Future Parking Applications: Wireless Sensor Network Positioning for
Highly Automated in-House Parking
Andrea Jung
a
, Paul Schwarzbach
b
and Oliver Michler
Institute of Traffic Telematics, Technische Universit
¨
at Dresden, Germany
Keywords:
Future Parking, Automated Parking, Wireless Sensor Network WSN, Markov Localization.
Abstract:
One of the bottlenecks for motorized individual transportation for end-to-end trips is the search for parking
space. Common solutions to minimize spatial needs are in-house parking garages, but even in those, find-
ing available parking lots can be quite time consuming. In this contribution we therefore present a cheap
and retrofittable parking system, enabling automated entrance to parking lot reservation, navigation and clear-
ing for already existing parking garages. One of its key component is a robust indoor positioning based on
Wireless Sensor Networks (WSN) enabling vehicle independent and automated routing. We will provide a
general overview of WSN measurement principles and propose two possible technology candidates, a 2.4
GHz narrow-band technology and Ultra-Wide Band (UWB). Furthermore, a robust range-only positioning
approach utilizing Markov Localization, called Probability Grid Positioning (PGP), is presented. With the
help of UWB and IEEE 802.15.4 ranging modules the algorithm is qualitatively evaluated with measurements
in a car park in Leipzig, Germany. Our proposed PGP approach leads to overall smoother trajectories com-
pared to a state-of-the-art Least Squares Estimation (LSE) and thus achieves accurate and robust positioning
in demanding heavy-multipath environments. This can build the foundation for future work in the field of
highly-automated in-house parking.
1 INTRODUCTION
Mobility is one of humanity’s fundamental needs.
With a worldwide constant increase of urbanization
energy-, time- and space-efficiency for transportation
processes are indispensable. For motorized individual
traffic, the search for parking space is the bottleneck
of efficient source to sink tours in urbanized areas.
Many kilometers are covered by a car driver in search
of free parking lots every year. For this reason, the fo-
cus of Future Parking solutions is becoming increas-
ingly important in research and development.
Since parking space on streets or open areas are
extremely limited in cities, parking garages or under-
ground car parks are often provided alternatively. For
indoor parking applications, there are approaches that
use Wireless Sensor Networks (WSN) to support the
driver in finding a parking space up to fully automated
