
RTFM: Towards Understanding Source Code
using Natural Language Processing
Maximilian Galanis
a
, Vincent Dietrich
b
, Bernd Kast
c
and Michael Fiegert
d
Siemens AG, Corporate Technology, Otto-Hahn-Ring 6, 81739 Munich, Germany
Keywords:
Semantics-based Software Engineering, Information Extraction, Natural Language Processing, Planning.
Abstract:
The manual configuration of today’s autonomous systems for new tasks is becoming increasingly difficult due
to their complexity. One solution to this problem is to use planning algorithms that can automatically syn-
thesize suitable data processing pipelines for the task at hand and thus simplify the configuration. Planners
usually rely on models, which are created manually based on already existing methods. These methods are
often provided as part of domain specific code libraries. Therefore, using existing planners on new domains
requires the manual creation of models based on the methods provided by other libraries. To facilitate this,
we propose a system that generates an abstract semantic model from C++ libraries automatically. The neces-
sary information is extracted from the library using a combination of static source code analysis to analyze its
header files and natural language processing (NLP) to analyze its official documentation. We evaluate our ap-
proach on the perception domain with two popular libraries: HALCON and OpenCV. We also outline how the
extracted models can be used to configure data processing pipelines for the perception domain automatically
by using an existing planner.
1 INTRODUCTION
Autonomous systems are expected to adapt to chang-
ing tasks quickly. A good example for this are indus-
trial assembly tasks with small lot sizes. Such cases
demand robots that quickly adapt to new work pieces.
Unfortunately, the rapid reconfiguration of these com-
plex autonomous systems is infeasible when under-
taken manually. One solution to this problem is the
use of planning algorithms for automatic reconfigu-
ration. They can synthesize suitable data process-
ing pipelines automatically and, therefore, reduce the
needed engineering and time requirements to recon-
figure autonomous systems (Kast et al., 2018).
Planners usually require models that formalize the
description of the target domain. The algorithms and
data structures used in the models are often provided
by code libraries. These libraries are usually domain
specific and contain a wide variety of methods and
algorithms for their target domain. To add a new do-
main to the planning algorithm, it is therefore neces-
sary to model the algorithms and data structures used
in the library. However, such models are still created
a
https://orcid.org/0000-0001-8483-0535
b
https://orcid.org/0000-0003-0568-9727
c
https://orcid.org/0000-0001-7838-3142
d
https://orcid.org/0000-0002-6371-6394
manually. The main reason for this is that the needed
semantic information is often not explicitly described
as part of the source code. It is usually only described
in the documentation of the library, which engineers
can understand using their background knowledge.
Because understanding not only the source code but
also the documentation requires significant domain
knowledge, the creation of such models is a time con-
suming task.
We propose a system that can create an abstract
semantic model of a given C++ library automati-
cally. Our approach combines source code analy-
sis to extract the application programming interface
(API) with state-of-the-art natural language process-
ing (NLP) to understand the code documentation. The
source code analysis is used to provide a dependable
knowledge base, which can be augmented with addi-
tional information but never be falsified. We use this
knowledge base and extend it with semantic infor-
mation that is extracted from the official documenta-
tion. Our system creates semantic models of the func-
tions and data structures of the library. It is machine-
readable and represents a high-level abstraction of the
underlying source code. Thereby, the model elimi-
nates the need to understand and manipulate source
code, which has the potential to reduce the time and
engineering knowledge requirements. Our model rep-
resents the data structures of the library as concepts
430
Galanis, M., Dietrich, V., Kast, B. and Fiegert, M.
RTFM: Towards Understanding Source Code using Natural Language Processing.
DOI: 10.5220/0009826604300437
In Proceedings of the 17th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2020), pages 430-437
ISBN: 978-989-758-442-8
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

and the functions operating on these data structures
as operators (Kast et al., 2019). More generally, one
can also view operators as algorithms and concepts
as the (semantic) data structures the algorithms work
on. In practice, operators always have concepts as in-
puts and outputs, with which we model the function
parameters and return types.
Throughout this paper, we focus on the perception
domain for which excellent libraries, like HALCON
1
and OpenCV
2
exist. We demonstrate the applicability
of our approach by extracting models from both com-
puter vision libraries and outline how the extracted
model can be used to synthesize perception pipelines.
1.1 Problem Analysis
Extracting abstract semantic models from a C++ li-
brary and its documentation is a hard problem, as such
a system must adapt to varying documentation and
API styles. Therefore, we evaluated the differences
in both aspects for three perception libraries: HAL-
CON, OpenCV and the PCL
3
. The analysis shows
that the declaration of a function as the sole infor-
mation source is usually insufficient for the automatic
creation of an abstract model. Consider a function
that returns void and has a pointer as its parameter. In
this case, the C++ declaration provides no informa-
tion on whether this parameter is an input, an output
or both, of this function. While the const qualifier can
define parameters as unchanging and thus as inputs,
it is often not available. However, this information
is described as part of the function’s documentation.
Either with explicit labels, or as part of the natural
language description. Therefore, the source code but
especially its documentation provide additional meta
information about the functions, like whether a pa-
rameter is an input or an output.
