
Domain Optimization for Hierarchical Planning based on Set-Theory
Bernd Kast
1 a
, Vincent Dietrich
1 b
, Sebastian Albrecht
1 c
, Wendelin Feiten
1 d
and Jianwei Zhang
2
1
Siemens AG, Corporate Technology, Otto-Hahn-Ring 6, 81739 Munich, Germany
2
University of Hamburg, Faculty of Mathematics, Informatics and Natural Sciences,
Vogt-K
¨
olln-Str. 30, 22527 Hamburg, Germany
Keywords:
Hierarchy, Planning, Autonomy, Robotic Assembly.
Abstract:
The design of planning domains for autonomous systems is a hard task, especially when different parties are
involved. We present a domain optimization algorithm for hierarchical planners that uses a set-based formu-
lation. Due to an automatic alignment we can compose models from different sources to a larger domain for
efficient planning. The combination of domain optimization and hierarchical planning can handle large scale
domains very efficiently. Our algorithm reduces the effects of the non-optimality that comes with the hierar-
chical approach. We demonstrate the scalability with a task and motion planning problem. In the scenario of
a robotic assembly with up to 62 parts and plan lengths of over 1000 steps the planning times are kept within
15 minutes. We show the execution of our plans on a real-world dual-robot setup.
1 INTRODUCTION
Robotic systems bring together hardware and soft-
ware components from different sources to solve a
specific task. Only for recurring tasks it is viable for
an engineer to compose the components and write or
parametrize algorithms to manage the different pieces
in a meaningful way.
However, even in an industrial environment, the
cost of setting up the system can easily exceed the
savings by the automated process. This is especially
true for smaller lot sizes or even lot size one pro-
duction. In order to address the automation of such
a highly flexible production, we need algorithms for
the composition of such systems and decision making
during their runtime.
The algorithms for decision making have to han-
dle a mixed problem, which is depicted in Figure 1
with continuous geometric and discrete properties,
like attachment status or grasps. These planning prob-
lems become large for non-trivial tasks which results
in unreasonable computation times due to the curse
of dimensionality. This can be handled with a hierar-
chical approach, as presented in (Kast et al., 2019b).
a
https://orcid.org/0000-0001-7838-3142
b
https://orcid.org/0000-0003-0568-9727
c
https://orcid.org/0000-0002-3647-4043
d
https://orcid.org/0000-0002-7593-6298
Figure 1: The core operations of the process: assembly,
screw, handover, and place. Each action is planned and ex-
ecuted with the hierarchical planner.
In an industrial environment several different parties.
such as integrators or component suppliers, with vary-
ing user roles are involved to define modules, objec-
tives, and available resources. It must be possible to
provide the planner with these different pieces of in-
formation in a modular way while each module might
implement its own modeling scheme. These differ-
ent styles of expressing the declarative and procedu-
ral knowledge should not affect the performance of
the online planning.
Kast, B., Dietrich, V., Albrecht, S., Feiten, W. and Zhang, J.
Domain Optimization for Hierarchical Planning based on Set-Theory.
DOI: 10.5220/0009823007590766
In Proceedings of the 17th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2020), pages 759-766
ISBN: 978-989-758-442-8
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
759

In this paper we propose a domain optimization al-
gorithm that aligns the models for efficient planning.
We can either apply this algorithm on-demand, prior
to the planning, or as an offline step. We rely on our
set-theoretic foundation to reformulate the declarative
and procedural knowledge of the domain without in-
fringing their validity. We analyze the performance
of the optimization in a simulated setup with 800 test
runs and tasks of varying lengths. The final experi-
ment is conducted on a real two-arm robotic system.
2 RELATED WORK
There are two strands in the literature that target do-
main optimization problems.
A recently very active branch are data-driven al-
gorithms, notably reinforcement learning approaches,
which optimize heuristics for a specific domain.
