
A Bee Colony Optimization Algorithm for the Long-Term Car Pooling
Problem
Mouna Bouzid, Ines Alaya and Moncef Tagina
COSMOS-ENSI, National School of Computer Sciences, University of Manouba, Manouba 2010, Tunisia
Keywords:
Metaheuristic, Bee Colony Optimization, The Long-Term Car Pooling Problem.
Abstract:
Recently, the big number of vehicles on roadways and the increase in the rising use of private cars have made
serious and significant traffic congestion problems in large cities around the world. Severe traffic congestion
can have many detrimental effects, such as time loss, air pollution, increased fuel consumption and energy
waste. Public transportation systems have the capacity to decrease traffic congestion and be an answer to this
increasing transport demand. However, it cannot be the only solution. Another recommended solution for
reducing the harmful factors leading to such problems is car pooling. It is a collective transportation system
based on the idea that a person shares his private vehicle with one or more people that have the same travel
destination.
In this paper, a Bee Colony Optimization (BCO) metaheuristic is used to solve the Car Pooling Problem. The
BCO model is based on the collective intelligence shown in bee foraging behavior. The proposed algorithm is
experimentally tested on benchmark instances of different sizes. Computational results show the effectiveness
of our proposed algorithm when compared to several state of the art algorithms.
1 INTRODUCTION
Swarm intelligence is a field of nature inspired meta-
heuristics that was successfully applied to many op-
timization problems. We can cite the Ant colony op-
timization (Dorigo et al., 2006; Zouari et al., 2017),
the Particle swarm intelligence metaheuristic (Huang,
2015; Wu et al., 2011; Liu and Qin, 2014; Nouiri
et al., 2018; Karaboga, 2005), and the swarm intel-
ligence based on bees (Karaboga and Basturk, 2008;
Karaboga and Akay, 2011; Bacanin et al., 2010; Sub-
otic et al., 2010; Xue et al., 2018; Jadon et al., 2018).
The Bee Colony Optimization (BCO) is a meta-
heuristic in which the principal idea is taken from the
analogy between the natural behavior of bees search-
ing for food, and the behavior of optimization algo-
rithms searching for an optimum of combinatorial op-
timization problems. Based on exploration and ex-
ploitation ability, bees are able to intensify and to di-
versify the search at the same time.
In fact, the BCO metaheuristic is a competitive
approach for solving hard combinatorial optimiza-
tion problems, such as the stochastic Vehicle Routing
Problem (Lu
ˇ
ci
´
c and Teodorovi
´
c, 2003b; Teodorovi
´
c,
2008), Job Shop Scheduling Problem (Chong et al.,
2006; Chong et al., 2007; Wong et al., 2010b), p-
Median Problem (Teodorovic and
ˇ
Selmic, 2007) and
Traveling Salesman Problem (Wong et al., 2010a).
In this paper, our research is focused in another
problem named car pooling. This problem is a collec-
tive transportation system based on the idea that sets
of car owners having the same travel destination share
their vehicles. It has emerged to be a viable possibil-
ity for reducing private car usage around the world.
Car pooling has already been considered as an im-
portant alternative transportation service throughout
the world. In fact, many organizations such as large
companies or public administrations encourage their
citizens or employees to pick up or take back col-
leagues while driving to or from a common site. The
benefits which can be obtained are particularly rele-
vant both in terms of reduction of the use of private
cars and of the parking space required.
Thanks to massive use of internet, car pooling be-
comes more and more popular. Therefore, the num-
ber of applications proposing car pool increase day
after day, but they are not optimized, and use gener-
ally the FiFo ”First in First out” principle. In addition,
after bibliographical studies, it appears that the BCO
algorithm has never been used for solving the Long-
term Car Pooling Problem (LTCPP). The aim of this
work is to propose an intelligent approach based on
Bouzid, M., Alaya, I. and Tagina, M.
A Bee Colony Optimization Algorithm for the Long-Term Car Pooling Problem.
DOI: 10.5220/0009831803190327
In Proceedings of the 15th International Conference on Software Technologies (ICSOFT 2020), pages 319-327
ISBN: 978-989-758-443-5
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
319
the BCO algorithm to solve the Long-term Car Pool-
ing Problem (LTCPP), which can be deployed in such
application. In order to test the proposed algorithm
we used various benchmark instances.
The different parts of this paper are organized as
follows. In the next section, we define the Long-term
Car Pooling Problem. We recall in section 3 the basic
idea of BCO. In section 4, we describe the proposed
BCO algorithm for solving our problem. Experiments
and results are shown in section 5. Finally, conclu-
sions and perspectives are presented.
2 THE LONG-TERM CAR
POOLING PROBLEM
In this section, we give an overview of the Car Pool-
ing Problem and we present a mathematical formula-
tion for the LTCPP.
2.1 An Overview of Car Pooling
Problem
Car pooling (Bruglieri et al., 2011; Manzini et al.,
2012; Correia and Viegas, 2011; Yan et al., 2011;
Vargas et al., 2008) is a collective transportation sys-
tem. In this transport service, several people share
a common vehicle simultaneously, in order to reach
common destinations. The principal objective of this
mobility service is to decrease the number of private
vehicles.
