy Gradient Control of Electric Vehicles at Blended Braking with Volatile Driving Conditions
257
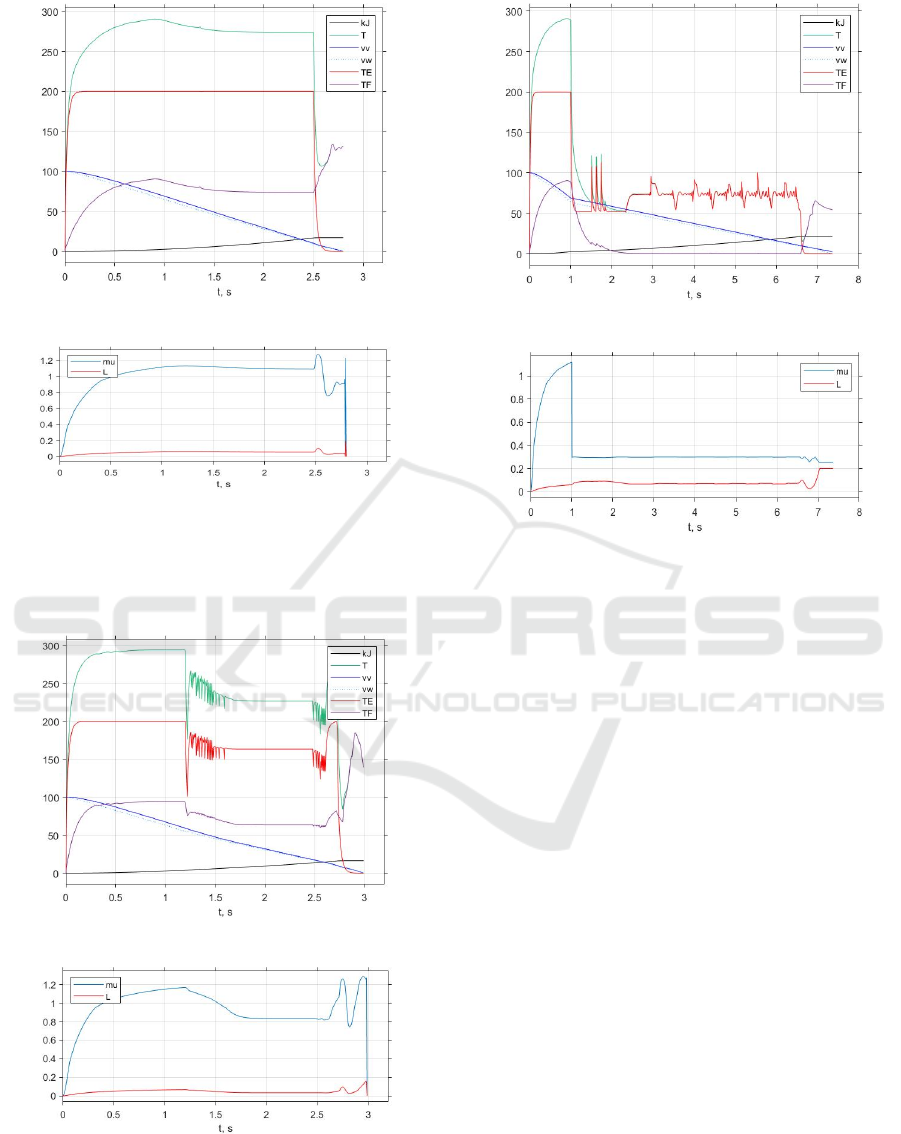
(a)
(b)
Figure 12: Friction-slip gradient braking diagrams at
constant tire-road friction: (a) – vehicle and wheel
velocities, electric, friction, and application torque, and
regenerative energy; (b) – tire-road friction and wheel slip.
(a)
(b)
Figure 13: Torque-slip gradient braking diagrams at
constant tire-road friction: (a) – vehicle and wheel
velocities, electric, friction and application torque, and
regenerative energy; (b) – tire-road friction and wheel slip.
(a)
(b)
Figure 14: Friction-slip gradient braking diagrams at
changing tire-road friction: (a) – vehicle and wheel
velocities, electric, friction, and application torque, and
regenerative energy; (b) – tire-road friction and wheel slip.
In order to investigate the effectiveness of the
proposed method in tracking more sophisticated
commands, vehicle motion above the changing road
surface was simulated. Figure 14 demonstrates the
traces obtained from the simulation of the volatile
driving using the friction-slip gradient control. Here,
the system successfully detects a change in road
conditions based on analysis of the friction-slip
gradient. At the beginning, the deceleration was
around 20 m/s
2
on a dry surface. At the end of the first
second, the road surface suddenly changes from dry
to wet. As the new gradient is recognized, the total
application torque needed to ensure an intensive stop
drops to 70 Nm. The FB is no longer requested
because the electric torque is sufficient to decelerate
the vehicle within the optimal wheel slip area.