These methods show very good performances for
some easy to simulate problems, like board games
(Silver et al., 2016), (Silver et al., 2017) or com-
puter games (Mnih et al., 2013), (Vinyals et al., 2019).
However, application on real-world scenarios are still
difficult due to the limited data available. Attempts
to overcome this include large scale pick and place
setups with hundreds of robots (Kalashnikov et al.,
2018) and, due to the difficult nature of physics, hard
but rather short tasks (Xie et al., 2019).
In (Schmitt et al., 2019) reinforcement learning is
used in combination with an abstraction layer. This
layer allows eased simulation, ensures viability, like
collision-free movements, and provides an interface
for real-world execution that handles small devia-
tions. Still, training requires large datasets and pro-
cessing power. Additionally, the trained model is a
black box and thus hard to debug or transfer. In our
approach we rely on models and rules rather than sin-
gle data points that define the behavior of the resulting
system. The explicit representation enables introspec-
tion, which is a key feature during development and
for industrial environments. Additionally, less com-
putational power is needed for our approach. How-
ever, it lacks theoretical optimality and still requires
experts to program. In (N
¨
agele et al., 2018) another
approach, which relies on domain specific heuristics
is proposed. In this case, however, the heuristics are
computed online by analyzing the desired goal. Ge-
ometric interdependencies are broken up and the re-
sulting plan is executed in simulation.
Another strand of related work covers optimiza-
tion of modeled domains. In (Kang and Nnaji, 1993)
a scheme for aligned and manually designed domains
is elaborated. This, however, covers a single domain
only and brings in its benefits only when strictly fol-
lowed. In a real-world scenario different parties bring
in their modules, which are used for completely dif-
ferent problems as well, to compose the overall do-
main. Therefore, it is very hard to align everyone to
a common scheme. In our approach each party ful-
fills their user-role with the representation they pre-
fer. Just before planning, we harmonize the represen-
tations automatically.
For this type of optimization many algorithms that
operate on discrete, mainly PDDL domains have been
proposed. Two strands can be identified for algo-
rithms which either transform the problem to suite the
planner, or pick a planner, which can cope with the
characteristics of the original problem.
Portfolio planners, such as (Seipp et al., 2012),
(Katz et al., 2018) apply different planners with dif-
ferent heuristics on the domain and try to switch to the
most appropriate combination for the current problem
formulation.
In (Haslum et al., 2007), (Vallati et al., 2015) au-
tomated optimization algorithms for PDDL-domains
are proposed, which allow even non-experts to ap-
ply generic planning algorithms on general PDDL-
domains. In (Areces et al., 2014) a formalization for
an optimization scheme was found, that was formerly
applied manually on the domains. This even allows
an engineer to inspect the optimized formulation to
validate and further optimize it easily. However, it
comes with the difficulties and limitations of PDDL
to handle continuous domains.
3 APPROACH
Before we discuss our new domain optimization algo-
rithm, we highlight the properties of its set-theoretic
foundation, which was introduced in (Kast et al.,
2019a).
Our new algorithm is effective in combination
with a hierarchical planner only. We point out the rel-
evant properties of an example hierarchical planning
algorithm, which was proposed in (Kast et al., 2019b).
3.1 Declarative Knowledge
Following the line of (Kast et al., 2019a), we call el-
ements of the declarative knowledge concepts. For
us, a concept C is a subset of some concept base B
Γ
which is a set of instances that is not necessarily fi-
nite. Concepts with the same concept base B
Γ
belong
to the same concept class Γ. The partial order more-
detailed than M
Γ
between two concepts holds true if
each instance described by the first concept is also an
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
760

Figure 2: Either the Box is the main actor and the robot
only the supporting actor, thus every property is described
product-centric, or it is vice versa and the robot has proper-
ties that describe the objects in its grippers.
element of the second one. Properties that are com-
mon to a set of instances define composite concepts.
