
Accelerating Matrix Factorization by Overparameterization
Pu Chen and Hung-Hsuan Chen
Computer Science and Information Engineering, National Central University, Taoyuan, Taiwan
Keywords:
Matrix Factorization, Collaborative Filtering, SVD, Recommender Systems, Overparameterization.
Abstract:
This paper studies overparameterization on the matrix factorization (MF) model. We confirm that overpa-
rameterization can significantly accelerate the optimization of MF with no change in the expressiveness of
the learning model. Consequently, modern applications on recommendations based on MF or its variants can
largely benefit from our discovery. Specifically, we theoretically derive that applying the vanilla stochastic
gradient descent (SGD) on the overparameterized MF model is equivalent to employing gradient descent with
momentum and adaptive learning rate on the standard MF model. We empirically compare the overparame-
terized MF model with the standard MF model based on various optimizers, including vanilla SGD, AdaGrad,
Adadelta, RMSprop, and Adam, using several public datasets. The experimental results comply with our
analysis – overparameterization converges faster. The overparameterization technique can be applied to var-
ious learning-based recommendation models, including deep learning-based recommendation models, e.g.,
SVD++, nonnegative matrix factorization (NMF), factorization machine (FM), NeuralCF, Wide&Deep, and
DeepFM. Therefore, we suggest utilizing the overparameterization technique to accelerate the training speed
for the learning-based recommendation models whenever possible, especially when the size of the training
dataset is large.
1 INTRODUCTION
This paper studies overparameterization on matrix
factorization (MF), which is arguably a fundamen-
tal technique in recommender systems. Overparame-
terization refers to the scenario that introduces extra
learnable parameters to a model without increasing
the expressiveness (i.e., the hypothesis space) of the
model. Adding redundant parameters may seem to be
a waste of computational power and space. However,
this paper shows a counterintuitive result both theo-
retically and empirically – we can accelerate the op-
timization process of an MF model via overparame-
terization. Essentially, optimizing the overparameter-
ized MF model by SGD is equivalent to introducing
momentum and an adaptive learning rate on the orig-
inal MF model, and this is probably the root cause
of the acceleration. Since MF and its variants, es-
pecially those based on deep learning models, such
as Wide&Deep (Cheng et al., 2016), NeuralCF (He
et al., 2017), and DeepFM (Guo et al., 2017), are fun-
damental technologies of today’s recommender sys-
tems, this discovery can be applied to a wide range of
applications and scenarios.
Overparameterization may sound like overfitting,
OP_SGD
SGD
OP_Adagrad
Adagrad
OP_Adadelta
Adadelta
OP_Adam
Adam
OP_RMSprop
RMSprop
0.4
0.6
0.8
1.0
1.0 1.1 1.2 1.3 1.4
Relative training time per epoch (smaller is faster)
Relative MSE after 50 epochs
(smaller is more accurate)
Figure 1: The relative training time and the mean squared
error (MSE) scores of different optimization methods on the
original MF model and the overparameterized MF model,
based on the average of experimental results on several pub-
lic datasets.
and indeed previous papers sometimes use the two
terms interchangeably (Whittaker et al., 2010). How-
ever, in this paper, we treat the two terms differ-
ently. Specifically, the overparameterized MF model,
albeit with more (redundant) parameters, has the same
chance to overfit or underfit the training data (com-
Chen, P. and Chen, H.
Accelerating Matrix Factorization by Overparameterization.
DOI: 10.5220/0009885600890097
In Proceedings of the 1st International Conference on Deep Learning Theory and Applications (DeLTA 2020), pages 89-97
ISBN: 978-989-758-441-1
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
89

pared to the original MF model) because the overpa-
rameterized MF model has identical hypothesis space
to the original MF model. Therefore, the improve-
ment in the experiments comes from better optimiza-
tion, not the overfitting or underfitting issues resulting
from different hypothesis spaces of the MF and the
overparameterized MF models.
Figure 1 summarizes our experimental results. We
compared various optimization techniques in terms
of their training time (measured by training time per
epoch) and loss (measured via mean squared error
score between the predicted and the actual ratings)
on the original and the overparameterized MF model.
We use the notation OP <X> to denote applying opti-
mizer <X> on the overparameterized MF model, and
<X> to denote applying optimizer <X> on the origi-
nal MF model. As seen, when we fix the optimizer,
the overparameterized model converges much faster,
with a slightly increased training time in each epoch.
Note that all the reported values here are normalized
by using SGD as the baseline. For example, OP
SGD
is located at (1.02,0.63), meaning its mean squared
error (MSE) score is 0.63 times SGD’s MSE score
(i.e., much more accurate), and its training time is
1.02 times SGD’s training time (i.e., slightly slower).
The numbers reported here are the average of multi-
ple runs on multiple datasets. The details of the exper-
imental settings and results are discussed in Section 4.
This paper makes the following contributions.
1. We propose an overparameterized matrix factor-
ization model, which intentionally introduces re-
dundant parameters to the original matrix factor-
ization model. The new model has an identical
hypothesis space to the original model.