By joining the car pooling system, many advan-
tages are offered. In fact, it saves time, parking
spaces, and decreases the number of accidents. Fur-
thermore, it encourages sociability between people
since it creates social interaction between colleagues,
friends and neighbors. By sharing journey expenses,
such as, tolls fuel, costs, and road stress, travel costs
can be reduced. Car pooling can make our environ-
ment more friendly, ecological and sustainable way
to travel as sharing journeys reduces carbon emissions
and traffic congestion on the roads.
Car pooling problem can be operated in two dif-
ferent ways. It can be either a Daily Car Pooling
Problem (DCPP) or a Long-term Car Pooling Prob-
lem (LTCPP).
In the case of DCPP (Baldacci et al., 2004; Calvo
et al., 2004; Swan et al., 2013), on each day a number
of users, considered as servers, are available for pick-
ing up and later bringing back colleagues (clients) on
that particular day. Then, the problem asks to assign
clients to servers and to identify which routes should
be driven by the servers in order to minimize the num-
ber of unassigned clients, subject to time window and
car capacity constraints.
However, in the case of LTCPP, each user is avail-
able to act both as a server and as a client. The LTCPP
requires to find user pools or crews where each user
will in turn, on different days, picks up the remaining
pool members and to identify the routes to be driven
by each member in the car pool. The main objective
of this problem is to minimize the number of vehicles
and the length of the path traveled by all users when
acting as servers subject to car capacity and time win-
dow constraints (Guo, 2012).
The Long-term Car Pooling Problem can be seen
as a compound problem. It is a combination of a clus-
tering problem and a routing problem. This model
is frequently used by universities and large compa-
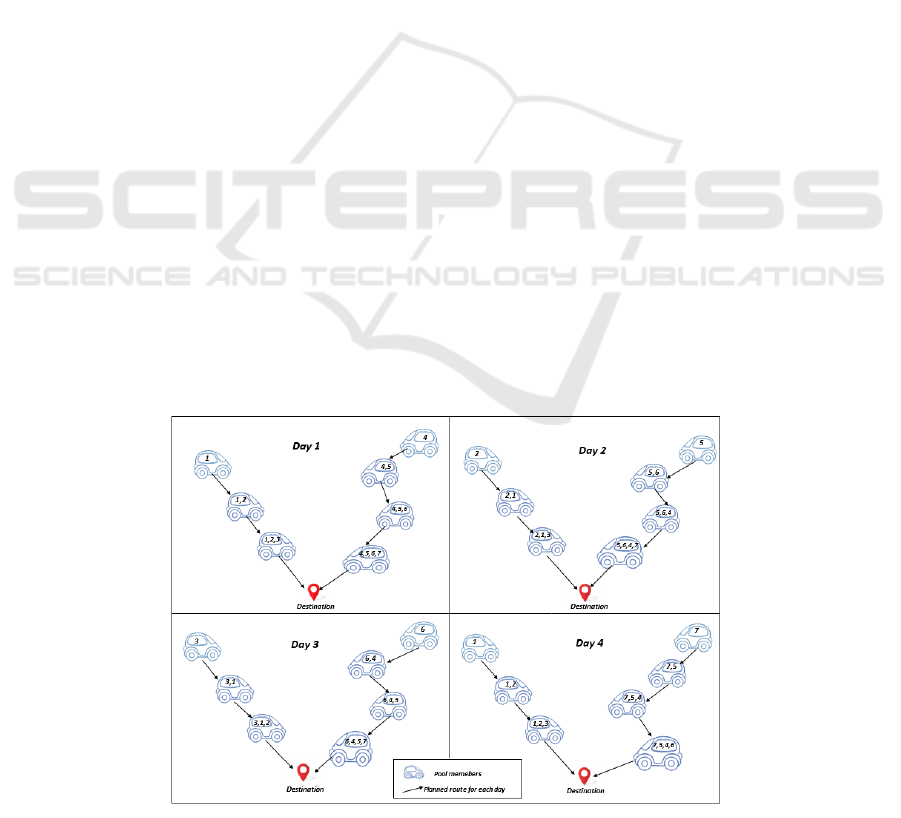
Figure 1: An example of the LTCPP.
ICSOFT 2020 - 15th International Conference on Software Technologies
320

nies which provide long-term carpool service for their
students or employees, since it is the most stable
car pooling model. Indeed, in the LTCPP users will
not usually be changing (in a relatively long period).
Therefore, the maximum number of users in a pool
is equal to the capacity of the smallest car among
those owned by all pool members, because finally
each member should pick up all the other ones. Figure
1 presents an example of the LTCPP. In this example
we suppose that we have 7 users and the maximum
car capacity is 4. In the first day, users 1, 2 and 3 are
pooled together where 1 is considered as server. Users
4, 5, 6 and 7 construct another pool and the user 5 is
considered as server. In the other days, each member
could be considered as server.
