
Superlinear and Bandwidth Friendly Geo-replication
for Store-and-forward Systems
Daniel Brahneborg
1 a
, Wasif Afzal
2 b
, Adnan
ˇ
Cau
ˇ
sevi
´
c
2 c
and Mats Bj
¨
orkman
2 d
1
Infoflex Connect AB, Stockholm, Sweden
2
M
¨
alardalen University, V
¨
aster
˚
as, Sweden
Keywords:
Store-and-forward, Replication, SMS.
Abstract:
To keep internet based services available despite inevitable local internet and power outages, their data must
be replicated to one or more other sites. For most systems using the store-and-forward architecture, data loss
can also be prevented by using end-to-end acknowledgements. So far we have not found any sufficiently good
solutions for replication of data in store-and-forward systems without acknowledgements and with geograph-
ically separated system nodes. We therefore designed a new replication protocol, which could take advantage
of the lack of a global order between the messages and the acceptance of a slightly higher risk for duplicated
deliveries than existing protocols. We tested a proof-of-concept implementation of the protocol for throughput
and latency in a controlled experiment using 7 nodes in 4 geographically separated areas, and observed the
throughput increasing superlinearly with the number of nodes up to almost 3500 messages per second. It is
also, to the best of our knowledge, the first replication protocol with a bandwidth usage that scales according
to the number of nodes allowed to fail and not the total number of nodes in the system.
1 INTRODUCTION
Many services are accessed over the internet, mak-
ing them vulnerable to “inevitable, frequent, opaque,
expensive, and poorly understood” internet out-
ages (Aceto et al., 2018). Outages caused by net-
work failures are only opaque for the users when the
packets can be routed another way or to a different
destination. If the service runs on a single server or
even in a single data-center, from the perspective of
the clients accessing it, it is therefore not a matter of
“if, but rather when” it will fail (Yousif, 2018).
Internet outages caused by local
1
non-deliberate
reasons, e.g., power blackouts, fires, and earth-
quakes, may affect an area of up to 1000 square
km with a time-to-recover in the order of hours or
days (Cetinkaya and Sterbenz, 2013). For a service
to remain accessible during such an outage, it must
therefore run on multiple servers in independent and
geographically separated data centers, possibly even
a
https://orcid.org/0000-0003-4606-5144
b
https://orcid.org/0000-0003-0611-2655
c
https://orcid.org/0000-0001-8009-9052
d
https://orcid.org/0000-0002-2419-2735
1
There is obviously not a lot that can be done about out-
ages on a global scale.
on different continents. However, replicating data be-
tween such servers can be problematic due to lim-
ited network bandwidth and long round-trip latencies
(“digital information travels along fiber optic cables at
almost exactly 2/3 the speed of light in vacuum [...]
the mnemonically very convenient value of 1ms RTT
[round-trip time] per 100km of cable” (Percacci and
Vespignani, 2003)).
Much of the internet traffic today is to web ser-
vices, with clients accessing servers assumed to be
consistent between each other. However, the CAP
conjecture by Brewer (Brewer, 2000), later proven by
Gilbert and Lynch (Gilbert and Lynch, 2004), states
that the expected behaviour for a web service prevents
it from being both Consistent, Available and Parti-
tion tolerant at the same time. If partition tolerance
is a given, the system can, for instance, either sacri-
fice consistency by allowing read operations without
first verifying the data with the other nodes, or sac-
rifice availability by disallowing read operations en-
tirely. In either case, the response times from the sys-
tem can be reduced, and throughput increased, by us-
ing only a subset of the system nodes (Thomas, 1979),
(Maekawa, 1985), (Kumar, 1991) (as opposed to all
of them (Ricart and Agrawala, 1981)) to manage con-
sistency.
328
Brahneborg, D., Afzal, W.,
ˇ
Cauševi
´
c, A. and Björkman, M.
Superlinear and Bandwidth Friendly Geo-replication for Store-and-forward Systems.
DOI: 10.5220/0009835403280338
In Proceedings of the 15th International Conference on Software Technologies (ICSOFT 2020), pages 328-338
ISBN: 978-989-758-443-5
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

To ensure data consistency in a replication proto-
col, the number of nodes to which read operations are
replicated, denoted as R, plus the number of nodes
to which write operations are replicated, denoted as
W , must always be strictly larger than n (Ahamad
and Ammar, 1989). For example, we can set R =
W = d(n + 1)/2e for all operations. This gives us
f = b(n −1)/2c as the number of nodes allowed to
fail before there is a risk for data loss or inconsisten-
cies. To optimize performance of read operations, a
common replication method, used by e.g. Redis
2
and
Spread
3
, is to simply broadcast all updates to all nodes
in the system, either directly or via an elected master.
This corresponds to the case where W = n and R = 1,
which obviously satisfies R +W > n.
Broadcasting the operations allows the client to
use any one of the n nodes to perform the required
operations, which is critical for functionalities such
as shopping carts. An item added to a shopping cart
in a request to one web server node, should still be
there when when another request, which is routed to
another web server node, adds a second item to the
cart. However, as n increases, the required bandwidth
for the data replication using existing methods also
increases, in the order of kn per node.
Despite their popularity, we will not consider web
servers in this work. Instead we will focus on the
requirements for a replication protocol as it would
be used by a store-and-forward system, a software
architecture which provides a buffer between pro-
ducers and consumers of data (Eugster et al., 2003).
This architecture decouples producers and consumers
in time, thereby allowing them to work at different
paces. It also gives the possibility to dynamically add
and remove consumers in response to varying loads
from the producers.
Store-and-forward systems have an important trait
as compared to a more general data storage: there are
no external readers. Once a data tuple has been re-
ceived and stored by the system, it is up to the system
itself to select which tuple is going to be forwarded
next, and by which node. The case of a reader ac-
cesses accessing a random node to request the value
of a particular data tuple, simply does not manifest
itself in these systems.
