
iTLM: A Privacy Friendly Crowdsourcing Architecture for Intelligent
Traffic Light Management
Christian Roth
a
, Mirja Nitschke
b
, Matthias H
¨
ormann and Do
˘
gan Kesdo
˘
gan
University of Regensburg, Regensburg, Germany
{firstname.lastname}@ur.de
Keywords:
Traffic Light, V2X, Privacy, Attribute-Based-Credentials, Privacy-ABC System, Reinforcement Learning,
Privacy-by-design.
Abstract:
Vehicle-to-everything (V2X) interconnects participants in vehicular environments to exchange information.
This enables a broad range of new opportunities. We propose a self learning traffic light system which uses
crowdsoured information from vehicles in a privacy friendly manner to optimize the overall traffic flow. Our
simulation, based on real world data, shows that the information gain vastly decreases waiting time at traffic
lights eventually reducing CO2 emissions. A privacy analysis shows that our approach provides a significant
level of k-anonymity even in low traffic scenarios.
1 INTRODUCTION
Confronted by the climate change nowadays, there is
an urgent need to reduce CO2 emissions produced by
vehicles. Particularly in cities, the pollution is severe
because of frequent stop-and-go traffic. One reason
may lie in rather inflexible cyber-physical systems,
i.e. traffic lights, unable to quickly adapt to chang-
ing situations. Therefore, the field of traffic control
requires new economic approaches to optimize the ef-
ficiency of existing infrastructure, ultimately protect-
ing the environment by reducing pollutants. In this
paper, we investigate an intelligent traffic light man-
agement (TLM) using crowdsourced user input in a
privacy-friendly manner to achieve this goal.
With an increasing number of vehicles having the
ability to communicate with other cars (V2V) or in-
frastructure (V2I) without additional costs, vehicle-
to-everything (V2X) communication is finally reach-
ing the mass market (Abuelsamid, 2019). V2X
can be considered to be an enabler for real-time
TLM because it is now possible to cheaply dis-
tribute the needed information using V2X. This facil-
itates the mostly academic field of self-learning, self-
optimizing traffic light scheduling to become applied
in real environments. To present an applicable ap-
proach, we assume a mixed environment with some
vehicles not being enabled for V2X. With our ap-
proach, it is conceivable that such participants could
a
https://orcid.org/0000-0002-1668-5441
b
https://orcid.org/0000-0002-2527-6340
also (although not necessarily) be integrated using a
smartphone-based solution.
However, many security implications have to be
considered in the open, loosely-connected V2X en-
vironment. In particular, integrity must be consid-
ered because a safe system must be ensured at any
moment. Furthermore, such a system has to be built
on privacy by design principles since its users have
to be protected for broad-end user acceptance. One
can use e.g. ABC4Trust (Sabouri et al., 2015), a
privacy-enhanced attribute-based credential (privacy-
ABC) system. We propose a reinforcement learn-
ing (RL) powered cyber-physical system to reduce
the overall waiting time. Our approach takes into ac-
count the wide variety of requirements: optimize the
traffic light schedules using (unreliable) information
from users while protecting their privacy.
To the best of our knowledge, we are the first to
combine traffic light management based on user in-
put in vehicular environments with user privacy. We
contribute with 1) a communication protocol for V2X
traffic light management based on the ABC4Trust
platform, 2) a self-learning traffic light management
algorithm called iTLM using user input, 3) a simu-
lation using SUMO to evaluate the performance of
our approach in comparison to standard, widely ap-
plied models, and 4) a study of the contradicting re-
quirements of privacy and integrity. The simulation is
based on real data of the City of Hamburg in Germany
to allow meaningful conclusions.
Section 2 briefly introduces ABC4Trust and dif-
ferent approaches for traffic light systems w.r.t. pri-
vacy. Section 3 illustrates our protocol including an
attacker model. Section 4 thoroughly evaluates the
approach in terms of performance and discusses the
impacts of the privacy enhancing techniques (PETs).
Section 5 pointedly concludes the paper.
2 RELATED WORK
Traffic light control systems (TLCS) can be organized
in static or dynamic approaches (Li, 2012). Table 1
presents an overview of methods for traffic light con-
trol. It specifies for every method not only the pros
and cons, but also reviews the privacy friendliness of
the approaches and discusses if the method can re-
spond to dynamic traffic flows.
We shortly focus on recent developments of re-
inforcement learning (RL) approaches which try to
model the actual traffic conditions to provide highly
dynamic traffic light schedules. It does so by predict-
ing the number of cars for each (waiting) lane with ba-
sic approaches, e.g. by relying on actuated or camera
inputs (Arel et al., 2010). Other superior approaches
are more privacy-invasive as they use the car’s cur-
rent position and speed to predict arrival times (Liang
et al., 2019; Gao et al., 2017). Interconnecting mul-
tiple traffic lights optimizes the traffic light sched-
ules (Steingr
¨
over et al., 2005) by overcoming the lim-
ited area of view of camera-based systems. How-
ever, as already mentioned, many of these systems use
data provided by cameras or environmental sensors to
track individual cars and to derive decisions.