These properties in turn can be expressed by value
ranges or sets, which are concepts themselves:
C
∼
=
Π
r∈R
C
C
r
,
where C
r
with r ∈ R
C
are the sub-concepts and the
role set R
C
defines the composite structure.
Examples to this set-theoretic view, which we will
reconsider in subsection 3.4, are the concept bases of
Objects and Manipulators with exemplary concepts
of a box or a robotic arm.
The box with no property but an identifier can be
detailed by concepts that define dimensions or its po-
sition, like on the table, grasped by the robot with
even more-detailed concepts that specify continuous
positions relative to some coordinate system.
The concept of the robot is detailed by concepts
that specify it’s current position and state. Part of the
state is the content of the gripper, which can be and
object, like an instance of an box, or it is empty as
nothing is currently grasped.
This example shows that some phenomena can
equivalently be expressed by instances of concepts
with different basic types, e.g. a robot holding a box
or a box in a robot’s gripper as visualized in Figure 2.
3.2 Procedural Knowledge
Planning is all about actions, which are represented
by the procedural knowledge. Only the procedures
make the declarative knowledge useful. We call these
building blocks of planning and execution operators
π. They map between given instances of input con-
cepts to instances of output concepts:
π : Π
r
i
∈R
π,in
C
r
i
→ Π
r
j
∈R
π,out
C
r
j
,
where the sets R
π,in
and R
π,out
describe the roles of the
respective input and output concepts. The mapping
can either be specified explicitly by a formula or im-
plicitly by a black box of code, some library, or even
a simulated or real-world experiment.
A set of operators is more-detailed than another
operator
e
π, when a sequence or network
b
π of these
operators exists with matching, more detailed outputs
compared to the original operator and inputs, which
are either a subset of the original inputs or orthogonal
to all of them, i.e. have a different concept bases and
are therefore independent to each other:
∀r
i
∈ R
e
π,in
∃r
j
∈ R
b
π,in
: (
b
C
r
i
,
e
C
r
j
) ∈ M
Γ(
e
C
r
j
)
,
∀r
i
∈ R
e
π,out
∃r
j
∈ R
b
π,out
: (
b
C
r
i
,
e
C
r
j
) ∈ M
Γ(
e
C
r
j
)
,
and for all r
i
∈ R
e
π,in
holds:
|{r
j
∈ R
e
π,in
| Γ(
e
C
r
j
) ⊆ Γ(
e
C
r
i
)}|
= |{r
j
∈ R
b
π,in
| Γ(
b
C
r
j
) ⊆ Γ(
e
C
r
i
)}|.
The more-detailed operators can consider addi-
tional information and are in general more costly to
be applied as they implement a more comprehensive
simulation or even real-world execution to tell the out-
come of the action.
This partial ordering is later used by the hierarchi-
cal planner to define new sub-planning problems.
3.3 Hierarchical Planner
The hierarchical planner, which we proposed in (Kast
et al., 2019b), is a forward state space planner that can
handle domains with both, discrete and continuous
properties efficiently. The basic idea of the planner
is to divide the overall planning problem into small
subproblems repeatedly, such that the curse of dimen-
sionality can be alleviated. We do this by planning in
an abstract domain first. In this domain the goal can
be reached with a relatively small number of steps,
as the abstracted operators cover huge changes of the
state. Additionally, the branching factor is small due
to the smaller number of possible operators that can
be applied in that domain.
Once we found a solution on the coarse level, each
operator that was applied in this plan by itself de-
fines a new sub-planning problem with its inputs as
starting values and outputs as goals. The operators
that can be applied in this new, refined domain are
the more-detailed operators as described in subsec-
tion 3.2. We apply this process recursively to each
of the newly generated planning problems until there
Domain Optimization for Hierarchical Planning based on Set-Theory
761

Figure 3: Geometric representation of the connection between two sets. The dark blue plane segment depicts the concept base
for all objects (a) while the yellow plane represents the manipulators concept base all robots belong to (b). The intersection
is a sphere (green). The projection of the sphere to the box-segment would miss the light green volume (c). This is due
to a possibly empty list of grasped objects for the robot, which has no representation in the original box-set. Therefore,
our algorithm extends the box-plane with the light blue segment depicting the ”no object” set (d). After this extension, the
volume can either be projected on the combination of the two blue plane segments (e) or the robot plane (f). This enables a
reformulation of the planning domain.