2. We derive theoretically that applying the vanilla
SGD on the overparameterized MF model is
equivalent to optimizing the original MF model
based on SGD with momentum and adaptive
learning rates, and each learnable parameter has a
different learning rate. It is surprising that over-
parameterization implicitly operates these care-
fully designed strategies aiming at accelerat-
ing optimization, especially for deep neural net-
works (Sutskever et al., 2013; Behera et al., 2006;
Duchi et al., 2011).
3. We apply different optimizers on the overparame-
terized matrix factorization model and the original
matrix factorization model. We conducted exper-
iments based on public datasets. The experimen-
tal results show that the overparameterized model
converges to a small loss with fewer epochs in all
our experiments.
The rest of the paper is organized as follows. In
Section 2, we review the related works regarding ma-
trix factorization, optimization, overfitting and under-
fitting, and overparameterization. Section 3 intro-
duces the proposed overparameterized matrix factor-
ization model and derives its connections to the opti-
mization strategy. Section 4 shows the experiments.
Finally, we discuss the discoveries in Section 5.
2 RELATED WORK
Matrix factorization is arguably one of the most fun-
damental techniques in recommender systems. Ma-
trix factorization became popular probably because of
the Netflix Prize and Simon Funk (Piatetsky, 2007),
and therefore sometimes it is called Simon Funk’s
SVD (Kurucz et al., 2007). Essentially, MF treats
each user and each item as a vector, and a user’s
rating on an item is predicted by the inner product
of the two vectors. MF highly influences the rec-
ommendation community and many of the follow-
ing works, such as factorization machines (Rendle,
2010), SVD++ (Koren et al., 2009), nonnegative ma-
trix factorization (Luo et al., 2014), NeuralCF (He
et al., 2017), Wide & Deep model (Cheng et al.,
2016), Prod2Vec (Grbovic et al., 2015), and Behav-
ior2Vec (Chen, 2018). Instead of proposing another
learning-based recommender system that takes user
and item interaction as the input, this paper focuses
on a more fundamental issue – better optimizing the
MF model and, more generally, the learning-based
recommendation model based on overparameteriza-
tion. Therefore, the discoveries in this paper may help
many of the learning-based recommendation models
to obtain better parameters in fewer epochs.
One popular method for evaluating machine learn-
ing algorithms is to divide the labeled instances into
training and test data, and the evaluation is conducted
based on the test data. Many papers discussing rec-
ommender systems also adopt such a method. How-
ever, it has been shown that such a simple method
may obtain biased training and test instances when
evaluating recommender systems (Chen et al., 2017).
For the evaluation metrics, one common method is
to use the root mean squared score (RMSE) to com-
pare the predicted and the observed rating (Piatet-
sky, 2007; Chen, 2017; Harper and Konstan, 2016).
However, it has been found that a low RMSE score
does not necessarily represent a good recommenda-
tion ranking (Steck, 2013). Therefore, ranking-based
evaluation metrics, such as the discounted cumula-
tive gain (DCG) and normalized discounted cumula-
tive gain (nDCG), are probably better evaluation met-
rics (J
¨
arvelin and Kek
¨
al
¨
ainen, 2002). Despite the is-
DeLTA 2020 - 1st International Conference on Deep Learning Theory and Applications
90

sues of biased training and test data and RMSE metric
in recommender systems, this paper still uses these
settings, because our goal is to accelerate the op-
timization process of the existing approaches rather
than proposing another recommendation algorithm.
A supervised model learns the parameters to min-
imize the objective function, which is often defined
as a weighted sum of the training loss and the gener-
alization terms. If only the training loss is included
in the objective function, it is likely to overfit the
training data. Overfitting typically occurs when a
learning model is too complex to overinterpret the
relationship between the features and the target vari-
able. An overcomplex model has a larger hypothesis
space, so the model tends to “memorize” the train-
ing data, including the outliers, instead of discovering
the patterns from the data. As a result, an overfit-
ted model usually performs excellently on the training
data but unsatisfactory on the unseen data. To prevent
overfitting, not only the training loss but also model
generalization needs to be considered, which can be
achieved through various techniques, such as limit-
ing the L1-norm or the L2-norm of the learnable pa-
rameters (Tibshirani, 1996), dropout (Srivastava et al.,
2014), early stopping (Prechelt, 1998), and data aug-
mentation (Wong et al., 2016). However, if a model
is too simple such that it fails to capture the relation-
ship between the features and the target variables, the
model may have poor performance as well. This is
often called underfitting. Recently, it was found that
for recommender systems, the regularization weights
should be applied “itemwise”. Specifically, it is better
to assign smaller regularization weights (i.e., lower
constraints) to the latent factors associated with the
frequent items (i.e., the items that reveal more infor-
mation in the training data) (Chen and Chen, 2019).
One essential building block of the supervised
learning models is the optimizer, i.e., the optimiza-
tion algorithm. The simplest optimizer is proba-
bly stochastic gradient descent (SGD), which itera-
tively updates the values of the parameters based on
the opposite direction of the gradients. To acceler-
ate the optimization speed, especially for deep neu-
ral networks, many variations of SGD have been pro-
posed. For example, momentum is included to con-
sider not only the current gradient but also previ-
ous update speeds (Qian, 1999). The adaptive sub-
gradient method (i.e., AdaGrad) adapts the learning
rate of the parameters based on the appearance fre-
quency of the parameters – the frequent parameters
with smaller learning rates and the infrequent param-
eters with larger learning rates (Duchi et al., 2011).