A holistic approach must ensure that the privacy of
each individual is protected while taking into account
the open and untrusted environment of V2X scenarios
(i.e. smart traffic light scheduling) due to its contra-
dicting requirements (Blumberg et al., 2005). Typical
pseudonym-based approaches are not feasible in V2X
networks (Wiedersheim et al., 2010). Pseudonyms
may also be critical when they are shared across mul-
tiple messages. Such messages can be linked together
to form a location trajectory of such a car. (Schaub
et al., 2009) describes concrete requirements for ve-
hicular communication systems which are currently
not achieved in any RL-based traffic light approach.
We cherry-picked the advantages of RL-based ap-
proaches and V2X benefits and overcome the draw-
backs. That given, we propose a system combining
the dynamics of RL and V2X with privacy proper-
ties of conventional methods. Furthermore, for the
first time, everything is poured into a new privacy-
friendly protocol based on the robust ABC4Trust plat-
form (Sabouri et al., 2015).
ABC4Trust. (Sabouri et al., 2015) is a EU funded
privacy enhanced attribute-based credential (privacy-
ABC) system. It allows to build trustworthy applica-
tions which combine contradicting goals such as re-
liability, integrity and privacy. A common architec-
ture abstracts the specific implementation of the ABC
system, enabling one to build complex yet secure ap-
plications. ABC4Trust defines five different roles, i.e.
User, Verifier, Issuer, Inspector and Revocator. Fur-
thermore, it defines credentials as containers for
attributes which are defined either by a user or
issuer, (blindly) confirmed by an issuer and owned
by a user. Knowing and owning a signed credential
can then be used to gain access to a remote system
protected by a Verifier. In addition, a pseudonym
is a (temporary) identity of a user and allows (lim-
ited) linkability if needed and prevents replay attacks
which is explicitly relevant in our use case since Sybil
attacks are an omnipresent risk in V2X environments.
Both elements can be bound to a secret only known
to a user, adding an additional layer of authenticity. It
is a viable foundation for securing communication in
our privacy-friendly system architecture.
3 INTELLIGENT TRAFFIC
LIGHT MANAGEMENT (iTLM)
We now introduce our system model and present our
protocol. Attacks and abuse possibilities including
protection mechanisms are discussed as well.
According to our scenario, vehicles try to find the
fastest route to a destination using static (road net-
work) and dynamic (traffic congestion) information.
However, travel duration is often impacted by the
waiting time t
w
at traffic lights. To allow a traffic
light (T L) to intelligently optimize the light schedule,
it needs additional information, e.g. the vehicle’s time
of arrival. This information may be sent by vehicles to
a traffic light long before arrival. By aggregating the
information from vehicles, the traffic light can find the
optimal light schedule, which globally minimizes the
overall waiting time (
∑
t
w
) at a junction.
The proposed architecture takes the special condi-
tions in V2X environments into account. The pro-
tocol is based on an attribute-based credential sys-
tem to provide privacy. At the same time, the
system was designed to handle the open nature
of V2X environments with untrustworthy partici-
pants. Thus, integrity protecting mechanisms are
needed. Both contradicting goals can be achieved us-
ing ABC4Trust (Sabouri et al., 2015).
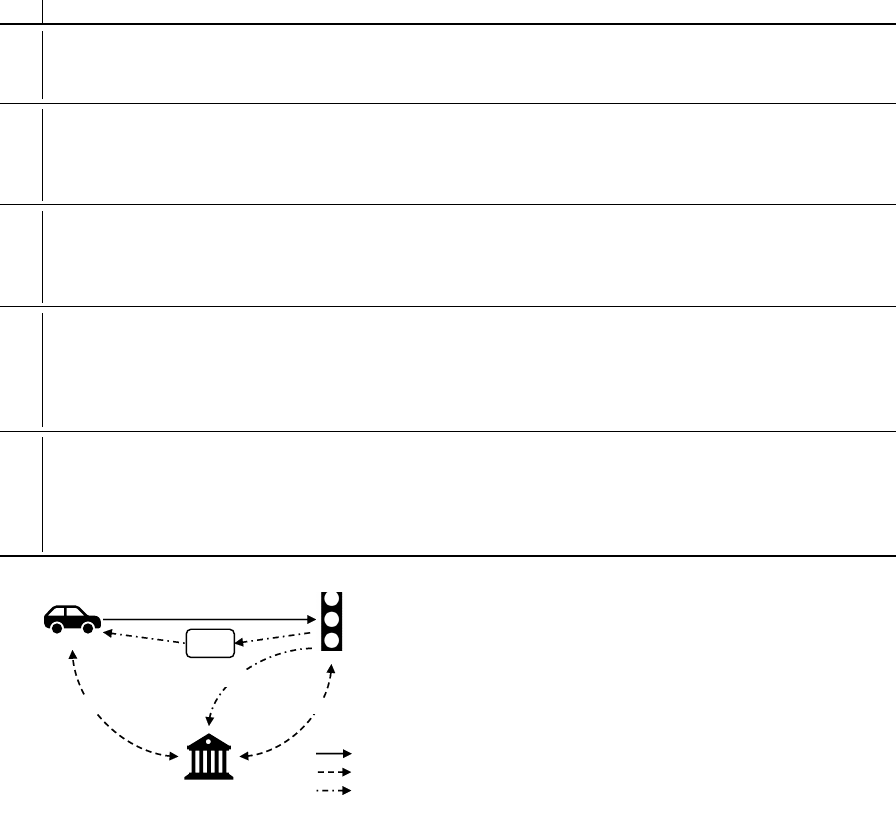
Table 1: Comparison of different approaches for traffic light scheduling
Method Pros & Cons Properties
Static
Different predefined light cycle schedules
(optionally time dependent)
+ Common
+ Easy to deploy
- Not dynamic at all
high privacy: no
sensors at all;
not dynamic
Actuated
1-2 inductive loops per lane detect presence
of vehicles to control the length of green
phases (e.g. (Darroch et al., 1964))
+ Can adjust to traffic density
- High traffic density cannot be
handled very well
- Short-term information
high privacy: no
personal data;
limited dynamic
Camera
Cameras per lane detect (number of) vehi-