is no further refinement for the operators. As the ab-
stracted domains and their planned solutions can only
be approximations of the real behavior, there can be
errors and unsolvable subtasks on any level. Our solu-
tion to avoid dependency on the downward refinement
property is backtracking, which means that plans on
the abstract level are dismissed and new sequences
to the goal are recalculated if a refinement fails. In
our system, execution is the final refinement and error
handling a case of backtracking.
Therefore the planning approach represents a
model predictive control scheme. Both execution and
error handling are first class citizens with our plan-
ning approach. Under optimal conditions, when the
coarse level is a good approximation to the behavior
of the real-world, our planning approach can scale lin-
early with the length of the task. This, however, holds
only true if the downward refinement property is al-
ways guaranteed. For a bad approximation the strat-
egy still grows exponentially as the full problem is
np-hard.
Additionally, our solutions are not necessarily op-
timal. It depends on the modeling of the coarse do-
mains to propose good intermediate goals for factor-
ization to have overall solutions close to the optimum.
This, however, can be a burden to the engineering, es-
pecially when different people model the levels of the
domain according to their respective user roles.
3.4 Optimization Algorithm
The key idea of our domain optimization algorithm
is to align the different levels of abstraction. This is
especially important, when engineers with differing
viewpoints on the problem, for example due to differ-
ent user roles, model different parts of the domain. As
described in subsection 3.3 the key to an efficient fac-
torization with our hierarchical planner are the inter-
mediate goals that arise from the abstract level plan.
Remember that we need a sequence of operators
on the refined level, which produces more detailed
instances than the coarser level. According to our
definition described in subsection 3.1, a concept, and
therefore an instance of that concept as well, cannot
be more-detailed than another, if their concept bases
differ.
Consider the example of the box and the robot
in subsection 3.1. Both can describe the same phe-
nomenon, but one from a product-centric view and the
other from an actor or tool-based angle. As they use
different concept bases, the robot with the box cannot
be a solution to the box in the gripper of the robot nor
of any of the abstractions of the box with the robot.
However, it is quite likely that the engineer model-
ing the coarse processing steps has a product-centric
view on the plant, while the person that designs the
cell with the robot or some other machining equip-
ment has a tool-based angle.
During planning the coarse level would define
intermediate goals, which are only reachable for
the refined domain, if box and robot are separated.
This causes additional steps to be planned and exe-
cuted, which results in solutions that are farther off
the optimal plan. To overcome this issue, we can
identify concepts C
∼
=
Π
r∈R
C
C
r
having a sub-concept
C
j
, j ∈ R
C
with a concept base matching our overall
goal, i.e. B
Γ
(C
j
) ⊆ B
Γ
(C
goal
). Then we reformulate
these concepts such that they have the same concept
base as the goal concept while the set that they rep-
resent is identical: Assume that C
j
∼
=
Π
r
j
∈R
C
j
C
r
j
then
define the reformulated concept by
C
0
:= Π
r
j
∈R
C
j
C
r
j
× Π
r∈R
C
\{ j}
C
r
.
This concept is isomorph to a subset of C
j
and thus
has the concept base B
Γ
(C
j
). This is the formal
description of the isomorphism described in subsec-
tion 3.1. With this transformation, which is depicted
in Figure 3, we can directly derive intermediate goals
and can successfully compare newly created instances
with our existing subset, as the concept bases match.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
762

Figure 4: Extension to Figure 1 of important actions. Picking of the assembled box, localization of objects, screw out from
the magazine and initial pick of the box.
