
A Holistic Approach for the Development of a Digital Twin Focused
on Commissioning and Control of Electromechanical Feed Axes
Manuel Norberger
1
, René Apitzsch
1
, André Sewohl
1
, Holger Schlegel
1
and Matthias Putz
1,2
1
Institute for Machine Tools and Production Processes, Chemnitz University of Technology, Reichenhainer Straße 70,
09126 Chemnitz, Germany
2
Fraunhofer-Institut forMachine Tools and Forming Technologies, Reichenhainer Straße 70, 09126 Chemnitz, Germany
Keywords: Industry 4.0, Automation Technologies, Virtual Commissioning, Digital Twin, Machine Tool, Drive Data.
Abstract: The conventional commissioning of a machine offers numerous starting points for the use of modern
methods and technologies. With virtual commissioning, the conventional sequential work tasks can be
parallelized, which represents an economic advantage. For the virtual commissioning of machines and
systems, an appropriate knowledge of automation technology and processes is necessary. This information
can be found in the abstracted image, the digital twin. The digital twin is an application-dependent complex
entity. Drive control is part of such an application. In the industrial environment, parameterization is usually
carried out once on the basis of empirical methods during commissioning. Knowledge and methods from
science and research for optimal adjustment are rarely used. In this publication a holistic approach to the
implementation of the digital twin including automation technology of a system with an electromechanical
feed axis as well as an approach for recording the information necessary for parameterizing the drive control
is shown. The focus is on the ability of the digital twin to process information about the dynamics of the
drive system.
1 INTRODUCTION
With the advancement of Industry 4.0 data-driven
innovations come to the fore. Within the scope of
the product lifecycle a detailed digital twin can open
new opportunities and therefore can bring many
advantages.
Referring to (Grieves and Vickers, 2016) the
origins of the digital twin date back to the year 2002
where it was described as a "Conceptual Ideal for
PLM". This concept already had all the features of
the digital twin as we know it today. There was the
real space, the virtual spaces and the bi-directional
links in-between showing the flow of information
throughout the whole product lifecycle. Over the
years the concept was expanded and the definition
was sharpened and in 2010 it was called "Digital
Twin" for the first time (Grieves, 2011). In the same
year, NASA defined the digital twin as "integrated
multi-physics, multi-scale, probabilistic simulation
of a vehicle or system that uses the best available
physical models, sensor updates, fleet history, etc.,
to mirror the life of its flying twin" (Shafto et al.,
2010). In 2011 this concept already plays a huge role
in the context of Industry 4.0 (Roth, 2016).
The approach in this paper is based on the
definition of the Digital Twin in (Grieves and
Vickers, 2016) that's why it is briefly outlined
hereinafter. As shown in Figure 1, the Digital Twin
includes virtual information which describes a
potential or physical entity depending on the phase of
the lifecycle. An ideal Digital Twin would contain
every measurable information of its physical
counterpart. In the field of mechanical engineering a
Digital Twin can exist for a product, a machine (tool)
or an entire factory. In the scope of this work we are
referring to a Digital Twin for a machine tool.
Regarding the potential or physical entity from
above there are two types of Digital Twins: Digital
Twin Prototype (DTP) and Digital Twin Instance
(DTI). The Digital Twin Prototype (DTP) contains
all necessary information to create a potential
physical version including CAD models, control and
regulation logics etc. and is primarily used in the
development phase of the product. The Digital Twin
Instance (DTI) emerges out of the DTP and is
directly related to a specific physical entity and stays
connected throughout the whole lifecycle. This also
means the DTP and the DTI are in a parent-child
relationship.
Norberger, M., Apitzsch, R., Sewohl, A., Schlegel, H. and Putz, M.
A Holistic Approach for the Development of a Digital Twin Focused on Commissioning and Control of Electromechanical Feed Axes.
