
Social Robots as Teaching Assistance System in Higher Education:
Conceptual Framework for the Development of Use Cases
Josef Guggemos, Michael Burkhard, Sabine Seufert and Stefan Sonderegger
Institute of Business Education and Educational Management – Digital Learning, University of St. Gallen,
St. Jakobstrasse 21, 9000 St. Gallen, Switzerland
Keywords: Social Robots, Humanoid Robots, Human Robot Interaction, Symbiotic Design, Teaching Assistance System.
Abstract: This paper provides an overview of the current state of research on social robots in higher education and the
existing frameworks to categorize and develop social robot applications. Based on the existing work, we
present our own framework to develop use cases for social robots in the education sector. Our framework is
based on a heuristic and symbiotic design approach that serves as a guideline for developing use cases and
views human-robot interaction as two complementary and mutually reinforcing roles. We illustrate our
framework by means of a use case that we have conducted in 2019 during the initial lecture of the large-scale
course ‘Introduction to academic writing’.
1 INTRODUCTION
Higher education faces a highly dynamic
environment. In light of the current technological
developments, an extensive substitution of human
labor by smart machines (artificial intelligence) may
come to the fore (King & Grudin, 2016; Nedelkoska
& Quintini, 2018). In this context, Davenport and
Kirby (2016) put the focus on mutual
complementation and collaboration (augmentation),
i.e., “people and computers supported each other in
the fulfilment of tasks” (p. 2). According to Jarrahi
(2018), augmentation can be conceptualized as a
“Human-AI symbiosis” where the collaboration
between humans and artificial intelligence (AI) can
make both parties smarter over time (p. 583). This
kind of symbiosis may change if the communication
partner takes on a physical form through social
robots. Due to the increasing attention to AI and
Human-Computer-Interactions or more specific
Human-Robot-Interactions (HRI), the development
and use of AI-based robots is recently an emerging
field in many areas such as medicine, finance, service
industries, and education (Thimm et al., 2019).
Social robots increasingly pervade the daily life.
Breazeal (2003) refers to social robots as machines
“that people apply a social model to in order to
interact with and to understand” (p. 167).
Social robots have the potential to become
integral part of the educational infrastructure (Mubin,
Stevens, Shahid, Al Mahmud, & Dong, 2013;
Belpaeme, Kennedy, Ramachandran, Scassellati, &
Tanaka, 2018). However, until now, the
implementation of social robots in education has been
rather scarce since it is a relatively new emerging
research field and requires considerable resources.
Instead, studies have often tried to implement
pedagogical agents and traditional intelligent tutoring
systems in learning scenarios (e.g., Baker, 2014). In
contrast to these learning technologies, social robots
interact with students in a synchronous way making it
possible to react on individual intents with a physical
presence. The potential of social robots as assistant
systems in education is a rather new phenomenon. In
a recent literature review, Belpaeme et al. (2018)
summarized the state of the art. Assuming that social
robots increasingly pervade future workplaces,
students may need training to efficiently collaborate
with digital assistants. Since digital assistants might
be social robots in the future, students should be able
to understand the future today and acquire skills to
help shaping the future in terms of using social robots
with focus on augmentation and a fruitful symbiotic
approach.
Guggemos, J., Burkhard, M., Seufert, S. and Sonderegger, S.
Social Robots as Teaching Assistance System in Higher Education: Conceptual Framework for the Development of Use Cases.