However, this is only possible if all elements of
the concept can be expressed in the other concept
base, which is not always true. Consider the example
where one concept is a composite concept having an
array of another concept type as a sub-concept. For
our robot-box-example, the composite concept with
an array is the robot and elements in this array are
of type box. Then not all composite concepts with
the array can be expressed equivalently by the sub-
concept, because the array might be empty, i.e. the
robot’s gripper is empty.
Therefore, we cannot express some instances di-
rectly in the form of the first concept base. To over-
come this, we expand the first concept base with a set
which contains the empty set, i.e.
B
∗
Γ
:= B
Γ
(C
j
) ∪ {{
/
0}}.
Afterwards corresponding sub-concepts of all el-
ements of that extended concept base can have addi-
tional attributes:
C
0
:= {
/
0} × Π
r∈R
C
\{ j}
C
r
.
For example, a no-box-object can have the attribute
robot. This allows to cover empty arrays as well and
therefore include all relevant instances.
We then generated wrapping operators which re-
place the original ones that have optimizable input or
output concepts. They internally call the original op-
erators but change the type of the inputs and outputs,
such that the aligned and newly generated concepts
are returned. For a domain, which is optimized this
way, the intermediate goals defined by the abstract
layers for the refinement layers are relaxed, while the
specified overall goals remain firm. Therefore, the
overall result of the plan is the same for the original
and the optimized domain, while possibly less steps
are required for the optimized domain.
4 EXPERIMENT
In the real-world we conduct our experiment on a
dual arm robot with a total of 14 degrees of free-
dom. Each of the arms has a two-finger gripper and
a RGB-camera that is used to refine the object poses.
The workspace is observed with a stationary 3D cam-
era, which is used to estimate the objects starting lo-
cations. We use a cordless screwdriver which is re-
motely controlled.
The assembly scenario we use to analyze the per-
formance of our algorithm includes the mounting of
a lid to a box and the insertion of multiple screws to
join them. The relevant actions that need to take place
are depicted in Figure 1 and Figure 4. It is necessary
to refine the object positions with one of the wrist-
mounted cameras, before any interaction takes place,
which means prior to grasping or picking up screws.
Fastening the screws can only happen with the box
fixated in one gripper and the screwdriver actuated
with the other arm. The objects (screwdriver and box
with lid) can be placed on the table which can cre-
ate loops in the state space. The box can additionally
be handed over between the two arms to change the
relative orientation in the gripper.
We generate collision-free robot trajectories with
the constraint-based solver described in (Schmitt
et al., 2019). This allows for good reachability with
relatively few intermediate positions for motion plan-
ning.
The configuration of the perception system is
grounded on (Dietrich et al., 2018).
We can vary the number of screws that are inserted
to modify the difficulty of the task. The real box has
only four screw holes, which results in maximum of
six parts that can be assembled. In simulation we
added virtual screw holes such that we can examine
scalability of our approach for up to 62 pieces.
We analyze the performance of the optimization
algorithm on a domain that was first designed on an
abstract, discrete layer only and later extended with
the continuous layers. There are a total of 4 modeled
abstraction layers for the task at hand. They include
two completely abstract levels, with and without lo-
calization of parts, simulated and real-world execu-
tion. Only the first layer is workpiece centric, while
the others are robotic centric. The robot can local-
ize each object in its workspace, pick the box, place
it on the lid, localize the merged pieces again to pick
both up together. The other arm can then pick the
Domain Optimization for Hierarchical Planning based on Set-Theory
763
Pick
(Box)
Assemble
(Box, Lid)
Pick
(BoxLid)
Pick
(Screw
driver)
ScrewOut
(Magazine)
ScrewIn
(BoxLid)
Place
(Screw
driver)
Handover
(BoxLid)
Place
(BoxLid)
Frei verwendbar
Pick
(BoxLid)
Handover
(BoxLid)
Figure 5: Nominal sequence of actions for the assembly process. Localizations, which must be executed prior to each pick,
screw, or assemble are omitted in this graph, but must be added to the plan as those actions fail otherwise. Additional screws
require the repetition of the last actions actions of this sequence. For the optimized domain only the small loop with two
actions (and additional localizations) must be repeated. The original domain requires the execution of actions in the larger
loop, as the intermediate goal is more restrictive. This includes the placement of the screwdriver such that the handovers of
the box can be performed.