Adadelta further modifies AdaGrad by including only
a limited number of previous gradients (Zeiler, 2012).
RMSprop is another method that updates each param-
eter with adaptive learning rates to reduce the oscilla-
tion across the slopes of different dimensions (Graves,
2013). Adam integrates past gradients (with exponen-
tial decay) and squares of past gradients (with expo-
nential decay) (Kingma and Ba, 2014). These op-
timizers accelerate the training speed, especially for
deep neural networks. We compared many of these
optimizers on the original and the overparameterized
MF in this paper.
It is commonly believed that a model with too
many learnable parameters tends to overfit the train-
ing data, so the success of deep learning probably
originates in the rich expressiveness of the model and
a large quantity of available training data. However,
recent studies found that increasing parameters may
not only increase the expressiveness of the model but
also accelerate the optimization under certain condi-
tions (Arora et al., 2018; Du et al., 2019). Our pa-
per studies the effect of overparameterization on the
matrix factorization problem without increasing the
hypothesis space. We also found that overparam-
eterization accelerates the optimization for the MF
method. The closest work to our study is proba-
bly the weighted-SVD (WSVD) model (Chen, 2017),
which also overparameterizes the matrix factorization
model. However, the WSVD model was derived from
a different perspective and did not provide a formal
analysis of overparameterization and its connection to
optimizers and optimization speed.
3 METHODOLOGY
3.1 Preliminary
The matrix factorization model states that r
i j
, a user
i’s rating score on item j, is influenced by the interac-
tion of user i’s latent factor vector p
i
and the item’s la-
tent factor vector q
j
. The biased matrix factorization
model, also known as the Simon Funk SVD model,
incorporates the concept of latent factors along with
user biases and item biases. As a result, the biased
matrix factorization model predicts a user i’s rating
score ˆr
i j
on an item j based on Equation 1. In the fol-
lowing, we use matrix factorization to denote biased
matrix factorization.
ˆr
i j
= µ + b
i
+ c
j
+ p
i
· q
j
, (1)
where µ is the average of all known ratings, b
i
is the
bias of user i, i.e., user i tends to overrate or underrate
an item (compared to the average), c
j
is the bias of
item j, i.e., item j tends to receive a lower or higher
Accelerating Matrix Factorization by Overparameterization
91

score (compared to the average), and p
i
and q
j
are
the vectors of the latent factors of user i and item j,
respectively.
The loss function is usually defined as the
weighted sum of two terms – (1) the sum of squared
score between the known ratings and the predicted
ratings and (2) the L2-norm of the learned parame-
ters. Equation 2 shows the loss function.
L =
1
2
∑
∀(i, j)∈κ
(ˆr
i j
− r
i j
)
2
+
λ
2
k
Θ
k
2
2
, (2)
where κ is the set of all given ratings from user i to
item j, λ is a hyperparameter to decide the relative
importance between the training loss and regulariza-
tion power, and Θ is the set of all the parameters to
learn, i.e., all the b
i
s, c
j
s, and all the entries in p
i
s and
q
j
s.
The learning process finds the parameters to mini-
mize the objective function (Equation 2). Various op-
timizers can be used in practice.
3.2 Overparameterized MF
Here we propose an overparameterized matrix factor-
ization model, which has the same hypothesis space
as the MF model shown in Equation 1. However,
we demonstrate later that our new model converges
faster than the original MF model, both theoretically
and empirically.
The predicting equation of the overparameterized
MF is shown in Equation 3.
ˆr
i j
= µ + b
i
+ c
j
+ (w
1
˜p
i
) · (w
2
˜q
j
), (3)
where w
1
and w
2
are vectors whose lengths equal the
length of ˜p
i
and the length of ˜q
j
, and represents the
Hadamard product (i.e., elementwise product).
Equation 3 is an overparameterized version of the
original matrix factorization model (Equation 1). In
other words, although the new model appears to have
extra learnable parameters w
1
and w
2
, the hypothe-
sis spaces of the original MF model and the overpa-
rameterized MF model are identical. Specifically, for
every p
i
and q
j
in Equation 1, we can find w
1
, ˜p
i
,
w
2
, and ˜q
j
in Equation 3 such that p
i
= w
1
˜p
i
and
q
j
= w
2
˜q
j
(e.g., by setting w
1
= w
2
= [1, ...,1]
T
,
p
i
= ˜p
i
, and q
j
= ˜q
j
). Likewise, for every w
1
, ˜p
i
,
w
2
, and ˜q
j
in Equation 3, we can find the correspond-
ing p
i
and q
j
in Equation 1 by merely setting p
i
as
w
1
˜p
i
and q
j
as w
2
˜q
j
. Therefore, the hypothesis
spaces of the original MF model and of our proposed
overparameterized MF model are identical.