DOI: 10.5220/0009794801250132
In Proceedings of the 12th International Conference on Computer Supported Education (CSEDU 2020) - Volume 1, pages 125-132
ISBN: 978-989-758-417-6
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
125
2 DEFINITION OF SOCIAL
ROBOTS
Due to the wide variety of different appearances of
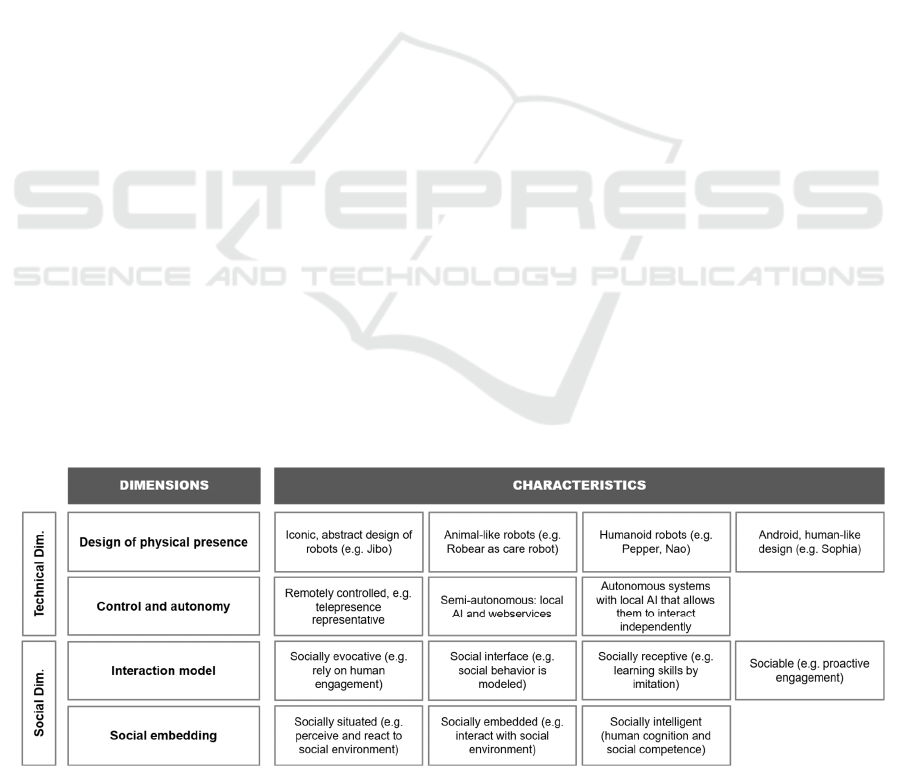
social robots, it is necessary to classify them. Table 1
elaborates the characteristics of social robots by
distinguishing between technical and social
dimensions. The first technical dimension to classify
a social robot is the physical presence and thus the
design of the robot from abstract to human-like
(Baraka, Alves-Oliveira, & Ribeiro, 2019). The
second technical dimension comprises the degree of
autonomy of the robot, ranging from remote-
controlled to completely autonomous. The social
dimensions (Breazeal, 2003) show on the one hand
the development stage of the robot interaction model
and on the other hand the social embedding in the
environment. The interaction can range from
evocative and rather passive to sociable and
proactive. The dimension of social embedding adds a
broader focus on the social behavior and integration
into the environment. It ranges from pure perception
and reaction to the social environment to a socially
intelligent robot with full social competence (Fong,
Nourbakhsh, & Dautenhahn, 2003).
3 RESEARCH GOALS AND
METHODS
The aim of the paper at hand is to investigate the
potential of social robots for educational purposes in
higher education because there is a research gap in
terms of pedagogical uses and the robots’ social
capabilities. In this vein, it may be important to
investigate whether the social robot can be useful in
the social environment as an autonomous system and
how the interaction between human and robot is
changing over time. Conceptual frameworks might be
useful for designing use cases as an iterative pilot
testing. Hence, the paper at hand might act as a
stepping stone for coming researchers who might
more efficiently uncover further potential of the
technology, e.g., type of robot to use, how to adapt it
properly to a use case, what kind of architecture the
robot system might need, how to achieve the greatest
pedagogical value, etc.
In light of the identified research gap, the
following overarching research question should be
addressed:
How can use cases be designed for social robots as
assistance systems in higher education to improve the
learning process and enhance learning experiences
(e.g., reaching new learning goals) of higher-
education students?
The objectives of the paper at hand are therefore
twofold:
Analysis of empirical studies with social robots
in order to investigate underlying assumptions,
goals, methods and empirical results for
designing and evaluating the use cases;
Development of a conceptual framework as an
appropriate methodology to theoretically
founded develop use cases for social robots as
assistant systems in higher education.
To this end, we lay the foundation for our framework
in section 4 by conducting two literature reviews.
First, we look at how social robots have been used in
higher education. Second, we provide an overview of
Table 1: Characteristics of social robots as socio-technical systems.
.
Note: Draws on the work of Breazeal (2003), Duffy (2003), Fong et al. (2003), Belpaeme et al. (2018), and Baraka et al.
(2019).
CSEDU 2020 - 12th International Conference on Computer Supported Education
126
existing frameworks in the field of social robots.
Section 5 lays out our own extended framework.
Section 6 concludes with some final remarks.
