
Bridging the Reality Gap: Investigation of Deep Convolution Neural
Networks Ability to Learn from a Combination of
Real and Synthetic Data
Omar Gamal, Keshavraj Rameshbabu, Mohamed Imran and Hubert Roth
Institute of Automatic Control Engineering, University of Siegen, Hölderlinstraße 3, Siegen, Germany
Keywords: Reality Gap, Domain Transfer, Dataset Scarcity, Artificial Data, Convolution Neural Networks.
Abstract: Recent advances in data-driven approaches especially deep learning and its application on visual imagery
have drawn a lot of attention in recent years. The lack of training data, however, highly affects the model
accuracy and its ability to generalize to unseen scenarios. Simulators are emerging as a promising alternative
source of data, especially for vision-based applications. Nevertheless, they still lack the visual and physical
properties of the real world. Recent works have shown promising approaches to close the reality gap and
transfer the knowledge obtained in simulation to the real world. This paper investigates Convolution Neural
Networks (CNNs) ability to generalize and learn from a mixture of real and synthetic data to overcome dataset
scarcity and domain transfer problems. The evaluation results indicate that the CNN models trained with real
and simulation data generalize to both simulation and real environments. However, models trained with only
real or simulation data fails drastically when it is transferred to an unseen target environment. Furthermore,
the utilization of simulation data has improved model accuracy significantly.
1 INTRODUCTION
Deep Convolution Neural Networks (CNNs) uses
multiple layers to automatically learn the hierarchical
representation from the raw input data. This process,
however, requires a massive amount of training data
which in most cases is difficult to find, e.g. in medical
and education domains. The amount of data required
during training depends mainly on the network
complexity, type of data, existing gaps between data
samples, and whether we are training from scratch or
fine-tuning a pre-trained model (Tkacz, 2005).
The CNN models trained with a low amount of
data are very poor in terms of performance and cannot
generalize to unseen scenarios (Yu and Yali, 2011).
Fine-tuning of pre-trained models and usage of
synthetic data, i.e. data collected from simulators are
promising solutions for dataset scarcity. Simulators
can provide the domain with an infinite amount of
data samples, however, they do not have a perfect
representation of the real world in both visual and
physical properties (Bousmalis and Levine, 2017).
This creates a huge gap between both environments
which is often called the "reality gap". The reality gap
has been addressed by researchers in different works
and there exist several strategies for bridging the gap
between simulation and reality. One of the strategies
adopted is to develop high-quality simulators that
represent the real-world visual and physical
properties as close as possible. Furthermore,
rendering real-world images has shown significant
improvement in performance (Peng, Sun, Ali, and
Saenko, 2014; Stark, Goesele, and Schiele, 2010; Su,
Qi, Li, and Guibas, 2015).
Domain randomization is one of the recent and
promising techniques used to bridge the gap between
simulation and reality. Sadeghi and Levine (2016)
showed that training deep reinforcement learning
algorithms only on simulation data can generalize to
the real world by randomizing the simulation
environment. Similarly, Tobin et al. (2017) showed
that randomizing the simulation environment using
non-realistic textures can generalize a deep neural
network model to the real environment.
Retraining the CNN model from scratch or fine-
tuning a pre-trained model in the unseen target
environment has shown also a significant increase in
performance. For example, Tzeng, Hoffman, Zhang,
Saenko, and Darrell (2014) proposed a new CNN
model architecture with adaption layer and domain
446
Gamal, O., Rameshbabu, K., Imran, M. and Roth, H.
Bridging the Reality Gap: Investigation of Deep Convolution Neural Networks Ability to Learn from a Combination of Real and Synthetic Data.
DOI: 10.5220/0009830804460454
In Proceedings of the 17th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2020), pages 446-454
ISBN: 978-989-758-442-8
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
confusion loss to automatically learn meaningful and
domain invariant representations. Li, Wang, Shi, Liu,
and Hou (2016) presented an adaptive batch
normalization approach that ease model transfer to an
unseen target domain. A variety of other studies have
shown a significant increase in CNN model
performance when trained in the unseen target
environment (see, e.g., Duan, Xu, and Tsang, 2012;
Hoffman, et al., 2014; Kulis, Saenko, and Darrell,
2011; Yosinski, Clune, Bengio, and Lipson, 2014).
