
Stiffness Analysis of a New Tensegrity Mechanism
based on Planar Dual-triangles
Wanda Zhao
1
, Anatol Pashkevich
1,2
Alexandr Klimchik
3
and Damien Chablat
1,4
1
Laboratoire des Sciences du Numérique de Nantes (LS2N), UMR CNRS 6004, 1 rue de la Noe, 44321, Nantes, France
2
IMT Atlantique Nantes, 4 rue Alfred-Kastler, 44307, Nantes, France
3
Innopolis University, Universitetskaya St, 1, Innopolis, 420500, Tatarstan, Russia
4
Centre National de la Recherche Scientifique (CNRS), France
Keywords: Tensegrity Mechanisms, Equilibrium Configurations, Stability Analysis, Stiffness Analysis.
Abstract: The paper deals with the stiffness analysis and stability study of a new type of tensegrity mechanism based
on dual-triangle structures, which actuated by adjusting elastic connections between the triangle edges. For a
single segment of such mechanism, the torque-deflection relation was obtained as a function of control inputs
and geometric parameters. It was proved that a single section of the mechanism can has either a single or three
equilibrium configurations that can be both stable and unstable. Corresponding conditions of stability were
found allowing user to choose control inputs ensuring the mechanism controllability, and the obtained results
are confirmed by the simulation examples. The structure composed of two segments in serial was also
analysed and an equivalent serial structure with non-linear virtual springs in the joints was proposed. It was
proved that the stiffness of such structure decreases while the external loading increases, which may lead to
the buckling phenomenon.
1 INTRODUCTION
Many modern robotic applications require new type
of manipulators that possess high flexibility similar to
an elephant trunk (Rolf, M., Steil, J. J. 2012), (Yang,
Y., Zhang, W. 2015). Such manipulators are usually
composed of a number of similar segments based on
varies tensegrity mechanisms, which are assembly of
compressive elements and tensile elements (cables or
springs) held together in equilibrium (Skelton, R. E.,
de Oliveira, M. C. 2009), (Moored, K. W., Kemp, T.
H. et al. 2011). This paper concentrates on the
stiffness analysis and equilibrium stability of a new
type of tensegrity mechanism composed of two rigid
triangle parts, which are connected by a passive joint
in the centre and two elastic edges on each sides with
controllable preload.
Some kinds of the tensegrity mechanisms have
been already studied carefully in literature (Duffy, J.,
Rooney, J. et al. 2000), (Arsenault, M., Gosselin, C.
M. 2006). In particular, the cable-driven X-shape
tensegrity structures were considered in (Furet, M.,
Lettl, M., et al. 2018), (Furet, M., Wenger, P. 2018),
where each section was composed of four fixed-
length rigid bars and two springs. For this
mechanism, the authors investigated influence on the
cable lengths on the mechanism equilibrium
configurations, which maybe both stable and
unstable. Special attention was paid to the work space
and singularities analysis. Another group of related
works (Arsenault, M., Gosselin, C. M. 2006) deals
with the mechanism composed of two springs and
two length-changeable bars. The authors analysed the
mechanism stiffness using the energy method, and
demonstrated that the stiffness of this mechanism
always decreases when it is subjected to external
loads with the actuators locked, which may lead to
“buckling”. Some other research in this area (Wenger,
P., Chablat, D. 2018) focus on the three-spring
mechanisms, for which the equilibrium
configurations stability and singularity were
analysed. Using these results the authors obtained
conditions under which the mechanism can work
continuously, without the “buckling” or “jump”
phenomenon. There are also some research studying
a four-legged parallel platform (Moon, Y., Crane, C.
D., et al 2012), which is based on the compliant
tensegrity mechanisms. Here, each leg consists of a
piston and a spring in series, which allows the
platform to achieve in the desired position and
orientation. The authors investigated the loaded
equilibrium configurations and numerically
402
Zhao, W., Pashkevich, A., Klimchik, A. and Chablat, D.
Stiffness Analysis of a New Tensegrity Mechanism based on Planar Dual-triangles.
DOI: 10.5220/0009803104020411
In Proceedings of the 17th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2020), pages 402-411
ISBN: 978-989-758-442-8
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
computed the platform stiffness. However, the
tensegrity mechanism based on dual-triangles were
not studied in robotic literature yet.
This paper focuses on the stiffness analysis of a
new tensegrity mechanism, which is based on rigid
dual-triangles connected by a passive joint that is
actuated by adjusting elastic connections between the
remaining triangle edges. This structure is proved to
be very promising for designing of multi-section
series chain possessing very high flexibility. For this
mechanism, we concentrate on the equilibriums
computing, the stability analysis and the selection of
the geometric parameters and control inputs allowing
to achieve the desired configuration while ensuring its
stability. The loaded and unloaded stiffness analysis
of two-segments structure were also carried out in
detail. The results provide a good base of the study of
the multi-segment manipulators in the future work.