4 LITERATURE REVIEW
4.1 Context: Social Robots in Higher
Education
The EBSCOhost database and the IBM Science
Summarizer Beta database were searched to find
relevant literature focusing on the use of social robots
in higher education. The abstracts were searched for
terms such as humanoid robots or social robots or
higher education and university or college or lecture
or post-secondary or postsecondary.
The search procedure yielded a total of 20
relevant papers. The earliest study appeared in 2012,
the latest study was published in 2019. Four
contributions were literature reviews. A majority of
fourteen contributions analyzed the deployment of
humanoids in lectures to foster students’ learning
outcome. The remaining two studies examined
specific aspects of the topic, e.g., design of
humanoids in higher education.
Clustering the studies according to their subjects
revealed that eight studies focused on STEM, one
study focused on Business, one study focused on
STEM & Business, one study focused on Languages,
and five studies did not provide information about the
subject.
Four studies focused on undergraduate students,
two studies focused on graduates, one study focused
on graduates and undergraduates and nine studies did
not provide information about the university level.
In terms of the educational setting, the studies
differed in the following ways: Eight studies were
carried out in a lecture or classroom settings, three in
workshops or as part of a group work, two in a
laboratory environment and three studies did not
provide the necessary information.
The roles that the social robots took in the studies
also varied. In five studies the robot acted as a lecturer
or tutor, in two studies as a teaching assistant, in two
studies as a mediator or partner and in three studies
the robot was used as a test platform for the
development of applications. One study used the
robot as an educational means to teach technology
related content (Flynn, 2017). Three studies did not
provide the necessary information.
4.2 Design: Frameworks for Social
Robot Use Cases
The EBSCO database, the IBM Science Summarizer
Beta database and Google Scholar were searched to
find journal articles and conference papers focusing
on conceptual frameworks in combination with HRI.
Search terms were conceptual framework or
theoretical framework or reference architecture or use
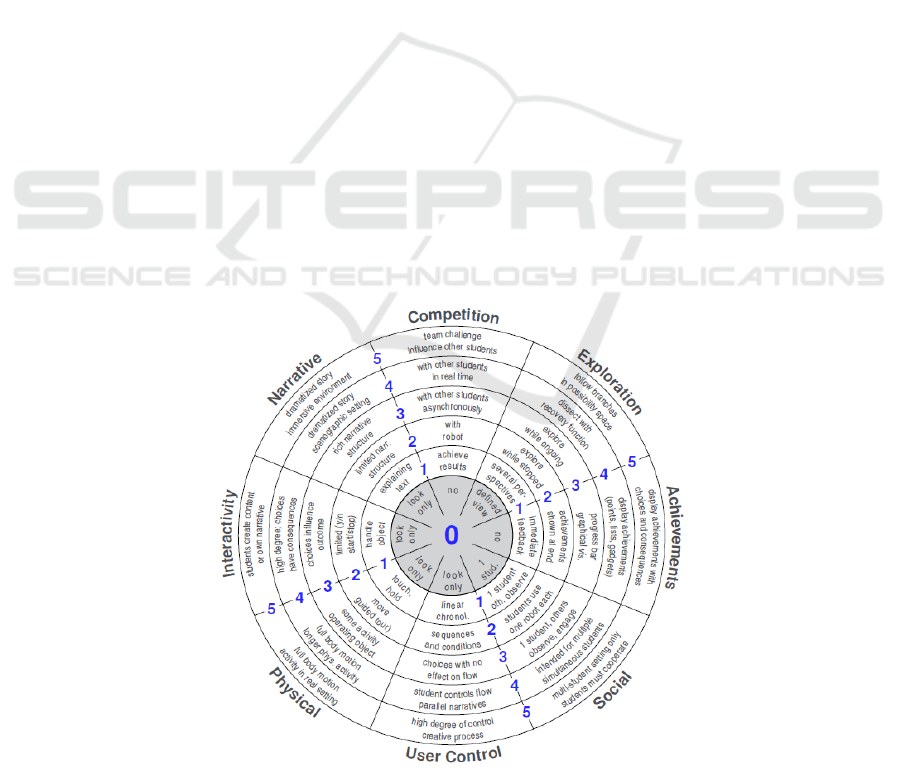
Figure 1: The dimensions of the engagement profile (Cooney & Leister, 2019, p.8).
Social Robots as Teaching Assistance System in Higher Education: Conceptual Framework for the Development of Use Cases
127

case and human robot interaction or social robot
interaction. Subsequently, the results were manually
filtered. Overall, fourteen relevant papers were
identified. The earliest study appeared in 2002,
whereas the latest study was published in 2020. We
split them up into three types.