3.3 Overparameterization Accelerates
Matrix Factorization Training
Since the new model does not increase the expressive-
ness of the MF model, if the new model converges
faster, the improvement is likely to be the result of
better optimization. Below, we theoretically show
that optimizing the overparameterized MF model by
the vanilla SGD implicitly implies optimizing the
original MF model based on SGD with the momen-
tum and adaptive learning rate on different parame-
ters. The proof follows the discussion in (Arora et al.,
2018) for the linear regression model with `
p
loss.
Below, we use superscript (t) to denote the value
of a variable at the t
th
epoch. Let `
(t)
i j
denote the differ-
ence between the predicted rating and the real rating
from user i to item j at epoch t (i.e., `
(t)
i j
:
= (ˆr
(t)
i j
−r
i j
)),
and for simplicity, we ignore the generalization terms
in Equation 2 (i.e., set λ to zero). If we apply the over-
parameterized MF model, the partial derivatives of the
loss function to the variables w
1
and to the variable ˜p
i
are shown in Equation 4 and Equation 5, respectively.
∇
w
1
= `
i j
(w
2
˜p
i
˜q
j
) (4)
∇
˜p
i
= `
i j
(w
1
w
2
˜q
j
) (5)
The values of p
i
in Equation 1 can be recon-
structed by w
1
˜p
i
in Equation 3. We use vanilla
SGD to update w
1
and ˜p
i
, as shown below.
p
(t+1)
i
= w
(t+1)
1
˜p
(t+1)
i
=
w
(t)
1
− η∇
w
(t)
1
˜p
(t)
i
− η∇
˜p
(t)
i
= w
(t)
1
˜p
(t)
i
− η
w
(t)
1
∇
˜p
(t)
i
+ ˜p
(t)
i
∇
w
(t)
1
+ O(η
2
)
≈ w
(t)
1
˜p
(t)
i
−ηw
(t)
1
`
(t)
i j
w
(t)
1
w
(t)
2
˜q
(t)
j
− η ˜p
(t)
i
`
(t)
i j
w
2
˜p
(t)
i
˜q
(t)
j
= p
(t)
i
− β
(t)
∇
p
(t)
i
− γ
(t)
p
(t)
i
,
(6)
where β
(t)
:
= ηw
(t)
1
w
(t)
1
, γ
(t)
:
=
η`
(t)
i j
w
(t)
2
w
(t)
1
˜p
(t)
i
˜q
(t)
j
( denotes the
Hadamard division, i.e., elementwise division), and η
is the learning rate. O(η
2
) is ignored since it is close
to zero.
Following the discussion in (Arora et al., 2018), if
the values of w
(0)
1
and ˜p
(0)
i
are initialized to close to
zero vectors, then p
(0)
i
would also be close to a zero
DeLTA 2020 - 1st International Conference on Deep Learning Theory and Applications
92
vector. Thus, p
(t)
i
is close to a weighted combination
of the previous gradients. Therefore, we may further
rewrite Equation 6 in the following form.
p
(t+1)
i
= p
(t)
i
−β
(t)
∇
p
(t)
i
−γ
(t)
t−1
∑
τ=1
µ
(t,τ)
∇
p
(τ)
i
!
,
(7)
where µ
(t,τ)
is regarded as a time-varying and adaptive
momentum coefficient.
As shown in Equation 7, the update of p
i
corre-
sponds to SGD with momentum, and the learning rate
β
(t)
and the momentum coefficient µ
(t,τ)
are epoch-
varying and adaptive. Additionally, each element of
p
i
has a different learning rate in the same epoch.
Similarly, we can show that the update of q
j
fol-
lows Equation 8.
q
(t+1)
j
= q
(t)
j
− δ
(t)
∇
q
(t)
j
− ζ
(t)
t−1
∑
τ=1
ξ
(t,τ)
∇
q
(τ)
j
!
,
(8)
where δ
(t)
:
= ηw
(t)
2
w
(t)
2
, ζ
(t)
:
=
η`
(t)
i j
w
(t)
1
w
(t)
2
˜p
(t)
i
˜q
(t)
j
, and ξ
(t,τ)
is a
time-varying and adaptive momentum coefficient.
In other words, the update of q shares similar
properties to the update of p we showed above – mo-
mentum, adaptive learning rate, and different learning
rates for different parameters within the same epoch.
Since these modern optimization techniques are im-
plicitly applied, it is likely to converge faster than the
standard matrix factorization model,
4 EXPERIMENTS
4.1 Experimental Datasets
We use 5 public datasets with different rat-
ing scales and different densities as the exper-
imental data, including Epinions product review
dataset (Massa et al., 2008), MovieLens-1M rat-
ing dataset (ml-1m) (Harper and Konstan, 2016),
FilmTrust dataset (Guo et al., 2013), Yahoo! Movies
rating dataset (ymovies) (Marlin and Zemel, 2009;
Marlin et al., 2012), and Amazon Musical In-
struments product rating dataset (AMI) (He and
McAuley, 2016). Table 1 shows the statistics of these
datasets, including the number of unique users, the
number of unique items, the number of users’ ratings
on the items, the rating scales, and the density (i.e.,
the number of ratings divided by the product of the
number of users and the number of items).