Therefore, only electric braking is produced further.
However, when the speed drops below v
home
, the EB
turns off, friction braking resumes and the FB
operates alone.
Finally, Fig. 15 confirms the effectiveness of the
torque-slip gradient control at the volatile driving. It
represents the similar processes that take about 10%
longer braking time.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
258
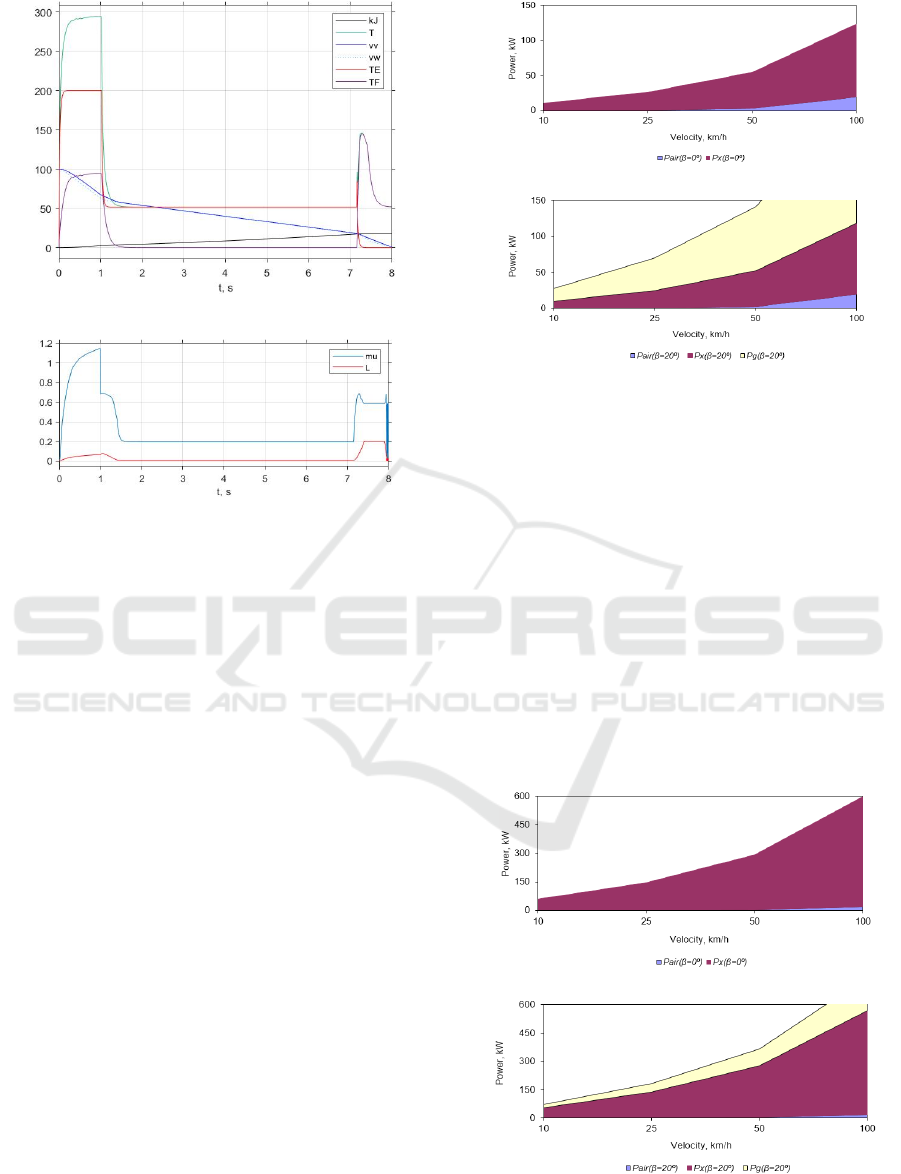
(a)
(b)
Figure 15: Torque-slip gradient braking diagrams at
changing tire-road friction: (a) – vehicle and wheel
velocities, electric, friction, and application torque, and
regenerative energy; (b) – tire-road friction and wheel slip.
Herewith, there is no more chattering in the torque
plots at low velocity. First, this is because the Wheel
block takes into account an increase of friction due to
its static fraction. Second, because the air friction is
involved in a close torque loop. Third and finally,
because the torque loop remains closed even without
the EB.