The first type comprises studies that provide
frameworks with robots in automatization processes
and industry related contexts. Studies, which regard
robots more as a tool than as a social counterpart also
belong to this category. Often, they focus on the
technical implementation. For examples, see
Radanliev, Roure, Nicolescu and Huth (2019) or
Cuevas, Fiore, Caldwell and Strater et al. (2007).
The second type consists of studies with
frameworks about social robots in their environment.
Breazeal et al. (2004) propose an early framework
towards robots as partners rather than robots as tools.
You and Robert (2018) provide a framework for
human-robot teamwork. Their framework describes
which characteristics are brought into a work process
by which parties (humans, robots) and how this leads
to team output.
Belanche, Casaló, Flavián and Schepers (2020)
create a theoretical framework for the implementation
of service robots. In three categories (robot design,
customer features, services encounter characteristics)
they identify important factors for a successfull
design and implementation of service robots.
Baraka et al. (2019) provide an extended
framework for characterizing social robots. Their
framework covers along seven dimensions the
interaction and the relational role between robot,
human and the context. In addition, they outline
different approaches for designing human robots:
human-centered design, robot-centered design, and
symbiotic design (Baraka et al., 2019, pp. 31–33). To
develop social robots in a symbiotic design, Baraka
et. al. (2019, p. 33) recommend identifying the
relative strengths and weaknesses of each party. They
refer to the study of Veloso, Biswas, Coltin, and
Rosenthal (2015), in which autonomous robots ask
humans for help with certain activities, such as
pressing the elevator button for them. This little
assistance from humans allows the robots to navigate
on several floors without the need for any robot hands
and makes the implementation of use cases easier and
cheaper.
The third type comprises studies with frameworks
about social robots in the context of education. Yang
and Zhang (2019) develop design guidelines for an
intelligent tutoring robot in the tension field between
human tutor, student, curriculum, and social milieu.
Its scope is relatively narrow, as it only covers the use
case of the tutor and no other potential applications in
the education sector. Cooney and Leister (2019)
provide a more general framework by adapting the
engagement profile to the educational context. In an
exploratory study at a graduate school, they defined
potential useful capabilities to create a prototype for
a robotic teaching assistant. Based on this, they
weekly tested the robot in a classroom and used the
engagement profile to iteratively improve their robot.
Seven contributions were related to type 1, i.e.,
they provide frameworks for robots from a more
technical view in an industry related setting. Five
contributions are type 2 studies with a focus on the
social interaction between humans and social robots.
The remaining two studies were type 3 studies, i.e.,
they provide frameworks for social robots in
education.
5 RESULT: CONCEPTUAL
FRAMEWORK
5.1 Structure of the Framework
Based on the available frameworks, summarized in
the previous section, this chapter lays out our own
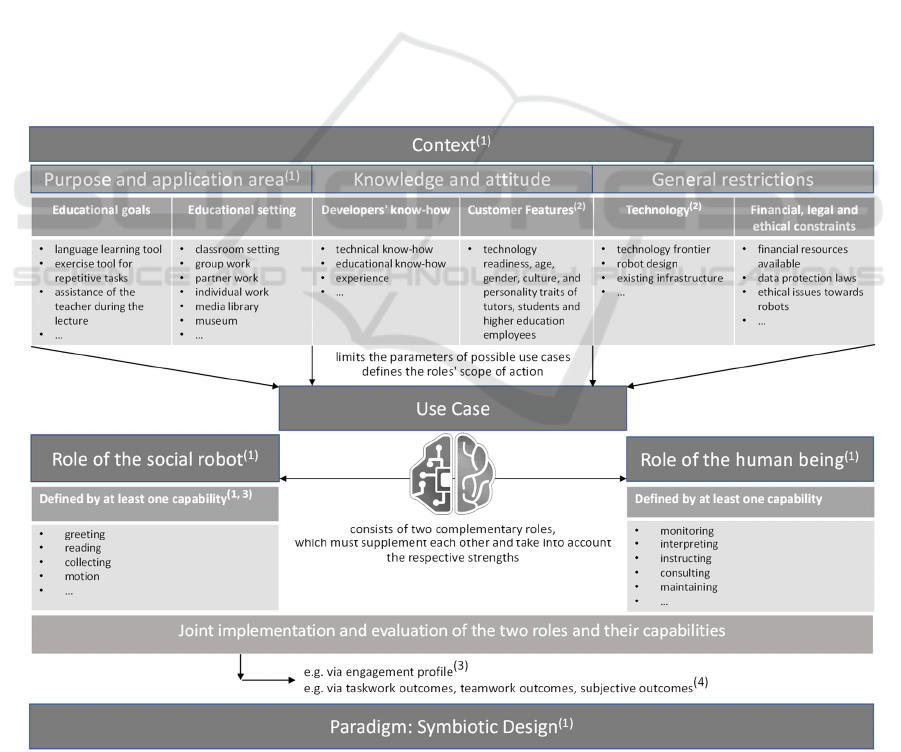
extended framework (see Figure 2). Similar to the
framework of Baraka et al. (2019) our framework
focuses on the overall system behavior of robot,
human, and context. While Baraka et al. (2019, p. 3)
define the context as “Purpose and application area”,
we take a broader view of this notion and add further
elements to it.