4
5
6
0 50 100 150 200
Epoch
MSE
Type
OP_SGD
SGD
3
4
5
0 50 100 150 200
Epoch
MSE
Type
OP_Adagrad
Adagrad
4.5
5.0
5.5
6.0
0 50 100 150 200
Epoch
MSE
Type
OP_Adadelta
Adadelta
1.5
2.0
2.5
3.0
3.5
4.0
0 50 100 150 200
Epoch
MSE
Type
OP_RMSprop
RMSprop
1.5
2.0
2.5
3.0
3.5
0 50 100 150 200
Epoch
MSE
Type
OP_Adam
Adam
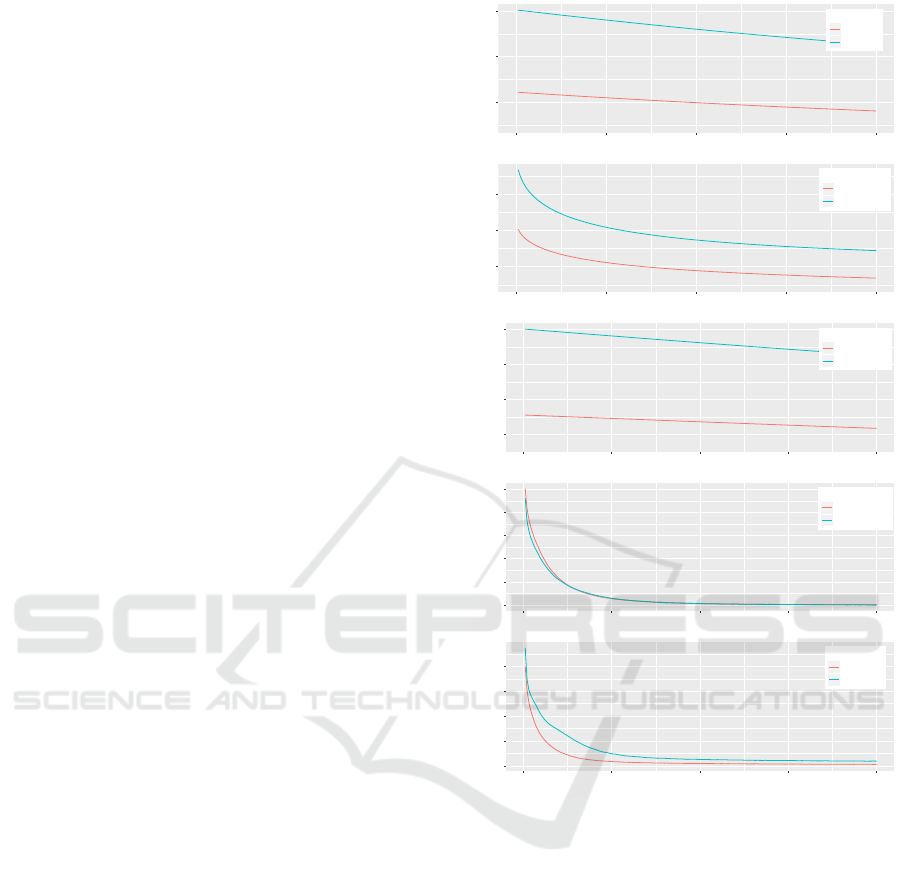
Figure 2: Mean squared error values vs epoch counts of dif-
ferent optimizers on the original and the overparameterized
MF on the Epinions dataset.
4.2 Experimental Design
For each of the experimented datasets, we randomly
selected 80% of the ratings as the training data and
the remaining 20% as the test data.
We used the following optimizers to update the pa-
rameters of the original matrix factorization model:
vanilla SGD, AdaGrad, Adadelta, RMSprop, and
Adam, which were labeled SGD, AdaGrad, Adadelta,
RMSprop, and Adam, respectively. Additionally, we
used the same set of optimizers to update the param-
eters of the overparameterized matrix factorization
model. We labeled them as OP_SGD, OP_AdaGrad,
OP_Adadelta, OP_RMSprop, and OP_Adam.
Accelerating Matrix Factorization by Overparameterization
93

Table 1: Statistics of the benchmark datasets.
Dataset # users # items # ratings Density Rating scale
Epinions 40,163 139,738 664,824 0.0118% [1, 2, 3, 4, 5]
MovieLens-1M 6,040 3,706 1,000,209 4.4684% [1, 2, 3, 4, 5]
FilmTrust 1,508 2,071 35,497 1.1366% [0.5, 1, 1.5, 2, 2.5, 3, 3.5, 4]
Yahoo! Movies 7,642 11,916 221,367 0.2431% [1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13]
AMI 339,231 83,046 500,176 0.0018% [1, 2, 3, 4, 5]
Table 2: Test MSE of different models and different optimizers at 50
th
and 200
th
epochs. For each OP <X> and <X> pair, we
highlight the one that better predicts the ratings (i.e., lower mean squared error score).