parking approaches where the driver simply leaves the
vehicle in front of the parking garage (Friedl et al.,
2015).
a
https://orcid.org/0000-0003-1019-6134
b
https://orcid.org/0000-0002-1091-782X
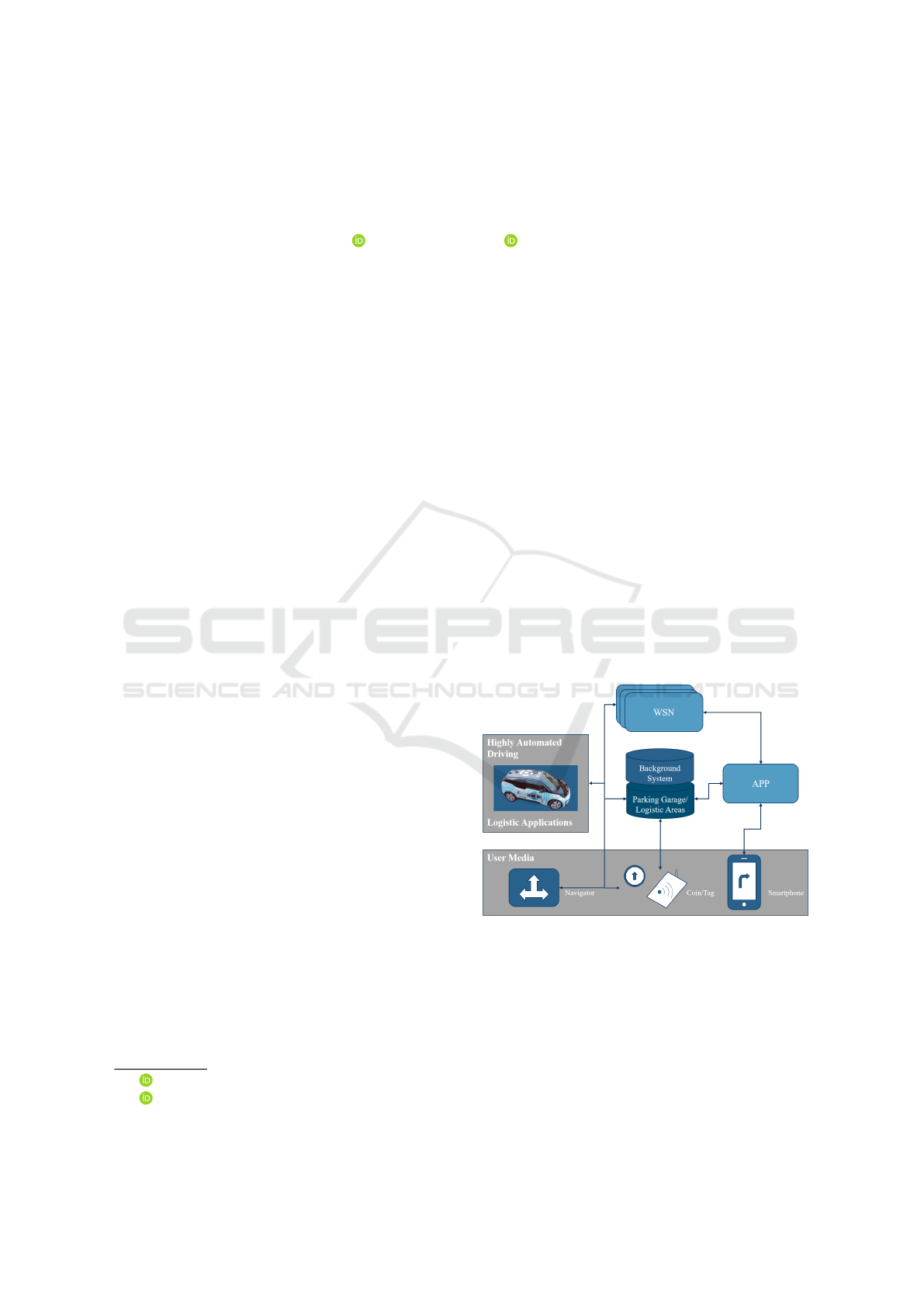
Figure 1: System overview.
(Ibisch et al., 2013) present a system for localization
and tracking of vehicles in a parking garage using
a network of Light Detection and Ranging (LIDAR)
sensors. These LIDAR sensors, which are embedded
in the environment, are adjusted near the ground and
parallel to the ground level to enable measuring points
on the wheels as a basis for detection. An advantage
of the system is the accuracy on wide lanes, while
other sensors fail due to their limited range.
710
Jung, A., Schwarzbach, P. and Michler, O.
Future Parking Applications: Wireless Sensor Network Positioning for Highly Automated in-House Parking.
DOI: 10.5220/0009891107100717
In Proceedings of the 17th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2020), pages 710-717
ISBN: 978-989-758-442-8
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

(Crisostomo et al., 2019) proposed an image-
processing based smart parking system for multi-
storey parking garages. The system was validated
with several video-feeds from different in-house park-
ing garages. It determines whether the parking lots
are occupied by indicating a red outline if a car is oc-
cupying a parking space and then turns green when it
is unoccupied.
An approach using light sensors to determine the
presence of a vehicle is presented in (Srikanth et al.,
2009). The WSN subsystem forwards the information
to a management server which transmits the occu-
pancy information of the parking spaces to the guid-
ing nodes and entrance system. A full-featured proto-
type model was implemented in order to validate the
parking management system which includes also the
availability of reservation.
Fully automated car parking relies often on me-
chanical handling. (Eswaran et al., 2013) proposed
a lift mechanism which transports the car to an allo-
cated parking lot. Various sensors, motors and soft-
ware are necessary to detect and transport the car.
The disadvantage of these systems is the initial cost
of building such parking garages. Another approach
uses the conventional concrete garages that can be
transformed into an automated parking system with-
out the deployment of sensors in each of the parking
lots (Nayak et al., 2013). The presented technology
uses robotic valets, which are the vehicle carriers that
park them compactly in a given space of the parking
area.