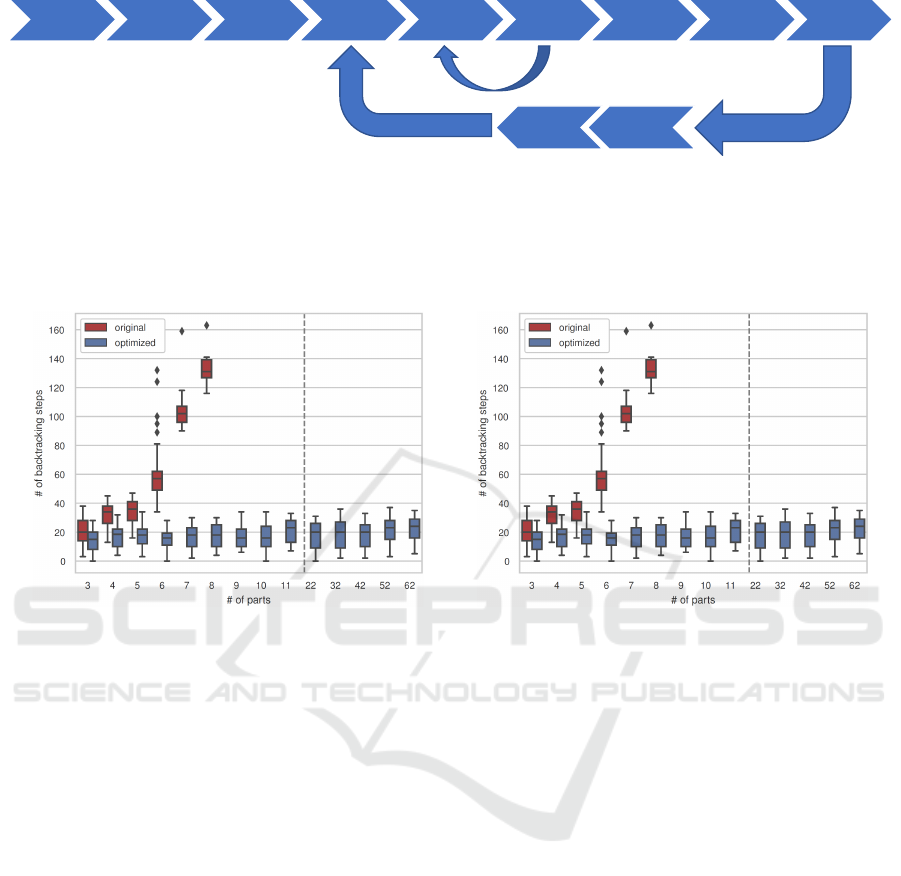
Figure 6: The number of steps in the successful solution for the task increases linearly. For the original domain more steps are
necessary per additional part. For the optimized domain the intermediate product is not placed and nevertheless recognized
as the interim step due to the reformulation. This is also reflected in the number of necessary backtracking steps shown on
the right figure. Both numbers go hand in hand, as shorter plans have less operations, that may fail during refinement. Please
notice the change in step size right of the dashed line.