DOI: 10.5220/0009884707690774
In Proceedings of the 17th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2020), pages 769-774
ISBN: 978-989-758-442-8
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
769
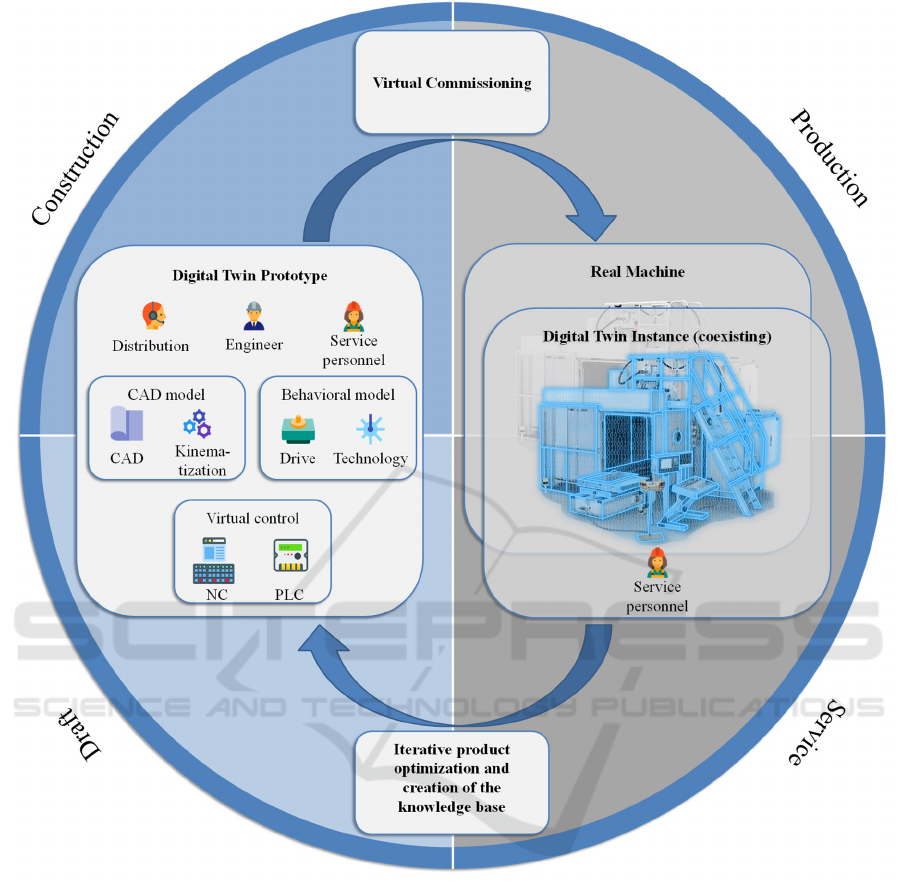
Figure 1: Influence of the digital twin for the product life cycle.
Throughout the lifecycle, many different user
groups interact with the machine tool and therefore
with its Digital Twin. They add as well as extract
information for a specific purpose, e.g. faulty parts
for maintenance, CAD models for assembly
simulation or requirement specification for
marketing. In (Winkler et al., 2020) it is described
which role the user and his or her acceptance play
during the development and usage of a Digital Twin.
It is of vital importance to know and overcome the
obstacles for the user in order to exploit the full
potential of the Digital Twin. This can be achieved
by technological and social solutions for example
through an intuitive user- or rather situation-specific
user interface and by answering to the question:
"What is the benefit for the user?" during the
instructions.
This paper particularly focuses on the virtual
commissioning of electromechanical feed axes of a
machine tool. Especially in the context of
commissioning tasks are performed sequentially.