2 GEOMETRY ANALYSIS AND
EQUILIBRIUM EQUATION
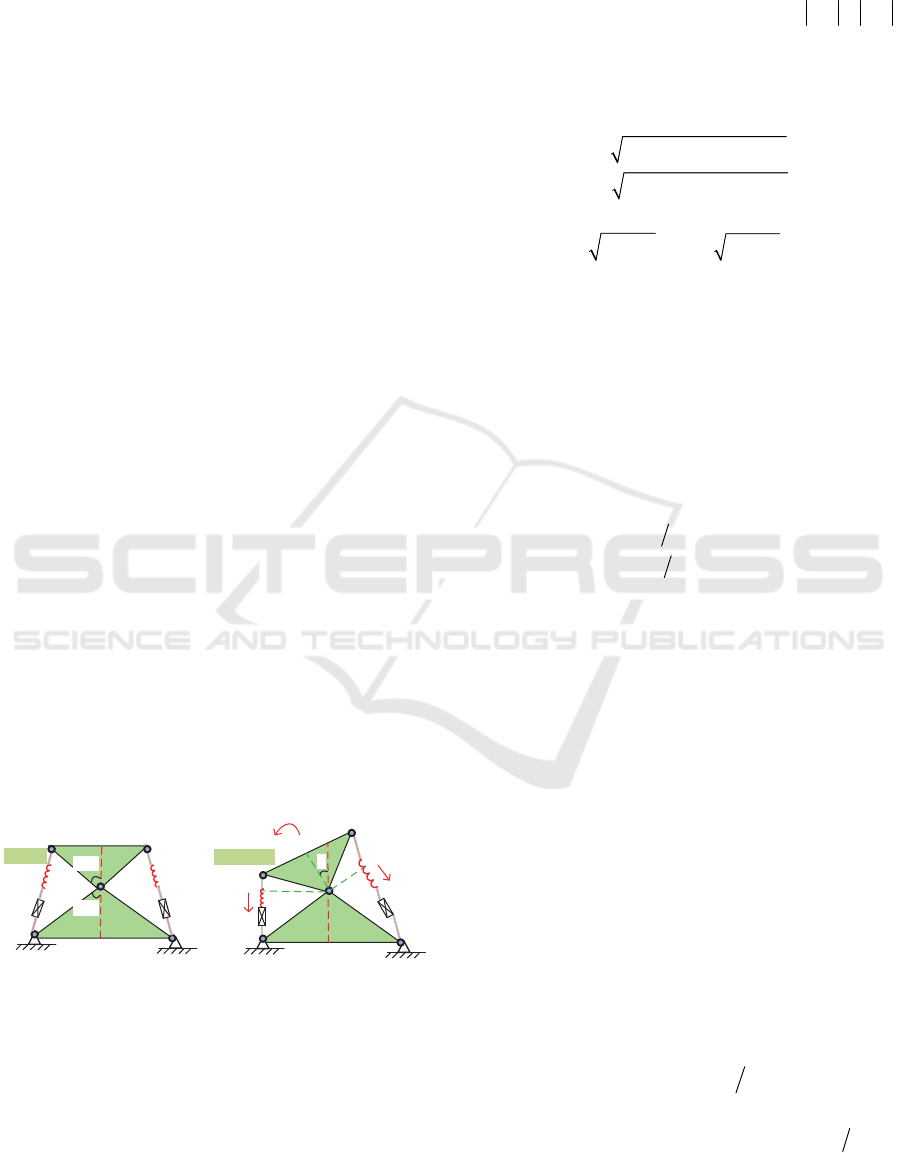
Let us consider first a 1-d.o.f. segment of the total
flexible structure to be studied, which consists of two
rigid triangles connected by a passive joint whose
rotation is constrained by two linear springs as shown
in Fig. 1. It is assumed that the mechanism geometry
is described by the triangle parameters
11
(,)ab
and
22
(,)ab
, and the mechanism shape is defined by the
angle that can be adjusted by means of two control
inputs influencing on the spring lengths
1
L
and
2
L
.
Let us denote the spring lengths in the non-stress state
as
0
1
L
and
0
2
L
,and the springs stiffness coefficients
1
k
and
2
k
.
2a
1
2a
2
b
1
b
2
L
1
L
2
M
ext
F
1
F
2
q
h
1
h
2
A
B
D
C
O
q=0
q
0
β
1
β
2
Figure 1: Geometry of a single segment of the mechanism.
To find mechanism configuration angle
q
corresponding to given control inputs
0
1
L
and
0
2
L
, let
us derive the static equilibrium equation. The forces
1
F
,
2
F
generated by the springs can be obtained from
Hook’s law as follows.
00
1111 2222
(); ( )
F
kL L F kL L
(1
)
where
1
L
and
2
L
are the spring lengths
A
D
,
BC
corresponding to the current value of the angle
q
.
These values can be computed from the triangles
A
OD
and
BOC
using the formulas
22
11 1 2 12 1
22
22 1 2 12 2
() 2 cos()
() 2 cos()
Lcccc
Lcccc
(2
)
where
22
111
cab
,
22
222
cab and
1
,
2
are expressed via the mechanism parameters
112
q
;
212
q
;
12 1 1 2 2
atan( / ) + atan( / )ab ab
.
The torques
111
M
Fh
,
222
M
Fh
created
by the forces
1
F
,
2
F
in the passive joint O can be
computed using the triangle area relations
11 12 1
sin( )Lh cc
,
22 12 2
sin( )Lh cc
of
A
OD
and
BOC
, which yield the following expressions
0
11111121
0
22222122
() (1 ( )) sin( )
() (1 ( )) sin( )
Mq k LL cc
Mq k LL cc
(3
)
where the difference in signs is caused by the
different direction of the torques generated by the
forces
1
F
,
2
F
with respect to the passive joint.
Further, taking into account the external torque
ext
M
applied to the moving platform, the static
equilibrium equation for the considered mechanism
can be written as follows
12
() ()+ 0
ext
Mq M q M
(4
)
Solving this equation we can get the rotation angle
0
q
corresponding to the control inputs
0
1
L
,
0
2
L
and the
external torque
ext
M
applied to the moving platform.
This equation is highly nonlinear and cannot be
solved analytically, so it is reasonable to apply the
numerical Newton technique, which leads to the
iterative scheme
1
() ()
kk k k
ext
qqMqMMq
(5
)
where
12
() () (), ( )
k
M
qMqMqMq dMqdq
.
Stiffness Analysis of a New Tensegrity Mechanism based on Planar Dual-triangles
403
3 STABILITY ANALYSIS OF A
SINGLE SEGMENT
Let us now evaluate the stability of the mechanism
under consideration, which shows its controllability
in relation to the external load. This property highly
depends on the equilibrium configuration defined by
the angle
q
satisfying the equilibrium equation
() 0
ext
Mq M
. As follows from the relevant
analysis, the function
()
M
q
can be either monotonic
or non-monotonic one, so the mechanism under study
may have multiple stable and unstable equilibriums,
which are studied in detail below.