Ensuring a consistent relative order between the
data tuples is now the only remaining reason to broad-
cast read and write operations to a majority of the
nodes. If this ordering requirement can be disre-
garded, as is the case for data tuples representing in-
dependent or commutative operations (Shapiro et al.,
2011), we can fundamental change the replication
2
https://redis.io
3
http://www.spread.org
logic. Under these conditions, a store-and-forward
system can freely choose any f + 1 nodes for the stor-
age of each data tuple, and any subset of f nodes can
still fail without risking data loss.
This work aims to define a data replication proto-
col specifically tailored for store-and-forward systems
handling independent data tuples. The bandwidth re-
quired for the replication should be less than the or-
der of kn per node, to avoid using most of the band-
width replicating the data tuples as opposed to deliv-
ering them. Ideally, the replication overhead should
be in the order of kf per node. Each data tuple should
be forwarded only once, though a minuscule number
of duplications are acceptable in exceptional circum-
stances. We do not specify this requirement as simply
“at least once”, because that would allow for all data
tuples to be forwarded repeatedly which breaks the
bandwidth requirement.
The replication protocol we will describe in this
work satisfies the aforementioned requirements, and
allows replication writes in all network partitions with
at least f +1 nodes. We claim the following contribu-
tions in relation with this protocol.
1. A high level description of its functionality.
2. An open sourced proof-of-concept implementa-
tion of the data replication parts of the protocol.
3. A performance analysis on throughput and la-
tency, both when deployed within a local network
and for a geo-distributed system configuration.
Following this introduction is a description of the
assumptions we have made about our system model,
and a sample application context. Section 2 describes
the proposed protocol. Section 3 describes the exper-
iment conducted to evaluate its performance, with the
results presented in Section 4 and discussed in Sec-
tion 5. Finally, Section 6 discusses related work, and
Section 7 holds conclusions and possible future work.
1.1 System Model
Our system model comprises a collection of n nodes,
named node
1
,node
2
,. ..,node
n
. Each node can ex-
change data with any other node, and may join and
leave the system at any time. The nodes are crash-
recovery, so they may also rejoin after crashing. Our
model is asynchronous as the nodes may be geograph-
ically distant from each other.
In accordance with the store-and-forward archi-
tecture, we have a set of producers and consumers,
each one connected to a subset of the system nodes.
Data tuples are received from producers, stored in
a local queue and subsequently forwarded to one of
the consumers, after which they are removed from
Superlinear and Bandwidth Friendly Geo-replication for Store-and-forward Systems
329
the queue. The data tuples are therefore managed
by the store-and-forward application for a relatively
short time, typically less than 1second.
The data tuples contain the following fields.
id
A globally unique id.
payload
Opaque application specific payload.
owners
An ordered list of f + 1 unique node identifiers.
The first node referenced in this list is the one
which originally received this tuple, and the re-
maining nodes are the data tuple specific failover
nodes.
Security concerns such as authentication and en-
cryption are not part of the model. There are also no
byzantine failures (Lamport et al., 1982), with nodes
sending arbitrarily erroneous data.
1.2 Example Application
One application area matching our system model is
application-to-human messaging, e.g. an SMS gate-
way. Such gateways are used by SMS brokers, con-
necting clients via internet to mobile network opera-
tors. These clients are companies sending authenti-
cation codes, meeting reminders and similar informa-
tion. Using SMS for these messages is convenient,
as this technology makes it possible to reach all cus-
tomers without requiring any additional software on
their mobile phones. Figure 1 shows a schematic view
of this setup. In this use case, the replication would
be done between multiple SMS gateways belonging
to the same SMS broker, without affecting the proto-
cols towards the client companies or the operators.
We will use an SMS gateway for the motivation of
various assumptions and decisions throughout this pa-
per. For example, n is in this context typically at most
10, and f at most 2. The payload field in the data tuple
consists of the sender’s and recipient’s phone num-
bers, the message text, and possibly additional other
information.
Company 1 Broker Operator 1
Operator 2Company 2
Figure 1: Companies sending text messages, an SMS bro-
ker, and mobile network operators.
2 PROPOSED SOLUTION
We now describe our proposed replication protocol,
named GeoRep, for use between n nodes, of which f
nodes can fail without data being lost. A program, Ex-
ampleApp, is running on each node, using a context
independent subsystem implementing the replication
protocol.
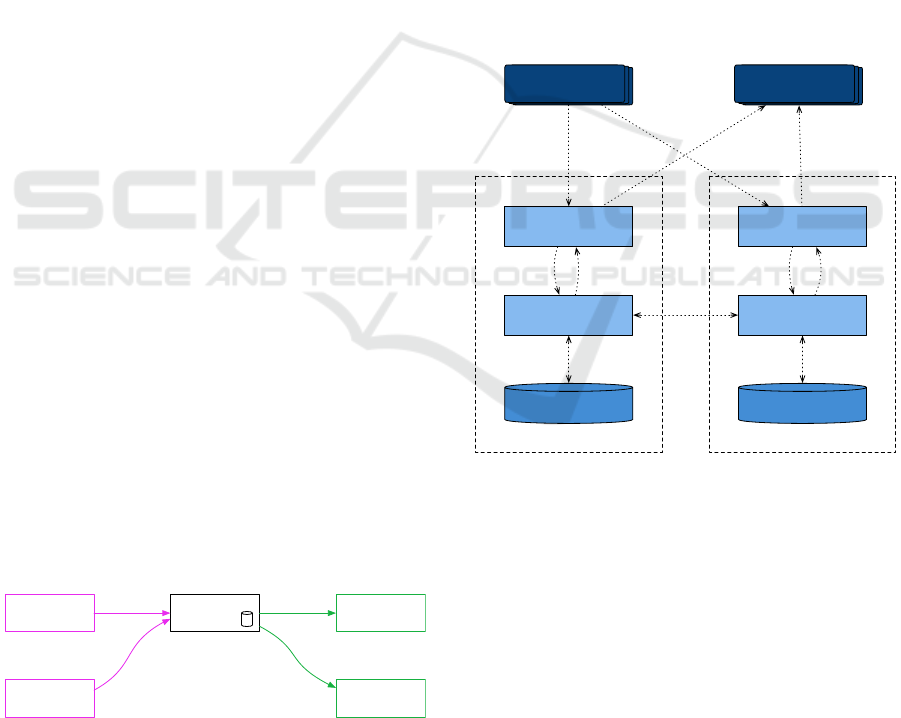
The main data flows for the case with two nodes
are shown in Figure 2. A producer, of which there
may be many, sends data to ExampleApp on one of
the nodes. ExampleApp then tells GeoRep to store
the data in its persistent storage, and replicate it to
the other node. When ExampleApp has forwarded
the data to a consumer, it tells GeoRep to delete the
data on all nodes. The GeoRep modules communicate
with each other for replication and failure detection.