Therefore, a process parallelization is proposed in
this paper as well as the usage of a consistent data
model, the Digital Twin, which offers the
opportunity to use the stored information as an input
for the parameterization of the electromechanical
feed axes.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
770
2 CONTROL OF MACHINE
TOOLS
In machine tools, the creation of a desired shape
requires a relative movement between the tool and
the workpiece. Movements are realized via feed
drives. In modern processing machines, electric feed
drives are used almost exclusively (Groß et al.,
2006). These are also known as electromechanical
axes (Hellmich, 2014). A control is necessary, so
that defined movements are observed as precisely as
possible. There are numerous strategies for
controlling machine-specific variables, such as the
position or speed of electromechanical axes,
whereby the concept of the cascade structure, also
known as servo control, has prevailed (Schröder,
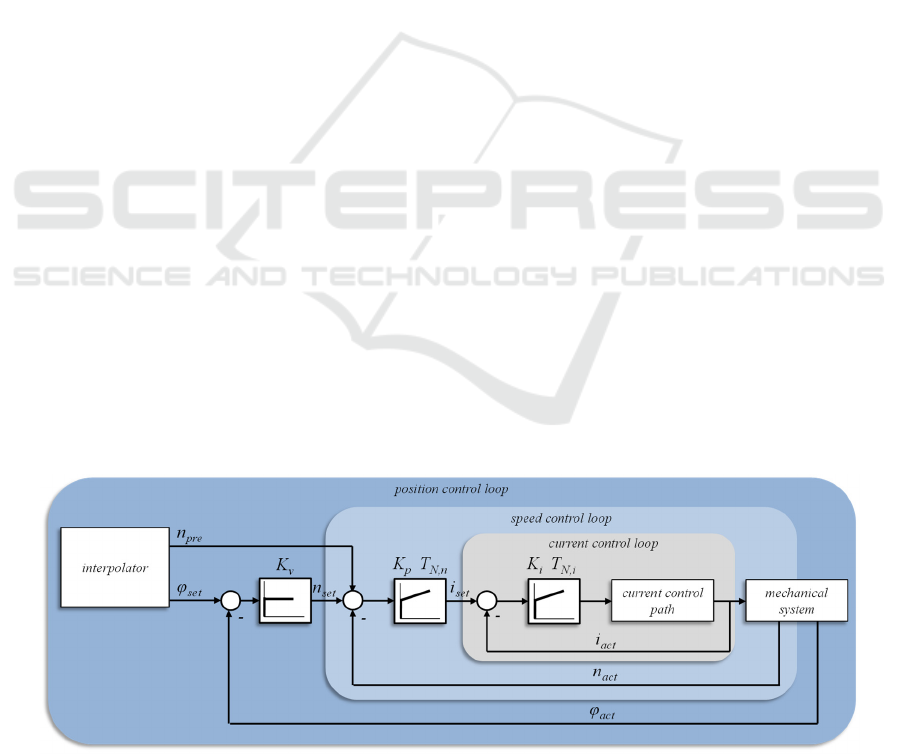
2009). The principle and the simplified structure of
the position control in a cascade structure are shown
in Figure 2. It is characteristic that the three control
loops are superimposed on one another. The current
control loop, which is part of the superimposed
speed control loop, is inside. At the very outside is
the position control loop, which is often
supplemented by a feed forward control. This can
reduce lag errors. In the industrial environment,
additional extensions are usually used, for example
filters, band-stops or additional feedback.
With the use of controlled electromechanical
drive systems, the increasing demands on machine
productivity and thus on dynamics can be met with
higher accuracy. Nevertheless, there are ongoing
efforts to improve manufacturing strategies and
processes in terms of stability, quality and
efficiency. The parameterizations of the control and
the control quality have a significant influence on
the process and the product quality. Accuracy and
productivity can be maximized by optimally
utilizing the control potential. However, studies have
shown that the control on machine tools are very
often not optimally designed (Schönherr, 2012).
Various methods are available for parameterizing
the controller. Very good results can be achieved
with a systematic design. However, this requires the
use of identification procedures, which are
associated with a significant additional expenditure
of time. For this reason, this procedure is rarely used
in industrial practice. Here, the control is usually
designed purely empirically based on the knowledge
of the commissioning engineer. At this point, the use
of the Digital Twin offers enormous potential for
improvement, especially in combination with virtual
commissioning.
3 VIRTUAL COMMISSIONING
Appropriate data and knowledge according the
handling of information are required for virtual
commissioning (VC). The real machine is built
based on the VC and the model data of the DTP. The
digital twin prototype also creates the DTI of this
specific machine. This DTI already exists during the
actual commissioning. The data obtained in this way
(e.g. frequency response, sensor data, etc.) are used
for the digital twin prototype and thus for the design
phase of the next machine. In this way, a knowledge
base for the products is created.
In addition, a large amount of data is generated
in the real operation of the producing machine. This
data enables direct or indirect conclusions to be
drawn about the machine status. Furthermore, the
coexisting DTI is used for process monitoring and
setting. For example, processing steps for new
workpieces can be virtually implemented and
optimized beforehand using the digital twin. This
leads to a minimization of the machine downtime.