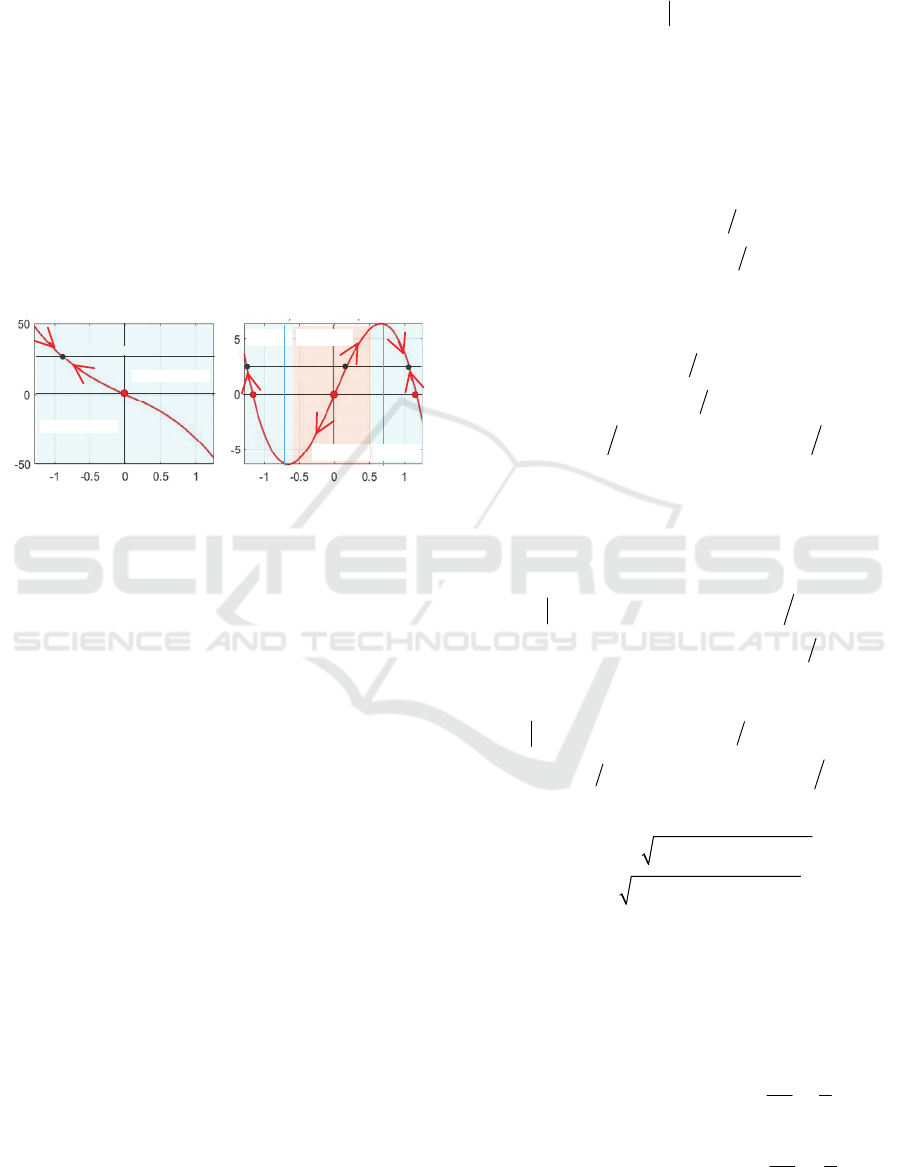
(a) monotonic case:
one equilibrium
-M
ext
stable area
stable area
(b) non-monotonic case:
three equilibriums
-M
ext
stable
area
q
q
untable
area
untable
area
Internal torque (N•m)
Internal torque (N•m)
stable
area
Figure 2: The torque-angle curves and equilibriums for
different combinations of mechanism parameters.
To analyse the mechanism equilibriums, let us
consider the torque-angle curves
12
() () ()
M
qMqMq
defined by Eq. 3 and presented
in Fig. 2. It is clear from Fig. 2a that for the monotonic
function
()
M
q
with negative derivative, the increase
of the external loading always leads to higher
mechanism resistance, so the equilibrium is unique
and stable. However, in the non-monotonic case,
while increasing the external loading, it is possible to
achieve a point where the mechanism does not resist
any more and suddenly changes its configuration as
shown in Fig. 2b. It is worth mentioning that similar
phenomenon can be observed in other mechanism and
is known in mechanics as “buckling” (Jones, R. M.).
Hence, in the non-monotonic case, there maybe three
solutions of the equilibrium equation (two stables and
one unstable).
As follows from the above presented figures, the
static equilibrium defined by angle
q is stable if and
only if the corresponding derivative
()
M
q
is
negative. However, taking into account possible
shapes of the torque-angle curves
()
M
q that can be
either monotonic or two-model one, the considered
stability condition can be simplified and reduced to
the derivative sign verification at the zero point only,
i.e.
0
0
q
Mq
(6
)
and it is easy to verify in practice. It should be noted
that here the derivative represent the mechanism
stiffness for the unloaded configuration.
To compute the desired derivative for any given
q
, it is convenient to represent the function
()
M
q
in
the following way
0
121 1 1 1 1
0
12 2 2 2 2 2
sin 1
sin 1
Mq cck L L
cc k L L
(7
)
This allows us to express the mechanism stiffness in
general case as follows
0
121 1 1
0
12 2 2 2
22 0 2 22 0
11
22
33
2
1211 1 122212221
1
1
cc kcos L
cc k cos L
cckLsin cck
Mq L
L
LLLsin
(8)
For the special cases, when
0q
and
12
q
(or
12
q
), the above expression is simplified
respectively to
22 2 0 0
12 12 11 22 12
00
12 12 1 2 1 2
3
12 12
0
()
q
ccsin kL kL
cccos k k
M
k
L
LLk
q
L
(9)
102
0
121 12 1 12
02202
12 2 2 1 2 1 2 11 2 2
3
11
21 2
1( ) 2 2
q
cc kcos L
cc k L c c
Mq L
LcckLsin
(10)
where
22
12121212
2cosLcccc
,
22
12212121
2cos22Lcccc
.