cles to control the length of green phases
(e.g. (Rachmadi et al., 2011; Nirmani et al.,
2018; Xing et al., 2018))
+ Can adjust to traffic density
+ Fair system gives every lane
green time
- Short-term information
medium privacy:
license plate
allows tracking;
limited dynamic
V2X
Virtual traffic lights communicate directly
with cars and receive information of arrival
time to model actual traffic flow (e.g. (Gao
et al., 2019; Varga et al., 2017))
+ Very dynamic
+ No physical traffic lights needed
+ Can find optimal solution
- Requires all participants to be
enabled for V2X communication
poor privacy:
assignable com-
munication
allows tracking;
full dynamic
RL
Fusion of multiple input sources give feed-
back for decisions, optionally connected to
other TLCSs, tries to predict traffic flow
(e.g. (Arel et al., 2010; Liang et al., 2019;
Steingr
¨
over et al., 2005))
+ Dynamic
+ Constantly optimizing
- Seems to be an academic solu-
tion
- Needs to know trajectory of cars
poor privacy:
moving pattern
allows tracking;
full dynamic
Setup (OoB)
Reveal (OoB)
Realtime
One-Time
On Demand
TL
LEA
V
V2X
Setup (OoB)
id(TL)
Figure 1: Minimal communication overhead of participants.
3.1 System Model
Junction. The given environment throughout this pa-
per is a junction where a traffic light controls all wait-
ing lanes W L . A typical junction in our scenario has
12 waiting (3 per incoming direction) and 4 outgoing
lanes. Each waiting lane wl ∈ W L has a dedicated
outgoing orientation of north (n), west (w), south (s)
or east (e). Hence, a waiting lane is a combination of
two orientations.
Participants. Communication in the system is kept
minimal to take into account the limited communi-
cation range and unstable connections in V2X envi-
ronments. We distinguish between V2X communica-
tion using one of the existing standards (e.g. WAVE)
and Out-of-Band (OoB) communication happening in
special conditions (c.f. Figure 1).
The User is a Vehicle (V ) equipped with an On-Board-
Unit (OBU), including a unique ID and cryptographic
material enabling it to exchange data in the V2X net-
work. OoB communication is also possible. A vehicle
is considered to always know both its current position
and its route to a destination. The V uses a scope-
exclusive pseudonym P for a specific scope. The
scope can be publicly known. We use a scope artifact
ScopeString = H (id(T L)||TimeWindow) and derive a
scope-exclusive pseudonym P with a constant, pub-
licly distributed value id(TL) for the traffic light, thus
the V uses another pseudonym for every T L to allow
limited linkability (Pfitzmann and Borcea-Pfitzmann,
2010). Additionally, the granularity of the dynamic
part TimeWindow controls how long a T L can track a
V via its unique P, e.g. it can be one day.
The Traffic Light System (TL) is a cyber-physical sys-
tem attached to a communication network, able to
communicate via V2X, but also via OoB communica-
tion. It controls a real-world traffic light so that traffic
can be controlled not only by autonomously driving
cars levels 3 and 4 (cooperative driving), but also by
non-connected vehicles. T L is also a Verifier since it
checks incoming messages from V s for validity.
To provide a robust system in terms of integrity and
revocability, a Law Enforcement Agency (LEA) is in-
troduced. It knows the real identities of all vehicles in
the system. LEA itself is not included in traffic con-
trol operations but manages the users, which are able
to participate (therefore called Issuer). Thus, she does
not need to know the location of any car at any time.
She is a semi-trusted entity since all participants in
the system trust digital signatures issued by her. In
situations of fraud, she can reveal the identity of a V
once it is requested by a TL and then exclude vehicles
(making LEA also an Inspector and Revocator).
3.2 Traffic Cycle Protocol
Setup. The setup phase is performed once. It is desir-
able to include as many operations as possible in this
static one-time phase to take into account the highly
dynamic, low-latency, and loosely-connected nature
of V2X environments. During the setup phase, the
V and T L exchange with the LEA all (cryptography)
information and policies needed for participation.