To add semantic knowledge to the model, the pa-
rameter’s data type is important. Similarly to the in-
put/output information, knowledge about the seman-
tic content is contained in both the API and the doc-
umentation. A library could define a class Image,
which it uses to represent images. Unfortunately, it is
common to obfuscate this information by using wrap-
per classes that can contain a wide variety of data
types, like the HObject
4
class in HALCON. If this is
the case, only the documentation describes the seman-
tic type of a parameter. Similarly to before, this meta
information can either be encoded by explicit labels
in the documentation (e.g., in HALCON), or in the
1
https://www.mvtec.com/products/halcon
2
https://opencv.org
3
http://pointclouds.org/
4
https://www.mvtec.com/doc/halcon/1811/en/HObject.html
Table 1: Comparison of HALCON, OpenCV and the PCL
concerning their API and documentation. NL stands for nat-
ural language.
Library
Documentation HALCON OpenCV PCL
input/output explicit NL explicit
semantic type explicit NL NL
availability custom doxygen doxygen
API
data types obfuscated partly ob-
fuscated
explicit
const qualifier consistent inconsistent consistent
natural language description of the parameter (e.g., in
OpenCV).
Our findings are illustrated in Table 1. The com-
parison motivates a highly modular design to cope
with the heterogeneity in the design of both the API as
well as the official documentation of these libraries.
Furthermore, the examples of OpenCV and PCL il-
lustrate that it is necessary to understand the natural
language documentation in order to obtain, e.g., the
semantic types of parameters.
1.2 Contribution
In this paper, we make the following contributions:
(1) Proposal of an architecture for knowledge extrac-
tion with multiple information sources. (2) Evalua-
tion of the combination of source code analysis in
combination with state-of-the-art NLP methods on
the task of interpreting source code and its documen-
tation. (3) Demonstration of the applicability of a
fully functional model extraction system (MES) on
the HALCON and OpenCV libraries.
2 RELATED WORK
In this section, we discuss how NLP and informa-
tion extraction tools are currently used in the software
engineering field to extract information from meta
knowledge sources like the official documentation or
forum discussions.
Closely related to this work, is the trend in soft-
ware engineering to explore methods to interpret
source code and the corresponding natural language
documents. A good example of this is the work pre-
sented by (Zhang and Hou, 2013). They use seman-
tic analysis to extract negative mentions of API fea-
tures from forum discussions and then extract prob-
lematic API features. Another way to interpret natu-
ral language is presented by (Zhong et al., 2009) who
RTFM: Towards Understanding Source Code using Natural Language Processing
431

Step 2
Step 1
Step 3 Step 4 Step 5
Step 6 Step 7 Step 8
Exporter
Main Module
ASG
AutoWig
ASG reduced ASG
extended ASG
Parses all
headers of the
library and
creates an ASG
CodeGenerator Planner Interface
ASG ASG
Merger
NLPDoc
Merges the
information
extracted within
steps three four
and five
Generates the
source code for
each function
call
Converts the
ASG to models
for the planner
Interprets the
information
extracted by the
DocParser
extended ASG
Parses the
official
documentation
Applies
heuristics to
infer extra
information
from the ASG
DocParserHeaderParser
Filter
Filters out all
unneeded nodes
reduced ASG extended ASG
extended ASG
Figure 1: Overview of the different modules used in the harvester. Every block corresponds to a module of the harvester. The
structure of this system can be divided into three phases. Preprocessing (blue), knowledge acquisition (orange) and export
(green). Each phase is divided into several modules.
use NLP to infer resource specifications from natu-
ral language documentation. In their approach, they
map class methods to five predefined types of meth-
ods based on their associated description. To classify
the class methods into the categories, they use word-
level classification of the corresponding documenta-
tion based on Hidden Markov Models (HMMs) (Ra-
biner and Juang, 1986). Using these classes, they
can then detect bugs in source code by, e.g., detect-
ing that a manipulation method is called before a cre-
ation method. Another classification problem is ap-
proached by (LeClair et al., 2018), who attempt to
do a high-level classification of software projects into
predefined categories based on their source code. For
this, the authors use word embeddings that were pre-
trained to encode the similarity of high-level project
descriptions and low-level source code.
Probably most similar to our work is presented by
(Li et al., 2018). They tackle the API accessibility
issue by mining an API knowledge graph from mul-
tiple API sources (e.g., official documentation, API
tutorials) so that developers can be warned of possi-
ble caveats of the APIs before they run into problems.
To extract the API caveats from the documentation,
(Li et al., 2018) crawl the online API documenta-
tion and extract the textual description of the APIs.
Then, they construct an API skeleton graph from the
reference documentation by exploiting the provided
information like the fully qualified names of the en-
tities, inheritance information, data type references,
function/method return types, and function/method
parameter types. To extract the API caveat sen-
tences, a pattern-based approach (e.g., regular expres-
sions) was used. Finally, using co-reference reso-
lution, sentences containing API caveats are linked
to their corresponding API entity in the knowledge
graph. Their user study provides evidence that this
knowledge graph improves API caveat accessibility
among developers.
Like most research in the field of software engi-
neering, our approach focuses on the quest to reduce
the amount of work needed to build and maintain soft-
ware using program analysis and information extrac-
tion. However, unlike the existing research, which
tries to support the developer, the here presented sys-
tem goes further and explores ways to automate the
role of the software developer partially.