Figure 2: Principle and structure of cascade control.
A Holistic Approach for the Development of a Digital Twin Focused on Commissioning and Control of Electromechanical Feed Axes
771

The VC is defined in detail in (VDI, 2016). It
describes the overall test of the automation system
without a real machine. The development stages
software in the loop (SIL) and hardware in the loop
(HIL) can also be used to describe the testing of
automation solutions.
The digital twin is intended to support the VC on
the one hand and to coexist with the real system on
the other. The new possibilities thus obtained should
be used in a value-adding manner based on (VDI,
2018). For example, business models in the area of
control and process control or via projects based on
simulation integration can be developed.
4 MECHATRONIC DESIGN
4.1 Modularity and Standardization
To improve the overall mechatronic design of a
corresponding product, the modularization of
products has become established in recent decades.
This modularization brings with it a standardization
of components. A modular design simplifies the
collaboration of knowledge carriers from different
areas over the entire product lifecycle. The overall
mechatronic system includes disciplines in
electrical, mechanical and computer science (van
Beek et al., 2010).
To improve the usability of the digital twin, a
modular approach of the machine or system under
consideration should be carried out or assumed. For
this purpose, for example, libraries can be used in
the area of CAD as well as for automation
technology. Those libraries often depend on the
specific framework. The libraries correspond to the
modules. Usually these are specific machine
components, such as devices, drive systems, gears,
etc.
If the environmental conditions resulting from
the location of the specific machine (e.g.
temperature fluctuations, vibrations, etc.) are
neglected, the modularity of the production system
enables the module-related data to be returned from
the digital twin instance to the digital twin prototype.
Different instances of a machine, information from
individual modules (e.g. drive system, gearbox, etc.)
and their effects should be almost identical and
reproducible.
4.2 Level of Detail
Every component can be modeled and every data
point can be called up, from the system through the
machine to the drive. Depending on the task,
different aspects are focused. Suitable data
management for the digital twin is discussed in
(Winkler et al., 2020). An application- and goal-
oriented selection of the data to be recorded is
therefore just as important as the definition of the
system boundaries when creating the digital twin.
The amount of data must be kept lean and the
system clearly defined.
4.3 Estimating the Dynamics of an
Electromechanical Feed Axis
In order to improve the information content of a
Digital Twin of a machine, data from the real
process and model knowledge should be embedded.
For example, moments of inertia and friction can be
determined based on knowledge of the used
geometries, materials and material pairs. In addition,
models of the electromechanical axis have to be
developed to reflect the actual behavior.
This data and real recorded frequency responses
are intended to enable the digital twin to access
information on estimated frequency responses of the
virtual machine. In addition, algorithms are available
to determine the parameters for the drive control
from this information.
The estimated frequency responses must be
validated and adjusted using real frequency
responses of the real machine. On this basis, an
improvement of the drive dynamics model is
expected. The digital twin prototype thus has the
ability to make a statement about the dynamic
properties of the drive system from CAD- and
metadata. This approach concerns the digital twin
prototype that is decoupled from the real machine.