In robotics field, however, domain transfer is
rather difficult to apply, especially when vision
sensors are used to perceive the surrounding
environment. Only a few studies have examined
domain transfer in robotics and showed successful
results (see, e.g., Cutler, Walsh, and How, 2014;
James, Davison, and Johns, 2017; Loquercio, et al.,
2019; Tobin, et al., 2017; Yan, Frosio, Tyree, and
Kautz, 2017; Zhang, Leitner, Milford, and Corke,
2016). Therefore, there exist fewer approaches to
transfer the knowledge obtained in simulation to
reality (Sünderhauf et al., 2018).
To our knowledge, most of the research in the
robotics field employs either simulation or real data
but not a mixture of both. This paper investigates
Convolution Neural Networks (CNNs) ability to learn
from a mixture of real and artificial data when trained
from scratch and fine-tuned to fit the dataset classes
of the respective task. Each CNN model is trained six
times wherein each time a different combination of
the collected real and simulation datasets is used. The
learning ability of the trained CNN models is
evaluated using classification models metrics and
deployment of models frozen inference graphs in both
environments, i.e. real and simulation environments.
The work of Bayraktar, Yigit, and Boyraz (2019)
is the most similar to our idea, however, their focus is
mainly on object detection. The authors proposed
their own dataset ‘‘ADORESet’’ which includes 30
classes with 2500 real plus 750 artificial images per
class. In their experiments, they used the dataset to
fine-tune four different pre-trained models, however,
they did not consider training models from scratch.
Furthermore, they did not deploy the trained models
to real and simulation environments.
2 METHODOLOGY
In this work, we will investigate the ability of CNN
models to generalize and learn from a mixture of real
and artificial data to overcome dataset scarcity and
domain transfer problems. We will examine the
learning ability of CNN models when trained from
scratch and fine-tuned to fit the dataset classes of lane
following task. In lane following, the models are
trained to infer the steering angle and velocity
required to drive a Radio-controlled (RC) car model
kit autonomously on the track.
For dataset collection and inference stages, we
created physical and simulation environments for the
lane following task. The simulation environment is
created using the robot simulator CoppeliaSim and
made to be as close as possible to the physical
environment. To ease the dataset collection in both
environments we used computer vision to define the
centreline coordinates of the track and generate a path
from start to endpoint. We then utilized a geometric
path tracking system developed in an earlier project
(Gamal, Imran, Roth, and Wahrburg, 2020) to follow
the generated path. To localize the vehicle in the
environment the Apriltags ROS wrapper is used.
Figure 1 illustrates the geometric path tracking
system used for lane tracking task.
Figure 1: Geometric path tracking system.
To evaluate the learning ability of the CNN
models six datasets are created wherein four of them
33% of the dataset collected from the real-world
environment is kept fixed based on the assumption
that we have a very limited dataset. In these four
datasets, the number of incorporated simulation data
samples is varied. More specifically, each CNN
model will be trained for six times wherein each time
the dataset is changed as follows; 0% real word data
+ 100% of simulation data, 100% real-world data +
0% simulation data, 33% real-world data + 0%
simulation data, 33% real-world data + 33%
simulation data, 33% real-world data + 66%
simulation data, and finally 33% real-world data +
100% simulation data. To measure the models'
performance and their learning ability classification
models evaluation metrics are used. Furthermore, the
frozen inference graphs of the models trained with all
datasets combinations are deployed on both
environments, i.e. simulation and real-world
environments.
Bridging the Reality Gap: Investigation of Deep Convolution Neural Networks Ability to Learn from a Combination of Real and Synthetic
Data
447

3 SYSTEM SETUP
In this section, we will discuss the procedure followed
to setup the physical and simulation environments for
lane tracking task. Furthermore, we will introduce the
platform used in the real-world environment for
dataset collection and CNN models’ inference.
3.1 Test Platform
The test platform is an RC car model kit with
Ackerman steering mechanism, see Figure 2-b.
Figure 2: (a) Vehicle control system (b) Test platform.
The platform features a DC motor belt drive
system and a servo motor for controlling the steering
angle. The servo motor angle ranges from 0° to 180 °
however it is restricted with Ackerman steering
mechanism range. A 90° steering angle steers the
front wheels to face forward direction, an angle below
90° steers it to the right and above 90° to the left.