Announcement of Arrival. (TranVT) To allow a T L
to calculate feasible traffic light schedules, it requires
information from V s. However, in order to use this
information, a V has to prove that it is a valid mem-
ber of the network by 1) having a valid OBU and 2) is
still allowed to participate. To guarantee that, one can
use the key-binding credentials from the ABC4Trust
platform. Credentials are guaranteed to be unforge-
able. If a V wants to provide information to a T L,
it has to select a specific amount of verified creden-
tials according to the (static) presentation policy and
wrap it along with the actual arr = (wl,t
a
) payload,
in a so-called presentation token. Then the package
is encrypted with the addressed T L’s public key. This
allows tamper-proof package forwarding in the V2X
environment. To overcome “credential pooling”, cre-
dentials are bound to a specific OBU of a V using
an implicit proof-of-knowledge (called key-binding).
Once a presentation token provides the needed cre-
dentials and confirms to the agreed presentation pol-
icy, the TL buffers arr for further calculation.
Calculation of Traffic Light Schedule. (TLLC) We
consider that the traffic lights of our junction use a
simple four-phase-model. That means that every light
cycle consists of 4 traffic flows. In one phase, the ve-
hicles in the vertical direction driving straight ahead
and turning right (srv) have green, then those in the
other direction (srh). The same applies to left-turning
vehicles (lv, lh). We use Algorithm 1 to calculate the
duration of the corresponding green ∆T
g
and yellow
∆t
y
wl
periods in the next light cycle. The T L uses all
buffered arr ∈ Arr where the timestamp of arrival lies
before the timestamp of starting the new traffic light
schedule and where no feedback messages arrived.
The algorithm also considers the specified length of
the whole light cycle ∆t
Cycle
, the total length of the
green period for all straight and right lanes ∆t
g
sr
, and
the total length of the green period for all left lanes
∆t
g
l
. First, the traffic intensity per wl is calculated.
Then, according to the intensities, the green periods
are calculated. Finally, the yellow periods of the wait-
ing lanes are calculated according to the given speed
limits.
Feedback. (TranVT) To further optimize the time of
loss at a junction, T L collects feedback f b of the ex-
perienced waiting time from V s. Using all received
f bs, T L can first calculate the actual t
w
j
of V
j
and then
find
∑
t
w
i,wl
k
for the i-th traffic light cycle and wl
k
. The
sum can be used to calculate the actual throughput per
wl. Putting this in relation to the theoretic throughput
allows the T L (via Q-Learning) to adjust the weights
~
α and to select specific actions via its selection policy
(Q-function).
Data: Arr, ∆t
Cycle
, ∆t
g
sr
, ∆t
g
l
,
~
α, speedlimit
wl
Result: ∆T
g
=
∆t
g
srv
,∆t
g
srh
,∆t
g
lv
,∆t
g
lh
, ∆t
y
wl
1 Calculate traffic intensity per wl:
2 Count arr per wl and store in A rr
wl
3 Traffic intensity per wl: q
wl
=
Arr
wl
∆t
Cycle
4 Define maximum of green period per wl:
5 ∆t
g,max
srv
= α
srv
· max(q
ns
,q
nw
,q
sn
,q
se
)
6 ∆t
g,max
srh
= α
srh
· max(q
we
,q
ws
,q
en
,q
ew
)
7 ∆t
g,max
lv
= α
lv
· max(q
ne
,q
sw
)
8 ∆t
g,max
lh
= α
lh
· max(q
wn
,q
es
)
9 Calculate ∆T
g
per green periods:
10 ∆t
g
srv
=
∆t
g,max
srv
∆t
g,max
srv
+∆t
g,max
srh
∆t
g
sr
11 ∆t
g
srh
= ∆t
g
sr
− ∆t
g
srv
12 ∆t
g
lv
=
∆t
g,max
lv
∆t
g,max
lv
+∆t
g,max
lh
∆t
g
l
13 ∆t
g
lh
= ∆t
g
l
− ∆t
g
lv
14 Set ∆t
y
wl
= round
speedlimit
wl
15
3.3 Attacks and Abuses
As in most V2X scenarios, two main security threats
arise, namely for privacy and integrity.
Traffic Light System. We assume that a traffic light
performs only passive attacks and is not actively ma-
nipulating traffic in a bad way (e.g. red light for
all W L ). The main objective is to track V s pass-
ing a junction controlled by the T L. It can there-
Algorithm 1: Traffic light logic calculation (TLLC) for the
four-phase-model.

fore record any received message and derive individ-
ual movement patterns. This threat becomes more
severe when multiple T Ls start exchanging informa-
tion about seen cars, allowing them to create location
trajectories. Precisely, the location privacy of a user
is threatened if (one or cooperating) T Ls are able to
find a list T = (T L
1
,... ,T L
n
) with n > 1 of traffic
lights passed during a trip. Knowing that list may be
used to identify a T L without the need for a unique
identifier (such as the ID of a OBU). Section 4.2 pro-
vides empirical proof that it is hard for different traffic
lights to link multiple scope-exclusive pseudonyms of
the same user. Adding additional information to a
pseudonym to facilitate linking is not possible due to
protocol design: the id(T L), TimeWindow, and H are
public knowledge. Other manipulation conflicts with
the public presentation policy.