3 METHODOLOGY
Our MES is designed to be modular and expandable.
We achieve this by using the abstract semantic graph
(ASG) of the target library as our knowledge base
throughout the analysis. The ASG is extracted from
the header files of the target library using static source
code analysis and represents all the code components
that are part of the source as nodes and the semantic
relationships between the nodes as edges. Our sys-
tem is designed in such a way that all modules have
access to the current knowledge in the form of the
ASG. Any information that is extracted by the mod-
ules, like the extracted semantic value for each pa-
rameter or whether a parameter is an input or output,
is then added directly to the correct nodes in the ASG
themselves. Figure 1 illustrates this design and the
currently implemented modules.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
432

Out of the modules in the MES, the Exporter mod-
ule is unique in that it does not implement any func-
tionality itself, but acts as the main module and de-
fines the order in which the other modules are called.
Therefore, there are no architectural restrictions in the
order in which independent modules can be called.
Each module has access to all of the information that
was harvested so far. This also enables the creation
of custom pipelines for different target libraries. This
flexibility is fundamental because a fully generic so-
lution to the model extraction problem is not feasible
yet, as illustrated in subsection 1.1. The Exporter also
provides a default pipeline that is used for all follow-
ing experiments.
Parsing the Library and Filtering. First, we ob-
tain our knowledge base, the ASG of the target li-
brary. For this, we use the parser module of Au-
toWIG
5
(Fernique and Pradal, 2017), which inter-
nally uses Clang
6
to create one coherent ASG for the
header files of the target library. By using their parser
module instead of using Clang directly, we obtain an
ASG instead of the abstract syntax trees that Clang
produces. The decisive reason to rely on only the
header files for the source code analysis is that the full
source code is not necessarily available, as it is not
uncommon to only distribute a binary version. The
resulting ASG is then modified to include several ad-
ditional attributes. These additional attributes allow
us to store the information that is extracted in the fol-
lowing modules directly inside the correct nodes of
the ASG, which drastically simplifies the data han-
dling.
The next step is to decide which nodes in the ASG
should be processed. By default, the ASG includes
not only the code components of the given library but
also all code components of the library’s dependen-
cies, like the C++ standard library. Therefore, we fil-
ter the ASG to only include nodes of a given names-
pace, as it is common practice to have all user-facing
code components of a library in a unified namespace.
Applying Heuristics. After obtaining and filtering
the ASG, we try to extract the semantic knowledge
that is contained the ASG itself. As elaborated in
subsection 1.1, the source code (and thus the ASG)
can contain some semantic information about whether
function parameters are inputs or outputs. Therefore,
we extract this information with the HeaderParser
module, which analyzes both, the parameter quali-
fiers and their data types. This module then marks
all parameters or return values that are represented by
5
https://autowig.readthedocs.io/en/latest/index.html
6
https://clang.llvm.org/
fundamental types
7
, as well as all parameters that are
qualified with the const qualifier, as inputs. Like const
parameters, parameters of fundamental types are also
guaranteed to be inputs because they cannot contain
any pointers, references or classes.
Extracting and Analyzing the Documentation.
After extracting the semantic information of the
source code, our system proceeds to analyze the of-
ficial documentation of the target library. However, to
analyze the documentation it must be parsed first. For
this task, we use documentation specific parsers that
extract the natural language comments of the code
components that are contained in the provided ASG.
This is necessary as the documentation styles of dif-
ferent libraries varies significantly. After linking the
extracted comments to the corresponding nodes in the
ASG, there are several ways to analyze it. In the case
of HALCON, all the needed information
8
is already
explicitly stated in the documentation and thus parsed
directly by the DocParser and its custom heuristic.
Unfortunately, such a well-documented library is rare.
Therefore, we use NLP to analyze the documenta-
tion. In particular, we analyze the parameter com-
ments, as they contain the information about a param-
eter’s mode (input or output) as well as its semantic
content. To extract this knowledge, a pre-trained neu-
ral network that is based on the transformer architec-
ture (Vaswani et al., 2017), is used. This network is
then fine-tuned on two tasks: (1) Input/Output clas-
sification (I/O task). (2) Semantic type classification
(Sem type task). The trained network is then used
to classify the parameters and the resulting labels are
added to the corresponding node in the ASG.
Merging the Different Knowledge Sources. As
the last step during the knowledge extraction, we
merge the information from the different modules.
Consider the information whether a function param-
eter is an input or output. During the analysis in the
MES, several modules like the HeaderParser, or the
NLPDoc module might classify the parameter into in-
put and output. In case these information sources
contradict each other, a way to fuse both information
sources is needed. To accomplish this, the Merger
module uses a weighted majority vote to determine
the final result for each of the two classification tasks
given the results of several modules. This implemen-
7
In C++, this includes the boolean type as well as integer,
float and character types:
https://en.cppreference.com/w/cpp/language/types.
8
This includes whether a parameter is an input or output of
the function and the parameter’s semantic value.
RTFM: Towards Understanding Source Code using Natural Language Processing
433
tation was chosen to be flexible enough to allow for
additional modules that might be added in the future.