Epinions MovieLens-1M FilmTrust Yahoo! Movies AMI
Epoch count 50 200 50 200 50 200 50 200 50 200
OP SGD 4.6533 4.5395 4.1771 3.8116 3.3948 3.2023 21.1163 18.2237 4.6698 4.5319
SGD 5.8939 5.5520 5.1323 4.0176 5.0633 4.7147 35.9105 35.1064 5.9421 5.6456
OP AdaGrad 4.2649 4.0729 3.5258 2.9000 2.9252 2.6941 18.4577 16.3162 4.3916 4.2499
AdaGrad 5.0220 4.5538 3.6354 2.8018 4.5552 4.0493 34.9579 34.6572 5.3836 5.0689
OP Adadelta 4.6590 4.5886 4.2465 4.0167 3.5449 3.4816 23.7097 22.0213 4.7233 4.6365
Adadelta 5.9347 5.7533 5.4530 4.7247 5.2721 5.1980 36.8563 36.2128 6.0604 5.8919
OP RMSprop 1.7400 1.5227 1.2523 1.2497 1.2619 1.0156 13.0354 12.9759 2.9023 2.1157
RMSprop 1.7423 1.5187 1.2512 1.2505 1.3179 0.9876 34.3407 34.3407 3.2816 2.1889
OP Adam 1.7607 1.6335 1.2549 1.2508 1.3451 1.1072 13.0758 12.9767 2.9313 2.5787
Adam 1.6948 1.5934 1.2541 1.2505 1.4430 1.0867 34.3789 34.3789 3.2248 2.6011
4.3 Convergence Speed
Here, we show the comparison of the convergence
speed between the original MF model and the over-
parameterized MF model based on fixed optimizers.
The top subfigure of Figure 2 shows the relationship
between the training mean squared error (MSE) and
the epoch when using SGD as the optimizer for the
original MF model and the overparameterized MF
model. We report the training MSE score here be-
cause we want to compare the optimization speed
but not the generalizability of the models. As seen,
the overparameterized MF model obtained better pa-
rameters with fewer epochs. We also showed similar
comparisons on other optimizers, including AdaGrad,
Adadelta, RMSprop, and Adam. As shown in the
other subfigures of Figure 2, in almost all cases, the
overparameterized MF model requires significantly
fewer epochs to reach decent results. The only excep-
tion is RMSprop, in which the overparameterized MF
model requires slightly more epochs than the standard
MF model initially.
To validate the observation, we conducted simi-
lar experiments on other datasets, including Amazon
Musical Instruments, FilmTrust, MovieLens-1M, and
Yahoo! Movies. We observed similar results on all
these datasets. To save space, we do not include these
figures. However, from Figure 1, it is clear that, on
average, the overparameterized MF converged much
faster in the first 50 epochs.
4.4 Model Accuracy
We have shown that when fixing the optimizer, the
overparameterized MF model converged faster than
the standard MF model. In this section, we show
the comparison of the generalizability for the stan-
dard MF model and the overparameterized MF model
when they used the same optimizer.
We generated the models based on the training
data and computed the MSE scores based on the test
data. Table 2 shows the result at the 50
th
and the 200
th
epoch. As seen, in nearly all cases, the overparam-
eterized MF better predicts the testing rating scores
(i.e., smaller MSE score) compared to the standard
MF model, when both the overparameterized and the
standard MF used the identical optimizer. This im-
plies that the overparameterized model, albeit with re-
dundant parameters, did not seem to overfit the train-
ing data. We believe this is because both models have
the same hypothesis space.
4.5 Training Time
Although the overparameterized model required
much fewer epochs to obtain decent parameters, the
overparameterized model needed to update more pa-
rameters within one epoch. This may raise the follow-
ing concern – if the overparameterized model requires
more computation time to accomplish one epoch,
does the overparameterized model truly use a shorter
amount of time to converge?
DeLTA 2020 - 1st International Conference on Deep Learning Theory and Applications
94

Table 3: The required training seconds per epoch for different models and different optimizers.
Epinions MovieLens-1M FilmTrust Yahoo! Movies AMI
OP SGD 7.6626 5.9525 0.2729 1.5940 7.4439
SGD 7.6017 5.7957 0.2552 1.5619 7.4621
OP AdaGrad 9.5333 6.2044 0.2776 1.7297 10.4498
AdaGrad 9.5743 6.1554 0.2689 1.6902 10.4668
OP Adadelta 12.7689 6.5984 0.2857 1.8528 16.7022
Adadelta 12.7604 6.5121 0.2772 1.8310 17.4254
OP RMSprop 10.1062 6.1898 0.2774 1.7688 11.3391
RMSprop 9.8776 6.1778 0.2758 1.7213 11.7359
OP Adam 11.2647 6.3480 0.2818 1.8020 13.0728
Adam 11.0878 6.2927 0.2651 1.7836 13.6885
To validate this, we empirically tested the com-
putation time of one epoch for each method on the
5 tested datasets. We conducted these experiments
on a standard desktop computer with an Nvidia RTX
2080Ti video card. The results are shown in Ta-
ble 3. If we compare each pair of OP <X> and <X>,
it appears that the overparameterized model required
slightly longer training time on average.