Vehicle. In contrast, V s are considered untrustwor-
thy and thus try to actively influence a T L i.a. for
their own benefit. One can identify four different
goals. First, a V can change the impact of its mes-
sage by trying to appear towards a T L as multiple
vehicles (Sybil attack). Furthermore, it is possible
to send either a wrong time of arrival t
a
or a wrong
wl, both potentially resulting in inaccurate calcula-
tion of the traffic light schedule, eventually down-
grading service quality. Furthermore, in the context
of reinforced learning, not providing feedback to a
T L also may impact service quality. Sybil attacks
are prevented by a combination of key-bound cre-
dentials and scope exclusive pseudonyms, which are
indirectly also key-bound. Absolute privacy contra-
dicts the integrity of the system since vehicles can lie
without fearing any consequences, ultimately result-
ing in poor service quality. Therefore, privacy-ABC
systems introduce an (trusted) inspector (i.e. LEA)
who can reveal a V ’s identity under well-defined con-
ditions (i.e. policy conditions L) on request of a T L.
The inspection grounds are clear for all included par-
ties. since they are signed into the presentation token
in a tamper-proof way, protecting against malicious
T L.
Law Enforcement Agency. LEA has no knowledge
about package flow and payload because she is not in-
volved in the actual traffic light calculation procedure
and does not participate in V2X communication. She
is bound to the inspection policy which every partic-
ipant in the system agrees on. Hence, she is unable
to illegitimately reveal the identity of a V . Therefore,
she has to use pseudonyms in the same way cooperat-
ing T L do and does not have additional knowledge.
External Eavesdropper. Like T Ls, external entities
can also have an interest in deriving individual move-
ment patterns. However, similar to LEA, external
eavesdroppers need to link pseudonyms in order to
derive a location trajectory.
Furthermore, the system allows revoking a spe-
cific set of attribute values without revealing the ac-
tual values. The revocation process can be triggered
either by a V or a T L. For example, revocation can be
used by a car owner if his V gets stolen.
4 EVALUATION
We now evaluate iTLM with the reinforcement learn-
ing extension in order to assess performance, privacy
and emission aspects.
Simulation Environment. We evaluated our ap-
proach using SUMO, which is a microscopic simula-
tor for urban mobility. Our testbed is a standard 4-arm
intersection with |W L| = 12 according to our system
model. Traffic light switching schedules can be con-
trolled in SUMO, using tlLogic elements with states
G,g,y,r applied
1
. Each simulation was run for 900
simulation seconds, resulting in 10 traffic light cycles
for a fixed time (STA) approach, an actuated approach
using induction loops in every wl (ACT ), and our new
dynamic traffic light logic (TLL) approach. The eval-
uation is accomplished with real-world data from the
City of Hamburg
2
in Germany. The traffic counts of
three years illustrate the traffic densities of all roads
in the annual average weekday traffic, that was bro-
ken down to provide a realistic simulation and come
up with feasible results.
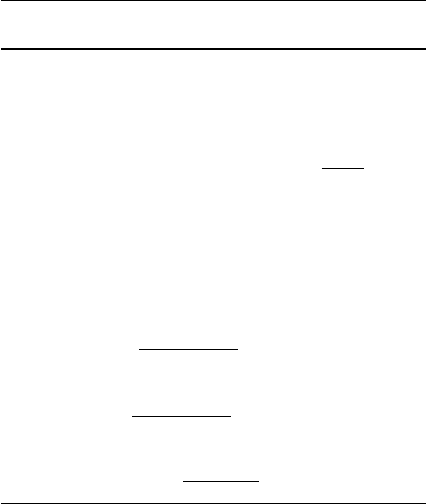
Scenarios. We formulate three hypotheses (H1-3)
which are evaluated in six traffic scenarios. Fig. 2
illustrates the spawn frequency of vehicles/sec in re-
lation to the simulation cycle. Exit lanes are selected
with a static distribution.
H1. TLL is capable to quickly adapt the green light
phase to alternating traffic flow intensities.
H2. TLL is capable of detecting and monitoring the
rush direction while adapting to changing inten-
sities.
H3. TLL is capable of reacting to asymmetric incom-
ing lanes and prefers the major arteries.
4.1 Performance
In order to evaluate the performance, we focus on the
waiting time of V s and the related traffic density. The
1
sumo.dlr.de/docs/Simulation/Traffic Lights.html
2
www.hamburg.de/bwvi/verkehrsbelastung/
2 4
6
8 10
0
0.5
1
f [veh/s]
S1
2 4
6
8 10
0
0.5
1
S2
2 4
6
8 10
0
0.5
1
S3
2 4
6
8 10
0
0.5
1
S4
2 4
6
8 10
0
0.5
1
S5
2 4
6
8 10
0
0.5
1
S6
simulation cycle [#]
Hypothesis 1 Hypothesis 2 Hypothesis 3
Spawn:
n e
s
w
Figure 2: Overview of all scenarios used to verify our hypotheses.