Let us also consider in detail the symmetrical
case, for which
12
aa
,
12
bb
,
12
cc
,
12
kk
,
00
12
LL
. In this case, we can omit some indices and
present the torque-angle relationship as well as the
stiffness expression in forms that are more compact
0
12
12
2 cos sin cos sin
22
q
Mq ckc q L
(11)
0
12
12
2 cos cos cos cos
22
q
ck c q LMq
(12)
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
404
Non-
monotonic
L
0
/b
q
q
(a)
L
0
/b
q
q
(b)
a/b
a/b
Non-
monotonic
Energy
Torque
Torque
Energy
Monotonic
Monotonic
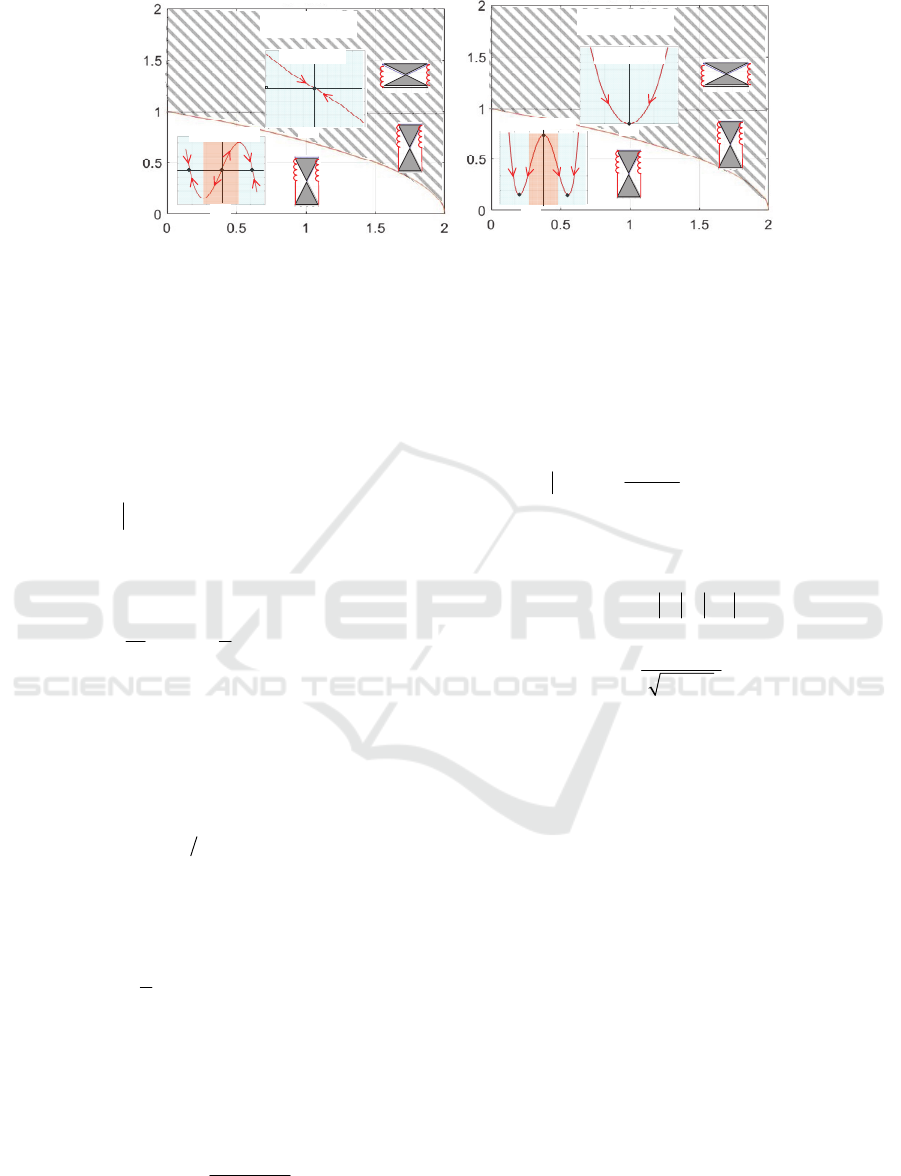
Figure 3: Stable and unstable regions of the parameter plane for unloaded equilibrium q = 0.
where the control input must satisfy the condition
0
02Lb
, as follows from the mechanism
geometry (Fig. 1). To distinguish the monotonic and
non-monotonic cases presented in Fig. 2, let us
compute the derivative for the unloaded equilibrium
configuration
0q
, which after simplification can
be expressed in the following way
0
22 0
2
q
kba LMq b
(13)
The latter allows us to present the condition (6) of
torque-angle curve monotonicity as
2
0
21
La
bb
(14)
and separate the parameter plane in two regions as
shown in Fig. 3a. As follows from this figure, the
unloaded equilibrium is always stable if
ab .
Otherwise, to have stable unloaded equilibrium, the
control input
12
oo
LL
should be higher than
2
21 ; 1,2
o
i
Lb ab i
The monotonic and non-monotonic cases are also
illustrated by Fig. 3b, which includes the energy
curves
2
2
0
1
1
() ()
2
i
i
E
qkLqL
as the function of the rotation angle q. As follows
from this figure, the energy
()
E
q has either a single
minimum
0q corresponding to a stable
equilibrium, or two symmetrical minima
0
22
2 arccos
2
e
Lb
q
ba
(15)
and a local maximum
0q
corresponding to two
stable equilibriums and one unstable equilibrium.