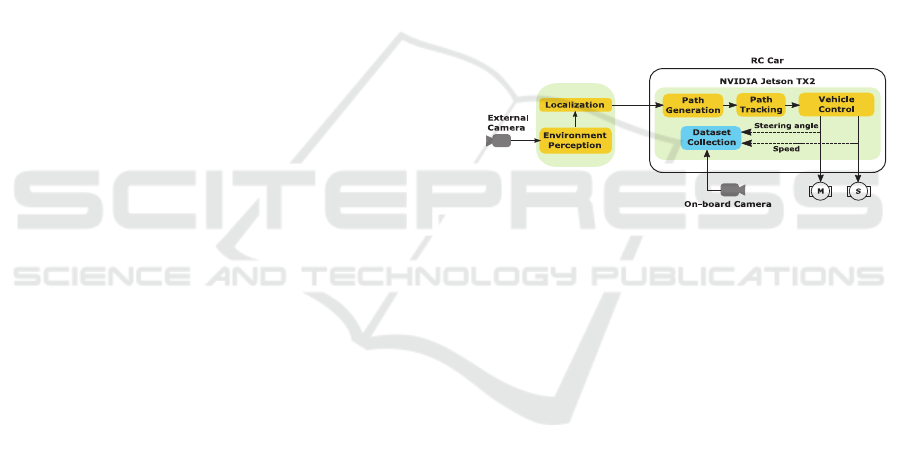
Figure 2-a illustrates the vehicle control system where
the low-level controller (Arduino Mega 2560 board)
is used for sensor data collection, motors control, and
bidirectional communication with the high-level
controller. The high-level control is the robot’s
onboard computer (NVIDIA Jetson TX2 developer
kit). It is used for high processing tasks (e.g. CNN
models’ deployment) and to provide an interface with
sensors and hardware components, whose data
transmissions standards are found difficult to be
handled by the Arduino microcontroller.
Furthermore, the car is equipped with a Logitech
C920 webcam for dataset collection and CNN
models’ inference. The camera is placed facing the
heading direction of the vehicle and tilted with an
angle of 70° to keep the focus on the region of
interest, i.e. track lanes.
3.2 Test Environments
As stated earlier two test environments are setup for
dataset collection and CNN models’ inference. These
are real and simulation environments. In the next
subsections, we will discuss the procedures followed
to setup both environments.
3.2.1 Real Environment Setup
To prepare the lane track, we used black carton sheets
and white tape to mark the track lanes. Figure 3
depicts physical environments setup.
Figure 3: Lane tracking environment.
The ROS wrapper of the AprilTag 3 system is
used for localizing the vehicle in the environment
using external Logitech C920 webcam. The pose of
all April tags present in the field of view of the camera
is tracked by the tf ROS package which allows us to
get the transform between any two coordinate frames
in the system transformation tree. The position and
orientation of the detected tag are fed to the geometric
path tracking algorithm to infer the required vehicle
speed and steering angle to drive the vehicle
autonomously on the generated path.
3.2.2 Simulation Environment Setup
The robot simulator CoppeliaSim formally known as
V-REP is used to create the lane tracking simulation
environment. The car model used in the robot
simulator is a simple Ackermann Steering model
provided by CoppeliaSim, which is similar to the test
platform used in this work. A vision camera is placed
on top of the model for dataset collection and CNN
models’ inference.
To add a new environment in CoppeliaSim, a
Unified Robot Description Format (URDF) model of
the environment is required. We used Solidworks to
model the environment and sw_urdf_exporter add-in
to convert the environment model into URDF model
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
448
format. Figures 4 illustrates the lane tracking
simulation environment.
Figure 4: Lane tracking simulation environment.
The CoppeliaSim platform provides dummy
objects to track the position and orientation of the
robot within the simulation environment. In the lane
following simulation environment, we used three
dummy objects to define the vehicle position, start,
and endpoints on the track. To use the same lane
tracking algorithms in the simulation environment we
used CoppeliaSim remote API to establish a
communication channel between CoppeliaSim and
our External client application, i.e. Python scripts.
4 CNN MODELS DESIGN AND
TRAINING
To investigate the learning ability of Convolution
Neural Networks two models are evaluated where the
first is trained from scratch and the second is fine-
tuned to fit the dataset classes of the lane tracking
task. To train these models two datasets are collected;
namely simulation and real-world datasets.