In this article, our study focuses on the Long-
term Car Pooling Problem, which is an NP-complete
problem (Varrentrapp et al., 2002). Due to its hard-
ness and significance it has constantly been stud-
ied by researchers who approached it from vari-
ous perspectives. After bibliographical study, we
noticed that different heuristics and metaheuristics
have been developed by different authors. We can
cite the Saving Functions Based Algorithm (Ferrari
et al., 2003), an Approximated Non-deterministic
Tree Search (ANTS) algorithm (Maniezzo et al.,
2004), a Simulation Based Approach (SB) (Correia
and Viegas, 2008), a Multi-Matching System (Yan
et al., 2011), a Clustering Ant Colony Algorithm
(CAC) (Guo et al., 2012), a Guided Genetic Algo-
rithm (GGA) (Guo et al., 2011).
2.2 LTCPP Formulation
The LTCPP can be modeled, by a direct graph G =
{U ∪ {0},A}, where U is the set of users, and A =
{arc(i, j)/i ∈ U, j ∈ U ∪ {0}} is the set of directed
weighted arcs where each arc(i, j) ∈ A is associated
with a non-negative travel cost d
i j
and a travel time
t
i j
. Every user i ∈ U for the Long-term Car Pooling
is characterized by: the origin (home), the node 0 that
corresponds to the destination, the earlier time e
i
for
leaving home; the acceptable time r
i
for arriving at
destination; the capacity Q
i
of his car; furthermore the
maximum time T
i
that the user will accept to drive.
The LTCPP can be seen as a multi-objective prob-
lem, looking for minimizing the total number of ve-
hicles traveling to the common destination and the
distance to be driven by each user, when acting as a
driver.
However, based on the research of Varrentrapp,
Maniezzo and St
¨
utzle (Varrentrapp et al., 2002), we
can combine these two objectives in a single objec-
tive function. Then, the LTCPP can be considered as
a single-objective problem.
Each user of pool k, will use on different days his
car to pick up his pool mates and drive to the common
destination. Therefore, each driver must know his
Hamiltonian path starting from his origin (his home),
then linking all other nodes corresponding to other
pool members’ homes exactly once, until reaching the
common destination.
Let path(i, k) be a feasible Hamiltonian path,
starting from i ∈ k, linking all j ∈ k\{i} and ending
in 0. Suppose |k| ≤ Q
k
, where |k| is the size of this
pool, Q
k
is the minimum car capacity of pool k and
all constraints are satisfied. d
i0
denote the travel cost
from user’s home directly to the destination, while ρ
i
is a penalty imposed for a client driving alone.
The cost of a pool k is then computed as follows:
Cost(k) =
(
∑
i∈k
cost(path(i,k))
|k|
,i f |k| > 1,
∑
i∈k
d
i0
+ ρ
i
,otherwise.
The total cost of a complete solution to the LTCPP
is then equal to the sum of the costs of the pools in
it. By this view, both objective functions can be op-
timized at the same time. In fact, provided that the
penalty of a client driving alone is sufficiently greater
than zero, it is better to pool clients together than to
leave them alone.
In order to formulate this problem, we present the
following notations (Guo et al., 2012):
• K : Set of indices of all pools;
• U : Set of indices of all users;
• A : Set of indices of all arcs;
• X
hk
i j
: Binary variable equals to 1 if arc(i,j) is trav-
eled by a server h of a pool k;
• Y
ik
: Binary variable equals to 1 if user i is in pool
k;
• S
h
i
: Positive variable indicating the pick-up time
of user i by server h;
• F
h
i
: Positive variable for denoting the arrival time
of user i at destination when traveling with server
h;
• d
i j
: Positive value indicating the travel cost be-
tween users i and j;
• t
i j
: Positive value indicating the travel time be-
tween users i and j;
• ρ
i
: Positive value for denoting the penalty for user
i when he travels alone;
• ϕ
i
: Binary variable equals to 1 if user i is not
pooled with any other user;
• e
i
: Positive value denoting the earlier time for
leaving home of user i;
A Bee Colony Optimization Algorithm for the Long-Term Car Pooling Problem
321

• r
i
: Positive value indicating the acceptable time
for arriving at work of user i;
• Q
k
: Positive value denoting the minimum car ca-
pacity of pool k;
• T
h
: Positive value for denoting the extra driving
time specified by server h;
Objective Function:
F= min(
∑
k∈K
∑
h∈U
∑
(i, j)∈A
d
i j
X
hk
i j
∑
i∈U
Y
ik
+
∑
i∈U
ρ
i
ϕ
i
)
Constraints:
∑
j∈U\{h}
X
hk
i j
= Y
ik
i,h ∈ U;k ∈ K; (1)
∑
j∈U
X
hk
ji
= Y
ik
i,h ∈ U; k ∈ K; (2)
∑
j∈U
X
hk
i j
=
∑
j∈U
X
hk
ji
i,h ∈ U;k ∈ K; (3)
∑
k∈K
Y
ik
+ϕ
i
= 1 i ∈U; (4)
∑
(i, j)∈A
X
hk
i j
≤ Q
k
h ∈ U; k ∈ K; (5)
∑
(i, j)∈A
X
hk
i j
t
i j
≤ T
h
h ∈ U ; k ∈ K; (6)
S
h
i
≥ e
i
i,h ∈ U; (7)
S
h
j
−S
h
i
≥ t
i j
−M ∗(1−
∑
k∈K
X
hk
i j
) (i, j) ∈ A; h ∈U; (8)
F
h
i
≥ S
h
i
+t
i0
−M ∗(1 −
∑
k∈K
X
hk
i0
) i,h ∈ U; (9)
F
h
i
≤ r
i
+M ∗(1−
∑
k∈K
∑
j∈U
X
hk
i j
) i,h ∈U; (10)
X
hk
i j
∈ {0,1} h ∈ U ; k ∈ K;(i, j) ∈ A; (11)
Y
ik
∈ {0,1} i ∈ U; k ∈ K; (12)
ϕ
i
∈ {0,1} i ∈ U; (13)
S
h
i
≥ 0 i,h ∈ U; (14)
F
h
i
≥ 0 i,h ∈ U; (15)
If there is an arc-connecting user i and user j or
user j and user i, equations (1) and (2) force a user i
to be added in a pool k. Constraint (3) makes sure the
continuity of the path. Equation (4) shows that each
user must be assigned to a pool or be penalized. The
car capacity and the extra driving time constraints are
translated respectively in (5) and (6). Equations (7)
and (8), where M is a big constant, collectively set
feasible pick-up times, while (9) and (10) are mini-
mum and maximum values of feasible arrival times,
respectively. Constraints (11) and (12) and (13) are
binary constraints while (14) and (15) are positivity
constraints.