Knowledge and attitude of the stakeholders
towards social robots may be of central importance
for the successful implementation of a use case. This
applies to both the development team and the users.
To represent the requirements and features of the
users, we utilize the term customer features from
Belanche et al. (2020) who have chosen this element
as a key part of their framework.
Belanche et al. (2020) deal in their framework
also with technical aspects in the form of robot
design. Therefore, we integrate the element
technology into our model. Together with financial,
legal and ethical constraints, they complete the
category context.
Baraka et al. (2019) as well as Cooney and Leister
(2019) define the role of social robots by its
capabilities. In addition, the role of humans may also
be defined by their capabilities. The specific
capabilities of both parties (humans and robots) are
considered to form the use case. We propose that as
CSEDU 2020 - 12th International Conference on Computer Supported Education
128
an evaluation tool the engagement profile of Cooney
and Leister (2019) or various outcome measures (You
& Robert, 2018) could be used.
In contrast to the frameworks that we have drawn
on, we put educational aspects into focus and at the
same time try to keep the model as generic as
possible, to cover a broad variety of use cases.
We consider our framework as a design-
specification tool to serve as a guideline for the
development of own use-cases. In our understanding,
the awareness of the complementary roles of humans
and robots in interaction with the context may help to
avoid pitfalls and to create better use cases.
5.2 Paradigm: Symbiotic Design
We follow the symbiotic design approach as outlined
by Baraka et al. (2019, pp. 31–33). Not every
implementation that is technically possible may also
be useful. It is important to consider the relative
strengths of humans and social robots and create
applications against this background. The purpose of
social robots is not to replace humans, but to support
humans by extending their capabilities where
necessary. Otherwise, social robots will not find
social acceptance in the long run. According to our
understanding, it is important to view the interaction
between humans and robots as two complementary,
mutually reinforcing roles.
5.3 Context
In our framework, we follow a heuristic development
approach that creates solution-oriented applications
for practical use with limited resources. When
developing a use case, the development team faces
multiple restrictions due to the context. As a first step,
the development team should think about the context
and record it in writing. The context later implicitly
defines the scope of action.
Depending on the educational goal and setting, the
project must meet different requirements. The
development team has to meet these requirements and
at the same time deliberately assess their own know-
how and anticipate the know-how and attitude of the
future users.
Note. (1) Baraka et al. (2019), (2) Belanche et al. (2020), (3) Cooney and Leister (2019), (4) You and Robert (2018).
Figure 2: Conceptual framework for the development of use cases with social robots.
Social Robots as Teaching Assistance System in Higher Education: Conceptual Framework for the Development of Use Cases
129

The existing infrastructure, the available
technology and the technology frontier should also be
considered. Against this backdrop, the integration and
the usage of already existing services (e.g., text-to-
speech-services) may be preferable to in-house
development, as in-house developments can be very
expensive or even impossible.
Finally, each development team must stay within
the budget and comply with legal and ethical
restrictions (e.g., data protection policies), which
influence which use-cases can or cannot be
implemented.
In its entirety, the context restricts possible use
cases. At the same time, the context also defines the
scope of action for the role of humans and robots.
5.4 Roles of Robot and Human Being
In our understanding, a use case consists of two
complementary roles: The role of the social robot and
the role of the human being. Both roles should
supplement each other and take into account the
respective strengths. Cooney and Leister (2019)
described potential roles for a social robot. The robot
could take over the role of a tutor outside class, of an
avatar or of a teaching assistant. Many more such
roles for socials robot are possible. In our
understanding, humans also play such a role when
interacting with robots. Depending on the context and
the role of the robot, humans could, for example, take
on the role of a supervisor, a maintainer or a mediator.