In the next subsections, we will discuss the dataset
collection and CNN model architecture design and
training.
4.1 CNN Model Architecture
The chosen CNN model architecture was designed in
one of our earlier projects related to lane tracking
which makes it an ideal candidate for our study. The
network architecture was inspired by different CNN
model architectures such as the Inception model by
Szegedy et al. (2015) and Network In Network
structure by Lin, Chen, and Yan (2013). Figure 5
illustrates the pre-trained model architecture. The
network model has 126,058 trainable parameters and
takes an input image of size (320 X 240 X 3). It
consists of six convolution layers, four Maxpooling
layers, one dropout layer, flatten layer, and two fully
connected layers. The first convolution layer consists
of 64 kernels of size 11X11 with stride 4X4 and
followed by a Maxpooling layer with a pool size of 2
X 2. The second convolution layer has 128 kernels of
size 7X7 with stride 2X2 and followed by a
Maxpooling layer with a pool size of 2 X 2. The Max-
pooling layer is then followed by two inception
modules with different kernel sizes. These are 5x5,
3x3, and 3X3, 1X1 respectively. Following this, a
Maxpooling layer and one additional inception
module with a kernel size of 1x1 combined with
average pooling. Finally, we have a network in
network and two fully connected layers.
4.2 Dataset Collection and Preparation
In lane following, the steering angle range used is 80°
to 100° and divided into 3 classes. The chosen range
will ensure that the vehicle doesn’t deviate from the
center of the track because of the small field of view
of the camera. Owing to the large weight that the RC
Car carries, the speed of the vehicle is kept fixed at
100% throttle value ‘‘full speed’’ so that the DC
motor is able to drive the vehicle. Table 1 illustrates
the dataset class labels of the lane following task
where F means forward and S stop.
Table 1: Lane tracking dataset class labels.
No. Class Turning Angle Velocity
0 80F100 80 100%
1 90F100 90 100%
2 100F100 100 100%
3 090S000 0 100%
Figure 5: Lane tracking CNN model architecture.
Bridging the Reality Gap: Investigation of Deep Convolution Neural Networks Ability to Learn from a Combination of Real and Synthetic
Data
449
In dataset collection, the geometric path tracking
system is used to drive the car autonomously in both
simulation and real environments and simultaneously
collects, labels, and store the data. Two datasets are
created, i.e. real and simulation datasets where each
contains around 30,000 labeled images. Figures 6
illustrates the number of images collected per class in
both environments.
Figure 6: Dataset collected for the lane tracking task.
4.3 CNN Models Training and Fine
Tuning
As mentioned earlier the two CNN models will be
trained for six times wherein each the dataset is
changed as follows:
a) 0% real word data + 100% simulation data
b) 100% real-world data + 0% simulation data
c) 33% real-world data + 0% simulation data
d) 33% real-world data + 33% simulation data
e) 33% real-world data + 66% simulation data
f) 33% real-world data + 100% simulation data
The datasets are further divided into training and
validation datasets. The training and validation
datasets percentage are chosen to be 90% and 10% of
the original dataset respectively. The CNN model
used in this work is a pre-trained model with ten
classes. The model will be fine-tuned to fit the four
classes of the lane tracking task. To fine-tune the
model, we truncated the last fully connected layer of
the pre-trained network and replaced it with our own
fully connected layer with four units and softmax
activation. To train the same CNN model from
scratch the complete model parameters are randomly
initialized and trained to find the optimal parameter
set that maps the inputs to their associated targets.
The networks are trained using Adam optimizer
and binary cross-entropy loss function. The batch size
used for training is 32 and the learning rate is 0.001.