When a failed node has been observed, GeoRep tells
ExampleApp to forward the data tuples adopted from
the failed node.
node 1 node 2
ExampleApp
Producer
GeoRep
Data Tuple Storage
Consumer
ExampleApp
GeoRep
Data Tuple Storage
store
delete
store
delete
adopt adopt
store forward
Figure 2: Architecture overview for ExampleApp running
on two nodes.
2.1 Protocol Description
We here describe the activities done when GeoRep
starts and stops, how data is replicated, and how node
failures are handled. All use cases in this section are
described from the viewpoint of an individual node.
2.1.1 Startup
At startup, the application layer in ExampleApp pro-
vides the selected value for f to its GeoRep subsys-
tem, and an initial list of other nodes. GeoRep first
ICSOFT 2020 - 15th International Conference on Software Technologies
330
loads any previously stored data tuples into appropri-
ate data structures in memory. It then waits for con-
tact requests, while also trying to make contact with
the other nodes.
In response to a contact request from node
x
, Geo-
Rep returns a welcoming message with its list of cur-
rently known nodes. This list includes temporarily
stopped nodes and their expected return times (see
Section 2.1.3, “Failover”, below). The contacted node
informs the others about node
x
. Node
x
tries to con-
nect to the existing nodes, getting their respective lists
of known nodes. If any node gets an update during
this phase, the full list is broadcast to all other nodes.
If the expected return times for a specific node dif-
fers, the maximum value is used. Eventually, this will
converge, from which point all nodes send periodic
heartbeats to all other nodes unless other data has re-
cently been sent.
If a node returns after a short time, each wel-
coming message will also contain the list of entries
adopted by each node. These entries can then be re-
moved by the returning node to avoid duplications.
2.1.2 Replication
The application layer in ExampleApp requests an en-
try to be replicated. GeoRep creates a list of f other
nodes known to be alive out of the existing n−1 ones,
putting it in the owners field of the entry. If f > n −1,
this fails immediately.
The entry, plus the owners field, is replicated to
the f nodes. Once all those nodes have responded,
control returns to the application. If multiple threads
request entries to be replicated at the same time, these
are all sent as a single network packet. When receiv-
ing an entry from another node, it is stored locally
and a response sent back, but no other action is taken.
Figure 3 shows the replication when n = 5 and f = 2.
2.1.3 Failover
If nothing is received on node
1
from node
2
for some
time, node
1
suspects node
2
to be dead. After this, no
more entries are replicated to node
2
until node
2
sends
something to node
1
again.
The reason for this lost connection may be a net-
work outage, leaving multiple isolated subsets of the
original n nodes still in contact with each other. Each
network partition with such a subset of nodes can
continue to run as before, as long as their set size is
greater than f .
After some configurable time, or after the recov-
ery timeout given by node
2
when it exited, node
2
is
considered dead. If node
1
ends up as the first node
Producer
node5
node4
node3
node2
node1
payload: x id: 42
payload: x
owners: 1,3,4
Figure 3: Replicate a payload to a subset of size 2 of the 5
known nodes, here nodes 3 and 4. Nothing is sent to nodes
2 and 5.
in the owners list for one or more entries, the appli-
cation is notified, one entry at a time. The identifiers
of the adopted and successfully sent entries are stored
for a limited time, making it possible to notify node
2
should it return.
As node
1
knows the identifiers of the rest of the
nodes to which each entry was replicated, it will try
to inform those nodes about updated statuses. Only
the nodes in the owners list will ever send updates
and deletes for a particular entry.
2.1.4 Exiting
When ExampleApp exits and tells GeoRep to shut
down, this is broadcast to all other nodes, including
a timeout for when the node expects to be back. This
timeout is also stored locally. The timeout tells the
other nodes when they can start adopting that node’s
messages. If the original node comes back after the
timeout has expired, it can assume all of its messages
have been adopted by the other nodes.
2.2 Duplication Analysis
We now consider the cases that can occur in the same
situation as in Section 2.1.2, when n = 5 and f = 2,
and a message is replicated from node
1
to node
3
and
node
4
. The cases are shown in Figure 4. Neither
node
2
nor node
5
have ever heard of this message, so
whether they remain in contact with the other nodes
does not matter.
Superlinear and Bandwidth Friendly Geo-replication for Store-and-forward Systems
331

A. As long as node
1
is alive, it will try to deliver the
message to the consumer, and the statuses of the
other nodes do not matter.
B. If node
3
concludes that node
1
is dead or for some
other reason unreachable, it will adopt the mes-
sage and try to deliver it.
C. If node
4
loses contact with both node
1
and node
3
,
it will then try to deliver the message itself.
node5
node4
node3
node2
node1
Consumer
dead?
dead?
dead?
A
B
C
Figure 4: Possible duplications.
There is no way for a node to know if any of the
other nodes are dead or are unreachable for another
reason. In case multiple nodes can communicate with
the consumer but not with each other, messages could
therefore be duplicated. The probability for this is
low, and these duplications are therefore acceptable.
We consider it much more likely that a lost node is
dead or has lost internet connectivity entirely, and
thereby also the connectivity to the consumer. In both
cases the message is delivered only once.