5.5 Capabilities
In a second step, the development team should design
the roles of humans and robots and their capabilities.
Each role is defined by at least one capability. Cooney
and Leister (2019) mention reading, greeting,
alerting, remote operation, clarification, and motion
as potential capabilities of a robot teaching assistant.
Depending on the use case, the role and the associated
capabilities will change. To give a second example,
the capabilities of a robot concierge in a museum
could be greeting, reading, informing and orientating.
5.6 Implementation and Evaluation
Measures
Measures for implementation and evaluation are
important as a tool to get feedback and iteratively
improve the design. One possible approach for
implementation might be through the engagement
profile.
The engagement profile was originally used for
installations and exhibits in science centers and
museums (Leister et al., 2017). Cooney and Leister
(2019) adapted the engagement profile to the teaching
case (see Figure 1). They argue that similar to
installations in science centers, a social robot
represents an artefact that the students interact with
during their studies and classes. Along the eight
dimensions of the engagement profile (competition,
narrative elements, interaction, physical activity, user
control, achievements awareness, exploration
possibilities) the capabilities can be defined,
measured on a scale and be reevaluated and adjusted
in an iterative process.
The engagement profile is a promising approach
to measure robot capabilities on scales. However,
further research is needed as the dimensions of the
model come from the world of museums and science
centers and may not always fit into a social robot
setting. In addition, the question arises how the
engagement profile is to be used to evaluate the team
performance of humans and robots together.
At this point, the work of You and Robert (2018)
might offer a viable approach. They distinguish
between different team outputs (taskwork outcomes,
teamwork outcomes, subjective outcomes) of robot-
human teams, which could be measured and
evaluated.
5.7 Example for an Implementation
The following section illustrates our framework by
means of a use case that we conducted in 2019 during
the initial lecture of the large-scale course
‘Introduction to academic writing’ (see Figure 3). The
course was mandatory for all the 1,552 freshmen at
our university who were on average 19.77 years old.
The course has an English track (470 students) and a
German one (1,082 students). Therefore, the lecture
was conducted in both English and German.
Apart from our primary goal of the course to
introduce students to academic writing, our
educational goal with the robot was to offer the
students a representative sample of tasks that a social
robot might perform within the context of learning. In
the lecture we also wanted to inform about plagiarism
and plagiarism software.
For the implementation of our use case we could
count on the support of raumCode, a company
specialized on humanoid robots and artificial
intelligence, as well on the educational know-how
from our chair of Business Education. A type Pepper
model (SoftBank Robotics) owned by our chair is at
our disposal.
CSEDU 2020 - 12th International Conference on Computer Supported Education
130
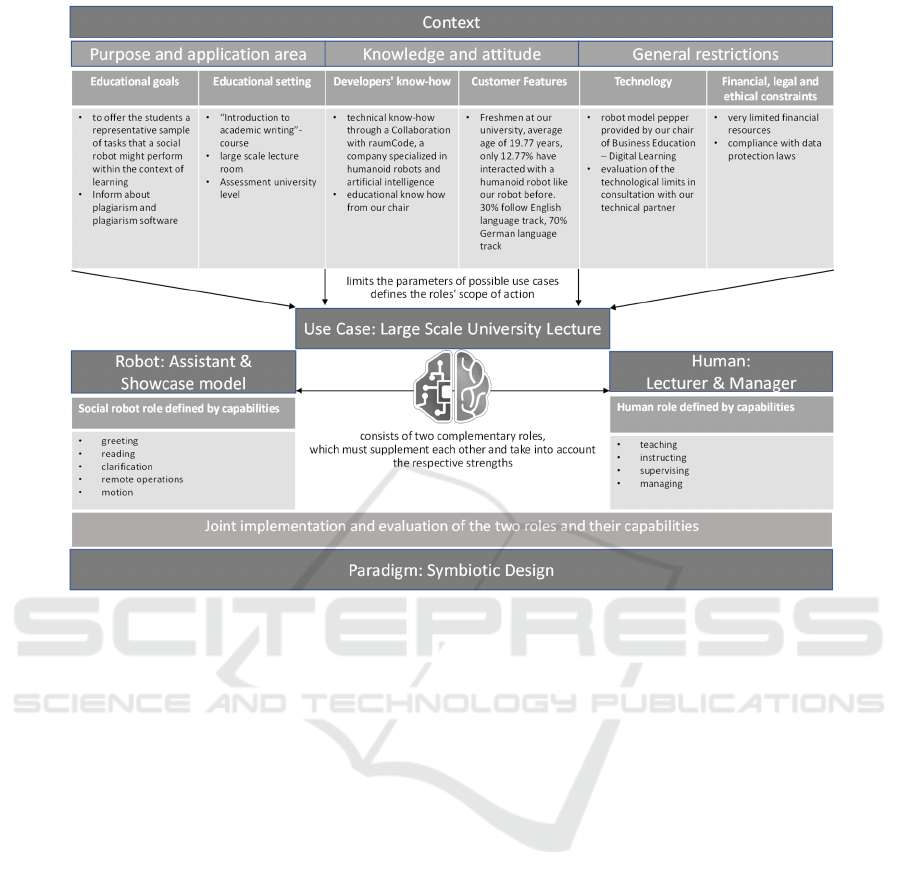
Figure 3: Use case: Social robot Lexi as a teaching assistant in an academic writing course at university.