3 THE BEE COLONY
OPTIMIZATION ALGORITHM
The BCO is a population-based algorithm inspired by
bees’ behavior in the nature. It was proposed for deal-
ing with hard combinatorial optimization problems.
The main idea of this approach is to build the multi
agent system (colony of artificial bees) where each ar-
tificial bee called agent, can generate one solution to
the problem. Looking for the best feasible solutions,
artificial bees investigate through the search space.
After that, they cooperate and exchange information.
Using collective knowledge and information sharing,
artificial bees update their current solution and then,
concentrate on the more promising areas and incre-
mentally abandon solutions from the less promising
ones. Step by step, this population of agents collec-
tively generate and/or yield their solutions. The BCO
algorithm runs iteratively until a stopping condition is
met.
The basic principles of collective bee intelligence
in solving combinatorial optimization problems were
proposed for the first time by Lucic and Teodorovic
(Lu
ˇ
ci
´
c and Teodorovi
´
c, 2003b; Lu
ˇ
ci
´
c and Teodorovi
´
c,
2003a).
The algorithm is composed of two alternating
phases: forward pass and backward pass. During ev-
ery forward pass, each artificial bee is exploring the
search space. It makes a predefined number of local
moves, which gradually construct and/or improve the
solution, yielding to a new solution. Having created
various partial solutions, they return to the nest and
perform the second phase, called backward pass. In
the hive, the artificial bees share information about
their solutions.
In nature, bees communicate through a waggle
dance which would notify the other bees about the
quantity and the quality of nectar they have discov-
ered, and the proximity of the path to the hive. In the
BCO algorithm, the artificial bees publicize the qual-
ity of the solution created, i.e. the objective function
value. During the backward pass, bees compare all
partial generated solutions. Based on a certain proba-
bility, each bee decides whether to stay faithful to its
created partial solution or not. Note that, bees with
higher objective function value have greater chance
to continue their own exploration. Hence, if bees
dance and thus recruit the nestmates before return-
ing to the created partial solution, they are considered
as recruiters. Moreover, if a bee chooses to become
uncommitted follower, it must select a new solution
from recruiters by the roulette wheel (better solutions
have higher opportunities of being chosen for explo-
ration).
ICSOFT 2020 - 15th International Conference on Software Technologies
322

The two phases (forward and backward pass) al-
ternate, until a stopping condition is met. There are
different possible stopping conditions, like, the maxi-
mum total number of forward/backward passes with-
out the improvement of the objective function, the
maximum total number of forward/backward passes,
etc.
In the first stage of the search, all the bees are lo-
cated in the hive.
4 THE PROPOSED BCO
ALGORITHM FOR SOLVING
THE LTCPP
The basic idea of the Bee Colony Optimization (BCO)
is to model the problem to solve as the search for
a minimum cost path in a graph, and to use artifi-
cial bees to search for good paths. Let’s represent
each user for the Long-term Car Pooling Problem by a
node. In our proposed algorithm, each bee is allowed
to explore and search for a car pool. The bee starts
to build a car pool by randomly determining the first
user to be added to its car pool initially empty. We
decompose our problem into stages. Each stage is as-
sociated to an unpooled user. In fact, the first user in
the car (driver) represents the first stage; the second
user to join the pool represents the second stage, etc.
In every stage, the bee chooses to visit one node.
Thus during the forward pass, every bee travels
to a node. It behaves according to a selection pro-
cess named the roulette wheel selection. Based on the
probability values, this model of choice is employed
to aid the bee in its decision making on which user
to be pooled. The probability gives to the bee the
likelihood to move from user i to user j. In fact, if
constraints presented previously (in section 2.1) are
satisfied, the probability value between two different
users i and j, P
i j
, is defined as follows:
P
i j
=
1
d
i j
∑
k∈U
1
d
ik
(16)
Where d
i j
represents the travel cost from user i to user
j. Note that the travel cost is inversely proportional to
P
i j
. In other words, the shorter the distance, the higher
the likelihood of that user to be chosen.