Generating the Source Code. Once the needed in-
formation is extracted and merged, the MES generates
the necessary glue code. This code is responsible for
calling the underlying function using the inputs pro-
vided by the input concepts of the operator as well as
passing the outputs of the function to the output con-
cepts. The CodeGenerator relies on cppyy (Lavrijsen
and Dutta, 2016)
9
to create Python bindings for the
underlying library automatically.
By using these bindings, the underlying C++ li-
brary can be called directly within Python, which sim-
plifies the code generation process.
Interface to the Planner. The last module of our
system is responsible for exporting the harvested in-
formation to the used planner. As mentioned be-
fore, our planner utilizes a bi-modal approach, which
splits the model into procedural knowledge (opera-
tors) and declarative knowledge (concepts). There-
fore, the last module interfaces with the existing plan-
ner (Kast et al., 2018) to create the necessary opera-
tors and concepts. If available, concepts are created
to reflect the semantic type of the data they hold. In
case no semantic type information was extracted, this
module falls back to using the data type of the param-
eter that is being processed. Because of the modular-
ity of our MES, the extracted information could also
be exported to other planners by adding an additional
planner interface.
4 EVALUATION
Automatically Synthesizing Operator Pipelines.
To showcase that the extracted models are suitable for
automatically synthesizing data processing pipelines,
our planner was presented with a select list of ex-
tracted models from the HALCON library, some start-
ing facts, and a goal
10
. Additionally, this experiment
motivates the extraction of semantic information dur-
ing the model extraction.
The initial inputs (facts) are two parameters and
an image, as illustrated in Figure 2. The goal of the
planner is then to find a suitable chain of operators
that produce the given goal, which, in this case, is an
9
https://cppyy.readthedocs.io/en/latest/
10
Facts and goals are specific instantiations of concepts. An
example of a specific instantiation of a concept is the
number 42, which is a specific instance of the concept
number.
HalconCpp TupleDeg
HalconCpp Threshold
HalconCpp Connection
HalconCpp GetImageSize
HalconCpp ReadImage
HalconCpp SelectShape
HalconCpp EllipticAxis
HalconCpp AreaHoles
number = 2.3
filename read = image path
number = 0
number = 128
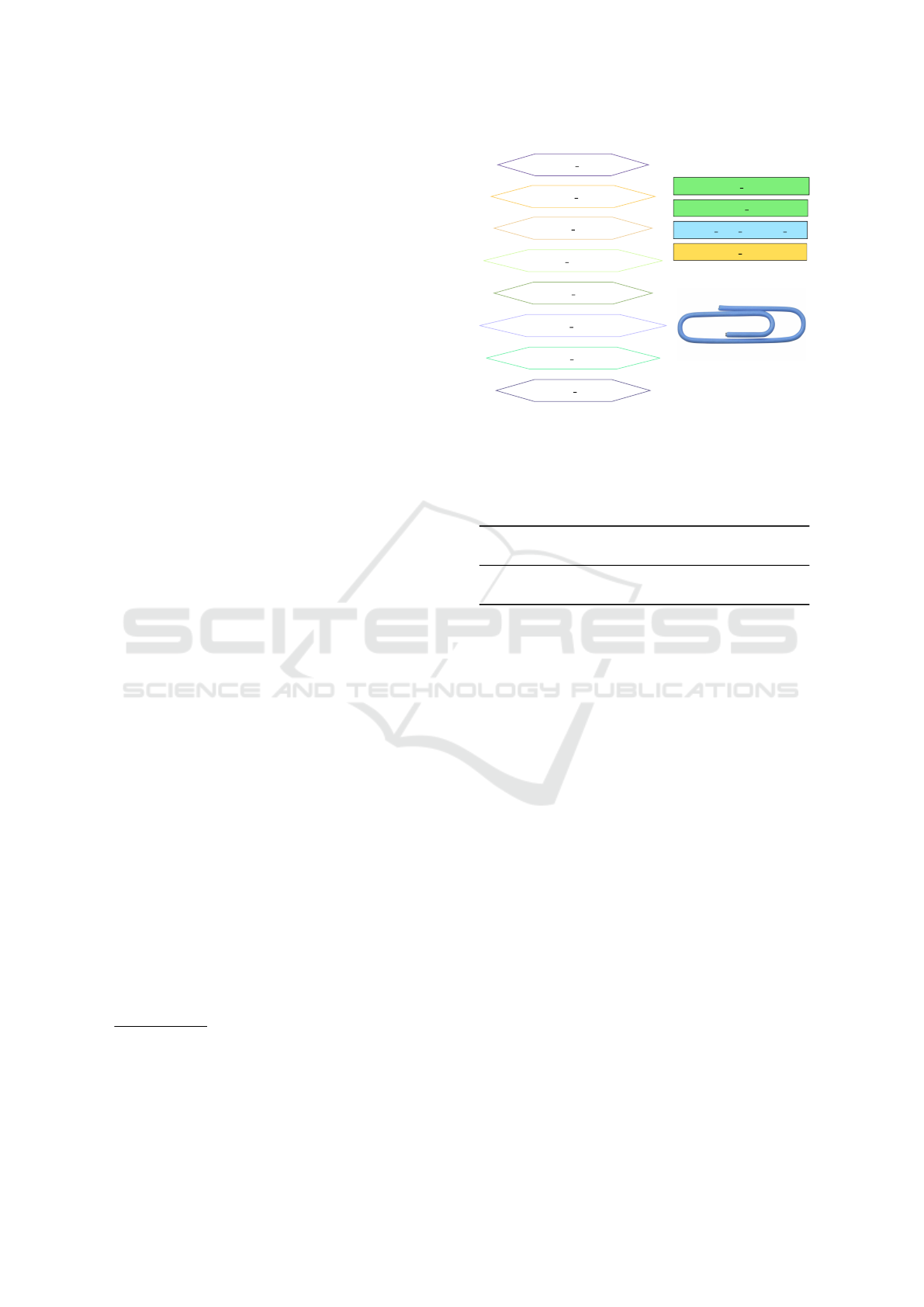
Figure 2: Initially available operators (hexagons) and in-
stances (green and blue) as well as the desired goal instance
(yellow). The given image path points to the depicted paper
clip.