During the training phase, we used model
checkpoints to continually save the model along with
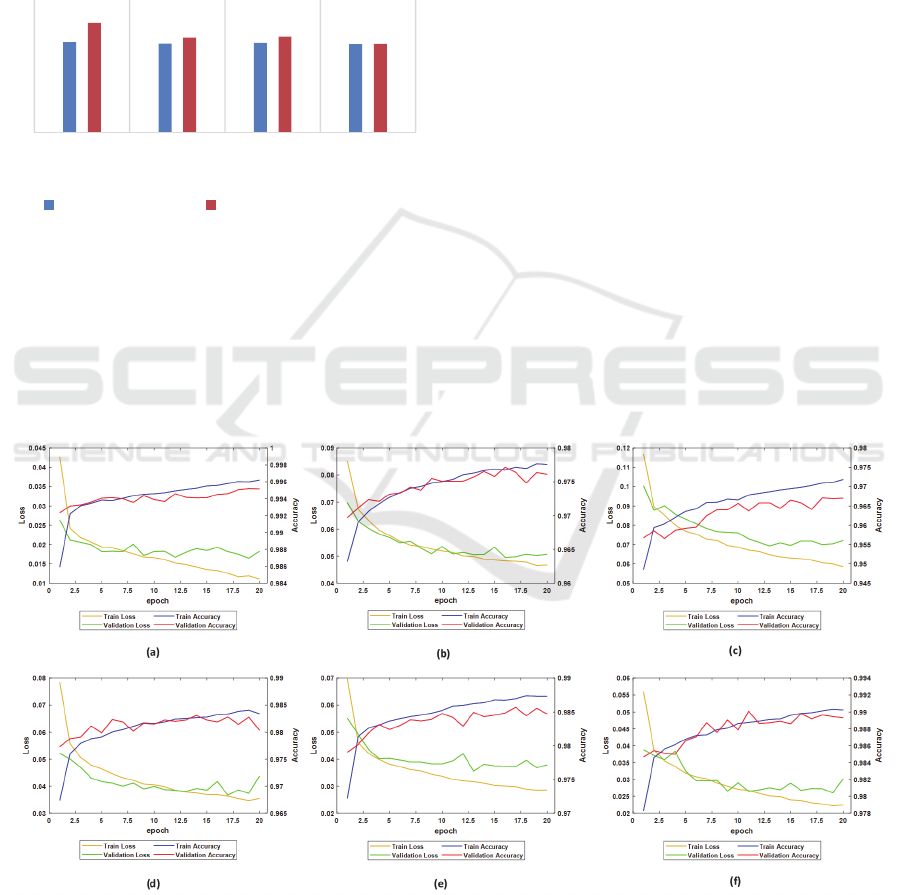
the corresponding epoch number. Figures 7, 8 depict
the training loss and validation graphs of the trained
Figure 7: Fine-tuned CNN models training graphs (a) 100% of Simulation dataset (b) 100% of Real dataset (c) 33% of Real
dataset + 0% of simulation data (d) 33% of Real dataset + 33% of simulation data (e) 33% of Real data + 66% of simulation
data (f) 33% of Real data + 100% of simulation data.
10256
10058
10163
10003
12415
10753
10863
10028
0123
NumberofSamples
DataLabel
RealEnvironment SimulationEnvironment
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
450

Figure 8: Training graphs of the CNN models trained from scratch (a) 100% of Simulation dataset (b) 100% of Real dataset
(c) 33% of Real dataset + 0% of simulation data (d) 33% of Real dataset + 33% of simulation data (e) 33% of Real data +
66% of simulation data (f) 33% of Real data + 100% of simulation data.
CNN models where a, b, c, d, e, and f refers to the six
dataset variations mentioned above.
Table 2: Training loss and accuracy of the chosen fine-
tuned CNN models.
Model Epoch
Training
Loss Accuracy
a 19 0.012 0.99
b 16 0.048 0.97
c 13 0.064 0.96
d 17 0.036 0.98
e 13 0.032 0.98
f 19 0.022 0.99
To avoid overfitting and improve the
generalization of the trained models the epoch with
minimum validation loss value is selected for
inference. Tables 2, 3 illustrate the chosen epoch
number and the corresponding training loss and
accuracy for all trained models.
Table 3: Training loss and accuracy of the chosen CNN
models trained from scratch.
Model Epoch
Training
Loss Accuracy
a 9 0.225 0.89
b 3 0.068 0.97
c 12 0.053 0.97
d 6 0.032 0.98
e 6 0.025 0.99
f 2 0.19 0.91
5 EVALUATION OF THE
TRAINED CNN MODELS
To investigate the learning ability of the models we
computed the confusion matrix, accuracy, precision,
recall, and F1 score for all trained models. The results
showed that there is a significant increase in the
accuracy per class as well as overall accuracy with the
continuous addition of simulation data. In other
words, the accuracy of the model trained with 33%
real-world data +100% simulation data is higher than
the model trained with only 33% of real data. Table 4
depicts the overall accuracy for models trained with
datasets c, d, e, and f.