S1 S2 S3 S4 S5 S6
0
5
10
15
20
25
30
35
40
Scenario
∑
Waiting Time [h]
0
5
10
15
20
25
30
35
40
45
∆ Waiting Time [%]
∑
ACT
∑
STA
∑
TLL
∆ TLL/STA ∆ TLL/ACT
Figure 3: Overview of performance for all approaches
across all scenarios.
waiting time defines the overhead of time spent dur-
ing the simulation because of waiting periods at the
junction (i.e. red lights). Due to space constraints, we
can only highlight some particularities.
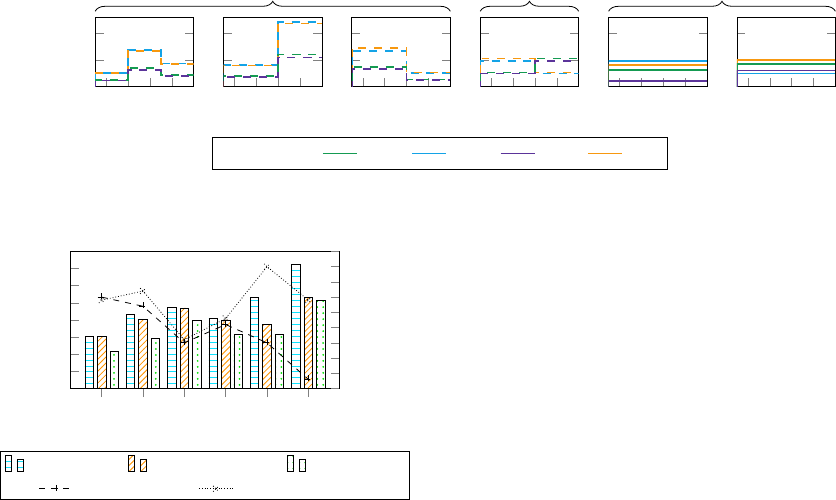
Figure 3 gives a thorough overview of the total
waiting time of vehicles and shows that our TLL re-
duces the waiting time in every scenario.
Figure 4a gives insight into the scenario S1. At the
beginning, there is not much difference in the perfor-
mance because the road network is slowly filling up
with cars. However, it can be seen that with a rapidly
increasing number of vehicles during rush hour (cy-
cle 4-6), TLL can adapt to this situation and is able
to convey the increasing number of cars, resulting in
30% less waiting time and lower overall density. TLL
achieves this by increasing the green period for the
high traffic flow horizontal lane (c.f. Fig. 4b).
The results of S2 and S3 illustrate a major deficit
of the classical methods. In fact, the more vehicles
are in the system, the worse ACT performs, because
light cycles are changed when a timeout is reached
(all bars have similar heights). Regarding green times,
the actuated system detects ongoing cars on the lanes
and hence keeps the lane on priorities, i.e. giving it
green light. However, due to an overcrowded junc-
tion, vehicles are unable to leave it on their target lane.
TLL however, is able to count the incoming number
of cars and then prioritize the lanes with the highest
count. This may lead to an unbalanced light cycle
where less dense lanes are neglected for the sake of
the majority. Fig. 5 illustrates that vividly for S2: it
is easy to understand that lanes going straight or right
have a much higher throughput then left turns since
this always conflicts with other participants and over-
all allows lesser directions to drive. TLL draws the
right conclusions independently: It detects that major
traffic goes e ↔ w and since left turns have a lower
throughput, their time has to be increased in the TLL
high scenario. Also, TLL relinquishes the less dense
vertical direction by giving it small amounts of green
time. H1 can thus be considered to be confirmed.
To confirm H2 we use S4. We can see from Fig. 6
that TLL detects the change of the major traffic axes,
and thus intelligently optimizes the green light peri-
ods. This results in less waiting times at red lights
(TLL: ∅ 15.8 sec, ACT: ∅ 20.5 sec, STA: ∅ 20.0 sec).
S5 and S6 show TLL’s advantage more distinctly.
TLL is able to calculate the distribution of all lane
combinations. Hence it is able to correctly priori-
tize lanes e,n,w in S5, resulting in much shorter wait-
ing times compared to the other two approaches (see
Fig. 3). In fact, ACT performs worse for this high
density scenario with a sum of 26.5 hours of waiting
after the simulation. STA achieves 18.6 hours while
our TLL approach shines with 15.8 hours (less than
40% of ACT). Interestingly enough, in S6 this picture
repeats, although TLL calculates traffic light sched-
ules very similar to the STA model (s+r 33 ± 2 sec-
onds, l 6 ± 2 seconds). We assume that the benefit
compared to STA is rather low because the number of
vehicles from horizontal and vertical lanes is similar
making equally distributed green phases feasible by
coincidence. ACT fails again by almost evenly dis-
tributing the green light period between all lanes, un-
able to detect and clean a blocked junction. Finally,
we can confirm H3.
4.2 Impact of PET
We now discuss some important privacy impacts of
our system as it was designed to enable privacy-by-
1 2 3 4
5 6
7 8 9 10
0
2,000
4,000
6,000
8,000
10,000
12,000
14,000
Morning → Rush →
Day →
Simulation Cycle
Bars: Waiting Time [s]
0
5
10
15
20
25
Lines: Density [veh/km]
ACT STA TLL
(a) Running total of waiting time and average of density.