Table 2: Planning performance with and without semantic
type information.
Semantic Informa-
tion
Visited Nodes Improvement
No semantic types 324
With semantic types 115 64.5 %
instance of the concept number with the value 2.3. In
this experiment, the paper clip in the input image is
rotated by 2.3 degrees. Thus, by solving this task, the
planner indirectly solves a range of problems - identi-
fying the angle of single objects in high contrast im-
ages. As illustrated in Figure 3, the planner is able to
find a suitable operator pipeline that solves the given
task. While the provided example is relatively simple,
this approach has been shown to scale to more com-
plex perception pipelines (Dietrich et al., 2018). It
has also been shown that the necessary fine-tuning of
parameters can be addressed with optimization based
approaches (Dietrich et al., 2019).
In their C++ interface, HALCON uses very few
data types, such as HObject and HTuple. How-
ever, our planner mainly evaluates the compatibility
of operators based on their input and output concepts.
HALCON’s API design, therefore, results in a vast
search space. As illustrated in Table 2, the additional
semantic information, which we extracted from HAL-
CON’s documentation drastically improves the plan-
ning performance. While the semantic type informa-
tion provided by explicit labels in HALCON’s docu-
mentation is valuable, this experiment also shows its
limits. Because the instance was labeled as a number
and could not be defined more precisely as e.g., an
angle in degrees, defining goals could be problematic
in more complex scenarios.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
434
HalconCpp Threshold
self = ”0”
HalconCpp ReadImage
self = ”961.092”
self = ”0.0402974”
self = ”364.321”
HalconCpp TupleDeg
RegionImage
self = ”2.30887”
HalconCpp EllipticAxis
self = ”klammer.jpg”
self = ”128”
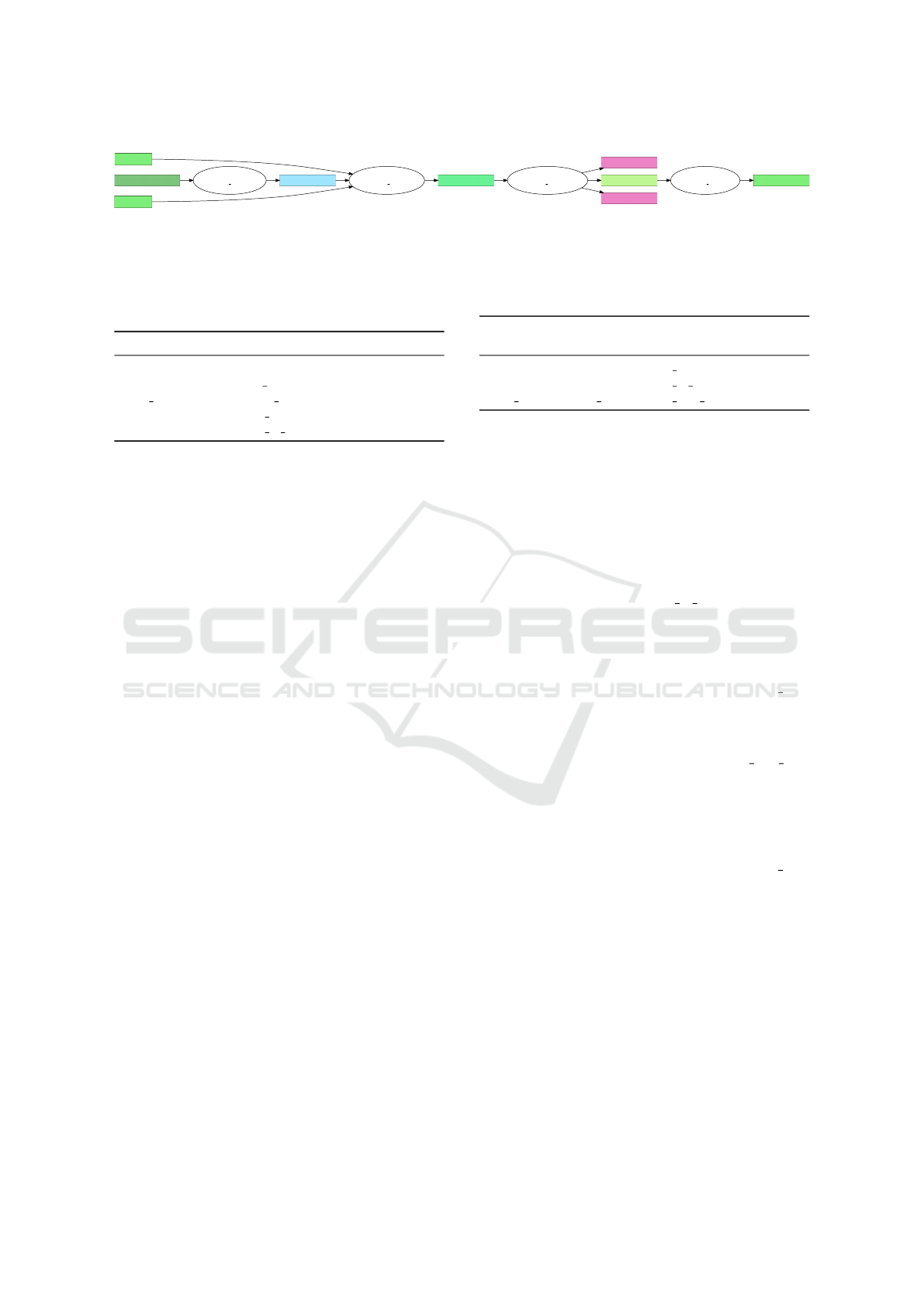
Figure 3: Data processing pipeline synthesized by the planner. Operators are illustrated as ovals, while concepts are illustrated
with rectangles. The content of the more complex concepts Image and Region is not displayed.
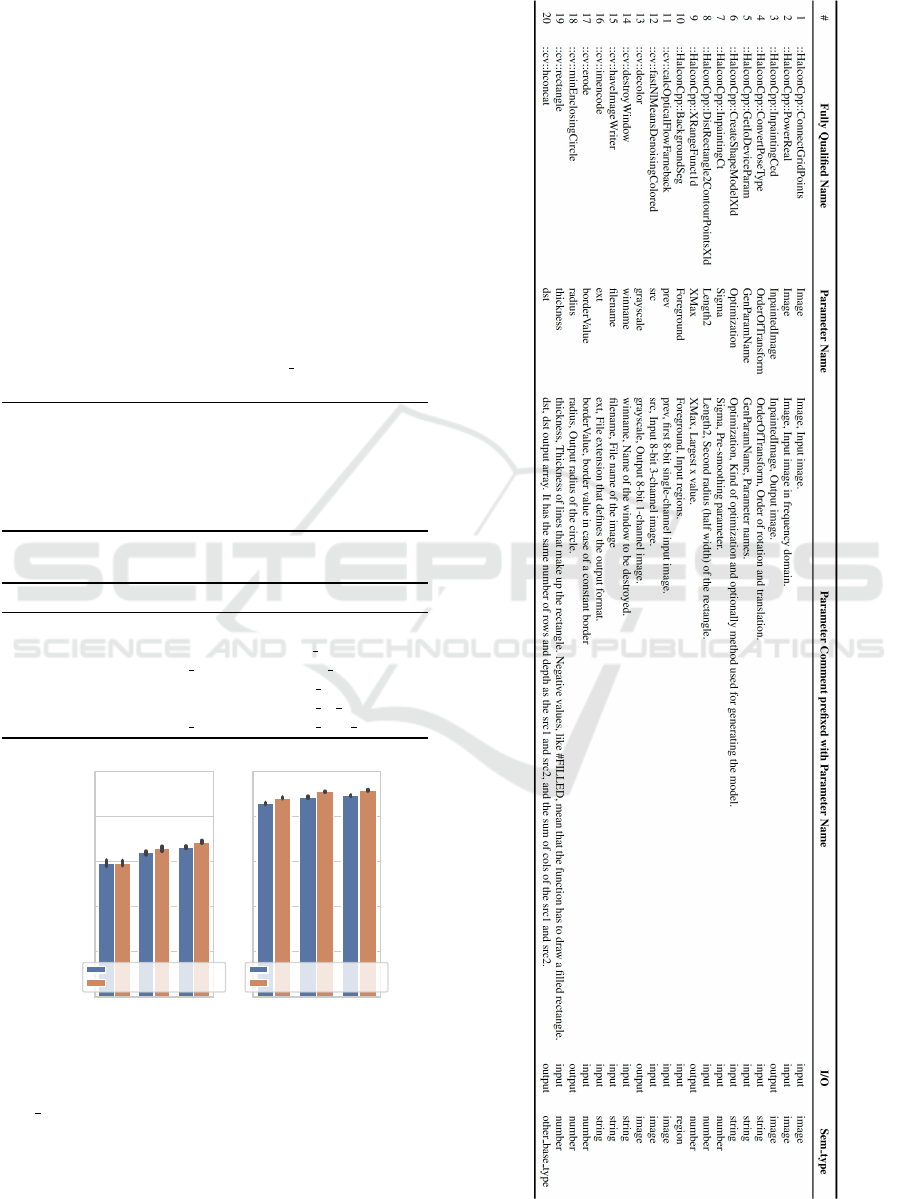
Table 3: Obtained NLP accuracy on the different tasks on
both libraries. All results are the average of 5 runs with
different seeds. Table 7 gives a brief overview of all used
datasets.