screwdriver, pick up a screw from the magazine, and
insert it in the air to the box with lid as depicted in
Figure 4. In order to reach the intermediate goals in
the optimized domain, the arm with screwdriver can
localize the magazine right away and continue to pick
up screws from the magazine and fasten the lid with
them. For the original domain on the other hand, the
box must be separated from the robot after each in-
termediate step to fulfill the intermediate goals posed
by the coarse level. This means that the box must be
placed on the table. However, the box is grasped up-
side down to allow access for the screwdriver. There-
fore, no collision-free way to place the box upright
with a single arm exists. That means an additional
handover is needed, and the planner must find out that
the screwdriver must be placed to free the second arm
for that as highlighted in Figure 5. Afterwards the
box and the screwdriver must be localized again be-
fore the process can continue similar to the optimized
domain. In Figure 6 the resulting lengths of the suc-
cessful plans is depicted on the left hand side. We
can see that the plan lengths grow significantly faster
for the original domain due to the described process
of additional placements. We tested each domain 100
times with increasing number of screws and a noise
of 5 cm added to the initial object positions. The vari-
ance in plan lengths is a result of additional free-space
movements to reach the goal positions. On the right
hand side the number of necessary backtracking steps
is depicted. This number grows for the original do-
main faster as well, as the additional steps that need
to take place compared to the optimized domain add
further points of possible failure during refinement.
Therefore, not only the final plan length is shorter for
the optimized domain, but also the planning process
examines less dead ends during the search. This is
also reflected in the planning times. Figure 7 shows
the them for each of the domains for different num-
ber of parts. We can observe that the optimized do-
main scales almost linearly even for a huge number
of parts. The original domain performs good as well,
however it has a significantly faster increase in plan-
ning times compared to the optimized domain. Note
that even the original domain scales near linear, de-
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
764

3 4
5
6
7
8 9
# of parts
0
500
1000
1500
2000
2500
3000
planning time [s]
original
optimized
3 4
5
6
7
8 9 10 11 22 32 42 52 62
# of parts
0
200
400
600
800
1000
1200
1400
planning time [s]
original
optimized
Figure 7: Planning times for the original and optimized domain for a task with three to 8 parts that need to be assembled. We
can observe a near linear relationship between planning times and length of the task. However, the optimized domain scales
significantly better than the original domain. Please notice the change in step size right of the dashed line.
spite the very long plans of up to 300 steps. Non-
hierarchical planners would typically scale exponen-
tially with this plan length. The reason for this is that
the complexity is handled on the abstract levels of our
domain which results in very few calls to the very
expensive trajectory generation. The linear scaling
probably ends when the abstract planning problems
gains more weight on the overall planning times than
the problems on the refined levels which individually
stay constant in size.
5 CONCLUSIONS
In this paper we presented a novel optimization algo-
rithm for planning domains, that are represented in a
set-based formulation. We use a hierarchical planner
that makes use of this formulation and provides near
linear scalability for our problem at the cost of non-
optimal solutions. Poorly modeled domains naturally
result in costly and computationally expensive solu-
tions.
Our optimization approach reduces these effects
and therefore allows for an easy composition of dif-
ferent models to an overall planning domain. This
is an indispensable prerequisite for scalable industrial
autonomy and flexible manufacturing.
An alternative to this would be perfectly aligned
descriptions of each part of the overall domain. This,
however, can only be guaranteed in small demo sce-
narios, which are designed by a single person or a
small team. As soon as several groups or compa-
The presented research is financed by the TransFit
project which is funded by the German Federal Ministry of
Economics and Technology (BMWi), grant no. 50RA1701,
50RA1702, and 50RA1703.
nies bring in modules which enable easy integration
and alignment of the models must be enabled by algo-
rithms. An important advantage of the explicit model
of the domain compared to learned heuristics is the
ease to debug and ability to explain the behavior of
the algorithm.
REFERENCES
Areces, C. E., Bustos, F., Dominguez, M., and Hoffmann,
J. (2014). Optimizing planning domains by auto-
matic action schema splitting. In Twenty-Fourth In-
ternational Conference on Automated Planning and
Scheduling.
Dietrich, V., Kast, B., Schmitt, P., Albrecht, S., Fiegert, M.,
Feiten, W., and Beetz, M. (2018). Configuration of
perception systems via planning over factor graphs. In
2018 IEEE International Conference on Robotics and
Automation (ICRA), pages 1–7. IEEE.