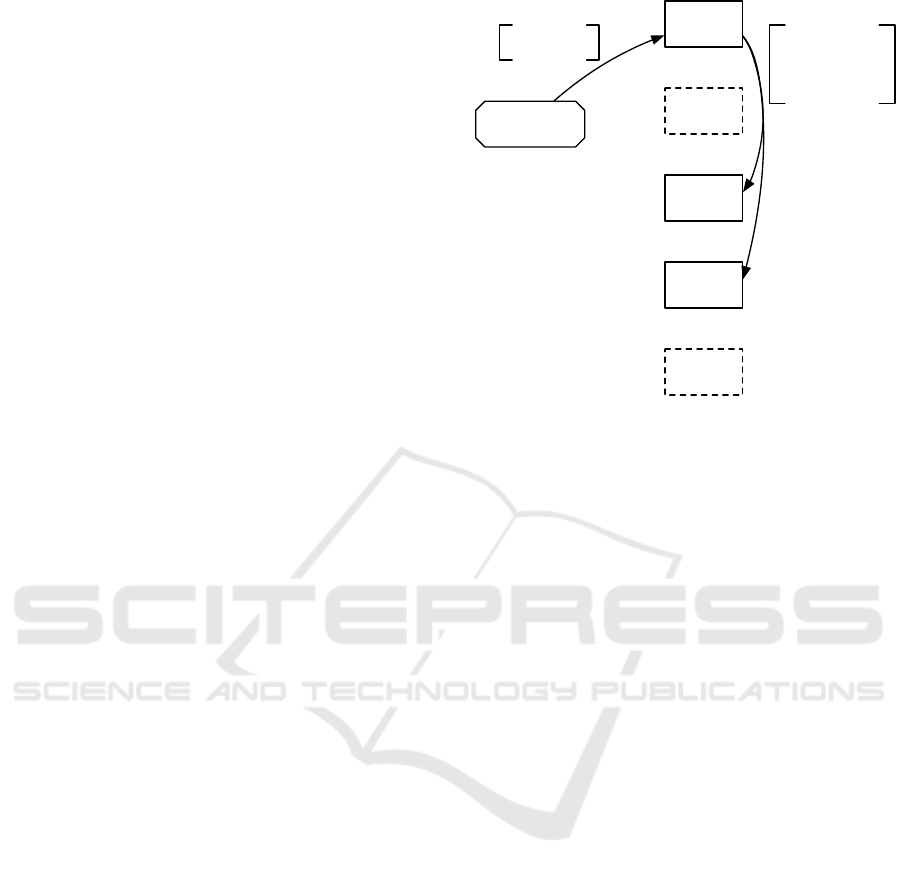
2.3 Data Tuple Lifecycle
Figures 5 and 6 illustrate the replication and failover
from the perspective of a data tuple. The Inactive
state has a dashed border to show that it is a passive
state, waiting on an externally initiated event. The
solid arrows arrows represent state changes on the
first node, and dotted arrows on the failover nodes.
First, in Figure 5, a producer sends the data tu-
ple to some node, whereby the data tuple enters the
Received state. This corresponds to the arrow from
Producer to node1 in Figure 3. Next, this node sets
the owners field, and replicates the updated data tuple
to the selected failover nodes, where they are stored in
Inactive
DeletedForwarded
Stored
ReceivedT
to first node
T
delete
replicate
to failover
nodes
on delete
Figure 5: The lifecycle of each data tuple on the first node.
Inactive
DeletedForwarded
Stored
T
T
from
first
node
earlier
nodes
dead
delete
Figure 6: The lifecycle of a data tuple in case of failover.
the Inactive state. In Figure 3, these are the arrows
on the right, from node1 to node3 and node4. When
the failover nodes have confirmed this operation, the
data tuple on node1 moves to state Stored. It stays in
this state until the application has forwarded the data.
In the normal case, the application will forward
any data tuple in the Stored state, and then move
them to the Forwarded state. This instructs GeoRep
to inform the failover nodes, i.e., node3 and node4 in
Figure 3, that this data should be deleted. Finally, the
data tuple is removed from the local storage in Geo-
Rep on the first node as well.
Figure 6 illustrates the cases shown as B and C in
Figure 4, when a failover node discovers that all ear-
lier nodes in the owners field no longer respond to its
ICSOFT 2020 - 15th International Conference on Software Technologies
332

heartbeat requests. It then moves the data tuple from
state Inactive to Stored, and informs the applica-
tion about this change. The lifecycle then proceeds
as above, causing the data tuple to be forwarded and
then deleted on any remaining failover nodes. As de-
scribed in Section 2.2, there is a possibility for the
same data tuple to enter the Stored state and there-
fore be forwarded by multiple nodes. We do not need
to create a mechanism to prevent that, as such dupli-
cation are acceptable according to our requirements.
2.4 Source Code
The source code, consisting of about 3500 lines of C,
is publicly available
4
. This includes both the proof-
of-concept implementation of the replication protocol
and the test application and scripts used in the exper-
iment described next.
3 EXPERIMENT
For a study of the proposed protocol, we designed a
controlled experiment (Robson and McCartan, 2016).
The goal was to evaluate the throughput with a vary-
ing number of clients and servers in a few different
configurations.
3.1 Tasks
A common benchmark suite for replication systems
is the Yahoo! Cloud Serving Benchmark (YCSB)
(Cooper et al., 2010), which exists in several differ-
ent versions with varying proportions between writes
and reads. Using this suite makes it easy to com-
pare different solutions, but as it is designed for web
server type systems and not store-and-forward sys-
tems, YCSB was not meaningful for us. Instead,
we used a sequence of tasks corresponding with the
queue related operations performed by this type of
systems. The test application created the messages
itself, and discarded them when all tasks described
below were completed.
1. A new message was stored. The application
waited for acknowledgements from the required
number of servers.