Task Dataset Accuracy
I/O io 87.2 %
I/O io balanced 84.2 %
Sem type sem type 89.6 %
I/O cv io 97.9 %
I/O cv io balanced 89.8 %
Natural Language Processing Results. Unfortu-
nately, only few libraries include machine-readable
labels in their documentation. Generally, it is neces-
sary to analyze the natural language comment that is
associated with the function parameters to obtain the
needed semantic information.
To be able to evaluate the contents and meaning
of the natural language comments, we use the SciB-
ERT (Beltagy et al., 2019) language model (LM).
We then fine-tuned separate SciBERT instances on
the two tasks for HALCON as well as OpenCV us-
ing the labeled data that is provided by HALCON’s
documentation and a manually labeled dataset for
OpenCV. For the I/O classification task, we provide
an additional balanced dataset for both libraries, in
which the samples of both classes are equally likely.
This is needed because the class input is much more
common in the I/O classification datasets. Table 8 il-
lustrates ten samples of our dataset for each library,
while Table 7 summarizes the used datasets. The sam-
ples of our dataset show that we use a combination
of the parameter comment and the parameter name
as the input to the LM. We found that this slightly
improves the classification performance of the fine-
tuned LM, as illustrated in Figure 4. Finally, we ap-
ply similar hyperparameters during our experiments
to the ones (Beltagy et al., 2019) use during their
evaluation. The most important hyperparameters are
listed in Table 6.
As illustrated in Table 3, using the combination
of the parameter comments and the parameter name
as features to classify the parameters yields promis-
ing results on both tasks. Even on balanced datasets,
the obtained accuracy only drops by a small margin,
which shows that the models indeed correctly learn to
discern the different classes.
Table 4: Performance of SciBERT (fine-tuned on HAL-
CON) on the OpenCV dataset. All results are the average
of 5 runs with different seeds.
Task Dataset
Train
Dataset
Eval
Accuracy
I/O io cv io 90.1 %
I/O io cv io balanced 84.2 %
Sem type sem type cv sem type 33.9 %
Transferring Knowledge. Creating a labeled
dataset for each new library that should be modeled
contradicts the basic thought of an automatic MES.
Therefore, we examine the performance of the LMs
that were fine-tuned on HALCON on OpenCV -
a new domain. The results of this evaluation are
illustrated in Table 4. The results show that the
model fine-tuned on the I/O classification task does
generalize well to this unseen library and achieves
a 84.2 % accuracy on the cv io balanced dataset.
This result is comparable to the accuracy this model
achieved in its training domain: HALCON.
Unfortunately, the classification of the parame-
ters into their semantic types does not perform as
well. While the model trained on the Sem type
task achieved 89.6 % in its training domain, it only
achieves 33.9 % on OpenCV, which is only barely bet-
ter than chance in this case. However, images are
classified correctly with 85.5 % in the cv sem type
dataset, suggesting that images are described simi-
larly, allowing the classifier to perform well for this
class.
The samples from the datasets illustrated in Ta-
ble 8 help to understand some of the problems con-
cerning the transfer performance of the Sem type
task. Consider the semantic type image. All of the
samples of this class contain the word image mak-
ing it easier to classify. This is the case for samples
in both libraries and might explain the good perfor-
mance the LM achieved for this particular class. For
the other classes, however, classification is more diffi-
cult, even for an experienced engineer. One example
for this is the semantic type string. The samples 6
and 16 in Table 8 are both strings but unlike the im-
age class, the samples do not share common words.
Additionally, both parameters could just as well be a
number to select pre-defined options in an enum given
the parameter comment.
RTFM: Towards Understanding Source Code using Natural Language Processing
435

Table 5: NLP performance after merging the information
from the HeaderParser module. All results are the average
of 5 runs with different seeds.
Task Dataset Train Dataset Eval Accuracy
I/O io cv io 93.2 %
I/O io cv io balanced 90.1 %
Performance after Merging. The I/O classification
task is special in that it has two knowledge sources
currently: the ASG, and the NLP analysis of the pa-
rameter comment. Thus, the knowledge from the
ASG can be merged with the result from the NLP
analysis. In the case of this experiment, the extra in-
formation is used to minimize the reliance on NLP.
The current implementation of the Merger module
uses following weights: (1) HeaderParser: 4 (2) Doc-
Parser: 2 (3) NLPDoc: 1 This means that NLP is only
used on parameters that could not be classified with
certainty by the HeaderParser module i.e., parame-
ters that are not qualified with the const qualifier and
are not a fundamental type. As shown in Table 5, this
method improves the final accuracy.
5 CONCLUSION
In this paper, we presented an approach to extract
abstract semantic models of C++ libraries automati-
cally, which we evaluated on the perception domain
with two popular computer vision libraries. We also
outlined how the extracted models of the percep-
tion libraries can be used within a planner to fur-
ther automate the creation of perception pipelines. It,
therefore, lowers the engineering barriers to develop
robotics and automation solutions that can adapt to
new tasks automatically via planning. Our approach
is based on the combination of static source code anal-
ysis and NLP, which is used to interpret the corre-
sponding documentation. Because we did not make
any domain specific assumptions, we expect our ap-
proach to perform similarly on other domains.