Haslum, P., Botea, A., Helmert, M., Bonet, B., Koenig,
S., et al. (2007). Domain-independent construction of
pattern database heuristics for cost-optimal planning.
In AAAI, volume 7, pages 1007–1012.
Kalashnikov, D., Irpan, A., Pastor, P., Ibarz, J., Herzog, A.,
Jang, E., Quillen, D., Holly, E., Kalakrishnan, M.,
Vanhoucke, V., et al. (2018). Qt-opt: Scalable deep
reinforcement learning for vision-based robotic ma-
nipulation. arXiv preprint arXiv:1806.10293.
Kang, T.-S. and Nnaji, B. O. (1993). Feature representation
and classification for automatic process planning sys-
tems. Journal of manufacturing systems, 12(2):133–
145.
Kast, B., Albrecht, S., Feiten, W., and Zhang, J. (2019a).
Bridging the gap between semantics and control for
industry 4.0 and autonomous production. In Int. Conf.
on Automation Science and Engineering. IEEE.
Kast, B., Dietrich, V., Albrecht, S., Feiten, W., and Zhang,
J. (2019b). A hierarchical planner based on set-
theoretic models: Towards automating the automation
Domain Optimization for Hierarchical Planning based on Set-Theory
765

for autonomous systems. In Int. Conf. on Informatics
in Control, Automation and Robotics. SCITEPRESS
Digital Library.
Katz, M., Sohrabi, S., Samulowitz, H., and Sievers, S.
(2018). Delfi: Online planner selection for cost-
optimal planning. IPC-9 planner abstracts, pages 57–
64.
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., and Riedmiller, M.
(2013). Playing atari with deep reinforcement learn-
ing. arXiv preprint arXiv:1312.5602.
N
¨
agele, L., Schierl, A., Hoffmann, A., and Reif, W. (2018).
Automatic planning of manufacturing processes us-
ing spatial construction plan analysis and extensible
heuristic search. In ICINCO (2), pages 586–593.
Schmitt, P. S., Wirnshofer, F., Wurm, K. M., Wichert, G. V.,
and Burgard, W. (2019). Planning reactive manipu-
lation in dynamic environments. IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems
(IROS).
Seipp, J., Braun, M., Garimort, J., and Helmert, M. (2012).
Learning portfolios of automatically tuned planners.
In Twenty-Second International Conference on Auto-
mated Planning and Scheduling.
Silver, D., Huang, A., Maddison, C. J., Guez, A., Sifre, L.,
Van Den Driessche, G., Schrittwieser, J., Antonoglou,
I., Panneershelvam, V., Lanctot, M., et al. (2016).
Mastering the game of go with deep neural networks
and tree search. nature, 529(7587):484.
Silver, D., Schrittwieser, J., Simonyan, K., Antonoglou, I.,
Huang, A., Guez, A., Hubert, T., Baker, L., Lai, M.,
Bolton, A., et al. (2017). Mastering the game of go
without human knowledge. Nature, 550(7676):354–
359.
Vallati, M., Hutter, F., Chrpa, L., and McCluskey, T. L.
(2015). On the effective configuration of planning
domain models. In Twenty-Fourth International Joint
Conference on Artificial Intelligence.
Vinyals, O., Babuschkin, I., Czarnecki, W. M., Mathieu,
M., Dudzik, A., Chung, J., Choi, D. H., Powell, R.,
Ewalds, T., Georgiev, P., et al. (2019). Grandmas-
ter level in starcraft ii using multi-agent reinforcement
learning. Nature, 575(7782):350–354.
Xie, A., Ebert, F., Levine, S., and Finn, C. (2019). Impro-
visation through physical understanding: Using novel
objects as tools with visual foresight. arXiv preprint
arXiv:1904.05538.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
766