Based on the given context, we decided to put the
robot in a co-role with the lecturer. The robot should
support the lecturer during the course as an assistant
and showcase model. In return, the lecturer should
lead the lesson and supervise the action of the robot.
In the sense of a complementary and symbiotic
distribution of roles between humans and robots, we
found it appropriate to let the robot do those parts of
the lecture that are related to computer science in the
broadest sense. In this area, the robot can play its
natural strength, because, unlike humans, it can be
connected to application programming interfaces
(APIs), for example.
Among others, the robot in our course explained
plagiarism and its detection by plagiarism software -
and searched for the lecturer's sources for
"greenwashing" in the database of our university
library.
6 DISCUSSION AND OUTLOOK
By means of our literature reviews, we could identify
several studies that explore the use of social robots in
higher education and beyond. However, a number of
challenges for the use of socio-technical systems must
also be taken into account. The introduction of these
technologies into pedagogical practice involves the
solution of technical challenges and requires changes
in pedagogical practice. Moreover, ethical concerns
have to be addressed (Belpaeme et al., 2018). To what
extent it is desirable to delegate education to social
robots has to be discussed in-depth. In this discussion
criteria that go beyond learning efficiency, i.e.,
learning outcomes and costs, should be considered.
The main contribution of our paper is the
development of a conceptual framework in order to
derive theoretically sound use cases for social robots
as assistance systems in higher education. We have
demonstrated the usefulness of the framework by
illustrating our empirical study with the social robot
Pepper in an academic writing course.
In several development cycles, innovative
practical solutions are to be developed, which at the
same time are to produce theories with saturated
evidence that can be used as research results. The
transferability of the innovation developed is less to
be found in the problem solution itself, but rather in
the development of transferable theories: “Theory
informing practice is at the heart of the approach, and
the creation of design principles and guidelines
enables research outcomes to be transformed into
Social Robots as Teaching Assistance System in Higher Education: Conceptual Framework for the Development of Use Cases
131

educational practice” (Reeves, Herrington, & Oliver,
2005, p. 107).
An open question is still how to evaluate the use
cases and in particular the human-robot interactions.
From a symbiotic research paradigm, the evaluation
should focus on the behavior of both partners, human
and robot: Does the human adapt to the robot, and the
robot adapt to the human, in a way that benefits the
interaction? At the current technological state there is
much room for improvement in terms of the human-
robot relationship. The goal should be that robots act
in a way that could be regarded as social in its original
sense.
REFERENCES
Baker, R.S. (2014). Educational data mining: An advance
for intelligent systems in education. IEEE Intelligent
systems, 29(3), 78–82.
Baraka, K., Alves-Oliveira, P., & Ribeiro, T. (2019). An
extended framework for characterizing social robots.
ArXiv Preprint ArXiv:1907.09873.
Belanche, D., Casaló, L. V., Flavián, C., & Schepers, J.
(2020). Service robot implementation: a theoretical
framework and research agenda. The Service Industries
Journal, 40 (3-4), 203–225.
Belpaeme, T., Kennedy, J., Ramachandran, A., Scassellati,
B., & Tanaka, F. (2018). Social robots for education: a
review. Science Robotics, 3(21), 1–9.
https://doi.org/10.1126/scirobotics.aat5954
Breazeal, C. (2003). Toward sociable robots. Robotics and
Autonomous Systems, 3-4(42), 167 175.