To quantify the relative training time of different
methods for every dataset, we used SGD as the com-
pared baseline. We computed the relative training
time per epoch of method x on the dataset d by Equa-
tion 9.
r
hdi
x
=
t
hdi
x
t
hdi
SGD
, (9)
where t
hdi
x
denotes the running time per epoch of
method x on the dataset d. For example, t
hE pinionsi
OP SGD
=
7.6626, and so r
hE pinionsi
OP SGD
= 7.6626/7.6017 ≈ 1.0080,
which means SGD was 1.0080 times faster than
OP SGD to finish one epoch.
We computed the average relative training time by
the geometric mean of the relative training time on
different datasets, as defined by Equation 10. We used
the geometric mean instead of the arithmetic mean be-
cause the geometric mean is appropriate for the aver-
age of relative proportion measures.
r
x
=
∏
d
r
hdi
x
!
1/n
(10)
The r
x
values are the x-axis of each method in Fig-
ure 1. Similarly, for each method, we computed the
average relative MSE scores using SGD as the base-
line. The results are the y-axis in Figure 1. As a result,
this figure summarizes our experimental results. First,
applying an optimizer on the overparameterized MF
model requires fewer epochs to obtain decent param-
eters, compared to using the same optimizer on the
standard MF model. Second, if we compare the run-
ning time of one epoch, applying an optimizer on the
standard MF model is usually faster but only slightly
faster. Overall, using the overparameterized model is
still highly beneficial.
5 DISCUSSION
This paper studied overparameterization on the ma-
trix factorization model, both theoretically and em-
pirically. We proposed one possible method for over-
parameterizing the matrix factorization model. We
mathematically showed that applying the vanilla SGD
optimizer on the overparameterization MF implies
using the SGD with momentum and adaptive learn-
ing rate on each learnable parameter. We conducted
experiments on many public datasets to show that
an overparameterized MF model with popular opti-
mizers (e.g., Adam and RMSprop) converges faster
than the standard MF model with the same optimiz-
ers. Both the theoretical analysis and the empirical
results indicate that overparameterization accelerates
the optimization of the matrix factorization model.
Therefore, whenever matrix factorization is needed,
we suggest using the overparameterized version pro-
posed in this paper to accelerate the training process.
Such a technique can be applied to a wide range of ap-
plications and systems that leverage MF or its variants
as the core algorithm.
Although we have shown an overparameterized
MF model, this is not the only method for overpa-
rameterizing the MF model. For example, the model
proposed in (Chen, 2017) is also an overparameter-
ized MF model. However, that work was motivated
from a different perspective and did not formally dis-
cuss the connection among overparameterization, op-
timization, and the model per se. Since there can
be multiple methods for overparameterizing the MF
model, it could be interesting to study the connec-
tion between different overparameterized MF models,
Accelerating Matrix Factorization by Overparameterization
95

and further validate whether other overparameterized
models also accelerate the optimization process. This
is one of the topics we are interested in continuing.
Another possible future work is to overparameter-
ize other supervised learning-based recommendation
models, such as factorization machine, NeuralCF, and
Wide & Deep. We are interested in investigating, both
theoretically and empirically, the optimization speed
of these models when these models are overparame-
terized.
ACKNOWLEDGEMENTS
We acknowledge partial support by the Ministry of
Science and Technology in Taiwan under Grant No.:
MOST 107-2221-E-008-077-MY3.
REFERENCES
Arora, S., Cohen, N., and Hazan, E. (2018). On the opti-
mization of deep networks: Implicit acceleration by
overparameterization. In International Conference on
Machine Learning.
Behera, L., Kumar, S., and Patnaik, A. (2006). On adaptive
learning rate that guarantees convergence in feedfor-
ward networks. IEEE Transactions on Neural Net-
works, 17(5):1116–1125.
Chen, H.-H. (2017). Weighted-SVD: Matrix factorization
with weights on the latent factors. arXiv preprint
arXiv:1710.00482.
Chen, H.-H. (2018). Behavior2Vec: Generating distributed
representations of users’ behaviors on products for
recommender systems. ACM Transactions on Knowl-
edge Discovery from Data (TKDD), 12(4):43.
Chen, H.-H. and Chen, P. (2019). Differentiating regular-
ization weights–a simple mechanism to alleviate cold
start in recommender systems. ACM Transactions on
Knowledge Discovery from Data (TKDD), 13(1).
Chen, H.-H., Chung, C.-A., Huang, H.-C., and Tsui, W.
(2017). Common pitfalls in training and evaluating
recommender systems. ACM SIGKDD Explorations
Newsletter, 19(1):37–45.
Cheng, H.-T., Koc, L., Harmsen, J., Shaked, T., Chandra,
T., Aradhye, H., Anderson, G., Corrado, G., Chai,
W., Ispir, M., et al. (2016). Wide & deep learning
for recommender systems. In Proceedings of the 1st
Workshop on Deep Learning for Recommender Sys-
tems, pages 7–10. ACM.
Du, S. S., Zhai, X., Poczos, B., and Singh, A. (2019). Gra-
dient descent provably optimizes over-parameterized
neural networks. In 6th International Conference on
Learning Representations, ICLR 2018.
Duchi, J., Hazan, E., and Singer, Y. (2011). Adaptive sub-
gradient methods for online learning and stochastic
optimization. Journal of Machine Learning Research,
12(Jul):2121–2159.