10 ANALYSIS OF ENERGY
RECOVERY
Based on the energy curves (kJ, black) and assuming
a 50% regenerative efficiency in Eq. (13), it turns out
from Figs. 12-(a) and 13-(a) that nearly 22 kJ of
energy is recovered during braking on the dry road.
In Figs. 14-(a) and 15-(a), despite the fact that the
stopping time is slightly increased, approximately the
same amount of energy is recovered as before.
To assess the degree of involvement of
aerodynamic and climbing resistances in energy
consumption and saving, simulation were performed
on the flat and 20º-downhill roads with different
velocities. An electric car with Q = 3 m
2
, ρ =
1.2 kg/m
3
, and C
air
= 0.5 was studied in the modes of
gradual (μ = 0.18) and intensive (μ = 1) braking.
(a)
(b)
Figure 16: Power components at gradual braking, = 0.18:
(a) β = 0; (b) β = 20.
At gradual braking without inclination (β = 0 in
Fig. 16-(a)), the friction power (P
x
) dominates only at
low velocity, whereas in rapid cruising a significant
part of energy is spent on overcoming the air
resistance (P
air
). On the slope (β = 20 in Fig. 16-(b)),
much recovered energy can be released due to the
climbing counterforce (P
g
). At heavy braking, the
friction force (P
x
) always prevails on both the
longitudinal (Fig. 17-(a)) and inclined (Fig. 17-(b))
driveways. However, until the friction factor reaches
its upper level, it passes all intermediate levels, from
0.18 to 1, and all velocities, from v
0
to 0. This means
that both the volatile vehicle velocity and variable
friction must be taken into account in braking control.
(a)
(b)
Figure 17: Power components at heavy braking, = 1:
(a) β = 0; (b) β = 20.
Fuzzy Gradient Control of Electric Vehicles at Blended Braking with Volatile Driving Conditions
259

11 CONCLUSION
In the refined vehicle model, multiple factors are
addressed, such as air resistance, road slope, and
changeable friction. An improved motor and energy
source model reflects the state of charge and electric
current/voltage restrictions of the hybrid energy
storage under various driving scenarios recognised by
the tire-road model, such as gradual deceleration and
emergency antilock braking in volatile driving
conditions. As a result, a proposed novel control
arrangement provides fuzzy adjustment and
stabilisation of the braking torque with a gradient
torque allocation between electric and friction brakes,
which allows integrating the advantages of both
friction and electric braking. Obtained simulation
diagrams largely coincide with the experimental
curves. They demonstrate consistently high braking
quality regardless of changes in the road surface and
slope, vehicle initial velocity, and air resistance.
ACKNOWLEDGEMENT
This work was supported by the Estonian Research
Council grant PRG658.
REFERENCES
Aksjonov, A., Vodovozov, V., Augsburg, K. and
Petlenkov, E., 2018. Design of regenerative anti-lock
braking system controller for 4 in-wheel-motor drive
electric vehicle with road surface estimation.
International Journal of Automotive Technology,
19(4):727 − 742.
Aksjonov, A., Vodovozov, V., Augsburg, K. and
Petlenkov, E., 2019. Blended antilock braking system
control method for all-wheel drive electric sport utility
vehicle. In ELECTRIMACS’19, 13th International
Conference of the IMACS TC1 Committee, Salerno,
Italy, pages 1 − 6.
Cecotti, M., Larminie, J. and Azzopardi, B., 2012.
Estimation of slip ratio and road characteristics by
adding perturbation to the input torque. In ICVES’12,
IEEE International Conference on Vehicular
Electronics and Safety, Istanbul, Turkey, pages 31 – 36.
Cerdeira-Corujo, M., Costas, A., Delgado, E., Barreiro, A.
and Banos, A., 2016. Gain-scheduled wheel slip reset
control in automotive brake systems. In SPEEDAM’16,
International Symposium on Power Electronics,
Electrical Drives, Automation and Motion, Anacapri,
Italy, pages 1255 – 1260.
Chen, Z., Lv, T., Guo, N., Shen, J., Xiao, R., Lu, X. and
Yu, Z., 2017. Study on braking energy recovery
efficiency of electric vehicles equipped with super
capacitor. In CAC’17, Chinese Automation Congress,
Jinan, China, pages 7231 – 7236.
Givigi Jr, S. N., Schwartz, H. M. and Lu, X. 2010. A
reinforcement learning adaptive fuzzy controller for
differential games. Journal of Intelligent and Robotic
Systems, 59(1):3 – 30.
Habibi, M. and Yazdizadeh, A., 2010. A novel fuzzy-
sliding mode controller for antilock braking system. In
2nd International Conference on Advanced Computer
Control, Shenyang, China, v. 4, pages 110 – 114.