2. A message was extracted from the queue.
3. The extracted message was deleted.
4
https://bitbucket.org/infoflexconnect/
leaderlessreplication
3.2 Factors
Due to the nature of the experiment, we were able
to use a fixed design (Wohlin et al., 2012). In addi-
tion to the usual Independent and Dependent factors,
we found it relevant to describe the independent fac-
tors that we set to constant values, and the dependent
factors which we chose to ignore. These are all de-
scribed in more detail below, and summarized in Ta-
ble 1. The throughput is measured in messages per
second (MPS).
Table 1: Experiment factors.
Type Factor Value(s)/Unit
Independent
Servers, n 1, 3, 5, 7
Clients 1, 3, 10, 30, 100
Separation Local, Remote
Constant
Protection, f 1
Transient 5s
Steady-state 30s
Dependent
Throughput MPS
Min RTT Microseconds, µs
Ignored
Recovering MPS
Duplications Ratio
3.2.1 Independent Factors
The primary factors in this experiment were selected
to give a deeper understanding of the behaviour in dif-
ferent circumstances.
The number of servers was varied from 1 to 7.
Testing a replication method on a system with a single
server may seem strange, but this gave a baseline so
we could observe the cost of the increased data safety
provided by the replication.
Next, the number of client connections was varied
with a ratio of about 3 from 1 to 100. A real sys-
tem would have more clients than 100, but it would
also run on machines with more resources than we
had available for this experiment.
Finally, we used servers both within the same data
center and in multiple time-zones. The physical dis-
tances between the servers showed the effect of high
round-trip times.
3.2.2 Constants
The number of nodes that would be allowed to fail,
f , was set to 1 for all tests. A higher value for f
would mainly lead to more network traffic and pos-
sibly longer round-trip times as seen by the clients.
Investigating the exact effects of this parameter was
not considered important at this time.
Superlinear and Bandwidth Friendly Geo-replication for Store-and-forward Systems
333

All configurations were tested for 35 seconds.
First, there was a transient phase of 5 seconds, allow-
ing the CPU caches and TCP parameters to stabilize.
Next, the code continued to run in the steady-state
phase for another 30 seconds.
3.2.3 Dependent/response Variables
For all configurations, i.e. the combinations of one
particular value for each of the independent variables,
the response variable of most interest to us in this
experiment was the total system throughput. This
throughput was defined as the number of messages
processed per second, according to the sequence of
tasks described in Section 3.1. We also measured the
minimum RTT between each pair of nodes.
3.2.4 Ignored Response Variables
Other response variables that might be of interest
mainly concern the behaviour when a failed server is
detected, and the time-span afterwards during which
the system is reassigning messages to new servers.
Just as in the evaluation of MDC-Cast (Nehme et al.,
2018), another replication protocol for geo-separated
environments, we focus on the performance of the
failure-free case.
3.3 Procedure
Before each test, all servers were reset to a known
empty starting state. The files for local storage were
removed, so they could be recreated without con-
tent. The application was then started on all servers,
with the selected values for the independent variables
given to it as command line parameters.
The test application counted the number of mes-
sages processed each second by each server, values
that were then summarized into a result for the full
system. The median of the values for each of the 30
seconds in the steady-state phase was then calculated.
3.4 Execution
We used a total of thirteen servers during January
2020, all of them being the smallest ones offered by
DigitalOcean
5
at that time: 1 GB memory, 25 GB
disk, and 1 virtual x64 CPU. They all ran CentOS 7.5,
with the working directory on the filesystem XFS.
The code was compiled using gcc 4.8.5.
5
http://digitalocean.com
4 RESULTS
Here we present a summary of the results. The full
list of measurements for all tested configurations is
available together with the source code.
We got distinct results for three cases: a single
server, a cluster in a local network, and a cluster in
a geo-separated network. For a single server, which
effectively just means the key-value store LevelDB,
we got a peak throughput of 87 588 MPS.
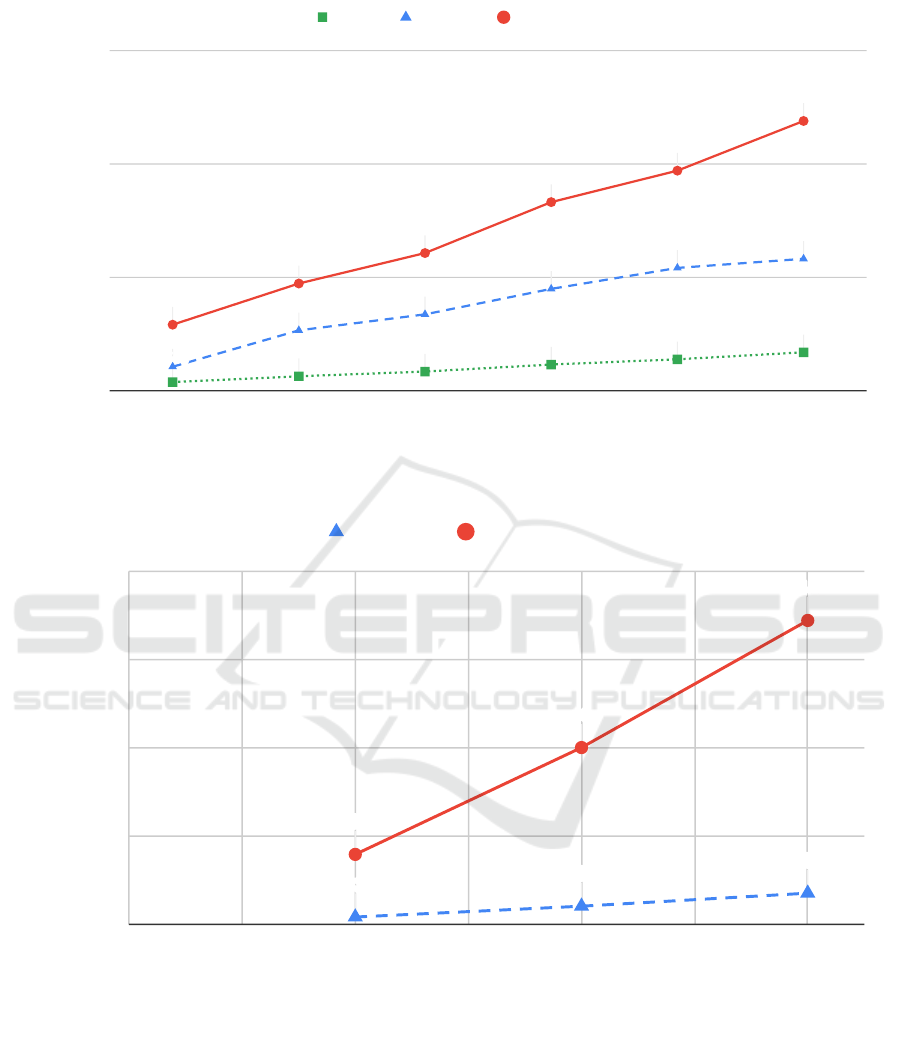
In a local network, the total system throughput in-
creased with the number of nodes up to 47 572MPS
on 7 nodes, shown in Figure 7. The minimum RTT
varied between 143 µs and 420 µs.