To estimate further machine states, a module is
to be developed that coexists with the real machine
and accesses drive and sensor data. Figure 3 shows
possible software solutions for this. Using the
example of the vertical electromechanical feed axis
shown in Figure 3, data from the CAD model such
as masses and moments of inertia are transferred to
the behavior model. With the SIMIT software from
Siemens, this data can be transferred to TwinCAT
via OPC UA. The advantage of TwinCAT is the
open structure and the possibility to use Matlab
Simulink models. SIMIT offers a separate interface
to the CAD software NX and the corresponding
kinematics tool Mechatronics Concept Designer
(MCD). The tool chain of an automated machine is
completed by PLCSimAdvanced. This enables the
simulative functioning of the PLC applications. The
final step in completing the digital twin approach is
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
772
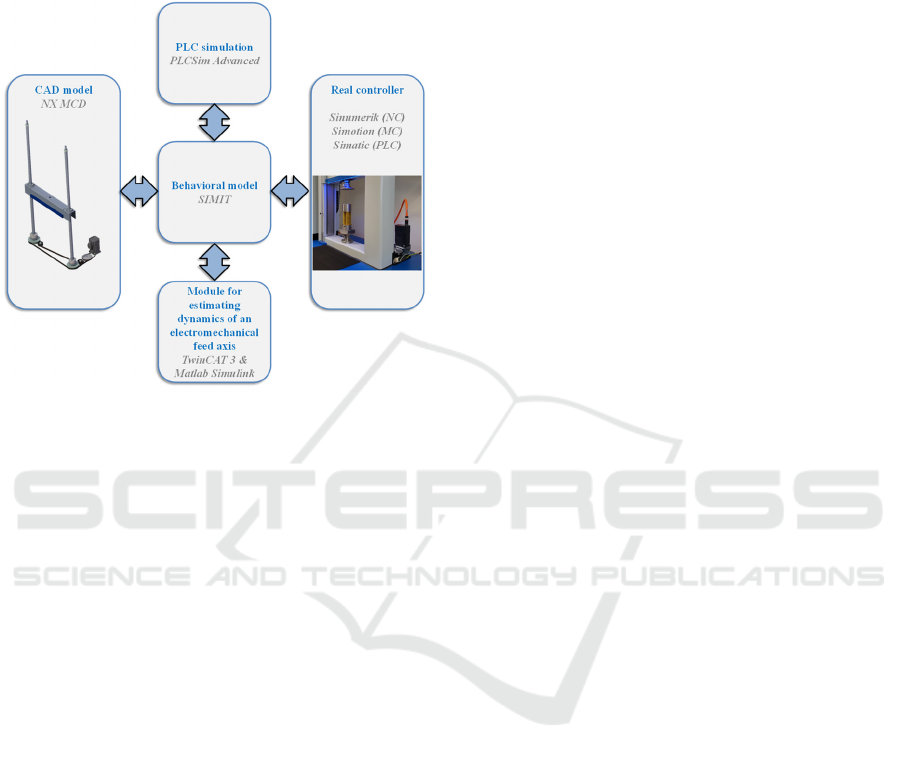
to build coexistence between the digital and physical
twin. This is also done via the SIMIT core element.
This offers corresponding interfaces to physical
controls. The approach thus includes both SIL and
HIL.
Figure 3: Exemplary structure of a testbed for an
integration of an estimation of machine conditions in the
digital twin.
The estimating module in TwinCAT receives
targeted data for example in order to make estimates
for the drive control from real drive data.
(Schöberlein, 2020) describes the disturbance
variable monitoring of speed-controlled mechatronic
drive systems by implementing corresponding
estimation algorithms. The information obtained in
this way is also fed back into the digital twin
prototype in order to make runtime information
available.
Thanks to the already mentioned modularization
of the machine, information for the virtual
commissioning of the drive can be generated
automatically. For example, libraries can be used for
the overall mechatronic design of a machine, which
feed data to algorithms and models running in the
background. When the draft is completed, they
already provide information and recommendations
for the parameterization of the drive. Knowledge
from research and science can thus be used
intuitively for technical staff and service personnel.
5 USAGE AND CONCLUSION
As part of the development of production plants, the
implementation of a holistic approach across the
entire product life cycle (as shown in Figure 2)
offers enormous potential for improvement and
savings. The focus is essentially on the
electromechanical feed drives. The use of the digital
twin is of great benefit for all areas of the product
life cycle.
As already described in the previous chapter,
important information can be stored and linked to
one another in the design phase of the machine. In
this way, effects on the drive control can be assessed
at an early stage. Constructive adjustments can be
made retrospectively, for example to influence
resonance frequencies. In this way, an overall
mechatronic design can be implemented.
The digital twin is of particular interest for the
commissioning phase. As part of virtual
commissioning, complex identification procedures
can already be used and automated. In this way, all
the information required for commissioning can be
stored and made available in advance. This
drastically reduces the effort during commissioning.
In addition, the non-reproducible empirical
procedure is substituted by scientific methods. A
significant improvement in controller performance
can therefore be expected. The prerequisite for this
is of course a sufficiently precise database.