Table 4: Overall accuracy for models trained with datasets
c,d,e, and f.
Model
Overall Accuracy
c d e f
Fine-tuned 0.816 0.9 0.93 0.95
From scratch 0.77 0.52 0.77 0.93
Table 5 depicts the F1 score for all trained
models. The F1 score measures the model accuracy
by calculating the weighted average of precision and
recall. An F1 score value of 1 is considered perfect,
i.e. model predictions have low false positives and
negatives.
Bridging the Reality Gap: Investigation of Deep Convolution Neural Networks Ability to Learn from a Combination of Real and Synthetic
Data
451
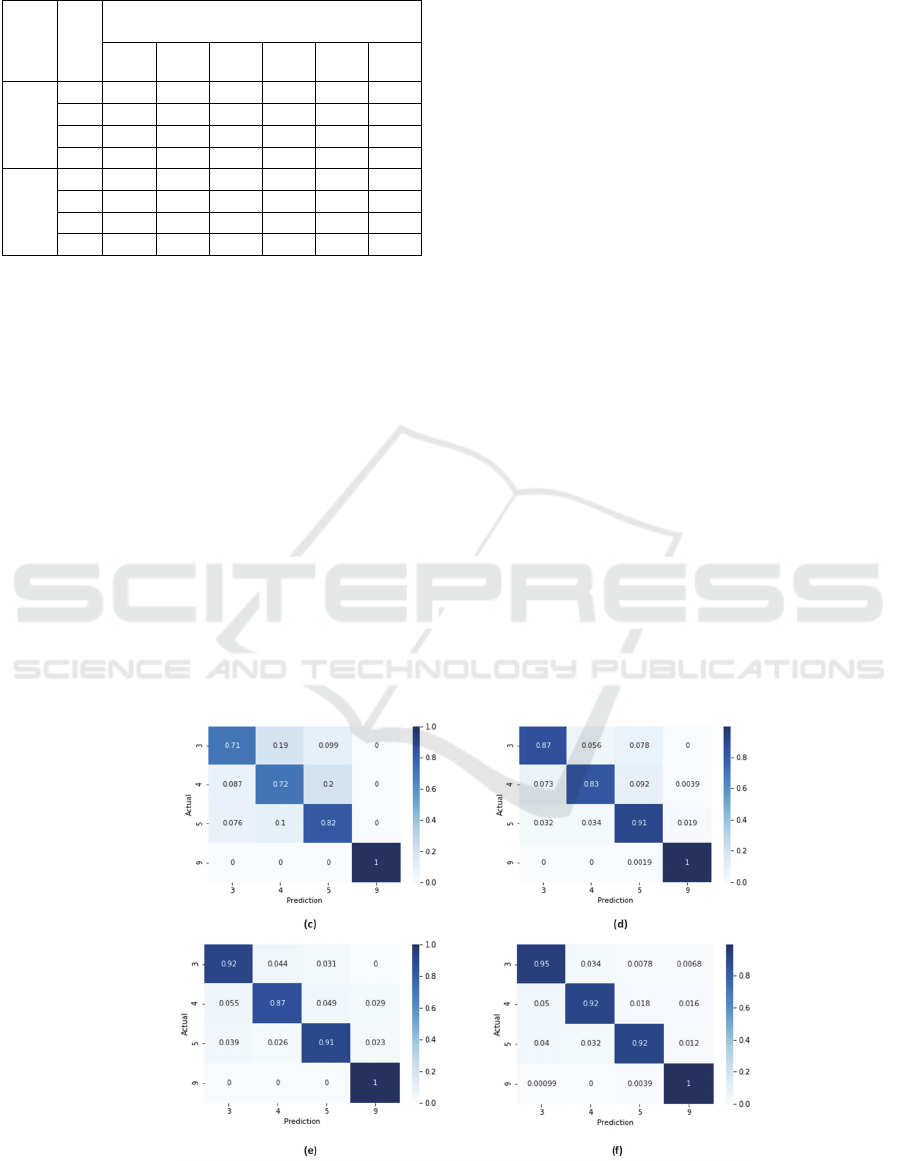
Table 5: F1 score of the trained models.