While these approaches and parking garages us-
ing robotic valet parking systems in general are very
promising in regards to time and space efficiency,
they are usually newly built at high costs. Hence, we
present an approach in which existing parking garages
can be retrofitted cost-effectively with an entrance to
parking lot booking and navigation system, enabling
a completely new car park management concept. Fig-
ure 1 gives an overview of the in-house parking tech-
nology with an automated booking system. In ad-
dition to the goal of intelligent control of parking
garages, the inner-city traffic flow is also to be con-
trolled. On the basis of this technology, for exam-
ple, parking spaces can be sublet or micro-hubs can
be implemented for inner-city logistics. Specifically,
a radio-based indoor localization technology is being
developed, whereby vehicles are navigated from the
barrier at the entrance to the booked parking space
using a Sensor-Tag (Coin) (cf. figure 2) and a Parking
App. Only the infrastructure and no vehicle informa-
tion is used with this technology. The great advan-
tage of this approach is therefore the independence
from different vehicle features and the possibility to
also deploy the system with so-called legacy vehicles.
Via the background system the car park operator can
monitor the current parking space occupancy and the
current events in the car park in real time using the
monitoring portal.
Figure 2: Test vehicle with sensor tag on the dashboard.
Next to presenting the previously described system,
this contribution discusses different technologies for
WSN indoor positioning, as a robust positioning is a
key feature for navigation within the parking garage.
For applications with high demands in terms of accu-
racy, range-based approaches (cf. section 3) are often
utilized, directly measuring distances between fixed
anchors and mobile tags. In our conducted work, we
discuss both the usage of Ultra-Wide Band (UWB)
and a narrow-band technology at 2.4 GHz for the de-
scribed application. Furthermore, a robust position
estimation scheme is presented, utilizing Markov Lo-
calization, also referred to as Probability Grid Posi-
tioning (PGP), which is compared to a state-of-the-art
positioning method, revealing its superiority in terms
of accuracy.
The rest of the paper is organized as follows: sec-
tion 2 provides an overview of the proposed auto-
mated in-house parking system, followed by section
3 giving an overview on available measurement prin-
ciples to obtain spatial information within a WSN as
well as the discussion on possible technology candi-
dates as a basis for robust indoor positioning. Finally,
section 4 introduces a robust state estimation based
on a presented Markov Localization approach. The
paper concludes with a summary and proposals for
future research work in section 5.
2 SYSTEM OVERVIEW
In this section we provide an overview of the pro-
posed automated in-house parking system in detail
Future Parking Applications: Wireless Sensor Network Positioning for Highly Automated in-House Parking
711
especially about the necessary infrastructure and in-
formation technology. A general overview of our ap-
proach gives figure 1 as already described in section
1.
The WSN as basis for the robust indoor position-
ing consists of fixed anchors distributed in the parking
garage and mobile tags which are issued to the driver
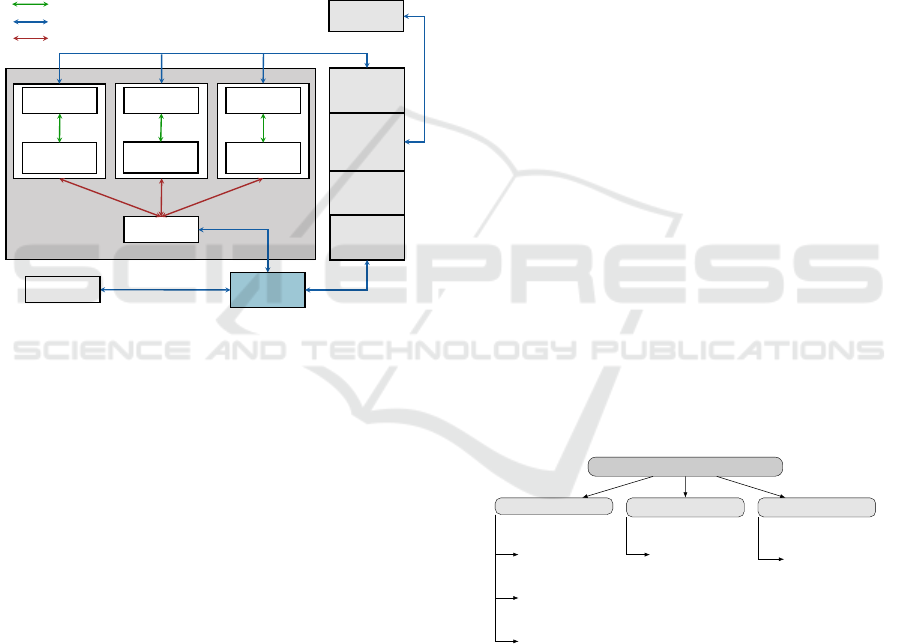
at the barrier. Figure 3 shows the physical architecture
of our proposed automated in-house parking system.