Mechanical parameters such as masses, moments of
inertia, stiffness, damping and friction values are
particularly relevant for the controller parameters.
However, communication, computing, cycle and
dead times that result from the control components
must also be included.
These parameters are of interest for ongoing
operation even after commissioning. A change in the
mechanical system over the running time of the
machine is conventionally hardly detected. The
digital twin can be used to feedback real sensor and
drive data from the machine. These are to be made
available for disturbance variable monitoring with
appropriate estimation algorithms. This enables
permanent monitoring and automatic adjustment of
the parameterization in perspective.
In addition, the inclusion of the processing task
in the sense of forward-looking process planning
offers additional potential for improvement. If
information regarding the workpiece masses and
disruptive process forces is stored in the digital twin,
this can also be included in the controller
parameterization. This enables a design that is
optimized for different machining tasks.
Furthermore, the digital twin serves to generate a
knowledge base and iterative process and product
optimization.
A Holistic Approach for the Development of a Digital Twin Focused on Commissioning and Control of Electromechanical Feed Axes
773

In the course of future research work, the
creation of a digital twin of an electromechanical
feed axis is initially being considered. The focus is
on demonstrating the functionality of the structure
illustrated in Figure 3. Basis is the test setup shown
in Figure 3. The corresponding CAD model and the
data from control components are already available.
With the implementation of the software
infrastructure, the data can be transferred to
parametric models in Matlab Simulink via the
interfaces. These models are used to carry out
systematic identification procedures. This enables
the calculation of controller parameters and the
assessment of the controller performance, too. In
addition, this data is in turn made available for
virtual commissioning. After validation, the
successive expansion with the additional modules
for monitoring and automatic adjustment of the
parameterization during operation is planned.
ACKNOWLEDGEMENTS
Funded by the European Union (European Social
Fund) and the Free State of Saxony.
REFERENCES
van Beek, T. J., Erdent, M. S. and Tomiyama, T., 2010.
Modular design of mechatronic systems with function
modeling. In Mechatronics, 20(8), 850-863.
Grieves, M., 2011. Virtually perfect: Driving innovative
and lean products through product lifecycle
management. Space Coast Press.
Grieves, M. and Vickers, J., 2016. Transdisciplinary
Perspectives on Complex Systems - Digital Twin:
Mitigating Unpredictable, Undesirable Emergent
Behavior in Complex Systems, Springer Cham.
Groß, H., Hamann, J. and Wiegärtner, G., 2006.
Elektrische Vorschubantriebe in der
Automatisierungstechnik: Grundlagen, Berechnung,
Bemessung. Publicis Corporate Publishing Erlangen.
Hellmich, A., 2014. Nichtinvasive Identifikation von
Regelstreckenparametern für elektromechanische
Achsen: Dissertation Arvid Hellmich, In Berichte aus
dem IWU, 85.
Schröder, D., 2009. Elektrische Antriebe - Regelung von
Antriebssystemen. Springer-Verlag Berlin Heidelberg,
4
th
edition.
Schönherr, R., 2012. Regelkreisüberwachung
mechatronischer Antriebssysteme: Dissertation Ruben
Schönherr, In Berichte aus dem IWU, 64.
Schöberlein, C., Norberger, M., Schlegel, H. and Putz, M.,
2020. Simulation and disturbance estimation of speed-
controlled mechatronic drive systems. In MATEC Web
of Conferences, 306.
Shafto, M., Conroy, M., Doyle, R., Glaessgen, E., Kemp,
C., LeMoigne, J. and Wang, L., 2010. Draft modeling,
simulation, information technology & processing
roadmap. In Technology Area, 11.
Roth, A., 2016. Einführung und Umsetzung von Industrie
4.0. Springer-Verlag Berlin Heidelberg.
VDI-Richtlinie 3693 Blatt 1, 2016. Virtual commissioning
- Model types and glossary.
VDI-Richtlinie 3693 Blatt 2, 2018. Virtual commissioning
- Introduction of virtual commissioning in companies.
Winkler, S., Schumann, M., Apitzsch, R., Klimant, F. and
Klimant, Ph., 2020. Der Digitale Zwilling – Probleme
und Lösungsansätze. In ZWF, 115.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
774