For the symmetrical case, where
00
12
LL
, let us
also compute the torques at the boundary points
12
q
12
0
2
2
2
2
2
() 2
q
abk
M
qLc
ab
ba
(16
)
which allows us to present the condition that in the
non-monotonic case the stable equilibriums are
located inside of the interval of feasible values of the
configuration variable
12e
q
:
2
0
2
22
2 ba
L
ba
(17
)
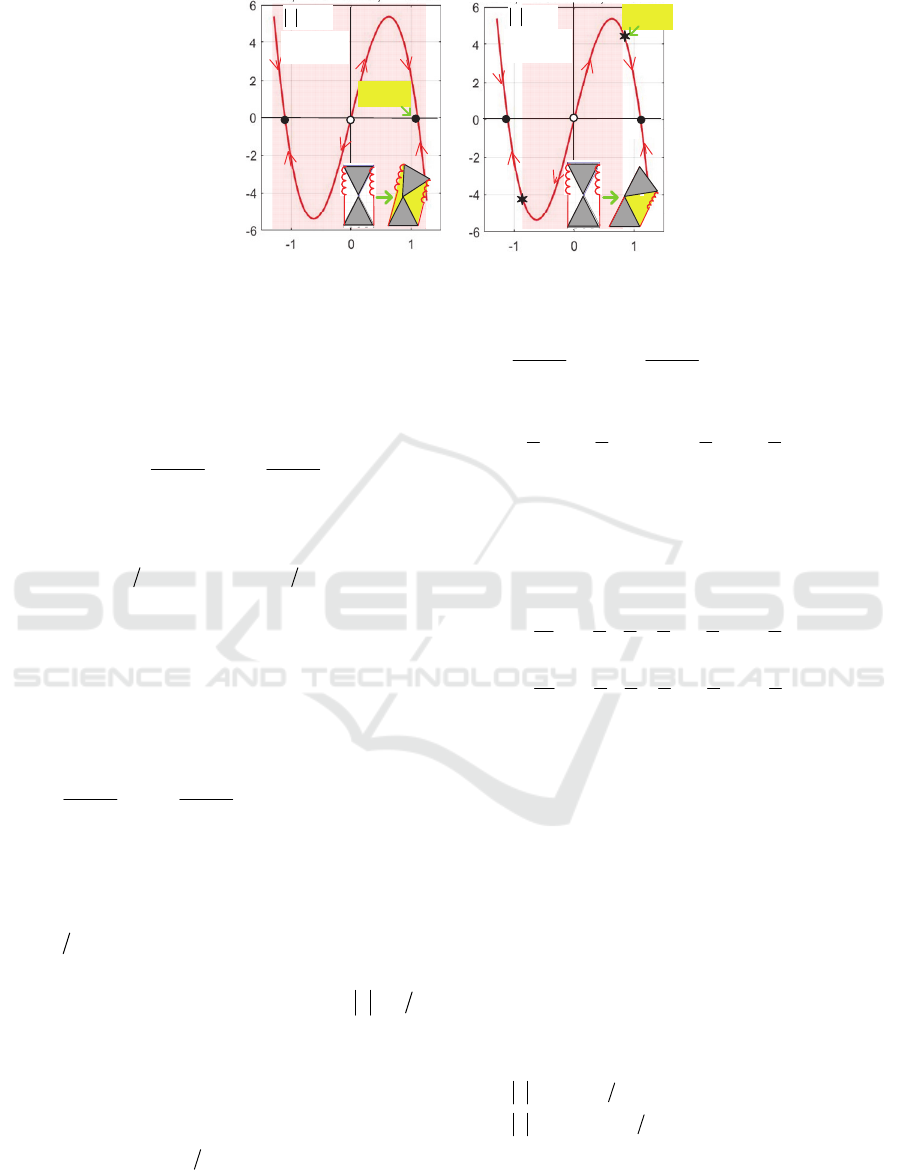
and allows user to estimate if the energy minimum is
achieved inside or on the border of the feasible region
of q. A physical interpretation of this equation is
shown in Fig. 4. where two cases are presented. In the
first case, the mechanism is unstable in the desired
configuration
0q
and jumps to one of two possible
stable configurations
12
q
that are located inside
of mechanical limits. In the second case, the
mechanism is also unstable in the equilibrium
configuration
0q
but it jumps to one of the
mechanical limits
12
q
(because the stable
configurations are out of the limits). So, a static error
appears in both cases, where q is equal to either
12
or
e
q
. For this reason, it is necessary to avoid in
practice the parameters combinations producing non-
monotonic torque-angle curves.
It is also useful to investigate the case when the
control inputs are not equal, i.e.
00
12
LL
, assuming
that they produce the desired stable configuration
Stiffness Analysis of a New Tensegrity Mechanism based on Planar Dual-triangles
405
qq
-
β
12
β
12
-
β
12
β
12
(a)
q
e
<
β
12
(
b
)
q
e
>
β
12
q
e
-q
e
q
e
-q
e
12
q
12
q
a/b=0.75
L
o
/b=0.8
a/b=0.75
L
o
/b=0.5
stop
position
stop
position
Internal torque (N
•
m)
Internal torque (N
•
m)
Figure 4: Location of stable “●” and unstable “o” equilibriums with respect to geometric boundary
12 12
,
.
with the output angle
0q
. In this case, the torque
and its derivative can be presented as follows.
2
12
00
12 12
12
2cossin
sin sin
22
Mq ck q
qq
ck L L
(18)
22
00 00
12 12
2cos
0.5 cos( 2)( ) sin( 2)( )
kb a q
kb q L a
M
Lq
q
L
L
(19)
where all notations are the same as in the above
expressions (7) and (8). It can be proved from the
equilibrium equation that the control inputs
0
1
L
,
0
2
L
insuring the desired output angle
q
must satisfy the
linear relation
00
12 12
12 12
sin sin 2 cos sin
22
qq
L
Lcq
(20)
which gives infinite set of control variables
00
12
,
L
L
that may correspond either to stable or unstable
equilibrium. To analyse sign of the derivative
()dM q dq
, let us consider separately two cases:
ab and ab . In the first case, when ab and
mechanism geometry impose the constraint
2q
, all three terms of (19) are negative, so the desired
equilibrium configuration
q
is stable.