Breazeal, C., Brooks, A., Chilongo, D., Gray, J., Hoffman,
G., Kidd, C., Lee, H., Lieberman, J., & Lockerd, A.
(2004). Working collaboratively with humanoid robots.
In 4th IEEE/RAS International Conference on
Humanoid Robots, 2004. Symposium conducted at the
meeting of IEEE.
Cooney, M., & Leister, W. (2019). Using the engagement
profile to design an engaging robotic teaching assistant
for students. Robotics, 8 (1), 21.
Cuevas, H. M., Fiore, S. M., Caldwell, B. S., & Strater, L.
(2007). Augmenting team cognition in human-
automation teams performing in complex operational
environments. Aviation, Space, and Environmental
Medicine, 78 (5), B63‐B70.
Davenport, T. H., & Kirby, J. (2016). Only humans need
apply: Winners and losers in the age of smart machines
(First edition). New York, NY: Harper Business.
Duffy, B.R. (2003). Anthropomorphism and the social
robot. Robotics and Autonomous Systems, 3-4(42), 177
190.
Flynn, P. (2017). Using an Autonomous Humanoid Robot
as a Pedagogical Platform in the Business Classroom.
Journal of Social Science Studies, 4 (1), 178–188.
Fong, T., Nourbakhsh, I. & Dautenhahn, K. (2003). A
survey of socially interactive robots. Robotics and
Autonomous Systems, 3-4(42), 143 166.
Jarrahi, M. H. (2018). Artificial intelligence and the future
of work: human-ai symbiosis in organizational decision
making. Business Horizons, 61(4), 577–586.
https://doi.org/10.1016/j.bushor.2018.03.007
King, J. L., & Grudin, J. (2016). Will computers put us out
of work? Computer, 49(5), 82–85.
https://doi.org/10.1109/MC.2016.126
Leister, W., Tjøstheim, I., Joryd, G., Brisis, M. de,
Lauritzsen, S., & Reisæter, S. (2017). An evaluation-
driven design process for exhibitions. Multimodal
Technologies and Interaction, 1 (4), 25.
Mubin, O., Stevens, C. J., Shahid, S., Al Mahmud, A., &
Dong, J. J. (2013). A review of the applicability of
robots in education. Journal of Technology in
Education and Learning, 1(209-0015), 13.
Nedelkoska, L., & Quintini, G. (2018). Automation, skills
use and training. OECD Social,
Employment and
Migration Working Papers No. 202. Paris.
https://doi.org/10.1787/2e2f4eea-en
Radanliev, P., Roure, D. de, Nicolescu, R., & Huth, M.
(2019). A reference architecture for integrating the
Industrial Internet of Things in the Industry 4.0. ArXiv
Preprint ArXiv:1903.04369.
Reeves, T., Herrington, J. & Oliver, R. (2005). Design
Research: A Socially Responsible Approach to
Instructional Technology Research in Higher
Education. Journal of Computing in Higher Education,
16(2), 97–116.
Thimm, C., Regier, P., Cheng, I. C., Jo, A., Lippemeier, M.,
Rutkosky, K, Bennewitz, M., Nehls, P. (2019). Die
Maschine als Partner? Verbale und non-verbale
Kommunikation mit einem humanoiden Roboter. In C.
Thimm & T. C. Bächle (Eds.), Die Maschine: Freund
oder Feind: Mensch und Technologie im digitalen
Zeitalter (pp. 109–134). Wiesbaden: Springer.
https://doi.org/10.1007/978-3-658-22954-2_6
Veloso, M. M., Biswas, J., Coltin, B., & Rosenthal, S.
(2015). CoBots: Robust Symbiotic Autonomous
Mobile Service Robots. In IJCAI (p. 4423).
Yang, J., & Zhang, B. (2019). Artificial Intelligence in
Intelligent Tutoring Robots: A Systematic Review and
Design Guidelines. Applied Sciences, 9 (10), 2078.
You, S., & Robert, L. (2018). Teaming up with robots: An
IMOI (inputs-mediators-outputs-inputs) framework of
human-robot teamwork. You, S. And Robert, LP (2017).
Teaming up with Robots: An IMOI (Inputs-Mediators-
Outputs-Inputs) Framework of Human-Robot
Teamwork, International Journal of Robotic
Engineering, (IJRE), 2 (3).
CSEDU 2020 - 12th International Conference on Computer Supported Education
132