Haidegger, T., Kovács, L., Preitl, S., Precup, R.-E.,
Benyó, B. and Benyó, Z. 2011. Controller design
solutions for long distance telesurgical applications.
International Journal of Artificial Intelligence, 6 (11
S):48 – 71.
Jing, H., Liu, Z. and Liu, J., 2011. Wheel slip control for
hybrid braking system of electric vehicle. In TMEE’11,
International Conference on Transportation,
Mechanical, and Electrical Engineering, Changchun,
China, pages 743 – 746.
Kadowaki, S., Ohishi, K., Hata, T., Iida, N., Takagi, M.,
Sano, T. and Yasukawa, S. 2007. Antislip adhesion
control based on speed sensorless vector control and
disturbance observer for electric commuter train AT
series 205-5000 of the east Japan railway company.
IEEE Transactions on Industrial Electronics,
54(4):2001 – 2008.
Kiyakli, O. and Solmaz, H., 2018. Modeling of an electric
vehicle with MATLAB/Simulink. International
Journal of Automotive Science and Technology,
2(4):9 – 15.
Li, W., Zhu, X. and Ju, J., 2018. Hierarchical braking torque
control of in-wheel-motor-driven electric vehicles over
CAN. IEEE Access, 6, pages 65189 – 65198.
Lin, H. and Song, C., 2011. Design of a fuzzy logic
controller for ABS of electric vehicle based on
AMESim and Simulink. In TMEE’11, International
Conference on Transportation, Mechanical, and
Electrical Engineering, Changchun, China, pages 779
– 782.
Naseri, F., Farjah, E. and Ghanbari, T., 2017. An efficient
regenerative braking system based on battery /
supercapacitor for electric, hybrid, and plug-in hybrid
electric vehicles with BLDC motor. IEEE Transactions
on Vehicular Technology, 66(5):3724 – 3738.
Pacejka, H., 2012. Tyre and Vehicle Dynamics (3rd ed.),
Oxford, UK: Butterworth–Heinemann.
Pratap, R. and Ruina, A., 2002. Introduction to Statics and
Dynamics. Oxford University Press.
Precup, R.-E., Tomescu, M.-L. and Dragos, C.-A. 2014.
Stabilization of Rössler chaotic dynamical system using
fuzzy logic control algorithm. International Journal of
General Systems, 43(5):413 – 433.
Radgolchin, M. and Moeenfard, H. 2018. Development of
a multi-level adaptive fuzzy controller for beyond pull-
in stabilization of electrostatically actuated microplates.
Journal of Vibration and Control. 24(5):860 – 878.
Reif, K. (Ed.), 2014. Brakes, Brake Control and Driver
Assistance Systems: Function, Regulation and
Components. Friedrichshafen, Germany: Springer.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
260

Savaresi, S. M. and Tanelli, M., 2010. Active Braking
Control Systems Design for Vehicles. London:
Springer.
Shang, M., Chu, L., Guo, J., and Fang, Y., 2010. Hydraulic
braking force compensation control for hybrid electric
vehicles. In CMCE’10, International Conference on
Computer, Mechatronics, Control and Electronic
Engineering, Changchun, China, pages 335 – 339.
Spichartz, P., Bokker, T. and Sourkounis, C., 2017.
Comparison of electric vehicles with single drive and
four wheel drive system concerning regenerative
braking. In EVER’17, 12th International Conference on
Ecological Vehicles and Renewable Energies, Monte-
Carlo, Monaco, pages 1 – 7.
Tao, Y., Xie, X., Zhao, H., Xu, W. and Chen, H., 2017. A
regenerative braking system for electric vehicle with
four in-wheel motors based on fuzzy control. In 36th
Chinese Control Conference, Dalian, China,
pages 4288 – 4293.
Xie, Y-B. and Wang, S-C, 2018. Research on regenerative
braking control strategy and Simulink simulation for
4WD electric vehicle. In ICMT’18, 2nd International
Conference on Manufacturing Technologies, Florence,
USA, pages 1 – 6.
Xu, W., Zhao, H., Ren, B. and Chen, H., 2016. A
regenerative braking control strategy for electric
vehicle with four in-wheel motors. In 35th Chinese
Control Conference, Chengdu, China, pages.
8671 – 8676.
Zhang, X. and Lin, H., 2018. UAV anti-skid braking system
simulation. In 37th Chinese Control Conference,
Wuhan, China, pages 8453 – 8458.
Fuzzy Gradient Control of Electric Vehicles at Blended Braking with Volatile Driving Conditions
261