In the second case, when
ab , the equilibrium
maybe either stable or unstable. Corresponding
separation curves can be found from the conditions
() 0Mq and
() 0dM q dq
, which yield the
following system of linear equations with respect to
0
1
L
,
0
2
L
00
12 12
1212
sin sin 2 cos sin
22
qq
L
Lc q
(21)
00
12
22
sin cos sin cos
22 22
4cos
qq qq
abLabL
ba q
(22)
whose solution allows us to present the stability
condition in the following form
0
33
1
0
33
2
2cossin
22
2cossin
22
L
ba a q q
babb
L
ba a q q
babb
(23
)
It is worth mentioning that in the case of
0q
the above expressions give the stability condition Eq.
23.
Hence, to achieve the desired configuration
q
it
is necessary to apply the control inputs
0
1
L
,
0
2
L
satisfying both the equilibrium condition Eq. 21 and
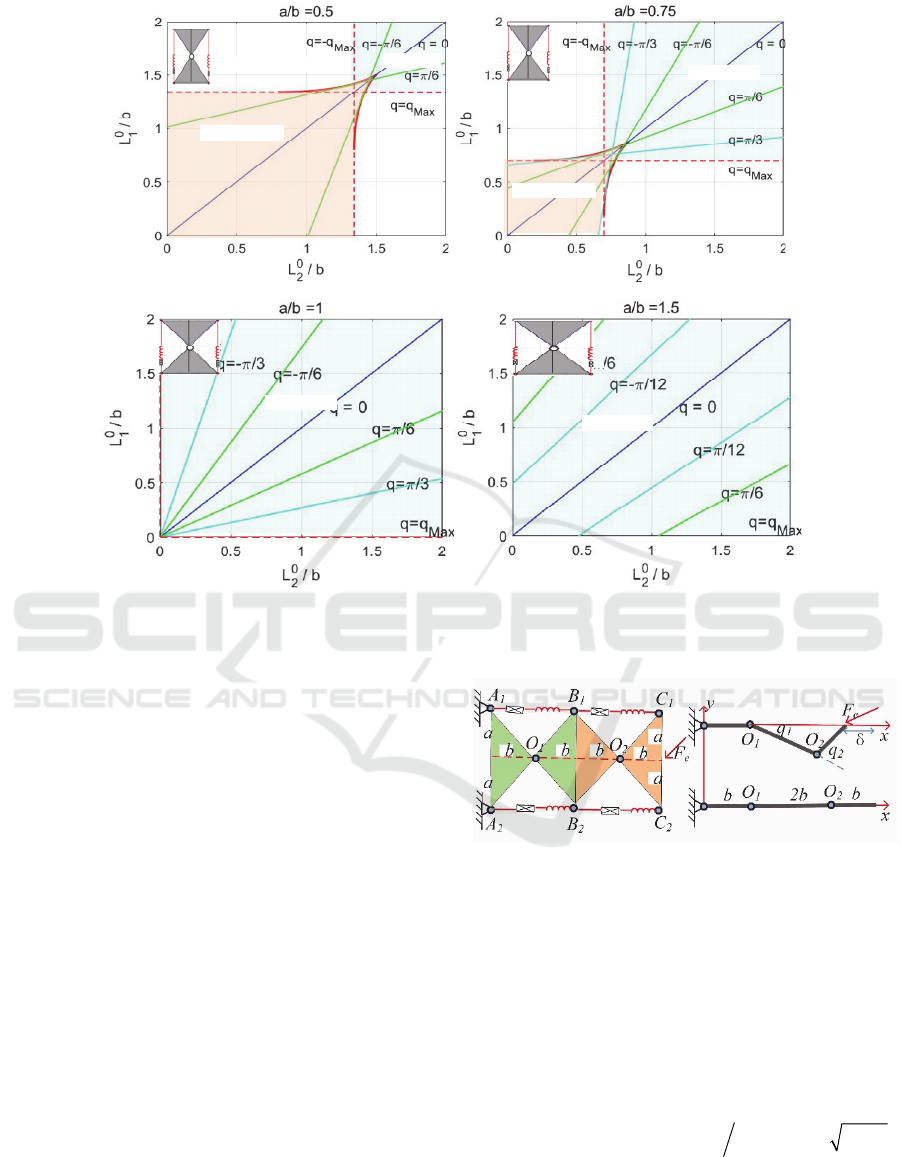
the stability conditions Eq. 22. Corresponding regions
of
0
1
L
,
0
2
L
are presented in Fig. 5, which clearly
shows for which combination of inputs the desired
configuration can be reached geometrically and it is
statically stable, and where the angle
q is
constrained by the geometry conditions:
2atan ,
2atan ,
qabab
qabab
(24)
which allows us to get the value of q
Max
in Fig. 5.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
406
stable
non-reachable
non-
reachable
unstable
stable
unstable
non-
reachable
non-reachable
(a)
(b)
stable
stable
q= -π/6
(c) (d)
Figure 5: Regions of equilibrium stability for different inputs
0
1
L
,
0
2
L
.
4 STABILITY ANALYSIS OF
TWO SEGMENTS
Let us consider now an aggregated mechanism
presented in Fig. 6, which is composed of two
segments considered in the previous section. It is
assumed that the left hand-side of the mechanism is
fixed and the desired configuration corresponds to the
“straight” shape with
12
0qq
that is achieved by
applying equal control inputs to all segments. Under
the influence of the external force
e
F
, the end-
effector moves to a new equilibrium with the end-
effector location
,4,
T
T
xy
xy b
and nonzero
configuration variables
12
,qq
. Let us evaluate the
mechanism resistance to the external force
e
F
for this
“straight” configuration expressed by the force-
deflection relation
(, )
ex y
F
.
If the end-effector deflection
(, )
x
y
is assumed
to be known, the configuration angles can be
computed from the triangle equations
Figure 6: The model of two segment mechanism.