Graves, A. (2013). Generating sequences with recurrent
neural networks. arXiv preprint arXiv:1308.0850.
Grbovic, M., Radosavljevic, V., Djuric, N., Bhamidipati,
N., Savla, J., Bhagwan, V., and Sharp, D. (2015). E-
commerce in your inbox: Product recommendations
at scale. In Proceedings of the 21th ACM SIGKDD In-
ternational Conference on Knowledge Discovery and
Data Mining, pages 1809–1818. ACM.
Guo, G., Zhang, J., and Yorke-Smith, N. (2013). A novel
bayesian similarity measure for recommender sys-
tems. In Twenty-Third International Joint Conference
on Artificial Intelligence.
Guo, H., Tang, R., Ye, Y., Li, Z., and He, X.
(2017). Deepfm: a factorization-machine based
neural network for ctr prediction. arXiv preprint
arXiv:1703.04247.
Harper, F. M. and Konstan, J. A. (2016). The movielens
datasets: History and context. ACM Transactions on
Interactive Intelligent Systems, 5(4):19.
He, R. and McAuley, J. (2016). Ups and downs: Mod-
eling the visual evolution of fashion trends with one-
class collaborative filtering. In Proceedings of the 25th
International Conference on World Wide Web, pages
507–517. International World Wide Web Conferences
Steering Committee.
He, X., Liao, L., Zhang, H., Nie, L., Hu, X., and Chua, T.-S.
(2017). Neural collaborative filtering. In Proceedings
of the 26th International Conference on World Wide
Web, pages 173–182. International World Wide Web
Conferences Steering Committee.
J
¨
arvelin, K. and Kek
¨
al
¨
ainen, J. (2002). Cumulated gain-
based evaluation of ir techniques. ACM Transactions
on Information Systems, 20(4):422–446.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Koren, Y., Bell, R., and Volinsky, C. (2009). Matrix factor-
ization techniques for recommender systems. Com-
puter, (8):30–37.
Kurucz, M., Bencz
´
ur, A. A., and Csalog
´
any, K. (2007).
Methods for large scale svd with missing values. In
Proceedings of KDD Cup and Workshop, volume 12,
pages 31–38.
Luo, X., Zhou, M., Xia, Y., and Zhu, Q. (2014). An
efficient non-negative matrix-factorization-based ap-
proach to collaborative filtering for recommender sys-
tems. IEEE Transactions on Industrial Informatics,
10(2):1273–1284.
Marlin, B., Zemel, R. S., Roweis, S., and Slaney, M. (2012).
Collaborative filtering and the missing at random as-
sumption. arXiv preprint arXiv:1206.5267.
Marlin, B. M. and Zemel, R. S. (2009). Collaborative pre-
diction and ranking with non-random missing data. In
Proceedings of the third ACM Conference on Recom-
mender systems, pages 5–12. ACM.
Massa, P., Souren, K., Salvetti, M., and Tomasoni, D.
(2008). Trustlet, open research on trust metrics. Scal-
able Computing: Practice and Experience, 9(4).
Piatetsky, G. (2007). Interview with Simon Funk. ACM
SIGKDD Explorations Newsletter, 9(1):38–40.
DeLTA 2020 - 1st International Conference on Deep Learning Theory and Applications
96

Prechelt, L. (1998). Automatic early stopping using cross
validation: quantifying the criteria. Neural Networks,
11(4):761–767.
Qian, N. (1999). On the momentum term in gradi-
ent descent learning algorithms. Neural Networks,
12(1):145–151.
Rendle, S. (2010). Factorization machines. In 2010 IEEE
International Conference on Data Mining, pages 995–
1000. IEEE.
Srivastava, N., Hinton, G., Krizhevsky, A., Sutskever, I.,
and Salakhutdinov, R. (2014). Dropout: a simple way
to prevent neural networks from overfitting. The Jour-
nal of Machine Learning Research, 15(1):1929–1958.
Steck, H. (2013). Evaluation of recommendations: rating-
prediction and ranking. In Proceedings of the 7th
ACM Conference on Recommender systems, pages
213–220.
Sutskever, I., Martens, J., Dahl, G., and Hinton, G. (2013).
On the importance of initialization and momentum in
deep learning. In International Conference on Ma-
chine Learning, pages 1139–1147.
Tibshirani, R. (1996). Regression shrinkage and selection
via the lasso. Journal of the Royal Statistical Society:
Series B (Methodological), 58(1):267–288.
Whittaker, G., Confesor, R., Di Luzio, M., Arnold, J., et al.
(2010). Detection of overparameterization and over-
fitting in an automatic calibration of SWAT. Transac-
tions of the ASABE, 53(5):1487–1499.
Wong, S. C., Gatt, A., Stamatescu, V., and McDonnell,
M. D. (2016). Understanding data augmentation for
classification: when to warp? In 2016 International
Conference on Digital Image Computing: Techniques
and Applications (DICTA), pages 1–6. IEEE.
Zeiler, M. D. (2012). ADADELTA: an adaptive learning
rate method. arXiv preprint arXiv:1212.5701.
Accelerating Matrix Factorization by Overparameterization
97