1 2 3 4
5 6
7 8 9 10
0
10
20
30
40
50
60
70
80
Simulation Cycle
Green Period [s]
h,s+r v,s+r
h,l v,l
(b) Green periods of TLL.
Figure 4: Performance results for S1.
low high low high
0
10
20
30
40
50
60
ACT
TLL
Average Traffic Flow [phase]
Green Period [%]
h,s+r v,s+r h,l v,l
Figure 5: Green periods per approach and phase of S2.
1 2 3 4
5 6
7 8 9 10
0
10
20
30
40
50
60
70
80
Simulation Cycle
Green Period [s]
h,s+r v,s+r h,l v,l
Figure 6: TLL adapts the green periods to the orientation
change in S4.
design. In particular, we want to find out how robust
the system is in terms of integrity and anonymity. We
do not focus on the communication layer since it is
based on ABC4Trust.
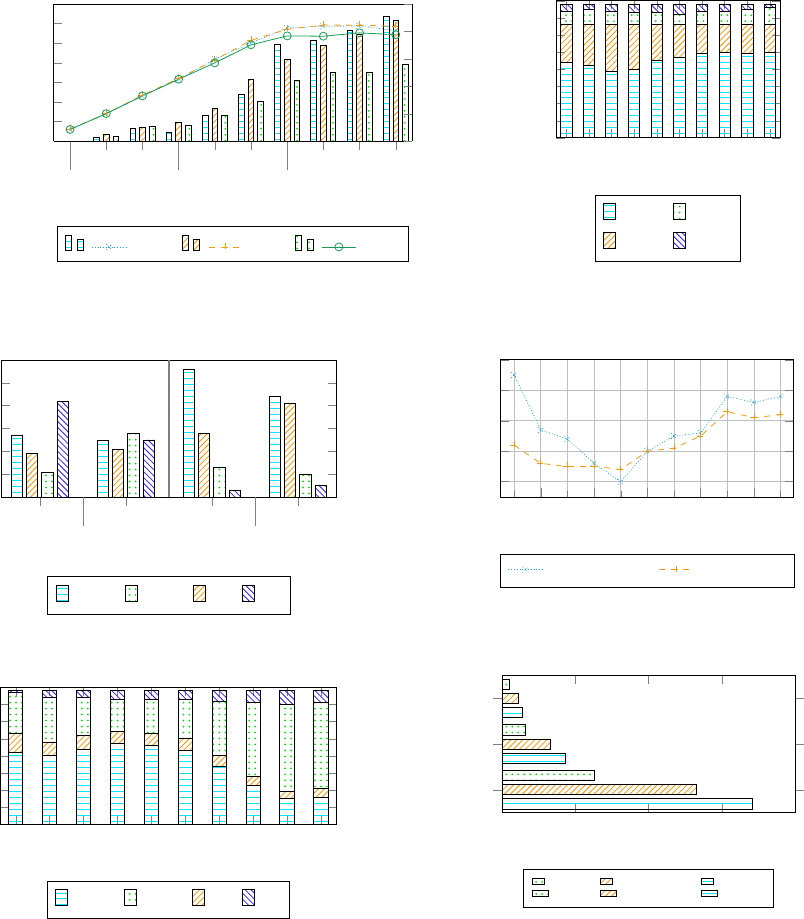
When talking about integrity, the two transmitted
parameters wl and t
a
by a V are of interest. If a V
sends another wl, then it falsifies the actual number
of vehicles per waiting lane, similar to reducing the
number of participants (see Figure 7). Also sending a
wrong t
a
or not receiving data at all (equals not partic-
−40 −20 0 20 40
−10
0
10
20
30
Deviation [%]
Change [%]
waiting time travel time
Figure 7: Deviation of KPI in the non-optimal case where
not all cars are participating (S3).
0
50
100
150
200
Junction
Street
WL
171
43
14
133
33
11
63
16
5
vehicles [#]
Low Medium High
Figure 8: k-anonymity at traffic light for different vehicle
densities (one light cycle).
ipating vehicles) might influence the calculation. Fig-
ure 7 shows that the calculation is, of course, influ-
enced when corruption happens, although the system
can handle inaccuracies regarding transmitted infor-
mation. If the inaccuracies are similarly distributed
as the occurrences of the vehicles, TLL distributes 90
seconds of a light cycle accordingly, resulting in a fea-
sible light schedule. If this is not the case, T L can
rely on f b to gain information about that current dis-
tribution to update its internal policy. In this manner,
targeted denial of service attacks can be identified and
handled appropriately.
From Fig. 8, one can see that even with low traf-
fic, on average, five vehicles pass a junction in a sin-
gle queue. Therefore, these five vehicles form a k-
anonymity set of 5 as long as nobody can derive in
which order they arrive at and leave the junction. Al-
though the presentation tokens are generally crypto-
graphically unlinkable and untraceable, conclusions
could be drawn from the content or time of transmis-
sion. Therefore, it is necessary that V communicate
independently of their location with T L and that the
arrival time is not exact to the second, but should be
given in buckets of e.g. 5 seconds. The independence
from the location can be achieved by sending the mes-
sages to the traffic light with a random delay.