After that, the bee returns to the hive (in the back-
ward pass), where it participates in a decision making
process. Then, every bee decides whether to aban-
don their created partial solution and become again
uncommitted follower, or to continue its own explo-
ration and become recruiter.
During the second forward pass, each bee visits a
new node, creates a partial solution, and after that per-
forms again a backward pass and returns to the hive.
Then, it performs a third forward pass, etc.The
two phases of the search algorithm, forward and back-
ward pass, are alternated iteratively, until the total
number of forward/backward passes reaches the car
pool size. Then, all generated pools are evaluated and
the best one is added to the current solution.
One iteration is finished, when all the users are
clustered by bees. The algorithm terminates when a
maximal number of iterations is reached.
The overall structure of the BCO-LTCPP is out-
lined in Algorithm 1.
Algorithm 1: BCO-LTCPP Algorithm.
Initialize parameters: Number of bees n and Maxi-
mum Iteration;
While Maximum Iteration is not met do
Initialize the car pool of every bee b G
b
←
/
0;
Initialize the current solution S
cur
←
/
0;
Initialize the current set of users not yet pooled
U
cur
← U ;
Repeat
Select randomly a new user u;
NC
u
←the car capacity of user u;
For every bee b do{
Insert u into G
b
and eliminate it from U
cur
;}
j ← 1;
While ( j < NC
u
)do{
(a) The forward pass
For every bee b do{
Evaluate all unserved users in U
cur
;
Choose an unserved user i who satisfies
constraints using the roulette wheel
selection based on probability P
i j
(16);
Insert user i into G
b
and eliminate it
from U
cur
;}
(b)The backward pass
For every bee b do{
Every bee decides randomly whether to
continue its own exploration and
becomes recruiter, or to become
uncommitted;
If (b is uncommitted) then
Randomly chooses a recruiter to
follow;}
j ← j + 1;}
Find the best pool G − best
u
from all pools G
b
;
S
cur
← S
cur
S
G − best
u
;
Until all users are clustered;
Update the best solution;
End
Output the best solution;
A Bee Colony Optimization Algorithm for the Long-Term Car Pooling Problem
323

5 EXPERIMENTAL STUDY AND
DISCUSSION
This section describes, first, the benchmark problems
used in our experiments. To test the efficiency and
the performance of our algorithm, we have chosen
to compare our experimental results with four ap-
proaches for solving the LTCPP: the GGA, the Ants,
the CAC and the simulation based approach (SB),
since we haven’t found any other BCO in the liter-
ature for the LTCPP and because all these approaches
have been proven to have the ability to solve our prob-
lem and provide high solution quality. Since the CAC
is one of the most recent swarm intelligence meta-
heuristic for solving the Long-term Car Pooling Prob-
lem, and, in order to compare both of the algorithms
in the same environment, we have implemented the
CAC algorithm and tested it exactly as it was de-
scribed in (Guo et al., 2012), and we have maintained
the same parameter values. The results of GGA, Ants
and SB are obtained directly from (Guo, 2012).
5.1 Benchmark Problems
Since there are no benchmarks for the LTCPP in the
literature, we have chosen to use in our experimen-
tal study, the benchmarks developed in (Guo, 2012),
which are originally derived from the Pickup and
Delivery Problems with Time Windows (PDPTW)
benchmarks by Li and Lim (Li and Lim, 2003).
These benchmarks include two sets of instances
where each one is composed of 9 instances with the
number of users ranging from 100 to 400. The first set
has the users clustered distributed, therefore is named
with C. The users in the second set are allocated ran-
domly, so the set is named with R.
For all instances, we considered the depot in the
original instances as the destination, while we re-
tained the coordinates of the customers, who become
the users. The cost d
i j
was assumed to be equal to the
Euclidean distance between user i and j. Travel times
t
i j
were set equal to the distances divided by 50 km/h
(average travel speed). For each user, the penalty ρ
i
was calculated as ρ
i
= 2d
i0
, where we denoted by d
i0
the travel cost from user i’s home directly to the desti-
nation, and the car capacity Q
k
was set to 4. The max-
imum ride time T
k
was computed as T
k
= 1.5t
i0
, where
t
i0
represents the time needed to travel from the user
i’s home to the destination. The latest arrival times
r
i
is an integer value randomly selected in the interval
[510,540], and the earliest departure time of user i was
estimated to be equal to e
i
= r
i
− max(t
i0
+ 30,2t
i0
).
5.2 Computational Results
For both algorithms, there are some control parame-
ters, which are used for its efficient performance. Af-
ter some times of test runs, the parameters settings of
our algorithm are specified as follows:
-Number of iterations: IT = 1000,
-Number of bees: n = number of users in the instance.
The BCO-LTCPP algorithm was implemented in
JAVA, and all the tests were performed on computer
with Intel core i5-3317U, 1.70 GHz and 6 Go of
RAM.