112
112
24
2
x
y
bbCbC b
bS bS
(25
)
that can be solved using the technic used in the invers
kinematics of the two-link manipulator, which yields
122
222
atan2( , ) atan2 , 2
atan2 ,
qyxbbSbbC
qSC
(26
)
where
2
22 2
2
54Cxbybb
,
2
22
1SC
.
It is worth mentioning that two symmetrical solutions
are possible here and both of them are feasible. Then,
for each segment the torque generated by the elastic
virtual spring can be obtained by Eq. 12
Stiffness Analysis of a New Tensegrity Mechanism based on Planar Dual-triangles
407

22
2sinsin,1,2
2
o
i
ii
q
Mq k b a q bL i
(27)
And we can get the relation between the torque
i
M
q
and the external force
,
T
xy
FF
1
2
0
x
T
q
y
F
Mq
J
F
Mq
(28)
where
q
J
is the Jacobian matrix, which is written as
follows
112 1,2
112 1,2
2
2
q
bS bS bS
J
bC bC bC
,
,
(29)
and
11
cosCq
,
11
sinSq
,
12 1 2
cosCqq
,
12 1 2
sinSqq
. After substitution of the torques in
the equilibrium equation, we can find the external
force corresponding to the end-effector displacement
22
11
2
0
22
sin sin 2
2,0
sin sin 2
x
T
q
y
F
qq
ba
kJ q
F
qq
bL
(30)
allowing us to obtain the desired force-deflection
relation, which is presented in Fig. 7. These results
show that the mechanism stiffness under external
loading can be considered as nearly constant but the
quasi-linear force-deflection curve does not go
through the zero point. Also, the considered
mechanism possesses very specific particularity
leading to the buckling phenomenon when the
external force increases gradually and the mechanism
configuration angles suddenly change from zero to
non-zero values. To find the critical force for the
buckling, let us compute the limits of
,
x
y
FF
while
,(0,0)xy
. As follows from the mechanism
geometry, which include a triangle with edges size of
b
and
2b
, if the first angle
1
q
is small enough,
the second angle can be approximately expressed as
2
3q
. The later allows us to express the Jacobian
in the following form
02
3
q
b
J
bb
(31)
and rewrite equation (30) as
22
0
02 2
2
3332
T
x
y
F
b
ba
k
F
bb
bL
(32)
that gives us the desired critical force
0220
0
lim 5 2 3
xx
FF kbabLb
(33)
It should also be mentioned that the buckling
phenomenon occurs if
022
21
L
bab
, which in
the previous section was recognized as the boundary
condition separating the monotonic and non-
monotonic areas in Fig. 3 ( see in Eq. 15 ). Here, the
initial configuration is stable and it resists to the
external loading if
0
x
x
FF
. In contrast, if the
geometry satisfies the condition:
022
21
L
bab
as shown in Fig. 7c, the initial configuration is
unstable and the mechanism suddenly jumps from the
initial position to slightly different stable
equilibriums (even without external loading), which
can be treated as the “jumping” phenomenon.
To get the unloaded stiffness matrix of the
mechanism for the general case, let us assume that
12
,0qq
and the Jacobian is non-singular. This
assumption allows us to apply an expression derived
from the VJM method for the stiffness analysis of
serial robots
1
x
T
qqq
y
F
x
JKJ
F
y
(34
)
where the diagonal matrix
12
(, )
qqq
KdiagKK is
composed of the stiffness coefficient of virtual joint
described by Eq. 13. This allows us to compute the
unloaded stiffness matrix for the two-segment
mechanism for any given configuration. Let us
consider now the case when the end-effector is
located at the point
(, )
x
y
assuming that 0
y
.
Corresponding configuration angles
12
(, )qq
can be
computed from Eq. 26 and substituted further to the
stable equilibrium condition (Eq. 19) for each
segment of the mechanism. The latter also allows us
to find equivalent stiffness coefficients
qi i i
K
dM q dq of the virtual joints. Then, the
stiffness matrix of the two-segment mechanism can
be obtained from the VJM method and expressed as
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
408

a/b
L
0
/b
Parameter
plane
δ x
Internal
torque
δ x
a/b
L
0
/b
a
a
Parameter
plane
Fx
Fy
Internal
torque
Fx
Fy
b b
F
e
x
y
δx
x
a
a
b b
F
e
x
y
δx
x
stable
equilibrium
stable
equilibrium
buckling
buckling
(a) a/b=0.75 L
2
0
/b=1.1
(b) a/b=0.75 L
2
0
/b=0.9
force
δ
x
force
δ
x
δ
x
a/b
L
0
/b
Parameter
plane
a/b
L
0
/b
Parameter
plane
Internal
torque
δ
x
Fy
Fx
Fy
Fx
Internal
torque
stable
equilibrium
unstable
equilibrium
a
a
b b
F
e
x
y
δx
x
a
a
b b
F
e
x
y
δx
x
buckling
force
δ
x
force
δ
x
(c) a/b=0.75 L
2
0
/b=0.7 (d) a/b=1.1 L
2
0
/b=0.7
Figure 7: Force-deflection relations
xx
F
,
y
x
F
for different geometric parameters
,,
o
abL
.
1T
F
qqq
K
JKJ
(35)
where
F
xx Fxy
F
F
yx Fyy
KK
K
KK
(36)
Then, let us investigate variations of the
mechanism stiffness coefficients while the control
inputs
0
1i
L
and
0
2i
L
are different. Also, let us assume
that both of the sections are controlled by a single
input, i.e.
0
11
L
var
,
0
21
L
var
and
00
12 22
L
L
, which
lead to the desired linear displacement
(,0)
xy
var
. Corresponding simulation
results are presented in Fig. 8, they demonstrate that
the stiffness of the two-segment mechanism is very
sensitive to its configuration. In particular, the
mechanism stiffness is essentially reducing while the
deflection
x
is increasing.