The anchors are linked to multiband antennas via a
serial interface. This opens up the possibility of cov-
ering several frequency bands with a single radiating
element. Details about the WSN including its special
aspects are described in the following sections.
WSN
Anchors
Multiband
Antenna
Anchors Anchors
Multiband
Antenna
Multiband
Antenna
Access
Technique
Computing Unit
-
Positioning
Computing Unit
-
Map Data
Computing Unit
-
Parking Garage
Management
Tags
AP
Computing Unit
-
App-Portal
Serial
Communication Link
WSN
Vehicles
1
Figure 3: Physical architecture.
Besides the WSN and its components there are dif-
ferent computing units for the automated processes.
Each mobile tag transmits his radio-frequency data
over a central Access Point (AP) to the positioning
computing unit where the sensor information is used
to estimate the position of the vehicle. A possible ap-
proach to robust positioning is proposed in section 3.
The computing unit for the map data is responsible
for the upper-level navigation process from the bar-
rier to the booked parking lot. In addition to the static
and dynamic map data of the entire parking garage,
the trajectories to each parking space for the route
guidance are also stored in this unit. Robust and pre-
cise positioning is an essential requirement for au-
tonomous driving. With a digital map, the errors of
a positioning system can be compensated by suitable
map matching algorithms. For the whole booking and
reservation process as well as the monitoring of the
parking space occupancy the management computing
unit is used which controls the access technique based
on all processed events.
The communication link (e.g. WiFi or in the fu-
ture 5G) between the individual subsystems offers
a reliable communication to provide centrally pro-
cessed position data in the vehicles. This enables a
coupling with the navigation system of the vehicle for
future automated processes.
3 INDOOR POSITIONING:
WIRELESS SENSOR
NETWORKS
For indoor applications specifically, the go-to posi-
tioning technology Global Navigation Satellite Sys-
tem (GNSS) is typically not available or its perfor-
mance is degraded up to the point, where reliable po-
sition estimation is not possible anymore. Therefore,
different technologies have to be exploited. Since this
contribution presents a system which is intended to
be retrofitted in existing parking garages and indepen-
dent of any sensor information provided by customers
and their cars, only several approaches are applicable.
3.1 WSN Localization
As already stated, the proposed future parking sys-
tem aims to provide a retrofittable and vehicle in-
dependent indoor positioning system, leading to re-
strictions for localization baseline technology selec-
tion as on-board sensors like Inertial Measurement
Units (IMUs) cannot be used. Similar to GNSS, WSN
can determine geometric relations utilizing transmit-
ted and received signal properties. Figure 4 gives an
overview of different principles to obtain geometric
relations within a WSN.
Spatial Information in WSN
Distance
Runtime-based
PoA
RSS
Angle
AoA
Proximity
Connectivity
based
Figure 4: Overview of different measurement principles in
WSN used to obtain spatial information.
In general, WSN localization approaches are clas-
sified between range-based and range-free methods
(Mendoza-Silva et al., 2019). Range-free methods
mainly include proximity based methods like Cen-
troid or DV-HOP (Paul and Sato, 2017). The main
advantage of these approaches are their cheapness,
low complexity and energy efficiency. However, the
resulting accuracies are highly dependent on various
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
712

influences like network topology and density of nodes
(Mesmoudi et al., 2013).
We therefore focus on range-based methods,
which generally include both distance and angle mea-
surements as input information. Since the incor-
poration of additional hardware like antenna arrays
are necessary for Angle of Arrival (AoA) estimation,
these are not considered for our described use case.
3.2 Range-only Localization
The most common localization applications for WSN
include distance based methods. Up first, Received
Signal Strength (RSS) measurements can easily be
used as they are provided by almost all radio devices.
The concept behind this approach is to use channel
models for the occurring path loss considering known
transmission power and hardware (e.g. antenna gain)
and estimating distances in comparison with the mea-
sured RSS. However RSS distance measurements are
not very robust as the environment has a large impact
on possible fading occurrences (slow and fast fad-
ing). Additionally, channel modelling can be a dif-
ficult task. To overcome these downsides, RSS profil-
ing or fingerprint approaches can be applied, creating
a map with signal strengths for different locations be-
forehand. However, accuracies are still fluctuant es-
pecially in challenging environments (cf. figure 5).