5.2.1 Comparison of BCO-LTCPP with
State-of-the Art Algorithms
We have performed 10 runs for each instance. The
results presented in this study are the averages of
ten runs (AVG). We also report the best result (Best)
among the ten replications. In addition, the results are
also analyzed through the non-parametric Wilcoxon
rank-signed test (Sheskin, 2003) (W-test) in order to
verify if the difference between the compared algo-
rithms is statistically significant. Note that for W-
Test, the level of significance considered is 0.05. We
use (+) and (-) to denote if the BCO-LTCPP result
is, respectively, significantly or not significantly bet-
ter than the other algorithms.
Table 1 summarizes the results of the C set in-
stances. On this set of instances, the BCO-LTCPP
outperforms the GGA, Ants, SB and CAC on all in-
stances in best found solution. Considering the av-
erage solution quality, our algorithm outperforms the
GGA and Ants on 8 instances, and outperforms the
CAC and SB on all instances. Besides, the superior-
ity of our algorithm is statistically clear. In fact, the
W- test shows that statistically our algorithm outper-
forms widely the other algorithms (GGA, Ants and
SB). Also, statistically, the BCO-LTCPP is signifi-
cantly better than the CAC in seven instances among
the nine instances.
Table 2 shows the experimental results of set R in-
stances. In fact, we can draw that the BCO-LTCPP
outperforms the GGA, Ants, SB and CAC on all in-
stances in best-found solution. Also, the BCO-LTCPP
outperforms the GGA and Ants on 8 instances and the
CAC and SB on all instances, considering the average
solution. Furthermore, our algorithm is statistically
a clear winner when compared to the GGA, the Ants
and the SB. In addition, the W-test shows that the re-
sults of the BCO-LTCPP algorithm are significantly
better than the CAC algorithm on eight instances.
ICSOFT 2020 - 15th International Conference on Software Technologies
324

Table 1: Experimental results of set C instances for BCO, GGA, Ants, SB and CAC algorithms.
Instance Size BCO-LTCPP GGA Ants SB CAC
Best AVG Best AVG Best AVG Best AVG Best AVG W-test
C101 100 1491 1576.1 1585,5 1599,3 1585.5 1592,9 1647,4 1669,2 1523 1595.4 (+)
C102 100 1617 1696 1701,9 1712 1711.4 1748,5 1717,5 1724,8 1652 1722.9 (-)
C103 100 1503 1545 1513,7 1543,9 1512.6 1535,1 1532,2 1599,4 1524 1559.8 (+)
C201 200 2600 2653.5 2672,2 2749,4 2784.4 2854,2 2761,7 2868,6 2660 2754.3 (+)
C202 200 2765 2817.7 2836,7 2876,5 2936.1 3004,5 3081,7 3114,1 2816 2912.6 (+)
C203 200 2709 2785 2716 2891,8 2845.9 3003,5 2975,1 3182,4 2789 2874.9 (+)
C401 400 5308 5496.2 5489,4 5690,6 5833.5 6281,4 6174,2 6860,3 5661 5727 (+)
C402 400 4350 4586.2 4548,3 4786,4 4893.5 5153,2 5383,7 5524,5 4552 4590.9 (-)
C403 400 5776 5917.7 5909,6 6085,2 6125.6 6742,1 6675,2 6994,5 5803 5974.5 (+)
W-test (+) (+) (+) (-) (+) (+)
Table 2: Experimental results of set R instances for BCO, GGA, Ants, SB and CAC algorithms.
Instance Size BCO-LTCPP GGA Ants SB CAC
Best AVG Best AVG Best AVG Best AVG Best AVG W-test
R101 100 2136 2197,2 2207,1 2235,9 2207.1 2281,5 2235,1 2265,4 2199 2254.4 (+)
R102 100 1801 1898,2 1824,5 1867,5 1834.6 1864,2 1832,8 2091,7 1906 1976.2 (+)
R103 100 2098 2146,7 2209,1 2286 2299.2 2438,7 2204,7 2418,5 2102 2177.9 (+)
R201 200 3933 4054,4 4034,8 4188,3 4101.5 4253,5 4425 4567,1 4190 4272.2 (+)
R202 200 3598 3655,3 3646,8 3751,7 3772.2 4071,9 3952,4 4283,3 3698 3771.2 (+)
R203 200 3852 4017,8 3923,2 4158,4 4368.5 4541,5 4092,4 4257,5 4242 4372.9 (+)
R401 400 7441 7659,7 7514,9 7799,5 8396.1 8580,4 8787,8 8993,8 7777 7894.6 (+)
R402 400 6023 6233,6 6172,7 6254 6512.7 6893,3 7258,7 7417,5 6045 6186.5 (-)
R403 400 7403 7617,5 7670,2 7872,9 8113.1 8338,9 8841,9 8933,5 7885 7978.8 (+)
W-test (+) (+) (+) (+) (+) (+)
Table 3: CPU time of the different algorithms (in seconds).