It should be mentioned that, to have the stable
equilibrium configuration, both two segments of the
mechanism should satisfy the stability condition
presented in the previous section. The latter is
illustrated by Fig. 8c, where the right-hand side
section of the mechanism is stable (
2
0
q
K ), but the
left-hand side section is in unstable configuration (
1
0
q
K ). So the left hand side section moves until
being stopped by the angle constrain. This shows if
the control inputs (
00
12
,
ii
L
L
) location is across the cusp
of the parameter plan shown in Fig. 8c, the
mechanism will be unstable also.
5 CONCLUSIONS
The paper presents some results on the stiffness
analysis of a new type of tensegrity mechanism,
which is composed of rigid triangles connected by
passive joints. In contrast to conventional cable
driven mechanisms, here there are two length-
controllable elastic edges that can generate internal
preloading. So, the mechanism can change its
equilibrium configuration by adjusting the control
inputs length. Such design is very promising and
convenient for constructing a multi-section serial
Stiffness Analysis of a New Tensegrity Mechanism based on Planar Dual-triangles
409

K
Fxx
K
Fyx
stable
stable
L
1
o
/b
L
2
o
/b
Parameter
plane
a
b
x
y
δx
x
L
1
o
/b
L
2
o
/b
Parameter
plane
K
Fyx
K
Fxx
(a) a/b=0.75 L
2
0
/b=1.1
stiffness
stiffness
δ
x
δ
x
(b) a/b=0.75 L
2
0
/b=0.9
a
b
x
y
δx
x
stable
one section
stable only
L
2
o
/b
L
1
o
/b
Parameter
plane
a
b
x
y
δx
x
L
1
o
/b
L
2
o
/b
Parameter
plane
a
b
x
y
δx
x
K
Fxx
K
Fyx
K
Fxx
K
Fyx
unstable
(c) a/b=0.75 L
2
0
/b=0.7 (d) a/b=1.1 L
2
0
/b=0.7
stiffness
stiffness
δ
x
δ
x
Figure 8: Stiffness coefficients for different geometric parameters ( unloaded mode ).
structures with high flexibility, which are needed in
many modern robotic applications.
For one segment mechanism, the main attention
was paid to a symmetrical structure composed of
similar triangles. In particular, the case of equal
control inputs was investigated in detail and
analytical condition of equilibrium stability was
obtained, which allows user to select the control
inputs ensuring the mechanism controllability. The
relation between the external torque and the
deflection was also obtained allowing to find loaded
equilibriums. It was proved that depending on
parameters combinations, the actuation can lead to
either the desired mechanism configuration
(corresponding to a stable equilibrium) or undesired
configuration corresponding to shifted stable
equilibrium or joint limits. Besides, similar analysis
has been done for the case of non-equal control
inputs, and equivalent serial structure was proposed
where the passive joint was replaced by a virtual
actuated joint with variable stiffness. In future, these
results will be used for the stiffness analysis of multi-
section mechanisms that may demonstrate unusual
behaviour under static load and suddenly change its
configuration.
ACKNOWLEDGEMENTS
This work was supported by the China Scholarship
Council ( No. 201801810036 ).
REFERENCES
Rolf, M., & Steil, J. J. 2012. Constant curvature continuum
kinematics as fast approximate model for the Bionic
Handling Assistant. 2012 IEEE/RSJ International
Conference on Intelligent Robots and Systems
(pp. 3440-3446). IEEE.
Yang, Y., & Zhang, W. 2015. An elephant-trunk
manipulator with twisting flexional rods. 2015 IEEE
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
410

International Conference on Robotics and Biomimetics
(ROBIO) (pp. 13-18). IEEE.
Skelton, R. E., & de Oliveira, M. C. 2009. Tensegrity
systems (Vol. 1). New York: Springer.
Moored, K. W., Kemp, T. H., Houle, N. E., & Bart-Smith,
H. 2011. Analytical predictions, optimization, and
design of a tensegrity-based artificial pectoral fin.
International Journal of Solids and Structures, 48(22-
23), 3142-3159.
Duffy, J., Rooney, J., Knight, B., & Crane III, C. D. 2000.
A review of a family of self-deploying tensegrity
structures with elastic ties. Shock and Vibration Digest,
32(2), 100-106.
Arsenault, M., & Gosselin, C. M. 2006. Kinematic, static
and dynamic analysis of a planar 2-DOF tensegrity
mechanism. Mechanism and Machine Theory, 41(9),
1072-1089.
Furet, M., Lettl, M., & Wenger, P. 2018. Kinematic analysis
of planar tensegrity 2-X manipulators. International
Symposium on Advances in Robot Kinematics
(pp. 153-
160). Springer, Cham.
Furet, M., & Wenger, P. 2018. Workspace and cuspidality
analysis of a 2-X planar manipulator. IFToMM
Symposium on Mechanism Design for Robotics (pp.
110-117). Springer, Cham.
Arsenault, M., & Gosselin, C. M. 2006. Kinematic, static
and dynamic analysis of a planar 2-DOF tensegrity
mechanism. Mechanism and Machine Theory, 41(9),
1072-1089.
Wenger, P., & Chablat, D. 2018. Kinetostatic analysis and
solution classification of a planar tensegrity
mechanism.
Computational Kinematics (pp. 422-431).
Springer, Cham.
Moon, Y., Crane, C. D., & Roberts, R. G. 2012. Position
and force analysis of a planar tensegrity-based
compliant mechanism. Journal of Mechanisms and
Robotics
, 4(1).
Venkateswaran, S., Furet, M., Chablat, D., & Wenger, P.
2019. Design and analysis of a tensegrity mechanism
for a bio-inspired robot.
ASME 2019 International
Design Engineering Technical Conferences and
Computers and Information in Engineering
Conference
. American Society of Mechanical
Engineers Digital Collection.
Jones, R. M. (2006). Buckling of bars, plates, and shells.
Bull Ridge Corporation.
Stiffness Analysis of a New Tensegrity Mechanism based on Planar Dual-triangles
411