The measurement of the phase shift, also known
as Phase of Arrival (PoA), is another common method
for determining the distance between two sensor
nodes. One advantage of this method is that the
transceivers do not need to be synchronized in time
(Bensky, 2008). The PoA concept makes use of the
phase difference of two different frequencies caused
by a signal propagation delay and estimates the dis-
tance between the two sensors with their transceivers.
The PoA method is extremely suitable for applying
ranging for narrow-band radio-frequency transmis-
sion systems.
Runtime-based distance measurements include a
variety of measurement principles, such as Time of
Arrival (ToA), Time Difference of Arrival (TDoA),
Two-Way ToA or Symmetrical Double-Sided Two-
Way Ranging (SDS-TWR). The distance measure-
ment in ToA procedures is made possible by deter-
mining the signal propagation time (Bensky, 2008).
Such a Time of Flight (ToF) measurement is per-
formed by recording different time stamps of trans-
mitted and received messages. This requires precise
synchronization between transmitter and receiver. To
avoid this source of error, the Two-Way ToA method
is based on measuring the signal propagation time
twice based on an asynchronous and asymmetrical
process. The SDS-TWR method can be seen as an ex-
tension of the Two-Way ToA. In contrast, it is based
on a symmetrically initialized measurement of the
distance twice, thus on a total of 3 messages (Jiang
and Leung, 2007).
3.3 Used Hardware for Validation
To validate the robust range-only approach proposed
in detail in section 4 we use two different WSN tech-
nologies. Table 1 shows a comparison of the 2.4 GHz
narrow-band technology from Metirionic (Metirion-
icGmbH, 2020) and the 6.5 GHz UWB MDEK1001
evaluation kit from Decawave (Decawave, 2017).
Table 1: Comparison of used WSN technologies.
2.4 GHz UWB
Standard IEEE 802.15.4 IEEE 802.15.4a
Frequency
Range
2400-2483.5
MHz
6240-6739.2
MHz
Point-
to-point
range
up to 1 km up to 60 m
(RTLS: 25 to
30 m)
Ranging
method
PoA, Advanced
ToA
Two-Way ToA
Hardware Demo-Kit Me-
tirionic GmbH
Decawave
MDEK1001
Both technologies are based on the IEEE 802.15.4
wireless standard. In contrast to UWB, the 2.4 GHz
Metirionic technology can be regarded as a narrow-
band wireless technology with 83 MHz bandwidth
(MetirionicGmbH, 2020). Its limited bandwidth
poses great challenges in determining the distance be-
tween two sensor nodes compared to UWB with about
500 MHz. However, the big advantage of the technol-
ogy is the long range and functionality in Non-Line-
of-Sight (NLOS) environments as well as in complex
environments (e.g. through several walls). Due to
the lower transmission power, the devices from De-
cawave have a smaller point-to-point range from up
to 60 m (Decawave, 2017). By using the Real-Time
Location System (RTLS) in combination with Blue-
tooth to access the raw data, this is limited to 30 m.
Future Parking Applications: Wireless Sensor Network Positioning for Highly Automated in-House Parking
713

4 ROBUST POSITIONING FOR
IN-HOUSE PARKING
4.1 Problem Formulation: Multipath
Environments
The quality of the distance measured using radio-
frequency techniques is highly dependent on the envi-
ronment and subject to certain propagation phenom-
ena, including Line-of-Sight (LOS), NLOS or multi-
path reception, leading to different effects in the mea-
surement domain. The effects of these occurrences
highly differ between possible technologies used for
obtaining distance information between anchors and
mobiles. An example for the variety of possible mul-
tipath reception paths in an parking garage obtained
by a radio wave simulation tool is depicted in figure 5.
The mobile tag is located between two parking rows
and is in a NLOS relation to one anchor mounted on
the ceiling.
Figure 5: Selective multipath reception between two park-
ing rows.
Without loss of generality, a ranging measurement R
is given as the sum of the true distance d
a
t
between a
tag t and an anchor a defined as d
a
t
=
k
x
a
− x
t
k
2
and
occurring measurement errors ε:
R = d
a
t
+ ε (1)
with x
t
= [X ,Y, Z]
|
and x
a
= [X , Y, Z]
|
representing
the three-dimensional tag and anchor positions in a
local cartesian coordinate system.