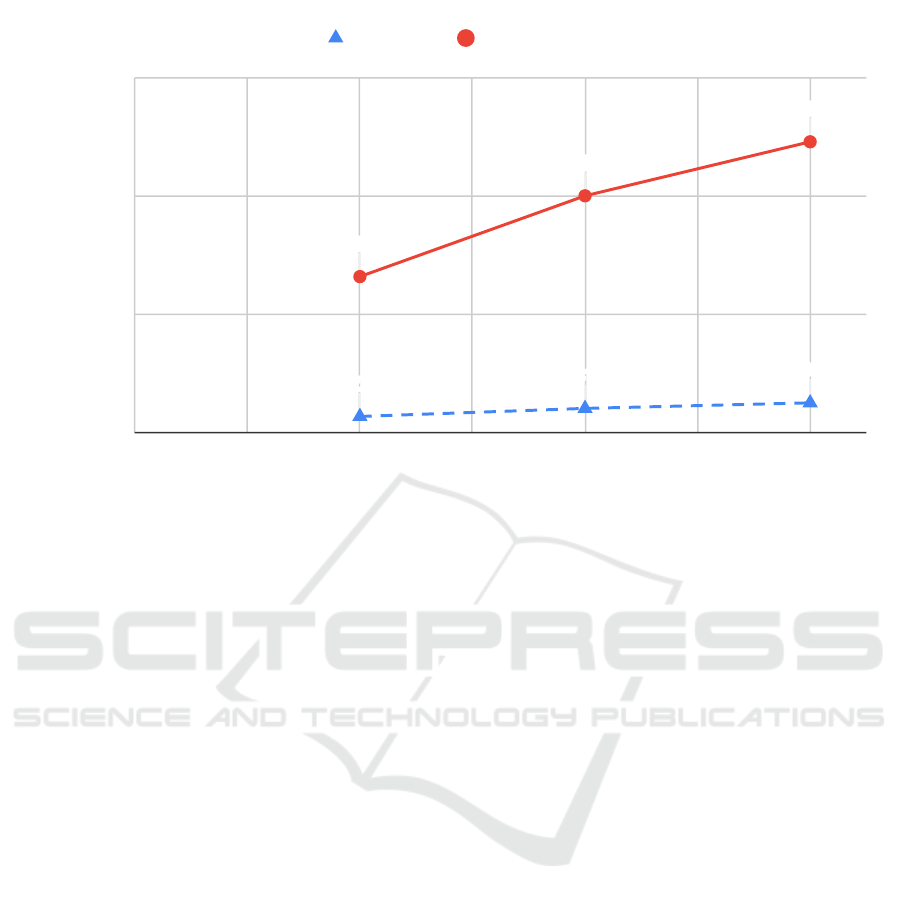
When GeoRep was deployed in a cluster with
servers in separate time-zones, throughput again in-
creased with the number of nodes. The peak through-
put levels were obviously lower than in the local case
due to the longer round-trip times. Figure 8 shows
how the throughput reached 793 MPS for 3 nodes and
3449MPS for 7 nodes. The throughput also increased
almost perfectly with the number of clients, which we
can see as on 7 nodes 10 clients reached 353MPS, and
100 clients reached, as mentioned, 3449MPS.
For 3 geo-separated nodes, the minimum RTT av-
eraged 174 ms. For 7 nodes, some pairs of nodes
ended up relatively close to each other (e.g. New
York and Toronto in North America, and Amsterdam,
Frankfurt, and London in Europe), resulting in the av-
erage minimum RTT decreasing to 108ms. Figure 9
shows the RTT between a few selected pairs of nodes.
The profiles for nodes geographically close to each
other are notably similar.
5 DISCUSSION
GeoRep was able to leverage the ordering indepen-
dence and performed better as the number of clients,
and thereby also the number of parallel requests, in-
creased.
With a larger number of nodes, n, the average
distance between each pair of nodes in the geo-
distributed case and thereby their pair-wise round-trip
times, decreased. The system as a whole thus became
superlinear, providing throughput which increased
faster than the number of nodes, from 264 MPS per
node for 3 nodes, to 493 MPS per node for 7 nodes, as
shown in Figure 10.
With more powerful servers it may be possible
to support a larger number of clients, getting an
even higher system throughput. We also expect the
throughput to increase further by using a larger num-
ber of nodes than 7.
ICSOFT 2020 - 15th International Conference on Software Technologies
334
1542
2574
3405
4640
5564
6795
4253
10666
13484
17977
21671
23278
11664
18925
24292
33270
38816
47572
number of servers
kMPS
0
20
40
60
2 3 4 5 6 7
1 client 10 clients 100 clients
Figure 7: System throughput as a function of the number of servers, all running in the same data center.
82
205
353
793
2006
3449
number of servers
kMPS
0
1
2
3
4
1 2 3 4 5 6 7
10 clients 100 clients
Figure 8: System throughput as a function of the number of servers, running in different data centers on multiple continents.
Next, we will discuss the various types of identi-
fied validity threats.