Model
Class
Dataset
a b c d e f
Fine-
tuned
1 0.98 0.84 0.76 0.87 0.91 0.93
2 0.96 0.80 0.71 0.87 0.89 0.92
3 0.97 0.85 0.78 0.87 0.91 0.94
4 0.96 0.99 1.0 0.98 0.97 0.98
From
scratch
1 0.99 0.79 0.71 0.5 0.71 0.91
2 0.97 0.78 0.71 0.5 0.71 0.89
3 0.97 0.80 0.72 0.3 0.72 0.92
4 0.96 0.94 0.91 0.56 0.9 1.0
Figure 9 illustrates an example of the confusion
matrix for the models fine-tuned with datasets c, d, e,
and f. The confusion matrix diagonal elements
represent the accuracy of correct predictions per
class. The analysis of the confusion matrix for all
trained models showed a major confusion between
one class and its neighbor classes. This confusion,
however, arises because of the small difference in
steering angle ‘‘10°’’ between one class and another
as well as the small field of view of the camera ‘‘78°’’
which decreases the size of the region of interest
drastically.
To analyze the models' performance further the
frozen inference graphs of the models trained with
datasets a, b, c, d, e, and f are obtained and deployed
on both environments, i.e. simulation and real
environments. In the inference stage, the models take
the incoming image frame and infer the required
action, i.e. vehicle velocity and steering angle.
Several test runs have been conducted in both
environments. The results of these experiments
demonstrated that the model trained only with real or
simulation data works only in its respective
environment. However, the models trained with
mixed data, i.e. real and simulation data generalize
perfectly to both environments especially when the
number of incorporated simulation data samples is
increased to 100%.
6 DISCUSSION
Datasets are a very crucial element in the training of
deep convolution neural networks as it requires a
massive amount of training data which in most cases
is difficult to find. Simulators can provide the domain
with an infinite amount of data samples, however,
they do not have a perfect representation of the
physical world which results in a huge gap between
both environments. Most of the research in the
robotics field employs either simulation or real data
but not a mixture of both. In this study, we
demonstrated that CNN models trained with a
mixture of real and artificial data generalize to both
real and simulation environments without model
adaption. This holds for fine-tuned models as well as
models trained from scratch. These findings are in
accordance with findings reported by Bayraktar,
Yigit, and Boyraz (2019). However, the authors did
not consider training models from scratch as well as
Figure 9: Fine-tuned CNN models confusion matrix (c) 33% of Real dataset + 0% of simulation data (d) 33% of Real dataset
+ 33% of simulation data (e) 33% of Real data + 66% of simulation data (f) 33% of Real data + 100% of simulation data
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
452

deploying the trained models to real and simulation
environments.
Our results cast a new light on the performance
and accuracy of the trained models. The models'
overall accuracy and performance increased
proportionally with the continuous addition of
simulation data.
7 CONCLUSIONS AND FUTURE
WORK
In this paper, we have investigated the ability of
CNNs models to generalize and learn from a mixture
of real and artificial data. Two CNN models have
been evaluated where the first was trained from
scratch and the other was fine-tuned to fit the dataset
classes of the lane tracking task. The CNN models are
trained six times wherein each a different
combination of the collected real and simulation
datasets is used. The results show that the models
trained with a dataset collected from a particular
environment can work only in this environment and
fails when it is transferred to an unseen target
environment. Another promising finding was that the
models' performance increased significantly and were
able to generalize to both real and simulation
environments with the inclusion of simulation data.
On this basis, we conclude that a mixture of
simulation and real data can help the CNN models to
generalize in cases where datasets are scarce and
when models trained in a particular domain are
transferred to an unseen target domain. This paper
provides a good starting point for further research. In
our future research, we intend to examine more
complex model architectures and environments.
REFERENCES
Bayraktar, E., Yigit, C., & Boyraz, P. (2019). A hybrid
image dataset toward bridging the gap between real and
simulation environments for robotics. (pp. 23–40).
Machine Vision and Applications.
Bousmalis, K., & Levine, S. (2017, October 30). Closing
the Simulation-to-Reality Gap for Deep Robotic
Learning. Retrieved March 3, 2020, from
https://ai.googleblog.com/2017/10/closing-simulation-
to-reality-gap-for.html.
Cutler, M., Walsh, T. J., & How, J. P. (2014).
Reinforcement learning with multi-fidelity simulators.
(pp. 3888-3895). IEEE.