Instances BCO GGA Ants SB CAC
C101 2 13 17 91 8
C102 3 9 14 94 7
C103 2 12 18 85 8
C201 14 31 57 329 39
C202 14 28 64 473 43
C203 14 42 58 394 39
C401 46 248 424 934 231
C402 42 203 357 683 243
C403 46 295 511 1257 263
R101 2 18 18 100 6
R102 2 15 17 97 7
R103 3 17 21 80 7
R201 15 43 108 430 35
R202 16 41 84 231 33
R203 12 38 116 540 34
R401 59 392 581 1106 217
R402 49 277 479 896 231
R403 55 311 631 1037 237
Computer \ Langage Intel core i5-3317U
1.70GHz (JAVA)
Intel core i7 740QM
2.9GHz (JAVA)
Intel core i7 740QM
2.9GHz (JAVA)
Intel core
i7 740QM
2.9GHz
(JAVA)
Intel core i5-3317U
1.70GHz (JAVA)
A Bee Colony Optimization Algorithm for the Long-Term Car Pooling Problem
325

5.2.2 Comparison of CPU Time of the Different
Algorithms
Table 3 presents the elapsed CPU time to obtain the
best solution. In this table, we can see that, the com-
puting time of the BCO-LTCPP is much lower than
other approaches. We note that these values are given
as an indication since the different algorithms are
tested on different computers. However, we remark
that the proposed BCO-LTCPP algorithm, despite it
was run on the less powerful processor, takes much
less CPU time.
Therefore, we can conclude that our algorithm is
able to reach significant better solutions in a short
time.
6 CONCLUSIONS
In this paper, we proposed a Bee Colony Optimiza-
tion algorithm for the Long-term Car Pooling Prob-
lem. The proposed BCO algorithm, called BCO-
LTCPP, was tested on various benchmark instances.
Based on the experimental results, we can conclude
that the BCO-LTCPP is an efficient approach to solve
the Long-term Car Pooling Problem. In fact, these re-
sults show that the proposed algorithm is able to reach
significantly better solutions in a very short computa-
tional time when compared to other competitive ap-
proaches from literature on all instances.
The effectiveness of the developed BCO algo-
rithm encourages its application, for future works,
to other transportation problems, such as the daily
carpooling problem or the academic vehicle routing
Problem.
REFERENCES
Bacanin, N., Tuba, M., and Brajevic, I. (2010). An object-
oriented software implementation of a modified arti-
ficial bee colony (abc) algorithm. In Proceedings of
the 11th WSEAS international conference on nural
networks and 11th WSEAS international conference
on evolutionary computing and 11th WSEAS interna-
tional conference on Fuzzy systems, pages 179–184.
World Scientific and Engineering Academy and Soci-
ety (WSEAS).
Baldacci, R., Maniezzo, V., and Mingozzi, A. (2004). An
exact method for the car pooling problem based on
lagrangean column generation. Operations Research,
52(3):422–439.
Bruglieri, M., Ciccarelli, D., Colorni, A., and Lu
`
e, A.
(2011). Poliunipool: a carpooling system for uni-
versities. Procedia-Social and Behavioral Sciences,
20:558–567.
Calvo, R. W., de Luigi, F., Haastrup, P., and Maniezzo, V.
(2004). A distributed geographic information system
for the daily car pooling problem. Computers & Op-
erations Research, 31(13):2263–2278.
Chong, C. S., Low, M. Y. H., Sivakumar, A. I., and Gay,
K. L. (2006). A bee colony optimization algorithm to
job shop scheduling. In Proceedings of the 2006 win-
ter simulation conference, pages 1954–1961. IEEE.
Chong, C. S., Low, M. Y. H., Sivakumar, A. I., and Gay,
K. L. (2007). Using a bee colony algorithm for neigh-
borhood search in job shop scheduling problems. In
21st European conference on modeling and simula-
tion (ECMS 2007).
Correia, G. and Viegas, J. M. (2011). Carpooling and car-
pool clubs: Clarifying concepts and assessing value
enhancement possibilities through a stated preference
web survey in lisbon, portugal. Transportation Re-
search Part A: Policy and Practice, 45(2):81–90.
Correia, G. H. d. A. and Viegas, J. M. (2008). Structured
simulation-based methodology for carpooling viabil-
ity assessment. Technical report.
Dorigo, M., Birattari, M., and Stutzle, T. (2006). Ant colony
optimization. IEEE computational intelligence maga-
zine, 1(4):28–39.
Ferrari, E., Manzini, R., Pareschi, A., Persona, A., and Re-
gattieri, A. (2003). The car pooling problem: Heuris-
tic algorithms based on savings functions. Journal of
Advanced Transportation, 37(3):243–272.
Guo, Y. (2012). Metaheuristics for solving large size long-
term car pooling problem and an extension. PhD the-
sis, Artois.
Guo, Y., Goncalves, G., and Hsu, T. (2011). A guided
genetic algorithm for solving the long-term car pool-
ing problem. In 2011 IEEE Workshop On Computa-
tional Intelligence In Production And Logistics Sys-
tems (CIPLS), pages 1–7. IEEE.
Guo, Y., Goncalves, G., and Hsu, T. (2012). A clustering ant
colony algorithm for the long-term car pooling prob-
lem. International Journal of Swarm Intelligence Re-
search (IJSIR), 3(2):39–62.
Huang, C.-L. (2015). A particle-based simplified swarm
optimization algorithm for reliability redundancy al-
location problems. Reliability Engineering & System
Safety, 142:221–230.
Jadon, S. S., Bansal, J. C., Tiwari, R., and Sharma,
H. (2018). Artificial bee colony algorithm with
global and local neighborhoods. International Journal
of System Assurance Engineering and Management,
9(3):589–601.