5.1 Threats to Validity
The identified validity threats are grouped (Cook and
Campbell, 1979; Jedlitschka et al., 2008) for better
overview.
5.1.1 Internal
Internal validity threats concern the causal relation-
ship between two variables. Even though an exist-
ing SMS gateway was the driving force for the re-
quirements addressed by GeoRep, a new and minimal
application was written for these experiments. This
avoided the threat of any confounding variables intro-
Superlinear and Bandwidth Friendly Geo-replication for Store-and-forward Systems
335
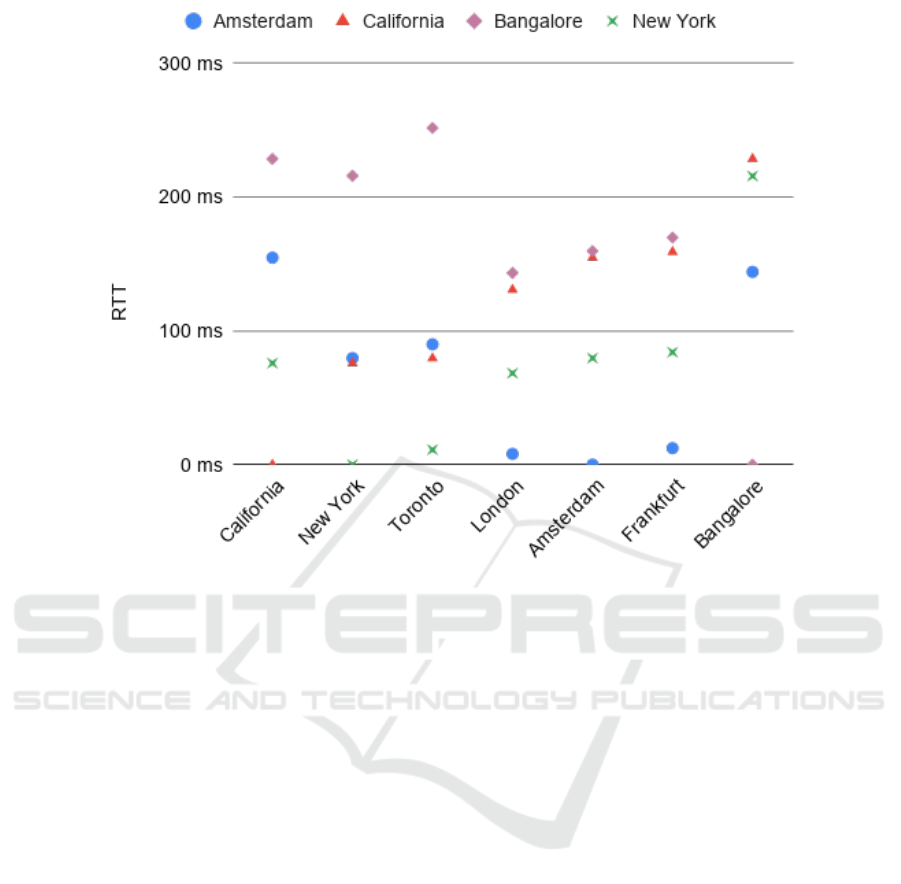
Figure 9: Round-trip time (RTT) for various pairs of servers.
duced by the gateway implementation and simplified
the reproducibility.
To address the threat of additional confounding
factors, all cases were run for a relatively long time.
As we focused on the median, any temporary vari-
ances in the environment were effectively filtered out.
5.1.2 External
External validity threats concern whether the results
are still valid in a more general context. Due to not
having a coordinating server, our proposal is only us-
able for situations where the stored elements have no
relative order.
6 RELATED WORK
Other store-and-forward systems are application-to-
application queues, e.g. Apache Kafka (Kreps et al.,
2011). In Apache Kafka the data in the system can be
spread over multiple subsets of the nodes, with each
such subset being called a partition. A partition has
an elected leader, which handles all reads and writes,
and zero or more replicas which are kept in sync us-
ing a very efficient mechanism. Should the leader be-
come unavailable, one of the replicas takes its place.
This gives an automatic ordering of the events, but at
the cost of being sensitive to the network latency be-
tween the client and the replica leader. GeoRep avoids
this cost, as it has no leader. Instead, clients are free
to connect to any node of their choice, thereby min-
imizing the latency time and as a result maybe also
maximizing the throughput.
For systems where a global ordering must be
maintained, the replication protocols are often based
on a variant of Paxos (Lamport, 1998) or Raft (On-
garo and Ousterhout, 2014). The Paxos variant Men-
cius (Mao et al., 2008) was designed to perform well
even in wide-area networks with high inter-node la-
tency. One of the ways they achieve this is to use
a multi-master setup, where the leadership is divided
among all nodes similarly to GeoRep. However, as all
data is sent to all other nodes, the throughput does not
increase when nodes are added to the system.
Many of the data replication protocols are also
based on total order broadcast (D
´
efago et al., 2004),
which also requires all data to be processed by all
nodes in the same order. This makes the situation
easier for the upper layers of the protocol, but can
never lower the bandwidth requirements. When the
data payload is big enough to make the system net-
work bound, throughput therefore instead notably
decreases. GeoRep could in this situation instead
ICSOFT 2020 - 15th International Conference on Software Technologies
336
27
41
50
264
401
493
number of servers
MPS
0
200
400
600
1 2 3 4 5 6 7
10 clients 100 clients
Figure 10: Throughput per node in the geo-distributed case.
provide a system throughput which increased faster
than n, as shown in Figure 8 and Figure 10. To the
best of our knowledge, the only other replication sys-
tem achieving this is PaRiS (Spirovska et al., 2019).
7 CONCLUSIONS AND FUTURE
WORK
To provide data safety against internet and power
outages for store-and-forward systems, we created
a new replication protocol. Particular consideration
was given to the requirements for SMS traffic, e.g.,
having to work well in a geo-distributed configura-
tion and a lack of global order. In a controlled experi-
ment, the protocol was shown to scale well both with
the number of nodes in the system and the number
of parallel message producers. The highest recorded
throughput for the geo-distributed case was close to
3500MPS, but higher values ought to be possible us-
ing a larger number of more powerful machines. The
source code used in the experiment is open sourced to
enable replication studies.