5 CONCLUSION
Here, we proposed an intelligent traffic light system
using crowdsourced user input transferred via V2X to
optimize the traffic light cycle and thus reduce overall
waiting time and emissions. A simulation has shown
that up to 40% of waiting time can be reduced in com-
plex situations. Therefore, the emissions can also be
lowered by around 5 % for the same number of vehi-
cles. This is done by i.a. avoiding unneccessary stops.
Furthermore, our approach achieves a significant level
of privacy by adapting ABC4Trust to our needs.
For future work, we plan to analyze the poten-
tial of our approach by extending the range of in-
formation available, i.e. interconnecting the traffic
light network, allowing two or more traffic lights to
exchange information and knowledge. However, the
impact of privacy for vehicles has to be taken into ac-
count. Our existing k-anonymity results only allow a
specific level of interconnection, which is of further
interest. Furthermore, we want to analyse the influ-
ence of even more flexible light schedules.
REFERENCES
Abuelsamid, S. (2019). Volkswagen Adds ‘Vehicle-
To-Everything’ Communications To Revamped Golf
With NXP Chips.
Arel, I., Liu, C., Urbanik, T., and Kohls, A. G. (2010). Rein-
forcement learning-based multi-agent system for net-
work traffic signal control. IET Intelligent Transport
Systems, 4(2).
Blumberg, A. J., Keeler, L. S., and Shelat, A. (2005). Auto-
mated traffic enforcement which respects ”driver pri-
vacy”. In IEEE Conference on Intelligent Transporta-
tion Systems, Proceedings, ITSC, volume 2005.
Darroch, J. N., Newell, G. F., and Morris, R. W. J. (1964).
Queues for a Vehicle-Actuated Traffic Light. Opera-
tions Research, 12(6).
Gao, J., Shen, Y., Liu, J., Ito, M., and Shiratori, N. (2017).
Adaptive Traffic Signal Control: Deep Reinforcement
Learning Algorithm with Experience Replay and Tar-
get Network. Technical report.
Gao, K., rong Han, F., fei Wen, M., hua Du, R., Li, S., and
Zhou, F. (2019). Coordinated control method of in-
tersection traffic light in one-way road based on V2X.
Journal of Central South University, 26(9).
Li, Y. (2012). Netzweite Lichtsignalsteuerung auf Basis
Rekurrenter Neuronaler Netze. Dissertation, Technis-
che Universit
¨
at M
¨
unchen.
Liang, X., Du, X., Wang, G., and Han, Z. (2019). A Deep
Reinforcement Learning Network for Traffic Light
Cycle Control. IEEE Transactions on Vehicular Tech-
nology, 68(2).
Nirmani, A., Thilakarathne, L., Wickramasinghe, A.,
Senanayake, S., and Haddela, P. S. (2018). Google
Map and Camera Based Fuzzified Adaptive Net-
worked Traffic Light Handling Model. In 2018 3rd
International Conference on Information Technology
Research, ICITR 2018. Institute of Electrical and
Electronics Engineers Inc.
Pfitzmann, A. and Borcea-Pfitzmann, K. (2010). Lifelong
privacy: Privacy and identity management for life.
In IFIP Advances in Information and Communication
Technology, volume 320. Springer New York LLC.
Rachmadi, M. F., Al Afif, F., Jatmiko, W., Mursanto, P.,
Manggala, E. A., Ma’sum, M. A., and Wibowo, A.
(2011). Adaptive traffic signal control system using
camera sensor and embedded system. In TENCON
2011 - 2011 IEEE Region 10 Conference. IEEE.
Sabouri, A., Krontiris, I., and Rannenberg, K. (2015).
Attribute-based Credentials for Trust. Springer Inter-
national Publishing, Cham.
Schaub, F., Ma, Z., and Kargl, F. (2009). Privacy re-
quirements in vehicular communication systems. In
Proceedings - 12th IEEE International Conference on
Computational Science and Engineering, CSE 2009,
volume 3.
Steingr
¨
over, M., Steingr
¨
over, M., Schouten, R., Peelen, S.,
Nijhuis, E., and Bakker, B. (2005). Reinforcement
learning of traffic light controllers adapting to traffic
congestion. Benelux Conference on Artificial Intelli-
gence, BNAIC 2005.
Varga, N., Bokor, L., Takacs, A., Kovacs, J., and Vi-
rag, L. (2017). An architecture proposal for V2X
communication-centric traffic light controller sys-
tems. In Proceedings of 2017 15th International Con-
ference on ITS Telecommunications, ITST 2017. Insti-
tute of Electrical and Electronics Engineers Inc.
Wiedersheim, B., Ma, Z., Kargl, F., and Papadimitratos, P.
(2010). Privacy in inter-vehicular networks: Why sim-
ple pseudonym change is not enough. In WONS 2010 -
7th International Conference on Wireless On-demand
Network Systems and Services.
Xing, S.-Y., Lian, G.-L., Yan, D.-Y., and Cao, J.-Y.
(2018). Traffic Signal Light Optimization Control
Based on Fuzzy Control and CCD Camera Technol-
ogy. DEStech Transactions on Computer Science and
Engineering, (cmsms).