For ToF based distance measurements and with
respect to the previously mentioned types of signal
reception, ε includes the following possible distance
measurement errors:
• Gaussian (white) noise for LOS,
• (positive) ranging errors caused by NLOS,
• positive and negative ranging errors caused by
multipath interference and
• gross outliers.
These effects are tied to specific occurrence probabil-
ities, which differ depending on employed technolo-
gies as well as surroundings (e.g. UWB vs. narrow-
band technology or open space vs. indoor), but gen-
erally lead to non-gaussian measurement residuals.
These arbitrary or sometimes even multi modal mea-
surement distributions strongly degrade the perfor-
mance of state estimation approaches which rely on
normally distributed errors, such as Least Squares Es-
timation (LSE) or Extended Kalman Filtering (EKF).
To represent any non-gaussian and heavy-tailed
ranging residuals resulting from the occurences of the
described error types, we use Gaussian Mixture Mod-
els (GMM), which can approximate any type of arbi-
trary distribution using a variable amount of C Gaus-
sian components associated with different weights w,
means µ and variances Σ (2).
P ∼
C
∑
c
w
c
· N (µ
c
, Σ
c
) (2)
Figure 6 shows an exemplary heavy-tailed ranging
residual histogram as well as an approximation of the
underlying probability distribution using a GMM.
Figure 6: Histogram of heavy-tailed ranging residuals
(green) in an indoor environment, including a GMM
approximation of the underlying probability distribution
(blue).
4.2 Probability Grid Positioning
Based on the presented distance measurements, we
want to present a possible approach to robust position-
ing using a classical Markov Localization approach.
This method is a special kind of Recursive Bayes Fil-
ter (RBF), more specifically a Discrete Bayes Filter
(DBF), as it uses a discrete, ordered sample proba-
bilistic state space representation for state estimation.
Essentially, the presented Markov Localization real-
ization is a two-dimensional Histogram Filter (HF),
which is also referred to as PGP. The utilization of
a discrete state space representation over a Gaussian
(Kalman Filter) or a random sample (Particle Filter,
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
714

PF) representation was explicitly chosen for the fol-
lowing reasons:
• NLOS or multipath reception is inherent in the de-
scribed parking garage scenario, leading to non-
gaussian observation errors. These drastically de-
grade the accuracy of conventionally used state
estimation approaches like LSE or EKF.
• The state space only has to cover the inside park-
ing spaces, leading to a bounded state space, fa-
cilitating DBF applications.
• As described in section 2, positioning for all vehi-
cles is performed at a central instance. Unlike PF,
PGP samples are immovable, which means the de-
fined state space can be used for all participants.
The corresponding likelihoods or probabilities for
all grid cells are then stored individually.
Like any RBF respectively DBF implementation, the
presented approach follows a prediction-correction
structure as shown in figure 7. This structure esti-
mates the current state x
k
at timestep k with respect to
the last given state information x
k−1
based on Markov
assumption and Bayes’ Rule (Thrun et al., 2005).
Initialization
Prediction
p
k,i
Observation
p
k,i
Measurements
Measurements
Measurements
Estimation
ˆx
MAP
k = 0
k = 1 : N
Figure 7: Structure of PGP framework.
The simplest form of a sorted sample state space is an
equidistant grid (cf. figure 8b) (Burgard et al., 2011).
The predefined grid cells represent possible realiza-
tions of the state and their size constitutes the trade-
off between computational complexity and achievable
accuracies of the filter.
The DBF prediction step p
k,i
for the i-th grid cell
at k can then be formulated as:
p
k,i
=
∑
i
P(x
k,i
|x
k−1
)p
k−1,i
∀i = 1, 2, . . . , n (3)
The probability density from (3) is then combined
with the observation z
k
Likelihood function P(z
k
|x
k,i
)
and multiplied with a normalization factor η follow-
ing the Bayes’ theorem, resulting in the overall prob-
ability density representation at time-step k:
p
k,i
= ηP(z
k
|x
k,i
)p
k,i
(4)
(a) (b)
Figure 8: Visualization of a 2D distance measurement from
a known fix point (yellow): (a) Explicit circular position
line. (b) Sample based representation given noise.
This is also reffered to as the current belief Bel about
the current state. The final estimation of the current
vehicle position is obtained by maximizing p
k,i
, fol-
lowing the Maximum A-Posteriori estimation:
ˆx
k
= argmax
x
k
Bel(x
k
) (5)
Implementational details for PGP can be found in
(Thrun et al., 2005).