Our evaluation shows the benefits of additional se-
mantic information on the planning performance. The
required semantic information can be extracted with
a heuristics-based parser in case a machine-readable
documentation is provided (i.e., HALCON). More
generally, however, it is necessary to use NLP to ex-
tract semantic knowledge. Therefore, we fine-tuned
a state-of-the-art LM on two classification tasks to
extract semantic information. Our results show that
this approach works well in the training domain. Un-
fortunately, applying the trained model to another li-
brary showed mixed results. While it worked well for
the input/output classification task, the semantic type
classification task showed the limits of the used LM.
Future work could extend the here described static
analysis with dynamic program analysis to validate
the extracted labels. Additionally, an interesting re-
search direction would be to take more information
into account, like the other parameters of the func-
tion or the functions’ description. Finally, a more di-
verse training data set could improve the transfer per-
formance.
REFERENCES
Beltagy, I., Lo, K., and Cohan, A. (2019). SciBERT: A pre-
trained language model for scientific text. 2019 Con-
ference on Empirical Methods in Natural Language
Processing (EMNLP), arXiv:1903.10676.
Dietrich, V., Kast, B., Fiegert, M., Albrecht, S., and Beetz,
M. (2019). Automatic configuration of the structure
and parameterization of perception pipelines. In 2019
19th International Conference on Advanced Robotics
(ICAR), pages 312–319.
Dietrich, V., Kast, B., Schmitt, P., Albrecht, S., Fiegert, M.,
Feiten, W., and Beetz, M. (2018). Configuration of
perception systems via planning over factor graphs. In
2018 IEEE International Conference on Robotics and
Automation (ICRA), pages 6168–6174.
Fernique, P. and Pradal, C. (2017). AutoWIG: Auto-
matic generation of Python bindings for C++ libraries.
CoRR, abs/1705.11000.
Kast, B., Albrecht, S., Feiten, W., and Zhang, J. (2019).
Bridging the gap between semantics and control for
industry 4.0 and autonomous production. In 2019 15th
International Conference on Automation Science and
Engineering (CASE), pages 780–787.
Kast, B., Dietrich, V., Albrecht, S., Feiten, W., and Zhang, J.
(2018). A hierarchical planner based on set-theoretic
models: Towards automating the automation for au-
tonomous systems. In 16th International Conference
on Informatics in Control, Automation and Robotics
(ICINCO).
Lavrijsen, W. T. L. P. and Dutta, A. (2016). High-
performance Python-C++ bindings with pypy and
cling. In Proceedings of the 6th Workshop on
Python for High-Performance and Scientific Comput-
ing, pages 27–35.
LeClair, A., Eberhart, Z., and McMillan, C. (2018). Adapt-
ing neural text classification for improved software
categorization. In 2018 IEEE International Confer-
ence on Software Maintenance and Evolution (IC-
SME), pages 461–472.
Li, H., Li, S., Sun, J., Xing, Z., Peng, X., Liu, M., and
Zhao, X. (2018). Improving API caveats accessibil-
ity by mining API caveats knowledge graph. In 2018
IEEE International Conference on Software Mainte-
nance and Evolution (ICSME), pages 183–193.
Rabiner, L. and Juang, B. (1986). An introduction to hidden
markov models. IEEE ASSP Magazine, pages 4–16.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
436
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, Ł., and Polosukhin, I.
(2017). Attention is all you need. In Advances in
Neural Information Processing Systems (NIPS), pages
5998–6008.
Zhang, Y. and Hou, D. (2013). Extracting problematic API
features from forum discussions. In 2013 21st In-
ternational Conference on Program Comprehension
(ICPC), pages 142–151.
Zhong, H., Zhang, L., Xie, T., and Mei, H. (2009). In-
ferring resource specifications from natural language
API documentation. In 2009 IEEE/ACM Interna-
tional Conference on Automated Software Engineer-
ing (ASE), pages 307–318.
APPENDIX
Table 6: Hyperparameters used to fine-tune the SciBERT
language model on the I/O and Sem type classification
tasks.
Learning Rate 2 × 10
−5
Number of Epochs 3
Batch Size 32
Warmup Ratio 6 %
Weight Decay 0.0
Learning Rate Decay Linear
Table 7: Overview of the used datasets.
Library Task Dataset Name
HALCON
I/O io
I/O io balanced
Sem type sem type
OpenCV
I/O cv io
I/O cv io balanced
Sem type cv sem type
1 2 3
Number of Epochs
0.5
0.6
0.7
0.8
0.9
1.0
Accuracy
without parameter name
with parameter name
1 2 3
Number of Epochs
without parameter name
with parameter name
Figure 4: Illustration of the effects of adding the parame-
ter name to the parameter comment on the I/O (left) and
Sem type (right) classification tasks. Drawn with 95 % con-
fidence intervals on ten runs with varying seeds.
Table 8: Illustration of 10 samples from both the HALCON
and the OpenCV dataset.
RTFM: Towards Understanding Source Code using Natural Language Processing
437