Karaboga, D. (2005). An idea based on honey bee swarm
for numerical optimization. Technical report, Tech-
nical report-tr06, Erciyes university, engineering fac-
ulty, computer . . . .
Karaboga, D. and Akay, B. (2011). A modified artificial
bee colony (abc) algorithm for constrained optimiza-
tion problems. Applied soft computing, 11(3):3021–
3031.
Karaboga, D. and Basturk, B. (2008). On the performance
of artificial bee colony (abc) algorithm. Applied soft
computing, 8(1):687–697.
ICSOFT 2020 - 15th International Conference on Software Technologies
326

Li, H. and Lim, A. (2003). A metaheuristic for the
pickup and delivery problem with time windows. In-
ternational Journal on Artificial Intelligence Tools,
12(02):173–186.
Liu, Y. and Qin, G. (2014). A modified particle swarm op-
timization algorithm for reliability redundancy opti-
mization problem. Journal of Computers, 9(9):2124–
2131.
Lu
ˇ
ci
´
c, P. and Teodorovi
´
c, D. (2003a). Computing with
bees: attacking complex transportation engineering
problems. International Journal on Artificial Intelli-
gence Tools, 12(03):375–394.
Lu
ˇ
ci
´
c, P. and Teodorovi
´
c, D. (2003b). Vehicle routing prob-
lem with uncertain demand at nodes: the bee system
and fuzzy logic approach. In Fuzzy sets based heuris-
tics for optimization, pages 67–82. Springer.
Maniezzo, V., Carbonaro, A., and Hildmann, H. (2004). An
ants heuristic for the long—term car pooling problem.
In New optimization techniques in engineering, pages
411–430. Springer.
Manzini, R., Pareschi, A., et al. (2012). A decision-support
system for the car pooling problem. Journal of Trans-
portation Technologies, 2(02):85.
Nouiri, M., Bekrar, A., Jemai, A., Niar, S., and Ammari,
A. C. (2018). An effective and distributed particle
swarm optimization algorithm for flexible job-shop
scheduling problem. Journal of Intelligent Manufac-
turing, 29(3):603–615.
Sheskin, D. J. (2003). Handbook of parametric and non-
parametric statistical procedures. crc Press.
Subotic, M., Tuba, M., and Stanarevic, N. (2010). Paral-
lelization of the artificial bee colony (abc) algorithm.
Recent advances in neural networks, fuzzy systems &
evolutionary computing, pages 191–196.
Swan, J., Drake, J.,
¨
Ozcan, E., Goulding, J., and Woodward,
J. (2013). A comparison of acceptance criteria for the
daily car-pooling problem. In Computer and informa-
tion sciences III, pages 477–483. Springer.
Teodorovi
´
c, D. (2008). Swarm intelligence systems for
transportation engineering: Principles and applica-
tions. Transportation Research Part C: Emerging
Technologies, 16(6):651–667.
Teodorovic, D. and
ˇ
Selmic, M. (2007). The bco algorithm
for the p-median problem. Proceedings of the XXXIV
Serbian Operations Research Conferece, pages 417–
420.
Vargas, M. A., Sefair, J., Walteros, J. L., Medaglia, A. L.,
and Rivera, L. (2008). Car pooling optimization:
a case study in strasbourg (france). In 2008 IEEE
Systems and Information Engineering Design Sympo-
sium, pages 89–94. IEEE.
Varrentrapp, K., Maniezzo, V., and St
¨
utzle, T. (2002).
The long term car pooling problem–on the sound-
ness of the problem formulation and proof of np-
completeness. Technische Universitat Darmstadt.
Wong, L.-P., Low, M. Y. H., and Chong, C. S. (2010a).
Bee colony optimization with local search for travel-
ing salesman problem. International Journal on Arti-
ficial Intelligence Tools, 19(03):305–334.
Wong, L.-P., Puan, C. Y., Low, M. Y. H., Wong, Y. W., and
Chong, C. S. (2010b). Bee colony optimisation al-
gorithm with big valley landscape exploitation for job
shop scheduling problems. International Journal of
Bio-Inspired Computation, 2(2):85–99.
Wu, P., Gao, L., Zou, D., and Li, S. (2011). An improved
particle swarm optimization algorithm for reliability
problems. ISA transactions, 50(1):71–81.
Xue, Y., Jiang, J., Zhao, B., and Ma, T. (2018). A
self-adaptive artificial bee colony algorithm based on
global best for global optimization. Soft Computing,
22(9):2935–2952.
Yan, S., Chen, C.-Y., and Lin, Y.-F. (2011). A model with
a heuristic algorithm for solving the long-term many-
to-many car pooling problem. IEEE Transactions on
Intelligent Transportation Systems, 12(4):1362–1373.
Zouari, W., Alaya, I., and Tagina, M. (2017). A hybrid ant
colony algorithm with a local search for the strongly
correlated knapsack problem. In 2017 IEEE/ACS 14th
International Conference on Computer Systems and
Applications (AICCSA), pages 527–533. IEEE.
A Bee Colony Optimization Algorithm for the Long-Term Car Pooling Problem
327