4.3 Performance Results
In this subsection we want to provide qualitative per-
formance results for both the introduced WSN tech-
nologies as well the performance of the proposed PGP
approach compared to a Gauss-Newton LSE. For this
purpose, several test drives in a parking garage in
Leipzig, Germany were performed (cf. figure 2). The
test run we are presenting went from the entrance of
the car park at the barrier at the top right side of figure
9 to parking space number 11, located at the middle
of the left side.
For the presented data set, two significant results
are observable:
• UWB generally provides higher ranging accura-
cies and less environmentally induced outliers,
leading to overall higher positioning accuracies.
• The proposed PGP approach manages to mitigate
outliers for both technologies, leading to overall
smoother trajectories compared with LSE.
The achieved accuracy of UWB depends on the high
bandwidth and thus the higher temporal resolution to
distinguish the direct path from the others. Despite
this fact, the narrow-band technology from Metiri-
onic GmbH is the focus of our future research work.
Due to the higher coverage (cf. subsection 3.3) the
infrastructure devices and thus costs can be reduced.
One way to compensate the distance-dependent loss
of accuracy of the ranging measurements is the use
Future Parking Applications: Wireless Sensor Network Positioning for Highly Automated in-House Parking
715
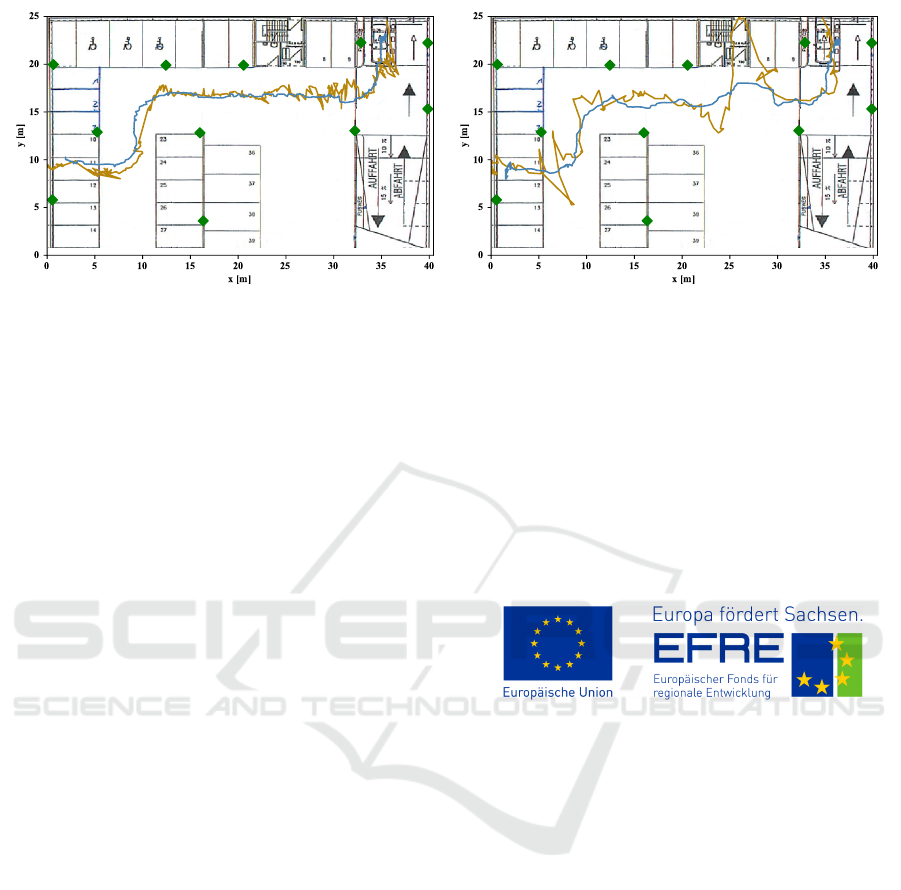
(a) UWB. (b) Narrow-Band 2.4 GHz.
Figure 9: Comparison of UWB (a) and narrow-band 2.4 GHz (b) ranging technologies, including fixed anchors points (green),
PGP estimation results (blue) and Gauss-Newton estimation (golden).
of beamforming antennas. In general, NLOS mea-
surements as well as multipath reception in a parking
garage (cf. Figure 5) can be compensated during po-
sition estimation with the PGP.