Duan, L., Xu, D., & Tsang, I. (2012). Learning with
augmented features for heterogeneous domain
adaptation. (pp. 667–674). arXiv.
Gamal, O., Imran, M., Roth, H., & Wahrburg, J. (2020).
Assistive Parking Systems Knowledge Transfer to End-
to-End Deep Learning for Autonomous Parking. (pp.
216-221). IEEE.
Hoffman, J., Guadarrama, S., Tzeng, E. S., Hu, R.,
Donahue, J., Girshick, R., Darrell, T., Saenko, K.
(2014). LSDA: Large scale detection through
adaptation. (pp. 3536-3544). arXiv.
James, S., Davison, A. J., & Johns, E. (2017). Transferring
end-to-end visuomotor control from simulation to real
world for a multi-stage task. arXiv.
Kulis, B., Saenko, K., & Darrell, T. (2011). What you saw
is not what you get: Domain adaptation using
asymmetric kernel transforms. (pp. 1785-1792). IEEE.
Li, Y., Wang, N., Shi, J., Liu, J., & Hou, X. (2016).
Revisiting batch normalization for practical domain
adaptation. arXiv.
Lin, M., Chen, Q., & Yan, S. (2013). Network in network.
arXiv.
Loquercio, A., Kaufmann, E., Ranftl, R., Dosovitskiy, A.,
Koltun, V., & Scaramuzza, D. (2019). Deep drone
racing: From simulation to reality with domain
randomization. 36. IEEE Transactions on Robotics.
Peng, X., Sun, B., Ali, K., & Saenko, K. (2014). Exploring
invariances in deep convolutional neural networks
using synthetic images. arXiv.
Sadeghi, F., & Levine, S. (2016). Cad2rl: Real single-image
flight without a single real image. arXiv.
Stark, M., Goesele, M., & Schiele, B. (2010). Back to the
Future: Learning Shape Models from 3D CAD Data. 2,
p. 5. BMVC.
Su, H., Qi, C. R., Li, Y., & Guibas, L. J. (2015). Render for
cnn: Viewpoint estimation in images using cnns trained
with rendered 3d model views. (pp. 2686-2694). ICCV.
Sünderhauf, N., Brock, O., Scheirer, W., Hadsell, R., Fox,
D., Leitner, J., Upcroft, B., Abbeel, P., Burgard, W.,
Milford, M., Corke, P. (2018). The limits and potentials
of deep learning for robotics. 37, pp. 405-420. IJRR.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.,
Anguelov, D., Erhan, D., Vanhoucke, V., Rabinovich,
A. (2015). Going deeper with convolutions. (pp. 1-9).
IEEE.
Tkacz, M. (2005). Artificial neural networks in incomplete
data sets processing. In M. Kłopotek, S. Wierzchoń, &
T. K., Intelligent Information Processing and Web
Mining (Vol. 31, pp. 577-583). Berlin, Heidelberg,
Berlin: Springer.
Tobin, J., Fong, R., Ray, A., Schneider, J., Zaremba, W., &
Abbeel, P. (2017). Domain randomization for
transferring deep neural networks from simulation to
the real world. (pp. 23-30). IEEE.
Tzeng, E., Hoffman, J., Zhang, N., Saenko, K., & Darrell,
T. (2014). Deep Domain Confusion: Maximizing for
Domain Invariance. arXiv.
Yan, M., Frosio, I., Tyree, S., & Kautz, J. (2017). Sim-to-
real transfer of accurate grasping with eye-in-hand
observations and continuous control. arXiv.
Yosinski, J., Clune, J., Bengio, Y., & Lipson, H. (2014).
How transferable are features in deep neural networks?
NIPS ’14. NIPS Foundation.
Bridging the Reality Gap: Investigation of Deep Convolution Neural Networks Ability to Learn from a Combination of Real and Synthetic
Data
453

Yu, Z., & Yali, W. (2011). Analyses on Influence of
Training Data Set to Neural Network Supervised
Learning Performance. In L. S. Jin D., Advances in
Computer Science, Intelligent System and Environment.
Advances in Intelligent and Soft Computing (Vol. 106).
Heidelberg, Berlin: Springer.
Zhang, F., Leitner, J., Milford, M., & Corke, P. (2016).
Modular deep q networks for sim-to-real transfer of
visuo-motor policies. arXiv.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
454