For future work, we recall Figure 9 showing
the round-trip times between some selected pairs of
nodes. Instead of replicating messages to a random
selection of nodes, we can select the f ones with the
smallest RTT from where the message was received,
ignoring nodes with an RTT lower than 10ms. This
minimum value ensures messages are always repli-
cated outside of the critical region mentioned in the
Introduction section.
ACKNOWLEDGEMENTS
This work was sponsored by The Knowledge Founda-
tion industrial PhD school ITS ESS-H, H2020 project
ADEPTNESS (871319) and Infoflex Connect AB.
REFERENCES
Aceto, G., Botta, A., Marchetta, P., Persico, V., and
Pescap
´
e, A. (2018). A comprehensive survey on in-
ternet outages. Journal of Network and Computer Ap-
plications, 113(2018):36–63.
Ahamad, M. and Ammar, M. (1989). Performance Char-
acterization of Quorum-Consensus Algorithms for
Replicated Data. IEEE Transactions on Software En-
gineering, 15(4):492–496.
Brewer, E. A. (2000). Towards Robust Distributed Systems.
In Principles Of Distributed Computing. ACM.
Cetinkaya, E. K. and Sterbenz, J. P. (2013). A taxonomy
of network challenges. In International Conference
on the Design of Reliable Communication Networks,
DRCN.
Cook, T. D. and Campbell, D. T. (1979). Quasi-
experimentation: Design and analysis for field set-
tings, volume 3. Rand McNally, Chicago.
Superlinear and Bandwidth Friendly Geo-replication for Store-and-forward Systems
337

Cooper, B. F., Silberstein, A., Tam, E., Ramakrishnan, R.,
and Sears, R. (2010). Benchmarking cloud serving
systems with YCSB. In Proceedings of the ACM sym-
posium on Cloud computing, SoCC ’10, New York,
NY, USA. ACM.
D
´
efago, X., Schiper, A., and Urb
´
an, P. (2004). Total order
broadcast and multicast algorithms. ACM Computing
Surveys, 36(4):372–421.
Eugster, P. T., Felber, P. A., Guerraoui, R., and Kermarrec,
A.-M. (2003). The many faces of publish/subscribe.
ACM Computing Surveys, 35(2):114–131.
Gilbert, S. and Lynch, N. A. (2004). Brewer’s Conjecture
and the Feasibility of Consistent, Available, Partition-
Tolerant Web Services. In Principles Of Distributed
Computing, PODC.
Jedlitschka, A., Ciolkowski, M., and Pfahl, D. (2008). Re-
porting experiments in software engineering. In Guide
to advanced empirical software engineering, pages
201–228. Springer.
Kreps, J., Narkhede, N., and Rao, J. (2011). Kafka: a Dis-
tributed Messaging System for Log Processing. In
Proceedings of the SIGMOD Workshop on Network-
ing Meets Databases, NetDB, Athens, Greece.
Kumar, A. (1991). Hierarchical Quorum Consensus: A
New Algorithm for Managing Replicated Data. IEEE
Transactions on Computers, 40(9):996–1004.
Lamport, L. (1998). The part-time parliament. ACM Trans-
actions on Computer Systems, 16(2):133–169.
Lamport, L., Shostak, R., and Pease, M. (1982). The
byzantine generals problem. ACM Transactions on
Programming Languages and Systems (TOPLAS),
4(3):382–401.
Maekawa, M. (1985). A
√
N Algorithm for Mutual Exclu-
sion in Decentralized Systems. ACM Transactions on
Computer Systems, 3(2):145–159.
Mao, Y., Junqueira, F. P., and Marzullo, K. (2008). Men-
cius: Building Efficient Replicated State Machines for
WANs. In USENIX Conference on Operating Sys-
tems Design and Implementation, OSDI, Berkeley,
CA, USA.
Nehme, M.-J., Palix, N., Beydoun, K., and Quema, V.
(2018). MDC-Cast: A Total-Order Broadcast Protocol
for Multi-Datacenter Environments. In IEEE Sympo-
sium on Reliable Distributed Systems, SRDS. IEEE.
Ongaro, D. and Ousterhout, J. K. (2014). In Search of
an Understandable Consensus Algorithm. In USENIX
Annual Technical Conference.
Percacci, R. and Vespignani, A. (2003). Scale-free behav-
ior of the internet global performance. The European
Physical Journal B, 32(4):411–414.
Ricart, G. and Agrawala, A. K. (1981). An Algorithm for
Mutual Exclusion in Computer Networks. Communi-
cations of the ACM, 24(1):9–17.
Robson, C. and McCartan, K. (2016). Real world research.
John Wiley & Sons.
Shapiro, M., Preguic¸a, N., Baquero, C., and Zawirski, M.
(2011). A comprehensive study of Convergent and
Commutative Replicated Data Types. Technical Re-
port RR-7506, Inria – Centre Paris-Rocquencourt.
Spirovska, K., Didona, D., and Zwaenepoel, W. (2019).
PaRiS: Causally Consistent Transactions with Non-
blocking Reads and Partial Replication. In IEEE Inter-
national Conference on Distributed Computing Sys-
tems, ICDCS. IEEE.
Thomas, R. H. (1979). A majority consensus approach
to concurrency control for multiple copy databases.
ACM Transactions on Database Systems (TODS),
4(2):180–209.
Wohlin, C., Runeson, P., H
¨
ost, M., Ohlsson, M. C., Reg-
nell, B., and Wessl
´
en, A. (2012). Experimentation in
software engineering. Springer Science & Business
Media.
Yousif, M. (2018). Cloud Computing Reliability—Failure
is an Option. IEEE Cloud Computing, 5(3):4–5.
ICSOFT 2020 - 15th International Conference on Software Technologies
338