5 CONCLUSION
In this paper, we introduced a novel approach for
a highly automated parking for already existing in-
house parking areas, enabling efficient parking garage
management for operators and time saving park space
search for customer. A core component of this system
is robust indoor localization. We have discussed the
demands for accessible and vehicle independent sen-
sor information, leading to the application of WSNs.
For these, we have discussed and introduced several
localization and measurement principles. Lastly, a ro-
bust probabilistic state estimation approach for range-
only localization is introduced and qualitatively eval-
uated for in-house parking usage.
For further work, we want to put more empha-
sis on necessary performances as well as system ar-
chitectural to build a foundation for fully automated
parking. Additionally, we will conduct a comprehen-
sive quantitative validation for different setups, tech-
nologies and test drives. This will also include more
details on method implementation and a comparison
with other state-of-the-art positioning methods. The
overall goal is to qualify WSN based localization as a
key enabler for automated in-house parking.
ACKNOWLEDGEMENTS
This work has been supported by the European Union
and the State of Saxony within the project ”IVS-
AMP”. Additionally, the authors would like to thank
all involved cooperation partners, especially Metiri-
onic GmbH.
REFERENCES
Bensky, A. (2008). Wireless Positioning Technologies and
Applications. Artech House.
Burgard, W., Fox, D., and Thrun, S. (2011). Markov lo-
calization for mobile robots in dynamic environments.
CoRR, abs/1106.0222.
Crisostomo, C. I. C., Malalis, R. V. C., Saysay, R. S., and
Baldovino, R. G. (2019). A multi-storey garage smart
parking system based on image processing. In 2019
7th International Conference on Robot Intelligence
Technology and Applications (RiTA), pages 52–55.
Decawave (2017). Mdek1001 development kit - product
documentation. 2017.
Eswaran, P., Manikandan, A. V. M., and Godha, S. (2013).
Prototype of an underground multi-storied automated
car parking system. In 2013 IEEE International Con-
ference ON Emerging Trends in Computing, Commu-
nication and Nanotechnology (ICECCN), pages 674–
677.
Friedl, M., Hupka, A., and Tanzmeister, G. (2015). Vol-
lautomatisiertes valet parking: Funktions- und pla-
nungsarchitektur. 10. Workshop Fahrerassistenzsys-
teme.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
716

Ibisch, A., St
¨
umper, S., Altinger, H., Neuhausen, M.,
Tschentscher, M., Schlipsing, M., Salinen, J., and
Knoll, A. (2013). Towards autonomous driving in
a parking garage: Vehicle localization and tracking
using environment-embedded lidar sensors. In 2013
IEEE Intelligent Vehicles Symposium (IV), pages 829–
834.
Jiang, Y. and Leung, V. C. M. (2007). An asymmetric
double sided two-way ranging for crystal offset. In
2007 International Symposium on Signals, Systems
and Electronics, pages 525–528.
Mendoza-Silva, G. M., Torres-Sospedra, J., and Huerta, J.
(2019). A meta-review of indoor positioning systems.
Sensors, 19(20):4507.
Mesmoudi, A., Feham, M., and Labraoui, N. (2013). Wire-
less sensor networks localization algorithms: A com-
prehensive survey. International journal of Computer
Networks & Communications, 5(6):45–64.
MetirionicGmbH (2020). Demo kit - wireless distance mea-
surement. Februar 2020.
Nayak, A. K., Akash, H. C., and Prakash, G. (2013).
Robotic valet parking system. In 2013 Texas Instru-
ments India Educators’ Conference, pages 311–315.
Paul, A. and Sato, T. (2017). Localization in wireless sensor
networks: A survey on algorithms, measurement tech-
niques, applications and challenges. Journal of Sensor
and Actuator Networks, 6(4):24.
Srikanth, S. V., Pramod, P. J., Dileep, K. P., Tapas, S., Patil,
M. U., and Sarat, C. B. N. (2009). Design and imple-
mentation of a prototype smart parking (spark) system
using wireless sensor networks. In 2009 International
Conference on Advanced Information Networking and
Applications Workshops, pages 401–406.
Thrun, S., Burgard, W., and Fox, D. (2005). Probabilis-
tic Robotics (Intelligent Robotics and Autonomous
Agents). The MIT Press.
Future Parking Applications: Wireless Sensor Network Positioning for Highly Automated in-House Parking
717
